
Measurement of Pulsating Flow Using a Self-Attachable Flexible Strain Sensor Based on Adhesive PDMS and CNT


Abstract
:1. Introduction
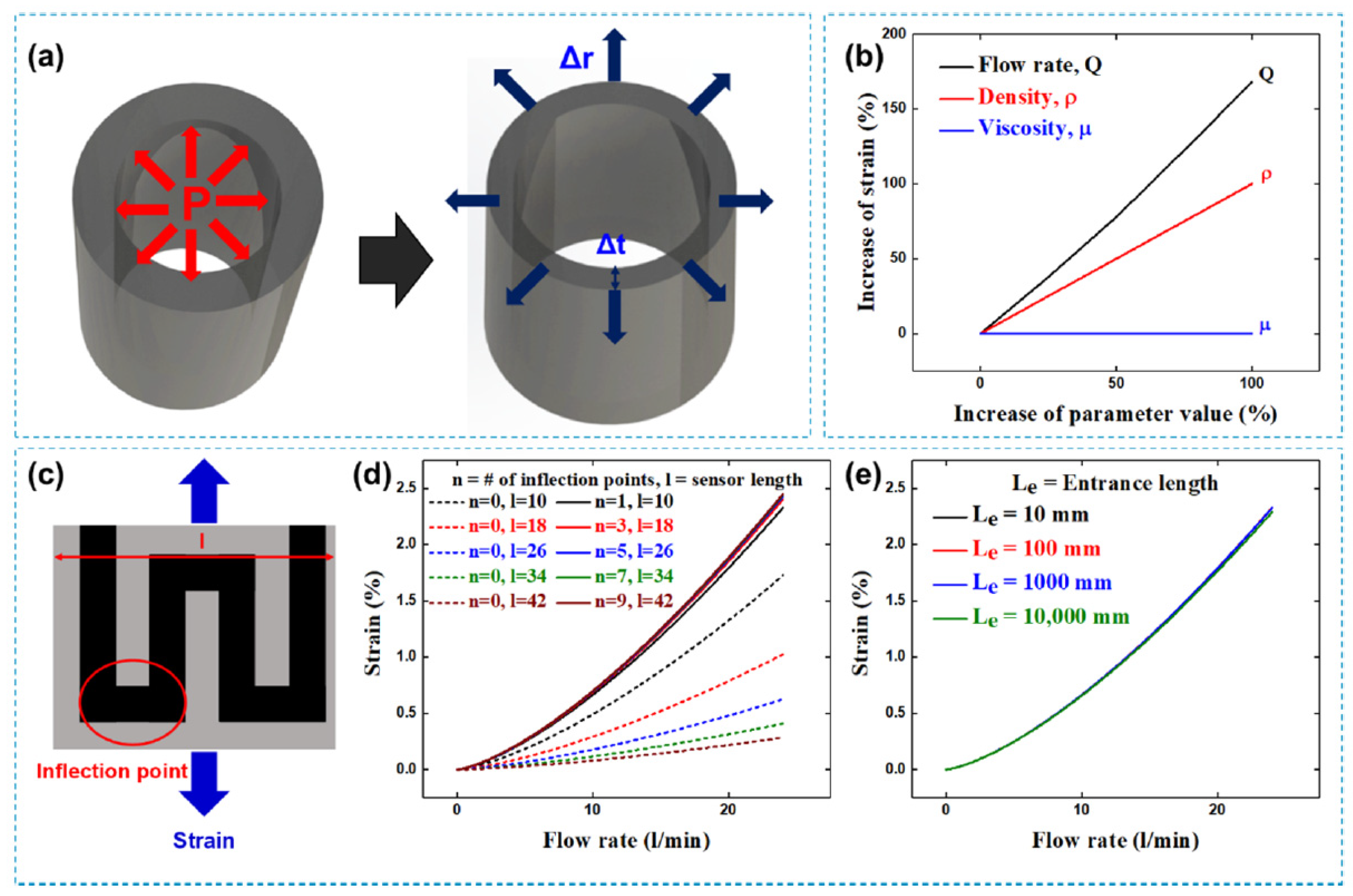
2. Analytical Modeling
3. Materials and Methods
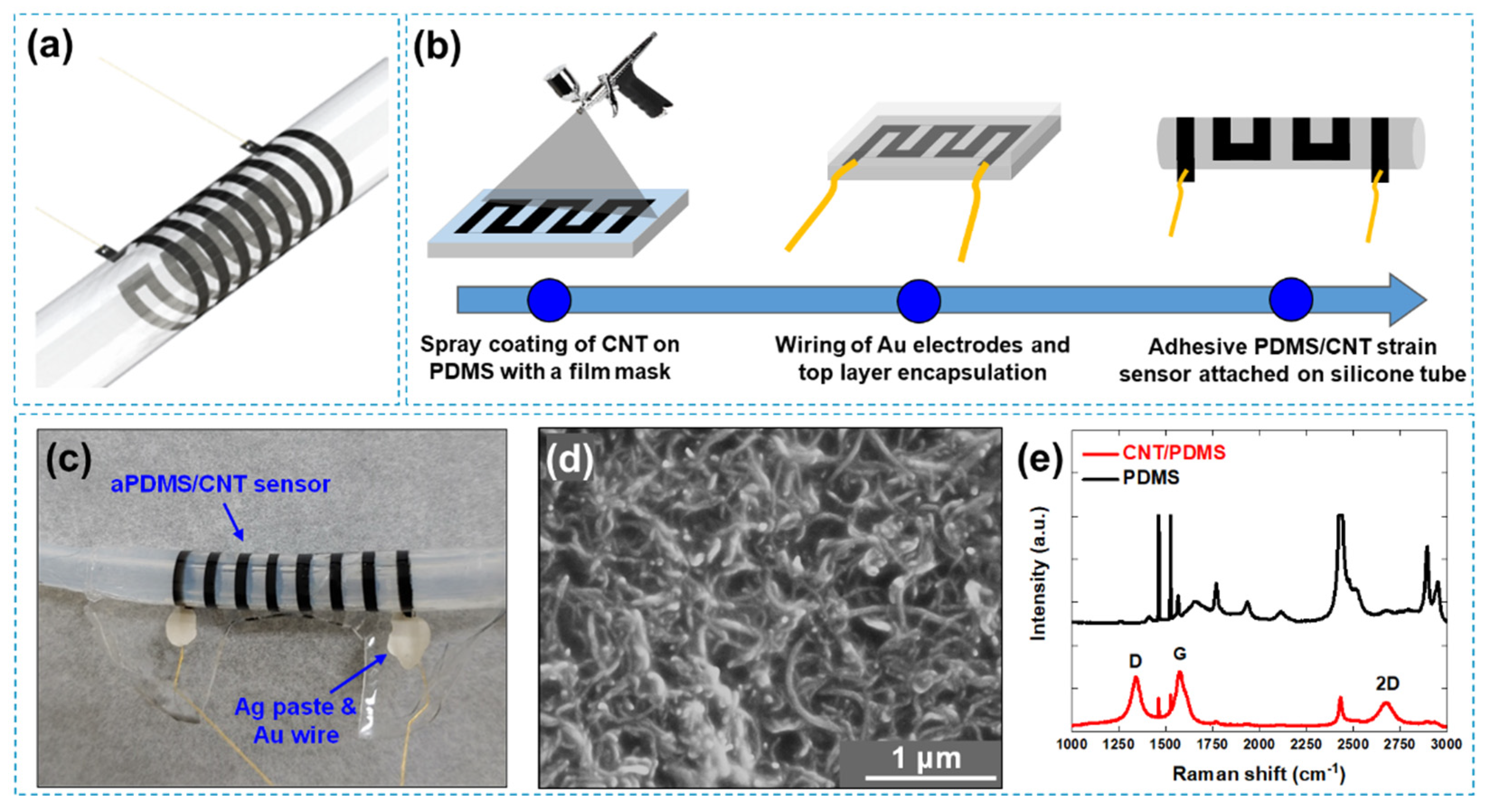
3.1. Preparation of Adhesive PDMS and MWCNT Solution
3.2. The Fabrication Process of Flexible a-PDMS/CNT Strain Sensor
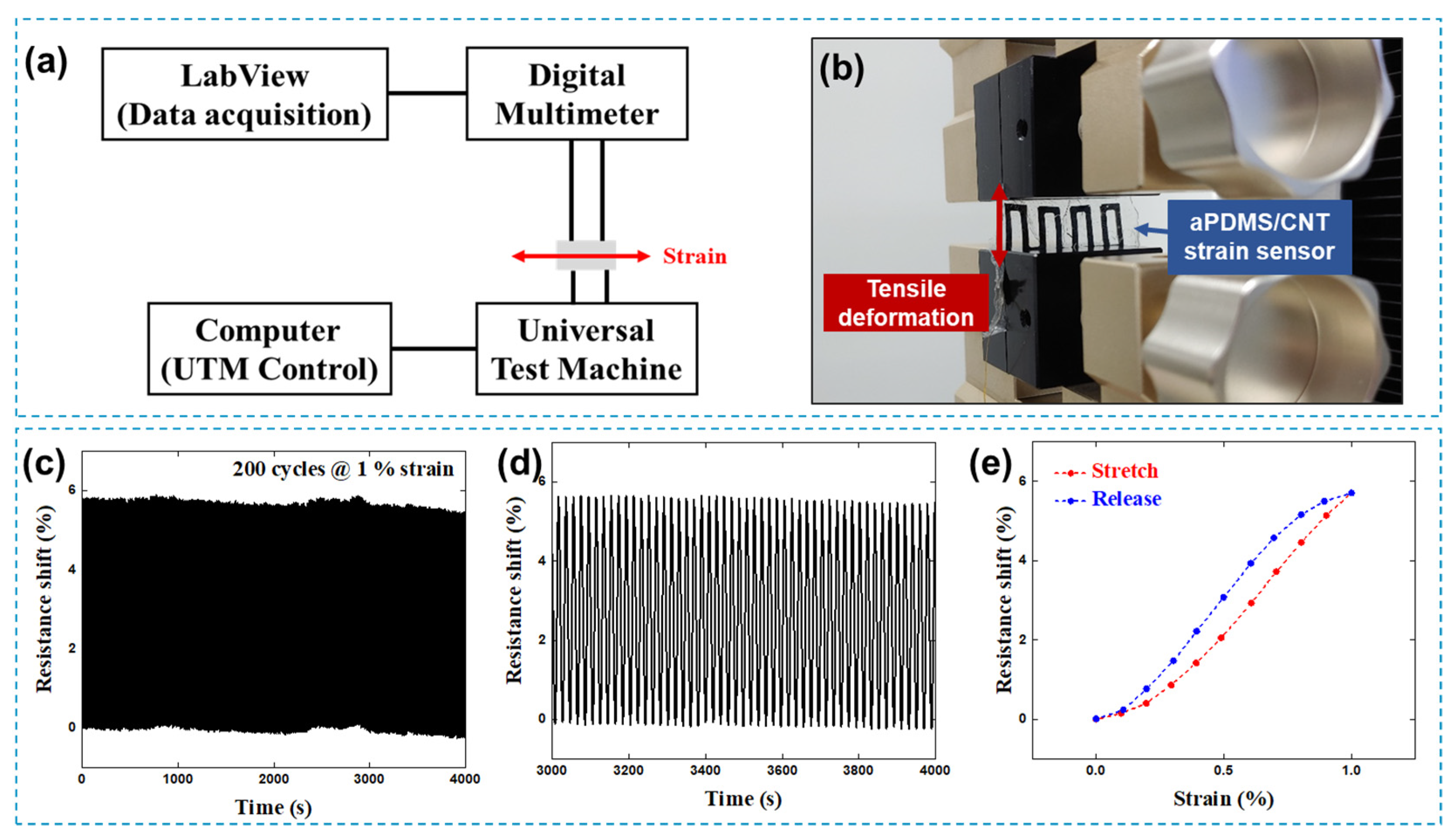
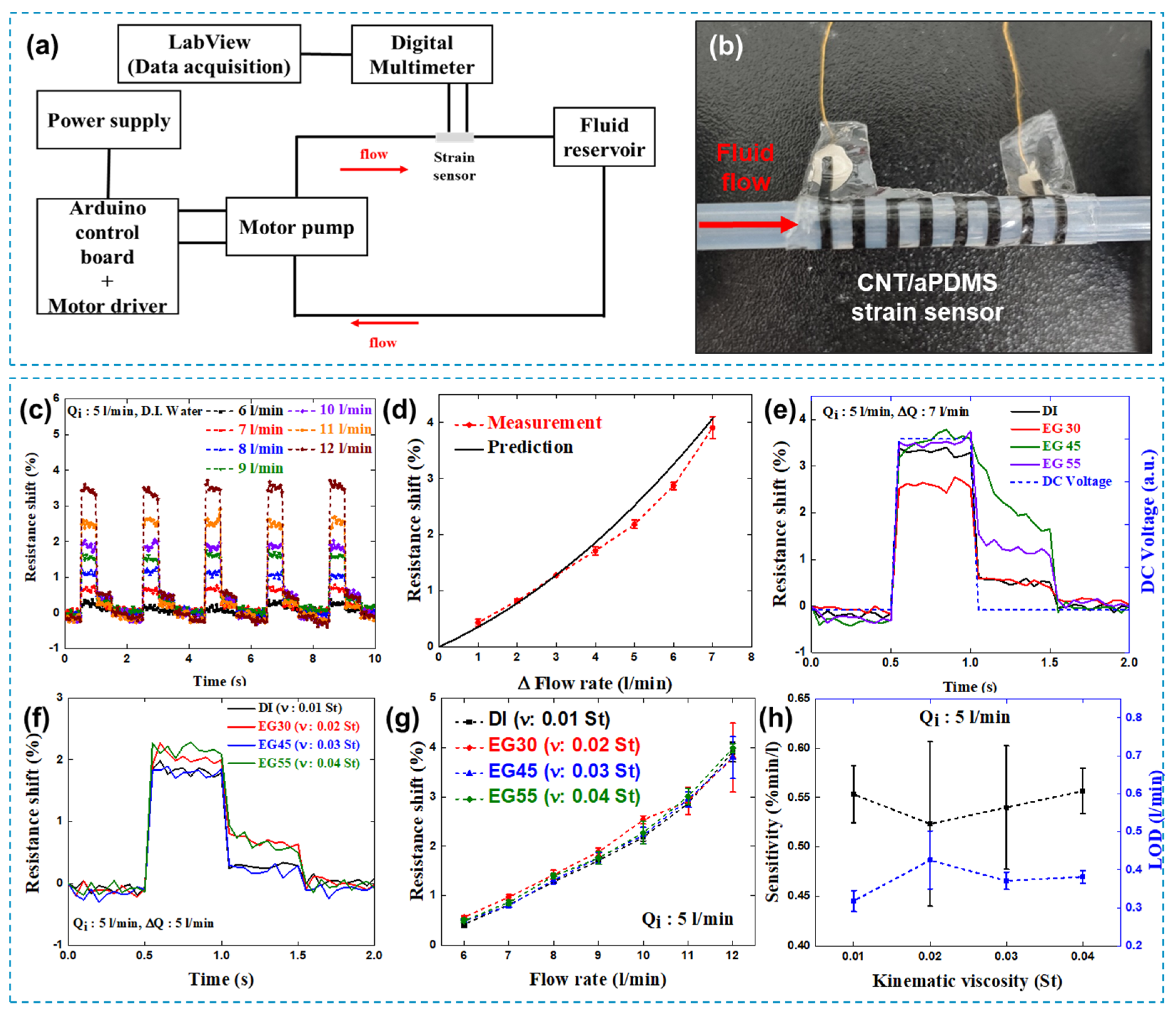
3.3. Sensor Characterization and Measurements
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, D.-Y.; Zuo, W.-M.; Zhang, D.; Zhang, H.-Z.; Li, N.-M. Wrist blood flow signal-based computerized pulse diagnosis using spatial and spectrum features. J. Biomed. Sci. Eng. 2010, 3, 361–366. [Google Scholar] [CrossRef] [Green Version]
- Zironi, G.; Gaiani, S.; Fenyves, D.; Rigamonti, A.; Bolondi, L.; Barbara, L. Value of measurement of mean portal flow velocity by Doppler flowmetry in the diagnosis of portal hypertension. J. Hepatol. 1992, 16, 298–303. [Google Scholar] [CrossRef]
- Nizar, K.; Deutsch, M.; Filmer, S.; Weizman, B.; Beloosesky, R.; Weiner, Z. Doppler studies of the ovarian venous blood flow in the diagnosis of adnexal torsion. J. Clin. Ultrasound 2009, 37, 436–439. [Google Scholar] [CrossRef] [PubMed]
- Reiter, G.; Reiter, U.; Kovacs, G.; Olschewski, H.; Fuchsjäger, M. Blood flow vortices along the main pulmonary artery measured with MR imaging for diagnosis of pulmonary hypertension. Radiology 2015, 275, 71–79. [Google Scholar] [CrossRef] [Green Version]
- El Sankari, S.; Gondry-Jouet, C.; Fichten, A.; Godefroy, O.; Serot, J.M.; Deramond, H.; Meyer, M.E.; Balédent, O. Cerebrospinal fluid and blood flow in mild cognitive impairment and Alzheimer’s disease: A differential diagnosis from idiopathic normal pressure hydrocephalus. Fluids Barriers CNS 2011, 8, 12. [Google Scholar] [CrossRef] [Green Version]
