
Multi-Objective Optimal Scheduling for Multi-Renewable Energy Power System Considering Flexibility Constraints

Abstract
:1. Introduction
- 1
- Considering the operation cost, renewable energy curtailment rates, and power fluctuations on the tie-line, a day-ahead scheduling model for the MREPS is established.
- 2
- MOPSO and a fuzzy comprehensive evaluation method are used to evaluate the day-ahead scheduling model, and a day-ahead scheduling strategy for the MREPS considering flexibility is proposed.
2. Model for Multi-Objective Optimal Scheduling
2.1. Objective Function
2.1.1. Operation Cost
2.1.2. Renewable Energy Curtailment Rate
2.1.3. Tie-Line Power Fluctuations
2.2. Constraint Conditions
2.2.1. Constraints on the Power Balance
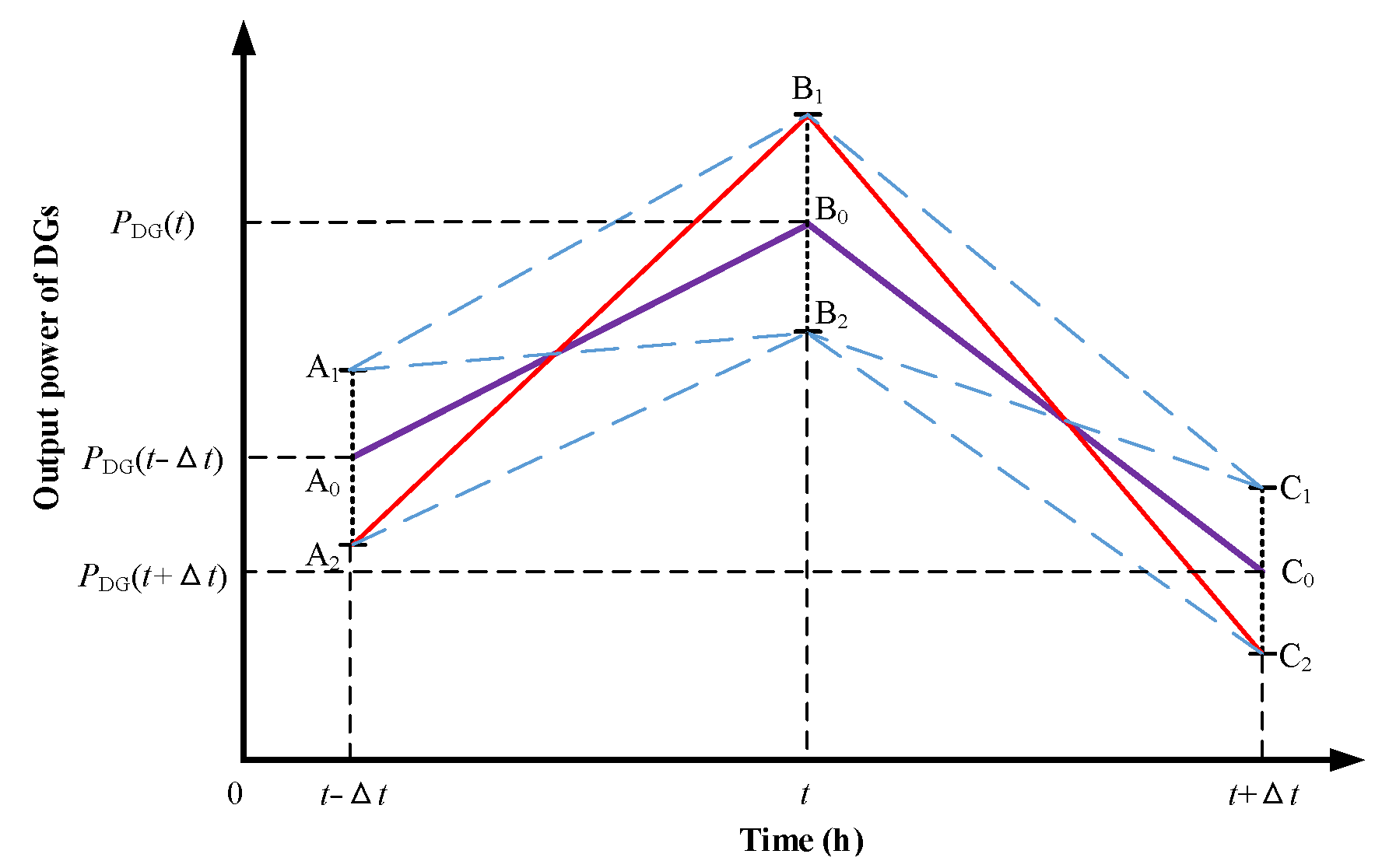
2.2.2. Constraints of Output Power for DGs Considering Flexibility
2.2.3. Constraints of the ESS Considering Flexibility in Charging and Discharging
2.2.4. Tie-Line Transmission Power Constraints in Consideration of Flexibility
3. Algorithm for the Solution of the Multiobjective Optimization Model
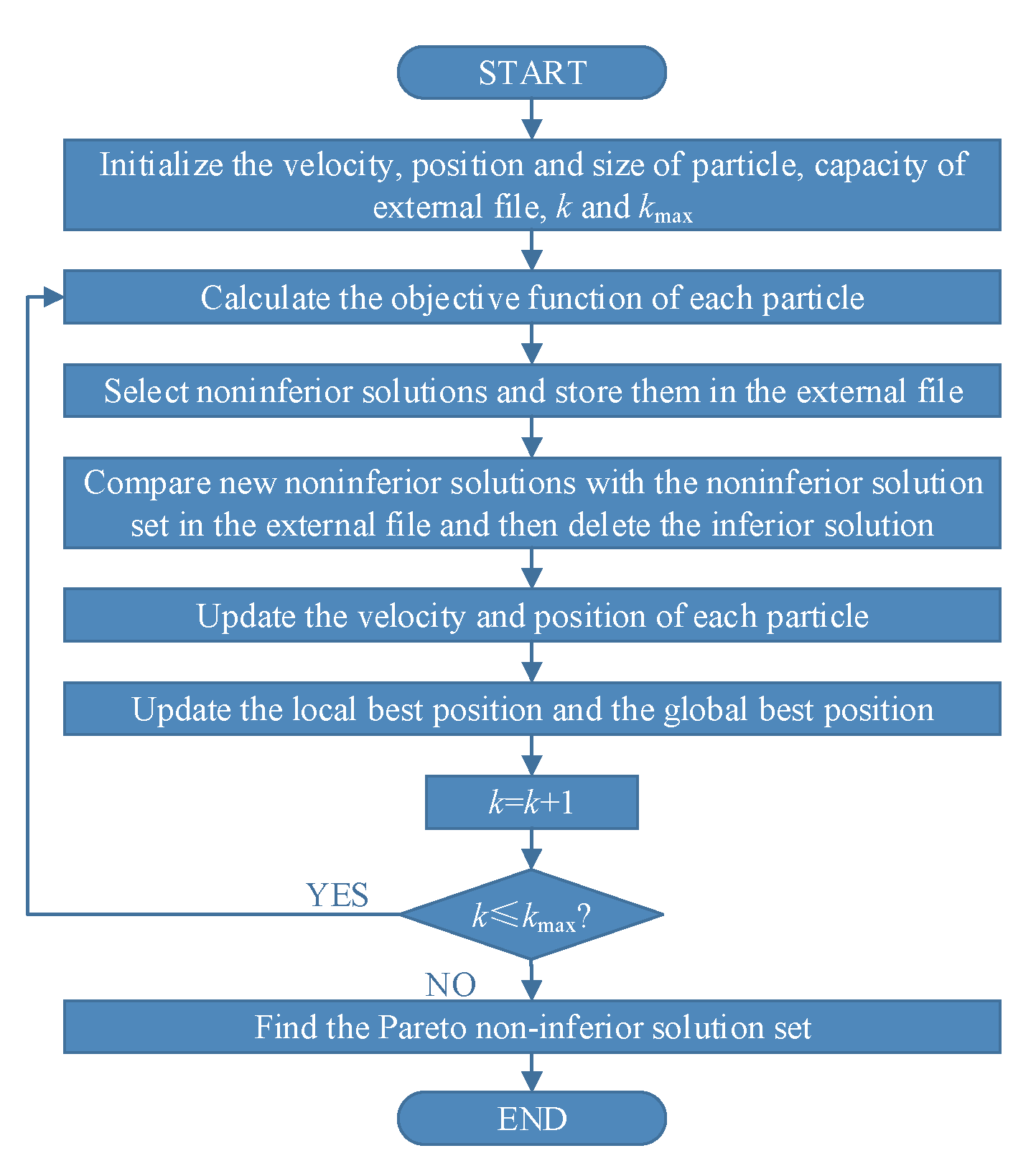
3.1. MOPSO
3.2. Fuzzy Comprehensive Analysis Methodology
- (1)
- For determining the membership degree of each objective in each Pareto non-dominated solution, a single-factor fuzzy evaluation is adopted. The fuzzy relation matrix can then be obtained as follows:where rij is the membership degree of the ith objective in the jth Pareto non-dominated solution. rij can be calculated as follows:where and are the minimum and maximum expectations of the decision-maker for the ith objective, respectively.
- (2)
