1. Introduction
Due to their outstanding performance in accuracy, repeatability and efficiency, industrial robots have become one of the most important equipment to replace human resources in the machinery, automobile, electronics, metal, and other industries [
1,
2,
3]. Generally speaking, an industrial robot is a nonlinear dynamic mechanism, which needs to follow a specific trajectory to avoid any possible collision. Therefore, trajectory planning is an essential technique in automated industrial activities using industrial robots. A reasonable trajectory can reduce the vibration and noise of robots and ensure a high trajectory tracking accuracy and motion stability of robots [
4,
5,
6].
In the relevant literature, trajectories are mainly constructed by polynomial, spline, Bezier, NURBS and other interpolation functions. In order to obtain a smooth trajectory with jerk boundary, Jond et al. used polynomials of the orders 3, 4 and 5 to generate an acceleration-continuous trajectory, in which the acceleration values at the start and end motions are non-zero [
7]. Sonja Macfarlane et al. employed a series of fifth-order polynomials to plan a smooth trajectory between two directional points [
8]. Similarly, Bureerat et al. used quintic polynomials to connect the initial and intermediate points, to finally the end point [
9]. Lin et al. proposed a method of a 7-segment acceleration profile motion model based on a time-optimal trajectory, which divided all waypoints into continuous batches, and each batch had two overlaps of waypoints [
10]. Wu et al. proposed a novel point-to-point trajectory planning algorithm (PTPA) to improve the motion efficiency of industrial robots [
11]. Moreover, spline functions have been used as trajectory primitives to ensure acceleration continuity or jerk continuity. Since each control point on the B-spline curve will only affect the parameters within a range of the curve, various B-splines were used to construct joint trajectory. For example, the minimum time trajectory is generated by cubic splines for the robotic manipulator [
12,
13,
14]. Muhammad Zeeshan et al. interpolated the entire fifth-order trajectory with B-spline interpolation method to obtain the minimum time trajectory [
15,
16].
Trajectory optimization is a highly complicated problem due to the nonlinear characteristics of trajectories and the need of motion efficiency, smooth operation and low noise of industrial robots. Many studies take the minimum time [
17,
18,
19,
20,
21], the minimum acceleration [
9,
16] and the minimum energy [
22,
23] as the trajectory planning optimization objectives. In addition, the hybrid optimization methods have become the focus of robot research in recent years. For example, Zhang et al. proposed a multi-objective optimization method for robot trajectory planning under obstacles, including time optimization and acceleration optimization. This method uses quintic B-splines to generate trajectory configurations in the joint space with motion constraints and obstacles constraints [
24]. Wang et al. proposed a new algorithm to define the objective function from two aspects of time and speed [
14]. Zhang et al. proposed an adaptive cuckoo search (ACS) algorithm to optimize the trajectory of quintic B-spline programming [
25]. Ameer adopted an RNN based metaheuristic approach (RNN-MA) to achieve real-time implementation [
26]. Cheng proposed beetle antennae search algorithm (BAS) to tackle the formulated optimization function [
27]. Hybrid algorithms, such as an improved whale optimization algorithm with differential evolution algorithm or particle swarm optimization (IWOA-DE and IWOA-PSO), and new genetic algorithm and adaptive elite genetic algorithm (AEGA-SA) have been proposed to improve the exploration and exploitation capacities of the original algorithm [
21,
28,
29]. Several optimization methods with their characteristics are shown in
Table 1.