- Tang, D.; Yang, C.; Huang, Y.; Ku, D.N. Wall stress and strain analysis using a three-dimensional thick-wall model with fluid-structure interactions for blood flow in carotid arteries with stenoses. Comput. Struct. 1999, 72, 341–356. [Google Scholar] [CrossRef]
- Lee, K.W.; Xu, X.Y. Modelling of flow and wall behaviour in a mildly stenosed tube. Med. Eng. Phys. 2002, 24, 575–586. [Google Scholar] [CrossRef]
- Saito, M.; Ikenaga, Y.; Matsukawa, M.; Watanabe, Y.; Asada, T.; Lagrée, P.Y. One-dimensional model for propagation of a pressure wave in a model of the human arterial network: Comparison of theoretical and experimental results. J. Biomech. Eng. 2011, 133, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Hirsch, S.; Klatt, D.; Freimann, F.; Scheel, M.; Braun, J.; Sack, I. In vivo measurement of volumetric strain in the human brain induced by arterial pulsation and harmonic waves. Magn. Reson. Med. 2013, 70, 671–683. [Google Scholar] [CrossRef]
- Vilkomerson, D.; Chilipka, T. Implantable doppler system for self-monitoring vascular grafts. In Proceedings of the IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; Volume 1, pp. 461–465. [Google Scholar]
- Ejeian, F.; Azadi, S.; Razmjou, A.; Orooji, Y.; Kottapalli, A.; Warkiani, M.E.; Asadnia, M. Design and applications of MEMS flow sensors: A review. Sens. Actuators A Phys. 2019, 295, 483–502. [Google Scholar] [CrossRef]
- Kuo, J.T.W.; Yu, L.; Meng, E. Micromachined thermal flow sensors-A review. Micromachines 2012, 3, 550–573. [Google Scholar] [CrossRef] [Green Version]
- Balakrishnan, V.; Dinh, T.; Phan, H.P.; Dao, D.V.; Nguyen, N.T. Highly sensitive 3C-SiC on glass based thermal flow sensor realized using MEMS technology. Sens. Actuators A Phys. 2018, 279, 293–305. [Google Scholar] [CrossRef]