- The analytic hierarchy process (AHP)-entropy weight method (EWM) can be employed to determine the comprehensive weight vector for each objective. Assume that the comprehensive weight vector is:where ωi is the comprehensive weight vector of the ith objective. A can then be calculated using the following equation:where and are the objective weights based on AHP and EWM, respectively. The discussion on AHP [26] and EWM [27] is excluded from this paper given that both have been extensively analyzed in the literature.
- (3)
- The comprehensive fuzzy evaluation vector B can be calculated as follows:where bj is the membership degree of the jth Pareto non-dominated solution.
4. Case Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hong, Z.; Hao, S.; Zhang, Q.; Kong, G. Microgrid Spinning Reserve Optimization with Improved Information Gap Decision Theory. Energies 2018, 11, 2347. [Google Scholar]
- Cz, A.; Hc, A.; Lu, L.; Zhang, H.; Zhang, X.; Li, G. Coordination planning of wind farm, energy storage and transmission network with high-penetration renewable energy. Int. J. Electr. Power Energy Syst. 2020, 120, 105944. [Google Scholar]
- Li, J.; Liu, J.; Yan, P.; Li, X.; Zhou, G.; Yu, D. Operation Optimization of Integrated Energy System under a Renewable Energy Dominated Future Scene Considering Both Independence and Benefit: A Review. Energies 2021, 14, 1103. [Google Scholar] [CrossRef]
- Menezes, R.; Soriano, G.D.; Aquino, R. Locational Marginal Pricing and Daily Operation Scheduling of a Hydro-Thermal-Wind-Photovoltaic Power System Using BESS to Reduce Wind Power Curtailment. Energies 2021, 14, 1441. [Google Scholar] [CrossRef]
- Wang, L.; Li, Q.; Ding, R.; Sun, M.; Wang, G. Integrated scheduling of energy supply and demand in microgrids under uncertainty: A robust multi-objective optimization approach. Energy 2017, 130, 1–14. [Google Scholar] [CrossRef]