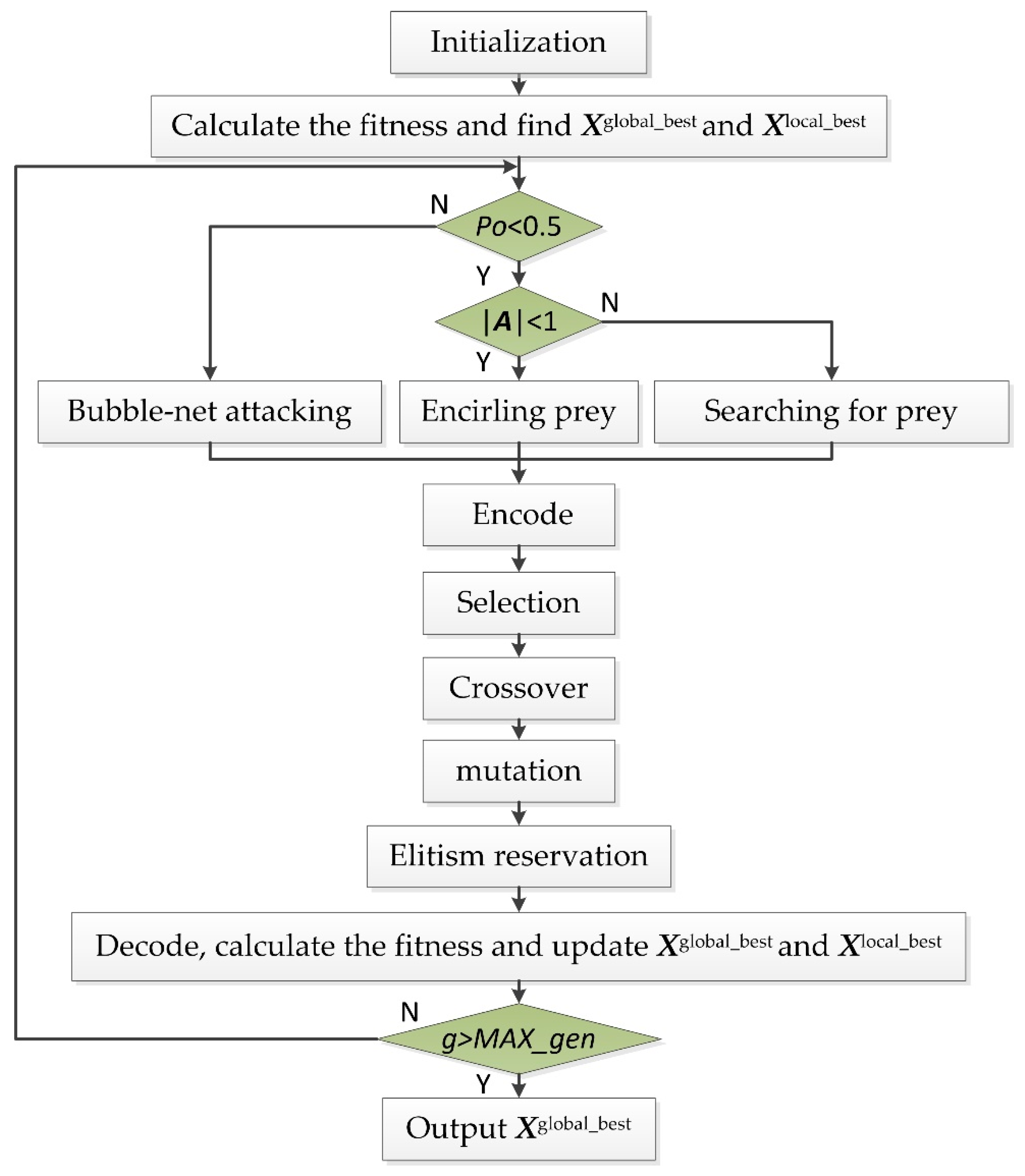
This paper proposes a time-optimal and jerk-continuous trajectory planning technique for industrial robots. This technique is based on fifth-order B-spline and hybrid WOA-GA. Fifth-order B-spline is utilized to interpolate the multi-point trajectory. The WOA-GA combining the advantage of GA and WOA is proposed to solve the time-jerk trajectory optimization problem with nonlinear constraints. The rest of this paper is organized as follows.
Section 2 defines the problems of trajectory optimization. In
Section 3, the fifth-order B-spline is chosen to interpolate the joint trajectory, and the hybrid WOA-GA is presented. In
Section 4, we compare the simulation results from different optimization algorithms, and
Section 5 is the conclusion.
2. Problem Formulation
Trajectory planning is mostly carried out in the joint space, which can ensure the stability of joint motion and avoid motion jump of the manipulator, while planning trajectories in the operation space. Thus, this paper focus on planning trajectories in the joint space.
We define the optimal planning problem similarly to Ref. [
12]. Two objective functions, including the integral of the squared jerk along the whole trajectory and the total execution time, are minimized to obtain the optimal whole trajectory. These two terms have opposite effects. This implies that reducing the total execution time will lead to trajectories with large values of the kinematic quantities, while reducing the integral of the squared jerk along the whole trajectory will lead to a smoother trajectory with low efficiency. The trade-off between these two objectives can be achieved by legitimately adjusting the weights of the two objectives. Therefore, the optimization problem can be formulated as:
The meaning of the symbols in Equation (1) is described in
Table 2.
4. Results and Discussion
In order to verify the feasibility of the proposed method, the numerical simulations were tested by solving six unconstrainted optimization problems and a time-optimal trajectory planning problem using 5th-order B-splines. WOA-GA was programed in MATLAB R2018b, as well as WOA, GA, IWOA-PSO [
29] and ACS [
25], which were utilized for comparative analysis. The configurations of the personal computer were a Core i5-1035G1 CPU with 16 GB of RAM. The parameter configuration of each algorithm are presented in
Table 3. All the algorithms were initialized with the same population for each run. For WOA-GA and GA, we utilized 14 bits to code each time interval. The best-so-far feasible solution in the population obtained at the end of generations was utilized to evaluate WOA-GA on effectiveness and stability. The mean (‘MEAN’) and standard deviations (‘STD’) of the best-so-far solutions are utilized as evaluation indices, formulated as follows:
where
fibest is the best-so-far feasible solution obtained in the
ith run and
Nr is the number of runs. Note that the smaller the values of MEAN and STD, the more reliable and stable the solutions that the algorithm can provide [
34].