- Idjeri, B.; Laghrouche, M.; Boussey, J. Wind Measurement Based on MEMS Micro-Anemometer with High Accuracy Using ANN Technique. IEEE Sens. J. 2017, 17, 4181–4188. [Google Scholar] [CrossRef]
- Shikida, M.; Yoshikawa, K.; Iwai, S.; Sato, K. Flexible flow sensor for large-scale air-conditioning network systems. Sens. Actuators A Phys. 2012, 188, 2–8. [Google Scholar] [CrossRef]
- Ghouila-Houri, C.; Gallas, Q.; Garnier, E.; Merlen, A.; Viard, R.; Talbi, A.; Pernod, P. High temperature gradient calorimetric wall shear stress micro-sensor for flow separation detection. Sens. Actuators A Phys. 2017, 266, 232–241. [Google Scholar] [CrossRef] [Green Version]
- Hasegawa, Y.; Kawaoka, H.; Yamada, T.; Matsushima, M.; Kawabe, T.; Shikida, M. Respiration and heartbeat signal detection from airflow at airway in rat by catheter flow sensor with temperature compensation function. J. Micromech. Microeng. 2017, 27, 125016. [Google Scholar] [CrossRef]
- Sazhin, O. Liquid flow meter based on a thermal anemometer microsensor. J. Appl. Fluid Mech. 2016, 9, 1991–1996. [Google Scholar] [CrossRef]
- Kersjes, R.; Eichholz, J.; Langerbein, A.; Manoli, Y.; Mokwa, W. An integrated sensor for invasive blood-velocity measurement. Sens. Actuators A Phys. 1993, 37, 674–678. [Google Scholar] [CrossRef]
- Fiorillo, A.S.; Critello, C.D.; Pullano, A.S. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Takahashi, H.; Nakai, A.; Shimoyama, I. Waterproof airflow sensor for seabird bio-logging using a highly sensitive differential pressure sensor and nano-hole array. Sens. Actuators A Phys. 2018, 281, 243–249. [Google Scholar] [CrossRef]
- Kottapalli, A.G.P.; Tan, C.W.; Olfatnia, M.; Miao, J.M.; Barbastathis, G.; Triantafyllou, M. A liquid crystal polymer membrane MEMS sensor for flow rate and flow direction sensing applications. J. Micromech. Microeng. 2011, 21, 085006. [Google Scholar] [CrossRef]