- Shams, M.H.; Shahabi, M.; Khodayar, M.E. Stochastic Day-ahead Scheduling of Multiple Energy Carrier Microgrids with Demand Response. Energy 2018, 155, 326–338. [Google Scholar] [CrossRef]
- Chen, W.; Shao, Z.; Wakil, K.; Aljojo, N.; Samad, S.; Rezvani, A. An efficient day-ahead cost-based generation scheduling of a multi-supply microgrid using a modified krill herd algorithm. J. Clean. Prod. 2020, 272, 122364. [Google Scholar] [CrossRef]
- Han, S.; Yin, H.; Alsabbagh, A.; Ma, C. A flexible distributed approach to energy management of an isolated microgrid. In Proceedings of the 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 2063–2068. [Google Scholar]
- Kumar, K.P.; Saravanan, B. Day ahead scheduling of generation and storage in a microgrid considering demand Side management. J. Energy Storage 2019, 21, 78–86. [Google Scholar] [CrossRef]
- Ebrahimi, M.R.; Amjady, N. Adaptive robust optimization framework for day-ahead microgrid scheduling. Int. J. Electr. Power Energy Syst. 2019, 107, 213–223. [Google Scholar] [CrossRef]
- Shi, J.; Huang, W.; Tai, N.; Zhu, Q.; Liu, D. Strategy to smooth tie-line power of microgrid by considering group control of heat pumps. J. Eng. 2017, 2017, 2417–2422. [Google Scholar] [CrossRef]
- Yao, Y.; Zhang, P. Transactive control of air conditioning loads for mitigating microgrid tie-line power fluctuations. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Hosseini, S.E.; Najafi, M.; Akhavein, A.; Shahparasti, M. Day-Ahead Scheduling for Economic Dispatch of Combined Heat and Power with Uncertain Demand Response. IEEE Access 2022, 10, 42441–42458. [Google Scholar] [CrossRef]
- Shan, X.; Xue, F. A Day-Ahead Economic Dispatch Scheme for Transmission System with High Penetration of Renewable Energy. IEEE Access 2022, 10, 11159–11172. [Google Scholar] [CrossRef]