4.1. Application 1: WOA-GA for Test Functions
The first six unconstrainted optimization problems are classical benchmark functions shown in
Table 4. These functions include unimodal (
F1–
F2), variable-dimension multimodal (
F3–
F4) and fixed-dimension multimodal (
F5–
F6) benchmarks.
Table 4 shows the details of the test functions. Note that only one optimal solution exists in the unimodal functions to evaluate the convergence rate and exploitation capacity of the algorithm, and a global optimal solution with several local ones exist in the multimodal functions to evaluate the exploration capacity of the algorithm. For each test function, WOA-GA was performed 20 times as well as WOA, GA, IWOA-PSO and ACS. For all algorithm, the test population size and the maximum iteration were set to 30 and 500, respectively.
Table 5 reports the statistical results for the unimodal function and shows that WOA-GA can obtain the global optimal solution for
F1 and
F2.
Table 6 reports the statistical results for the variable-dimension multimodal and fixed-dimension multimodal functions. WOA-GA can obtain the near-optimal solution for
F3 and
F4, and the global optimal solution for
F5 and
F6.
Table 5 and
Table 6 indicate that WOA-GA has advantages in global searching and can prevent falling into a local optimum, and demonstrate that WOA-GA is competitive with other algorithms. Hence, although the time consumption is high, the proposed WOA-GA can provide good exploration and exploitation capabilities.
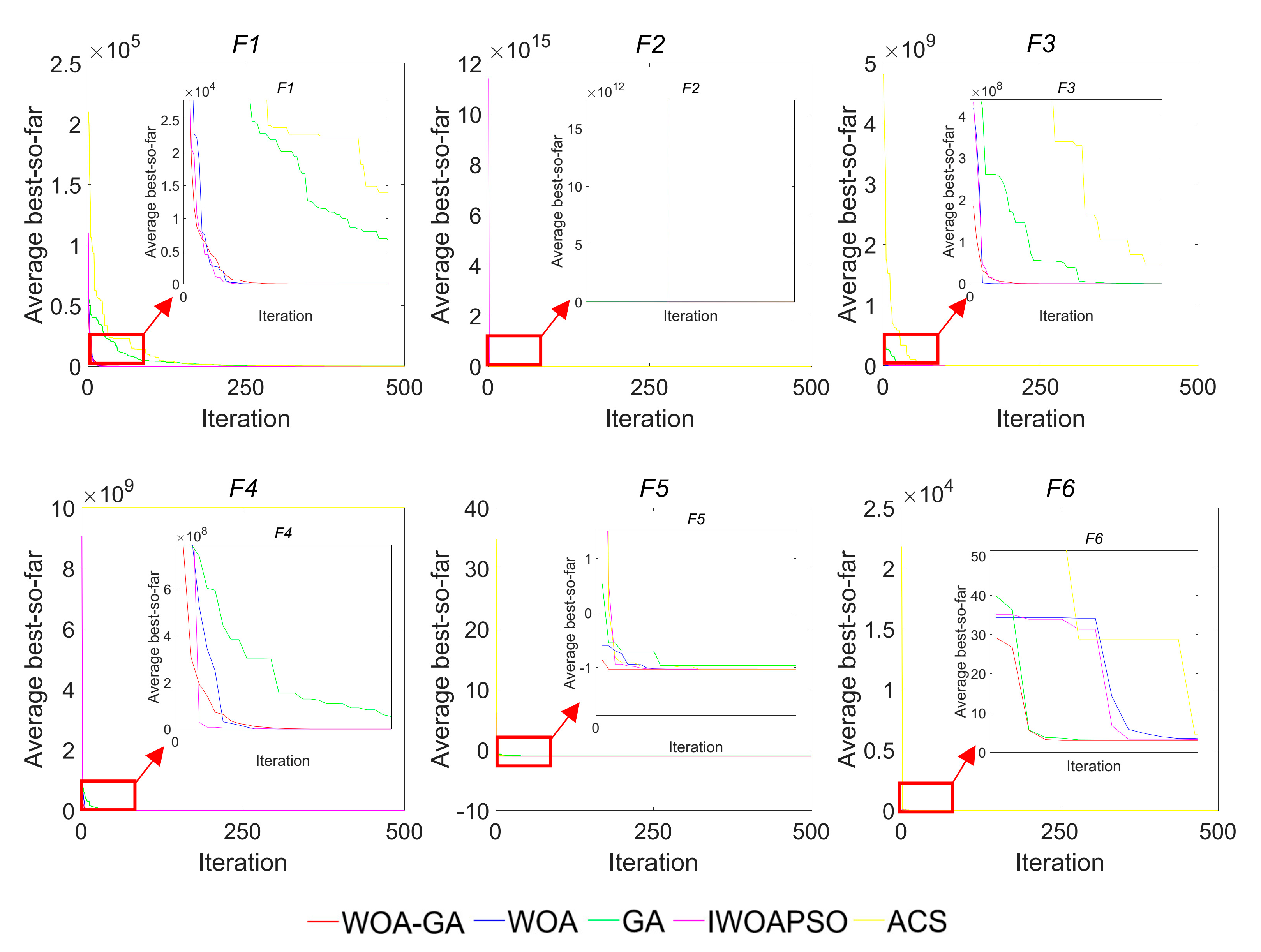
Figure 2 shows the convergence curves from WOA-GA, WOA, GA, IWOA-PSO and ACS. WOA, IWOA-PSO and ACS have an advantage on the local space search and can converge rapidly, but they are easily to trap in a local optimum in low iterations. GA has the advantage on global space search, but it converges slowly and needs more generations to obtain the