- Mistry, K.K.; Mahapatra, A. Design and simulation of a thermo transfer type MEMS based micro flow sensor for arterial blood flow measurement. Microsyst. Technol. 2012, 18, 683–692. [Google Scholar] [CrossRef]
- Zhang, Q.; Ruan, W.; Wang, H.; Zhou, Y.; Wang, Z.; Liu, L. A self-bended piezoresistive microcantilever flow sensor for low flow rate measurement. Sens. Actuators A Phys. 2010, 158, 273–279. [Google Scholar] [CrossRef]
- Sharma, P.; Motte, J.F.; Fournel, F.; Cross, B.; Charlaix, E.; Picard, C. A Direct Sensor to Measure Minute Liquid Flow Rates. Nano Lett. 2018, 18, 5726–5730. [Google Scholar] [CrossRef]
- Kottapalli, A.G.P.; Bora, M.; Kanhere, E.; Asadnia, M.; Miao, J.; Triantafyllou, M.S. Cupula-inspired hyaluronic acid-based hydrogel encapsulation to form biomimetic MEMS flow sensors. Sensors 2017, 17, 1728. [Google Scholar] [CrossRef] [Green Version]
- Sengupta, D.; Kottapalli, A.G.P.; Chen, S.H.; Miao, J.M.; Kwok, C.Y.; Triantafyllou, M.S.; Warkiani, M.E.; Asadnia, M. Characterization of single polyvinylidene fluoride (PVDF) nanofiber for flow sensing applications. AIP Adv. 2017, 7, 105205. [Google Scholar] [CrossRef]
- Liang, Z.; Guo, X.; Yang, B.; Zhang, T. Design and characterization of a novel biaxial bionic hair flow sensor based on resonant sensing. Sensors 2020, 20, 4483. [Google Scholar] [CrossRef] [PubMed]
- Kottapalli, A.G.P.; Asadnia, M.; Karavitaki, K.D.; Warkiani, M.E.; Miao, J.; Corey, D.P.; Triantafyllou, M. Engineering biomimetic hair bundle sensors for underwater sensing applications. AIP Conf. Proc. 2018, 1965, 160003. [Google Scholar]
- Kottapalli, A.G.P.; Asadnia, M.; Hans, H.; Miao, J.M.; Triantafyllou, M.S. Harbor seal inspired MEMS artificial micro-whisker sensor. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; Volume 3, pp. 741–744. [Google Scholar]
- Kuoni, A.; Holzherr, R.; Boillat, M.; de Rooij, N.F. Polyimide membrane with ZnO piezoelectric thin film pressure transducers as a differential pressure liquid flow sensor. J. Micromech. Microeng. 2003, 13, S103. [Google Scholar] [CrossRef]
- Riza, M.A.; Go, Y.I.; Harun, S.W.; Maier, R.R.J. FBG Sensors for Environmental and Biochemical Applications—A Review. IEEE Sens. J. 2020, 20, 7614–7627. [Google Scholar] [CrossRef]
- Zhengyong, Z.L.; Liu, H.-Y.T. Hwa-Yaw Tam Industrial and medical applications of fiber Bragg gratings (Invited Paper). Chin. Opt. Lett. 2016, 14, 120007–120011. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, A.P.; Tam, H.-Y. Microfluidic device integrated with FBG in Co2+ -doped fiber to measure flow rate with nL/s sensitivity. In Proceedings of the 23rd International Conference on Optical Fiber Sensors, Santander, Spain, 2–6 June 2014; Volume 9157, p. 91573I. [Google Scholar]
- Gao, S.; Zhang, A.P.; Tam, H.-Y.; Cho, L.H.; Lu, C. All-optical fiber anemometer based on laser heated fiber Bragg gratings. Opt. Express 2011, 19, 10124. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Y.; Hong, C.; Abro, Z.A.; Wang, L.; Yifan, Z. A new Fiber Bragg Grating sensor based circumferential strain sensor fabricated using 3D printing method. Sens. Actuators A Phys. 2019, 295, 663–670. [Google Scholar] [CrossRef]
- Cheng, L.K.; Schiferli, W.; Nieuwland, R.A.; Franzen, A.; den Boer, J.J.; Jansen, T.H. Development of a FBG vortex flow sensor for high-temperature applications. In Proceedings of the 21st International Conference on Optical Fiber Sensors, Ottawa, ON, Canada, 15–19 May 2011; Volume 7753, p. 77536V. [Google Scholar]
- Liu, Z.; Htein, L.; Cheng, L.-K.; Martina, Q.; Jansen, R.; Tam, H.-Y. Miniature FBG-based fluidic flowmeter to measure hot oil and water. In Proceedings of the 25th Optical Fiber Sensors Conference, Jeju, Korea, 24–28 April 2017; Volume 10323, p. 1032336. [Google Scholar]