best fitness. In each iteration of WOA-GA, WOA follows several generations of GA. Thus, the global search capacity of WOA is enhanced by GA, and the local search ability of GA is improved by WOA. With the positive interaction between WOA and GA, the exploration and exploitation abilities of WOA-GA are improved. The proposed WOA-GA can converge rapidly and obtain the best fitness compared with WOA, GA, IWOA-PSO and ACS.
4.2. Application 2: WOA-GA for Time-Optimal Trajectory Planning Problem
A typical multi-point trajectory task for a 6-DOF industrial robot was employed [
12]. The desired positions and kinematic constraints of test task are listed in
Table 7 and
Table 8, respectively. Since the order of magnitudes of the integral of the squared jerk is much greater than that of the total execution time,
wT and
wJ were set as 0.9999 and 0.0001 to achieve the trade-off between two objectives. For all algorithms, a test population size of 30 and the maximum iteration of 100 and 500 were utilized to solve this problem. WOA-GA was performed 10 times as well as WOA, GA, IWOA-PSO and ACS.
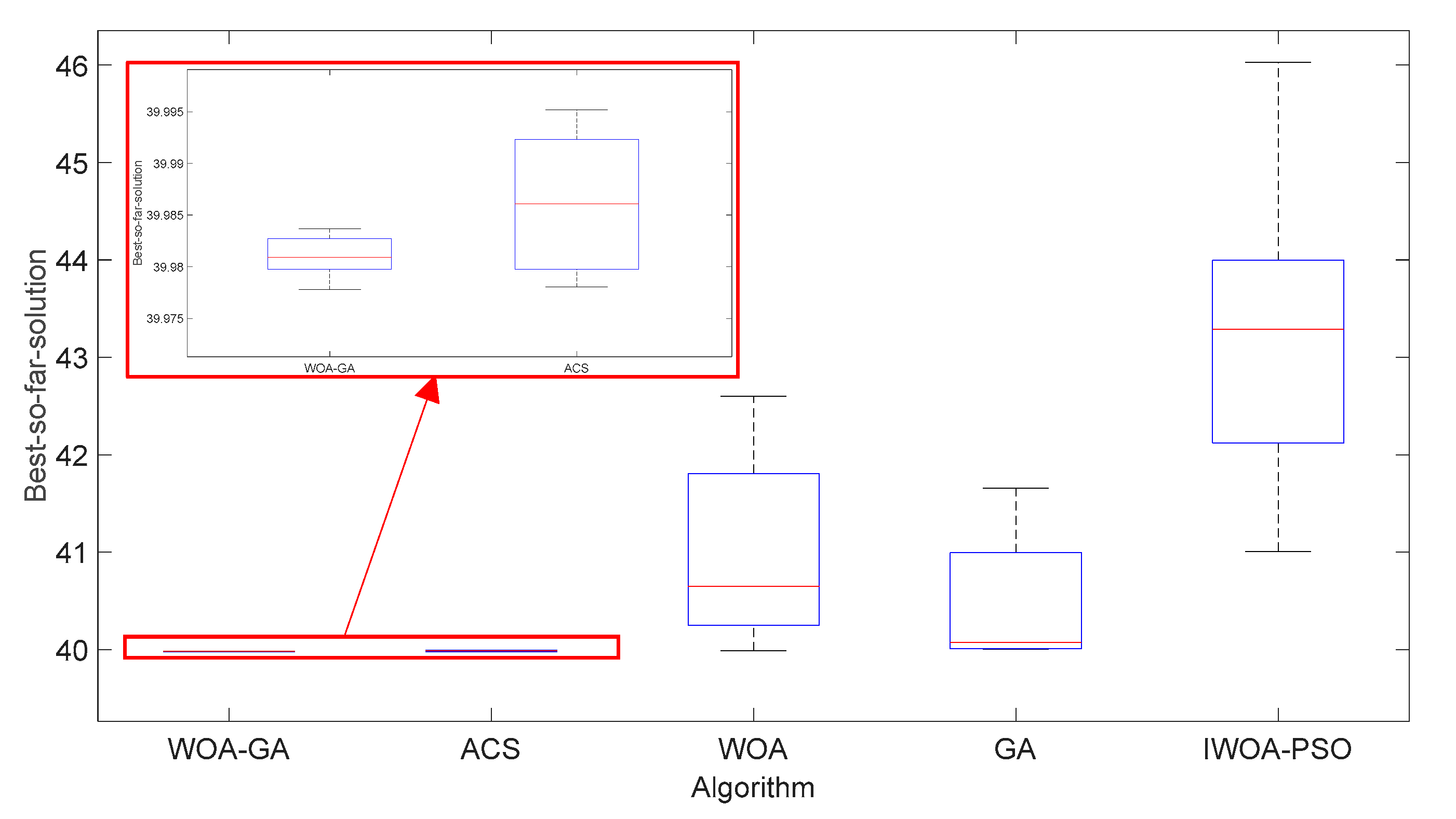
Table 9 shows the comparisons of the optimization results obtained using WOA-GA, WOA, GA, IWOA-PSO and ACS. WOA-GA is able to converge best in the test task, and the mean and standard deviations are also the smallest, which implies that WOA-GA has a good stability.
Figure 3 shows the distributions of the best-so-far solutions from WOA-GA, WOA, GA, IWOA-PSO and ACS. Additionally, the percentage of performance rank in
Table 9 indicates that WOA-GA mostly achieves a better performance than other benchmark algorithms.
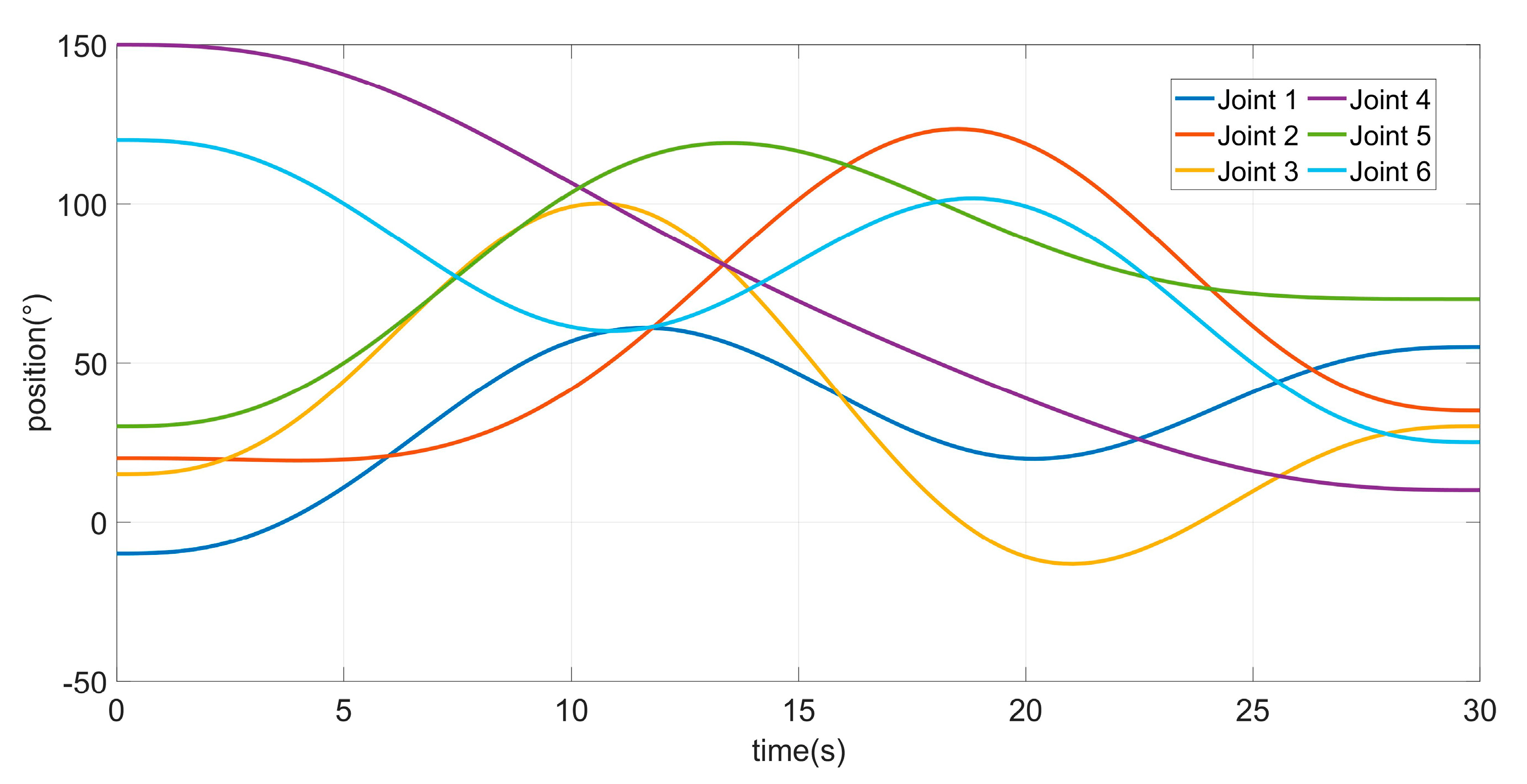
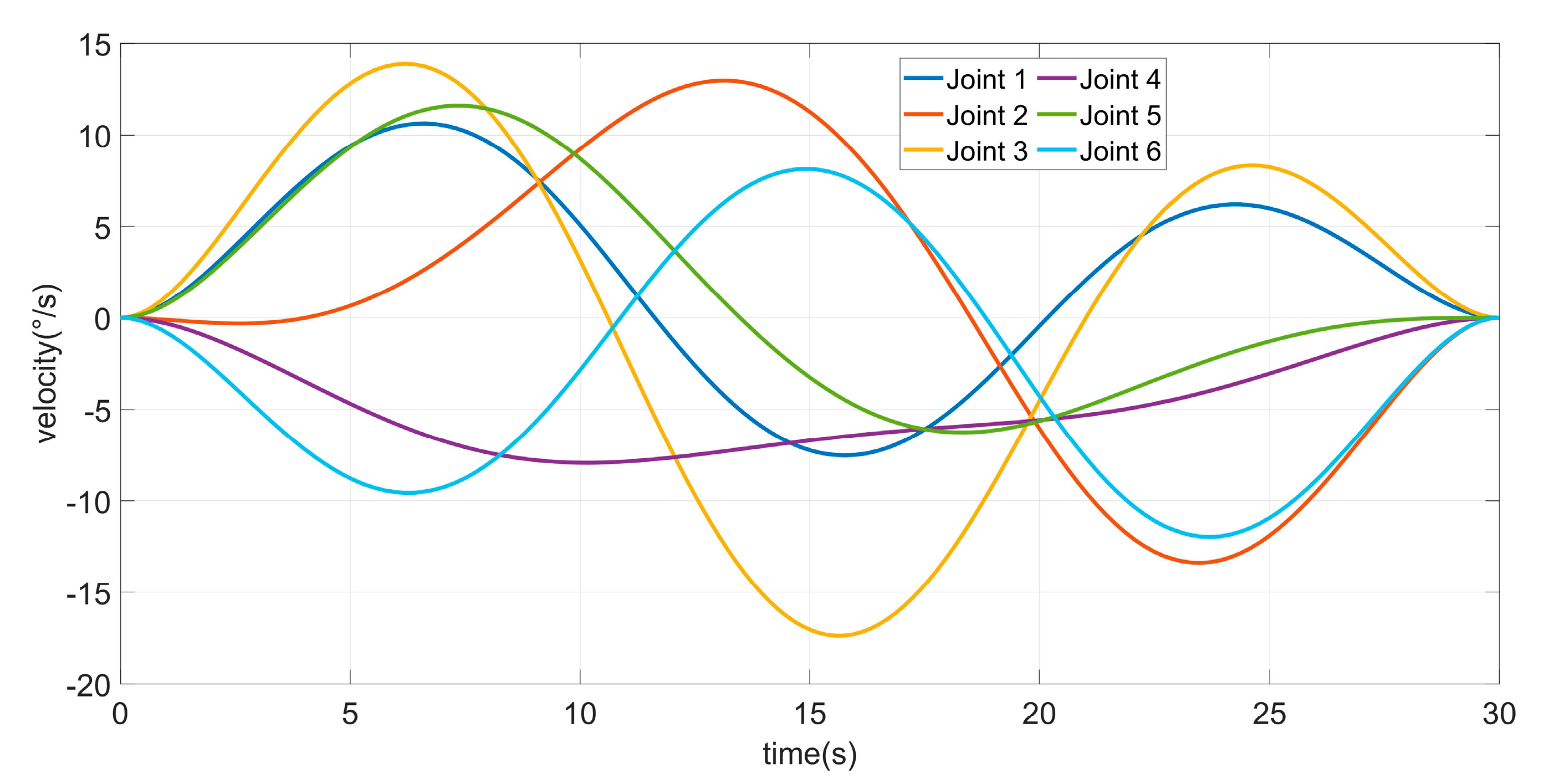
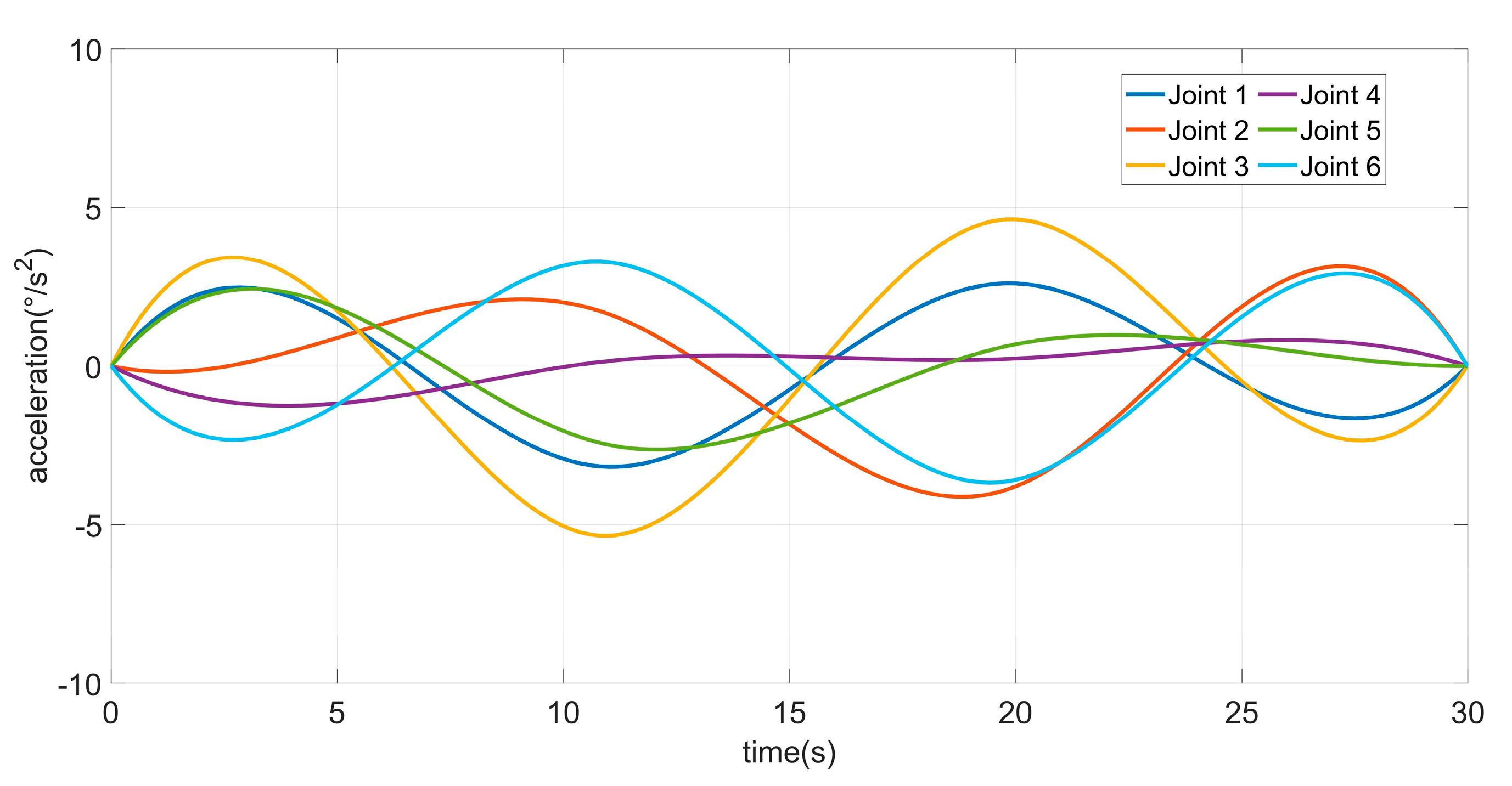
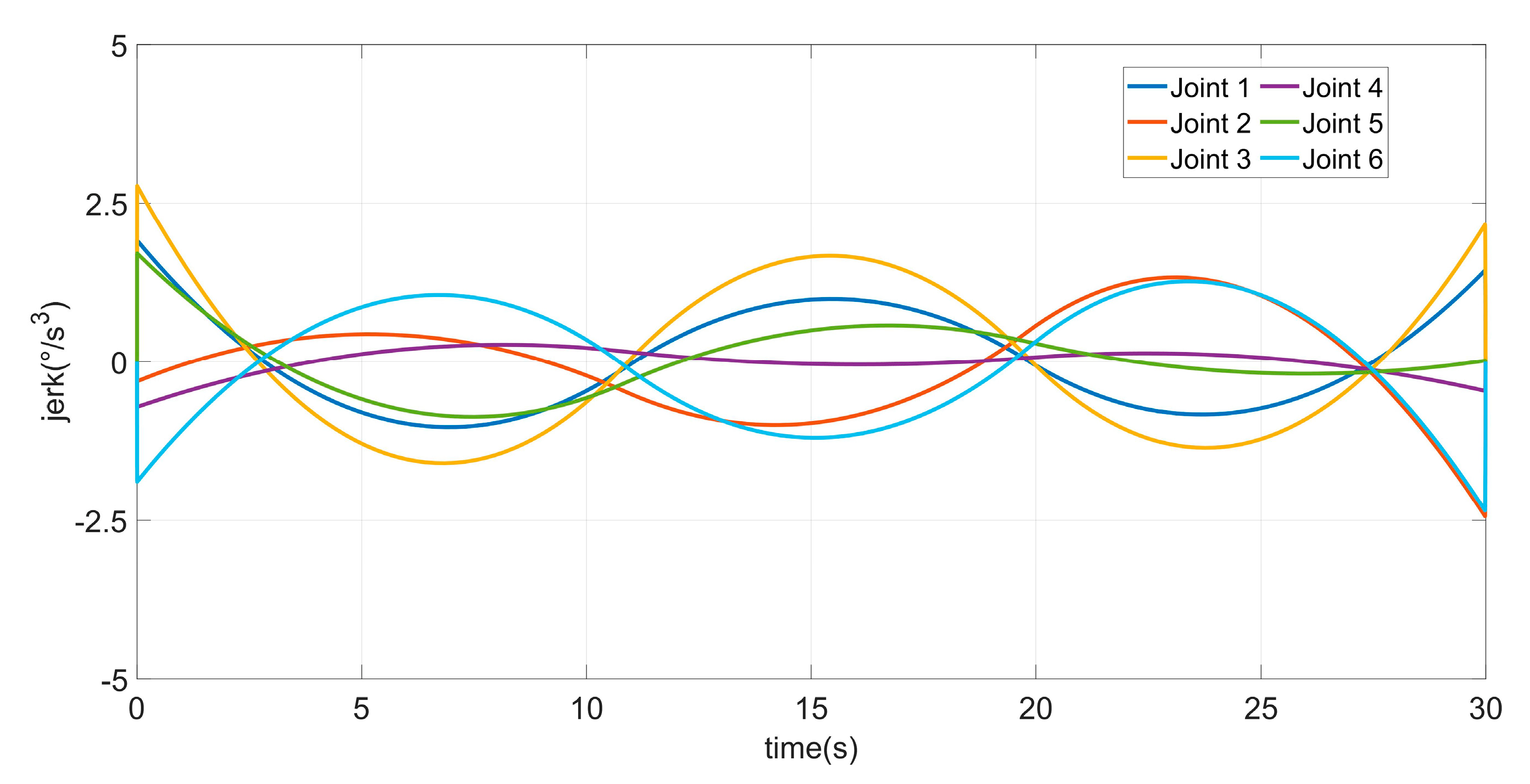
The travelling time of the best solution from WOA-GA is 29.9930 s, where