- Watanabe, S.; Hasegawa, Y.; Matsushima, M.; Kawabe, T.; Shikida, M. Micromachined Tube Type Thermal Flow Sensor for Adult-Sized Tracheal Intubation Tube. Proceedings 2017, 1, 357. [Google Scholar]
- Yoshida, H.; Hasegawa, Y.; Matsushima, M.; Sugiyama, T.; Kawabe, T.; Shikida, M. Miniaturization of respiratory measurement system in artificial ventilator for small animal experiments to reduce dead space and its application to lung elasticity evaluation. Sensors 2021, 21, 5123. [Google Scholar] [CrossRef]
- Case, M.; Micheli, M.; Arroyo, D.; Hillard, J.; Kocanda, M. Ultrasonic blood flow sensing using doppler velocimetry. Int. J. Smart Sens. Intell. Syst. 2013, 6, 1298–1316. [Google Scholar] [CrossRef] [Green Version]
- Lin, M.; Marshall, C.T.; Qi, Y.; Johnston, S.M.; Badea, C.T.; Piantadosi, C.A.; Johnson, G.A. Quantitative blood flow measurements in the small animal cardiopulmonary system using digital subtraction angiography. Med. Phys. 2009, 36, 5347–5358. [Google Scholar] [CrossRef] [Green Version]
- Badheka, A.; Stucker, S.E.; Turek, J.W.; Raghavan, M.L. Efficacy of Flow Monitoring during ECMO. ASAIO J. 2017, 63, 496–500. [Google Scholar] [CrossRef]
- Seto, R.; Matsuoka, F.; Soh, T.; Itoh, T.; Okada, H.; Masuda, T.; Umeda, T.; Maeda, I.; Tsukamoto, K.; Suzuki, K.; et al. A micro optical blood flow sensor and its application to detection of avian influenza. In Proceedings of the TRANSDUCERS 2009-2009 International Conference on Solid-State Sensors, Actuators and Microsystems, Denver, CO, USA, 21–25 June 2009; pp. 2326–2329. [Google Scholar]
- Iwasaki, W.; Nogami, H.; Takeuchi, S.; Furue, M.; Higurashi, E.; Sawada, R. Detection of site-specific blood flow variation in humans during running by a wearable laser Doppler flowmeter. Sensors 2015, 15, 25507–25519. [Google Scholar] [CrossRef] [Green Version]
- Nogami, H.; Iwasaki, W.; Matsuoka, F.; Akase, K.; Kimura, Y.; Onoe, A.; Higurashi, E.; Takeuchi, S.; Kido, M.; Furue, M. Micro integrated laser Doppler blood flow sensor and its application to dehydration prevention. In Proceedings of the 2009 IEEE 3rd International Conference on Nano/Molecular Medicine and Engineering, Tainan, Taiwan, 18–21 October 2009; pp. 215–220. [Google Scholar]
- Cannata, J.M.; Chilipka, T.; Yang, H.; Han, S.; Ham, S.W.; Rowe, V.L.; Weaver, F.A.; Shung, K.K.; Vilkomerson, D. Development of a flexible implantable sensor for postoperative monitoring of blood flow. J. Ultrasound Med. 2012, 31, 1795–1802. [Google Scholar] [CrossRef] [Green Version]
- Cong, P.; Young, D.J.; Ko, W.H. Novel long-term implantable blood pressure monitoring system. Proc. IEEE Sensors 2004, 3, 1359–1362. [Google Scholar]
- Wang, M.; Chen, J. Volumetric flow measurement using an implantable CMUT array. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 214–222. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Chou, E.F.; Le, J.; Wong, S.; Chu, M.; Khine, M. Soft Wearable Pressure Sensors for Beat-to-Beat Blood Pressure Monitoring. Adv. Healthc. Mater. 2019, 8, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Park, S.J.; Kim, J.; Chu, M.; Khine, M. Flexible Piezoresistive Pressure Sensor Using Wrinkled Carbon Nanotube Thin Films for Human Physiological Signals. Adv. Mater. Technol. 2018, 3, 1–7. [Google Scholar] [CrossRef]
- Boutry, C.M.; Beker, L.; Kaizawa, Y.; Vassos, C.; Tran, H.; Hinckley, A.C.; Pfattner, R.; Niu, S.; Li, J.; Claverie, J.; et al. Biodegradable and flexible arterial-pulse sensor for the wireless monitoring of blood flow. Nat. Biomed. Eng. 2019, 3, 47–57. [Google Scholar] [CrossRef]