T1 = 0.0030 s,
T2 = 10.8240 s,
T3 = 8.9690 s,
T4 = 10.1850 s and
T5 = 0.0120 s.
Figure 4,
Figure 5,
Figure 6 and
Figure 7 illustrate the trajectory curves of the industrial robot and their derivatives, including jerk, acceleration and velocity. As shown in
Figure 7, the jerk curves of all joints were continuous, which resulted in the smoothness of the optimized trajectories. Furthermore, the values of jerk, acceleration and velocity were zero at the start and end movement. The motion curves were all bound under the kinematic constraints all the time. Therefore, the proposed method is an effective time-jerk optimal trajectory planning tool for industrial robots.
5. Conclusions
In this article, we proposed a new methodology for time-optimal and jerk-continuous trajectory planning of industrial robots. Fifth-order B-spline was adopted to interpolate the multi-point trajectory in the joint space. The proposed WOA-GA combining the advantages of WOA and GA is utilized to solve the time-jerk optimal trajectory planning problem with nonlinear constraints. Simulations were carried out to verify the effectiveness of the proposed methodology. The comparison results of the best-so-far feasible solutions showed that WOA-GA provides the best results compared with WOA, GA, IWOA-PSO and ACS. Furthermore, the proposed WOA-GA algorithm has good stability. The optimized motion curves obtained by the proposed methodology were all bound under the kinematic constraints all the time. Therefore, these results demonstrate that the proposed methodology is an effective tool for industrial robots to generate time-jerk optimal trajectories.
Future work will be devoted to extending WOA-GA to optimize other trajectory models based on polynomial and NURBS. The effectiveness of the proposed technique may further be investigated by experiments.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}