- Kartmann, S.; Koch, F.; Koltay, P.; Zengerle, R.; Ernst, A. Single-use capacitive pressure sensor employing radial expansion of a silicone tube. Sens. Actuators A Phys. 2016, 247, 656–662. [Google Scholar] [CrossRef]
- Fan, Q.; Qin, Z.; Gao, S.; Wu, Y.; Pionteck, J.; Mäder, E.; Zhu, M. The use of a carbon nanotube layer on a polyurethane multifilament substrate for monitoring strains as large as 400%. Carbon 2012, 50, 4085–4092. [Google Scholar] [CrossRef]
- Amjadi, M.; Yoon, Y.J.; Park, I. Ultra-stretchable and skin-mountable strain sensors using carbon nanotubes-Ecoflex nanocomposites. Nanotechnology 2015, 26, 375501. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid | Density [kg/m3] | Viscosity [cP] | Kinematic Viscosity [St] |
|---|---|---|---|
| DI | 1000 | 1.00 | 0.01 |
| EG30 | 1040 | 2.16 | 0.02 |
| EG45 | 1060 | 3.22 | 0.03 |
| EG55 | 1072 | 4.30 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ryu, C.; Park, J.; Jung, S.I.; Jang, I.R.; Kim, H.J. Measurement of Pulsating Flow Using a Self-Attachable Flexible Strain Sensor Based on Adhesive PDMS and CNT. Chemosensors 2022, 10, 187. https://doi.org/10.3390/chemosensors10050187
Ryu C, Park J, Jung SI, Jang IR, Kim HJ. Measurement of Pulsating Flow Using a Self-Attachable Flexible Strain Sensor Based on Adhesive PDMS and CNT. Chemosensors. 2022; 10(5):187. https://doi.org/10.3390/chemosensors10050187
Chicago/Turabian StyleRyu, Chaehyun, Jeonhyeong Park, Soon In Jung, Il Ryu Jang, and Hoe Joon Kim. 2022. "Measurement of Pulsating Flow Using a Self-Attachable Flexible Strain Sensor Based on Adhesive PDMS and CNT" Chemosensors 10, no. 5: 187. https://doi.org/10.3390/chemosensors10050187
APA StyleRyu, C., Park, J., Jung, S. I., Jang, I. R., & Kim, H. J. (2022). Measurement of Pulsating Flow Using a Self-Attachable Flexible Strain Sensor Based on Adhesive PDMS and CNT. Chemosensors, 10(5), 187. https://doi.org/10.3390/chemosensors10050187