- Yang, L.; Li, H.; Yu, X.; Zhang, L.; Pang, B.; Yi, R.; Gai, P.; Xin, C. Multi-Objective Day-Ahead Optimal Scheduling of Isolated Microgrid Considering Flexibility. Power Syst. Technol. 2017, 5, 1432–1440. [Google Scholar]
- Yi, W.; Jiang, H.; Xing, P. Improved PSO-based energy management of Stand-Alone Micro-Grid under two-time scale. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2128–2133. [Google Scholar]
- Varghese, S.; Dalvi, S.; Narula, A.; Webster, M. The Impacts of Distinct Flexibility Enhancements on the Value and Dynamics of Natural Gas Power Plant Operations. IEEE Trans. Power Syst. 2021, 36, 5803–5813. [Google Scholar] [CrossRef]
- Li, H.; Lu, Z.; Qiao, Y.; Zhang, B.; Lin, Y. The Flexibility Test System for Studies of Variable Renewable Energy Resources. IEEE Trans. Power Syst. 2021, 36, 1526–1536. [Google Scholar] [CrossRef]
- Eltohamy, M.S.; Moteleb, M.S.A.; Talaat, H.; Mekhemer, S.F.; Omran, W. Technical investigation for power system flexibility. In Proceedings of the 2019 6th International Conference on Advanced Control Circuits and Systems (ACCS) & 2019 5th International Conference on New Paradigms in Electronics & information Technology (PEIT), Hurghada, Egypt, 17–20 November 2019; pp. 299–309. [Google Scholar]
- Song, C.; Chu, X. Optimal Scheduling of Flexibility Resources Incorporating Dynamic Line Rating. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Lu, W.; Hang, N. A Multiobjective Evaluation Method for Short-term Hydrothermal Scheduling. IEEJ Trans. Electr. Electron. Eng. 2017, 12, 31–37. [Google Scholar] [CrossRef]
- Elgammal, A.; El-Naggar, M. Energy management in smart grids for the integration of hybrid wind–PV–FC–battery renewable energy resources using multi-objective particle swarm optimisation (MOPSO). J. Eng. 2018, 11, 1806–1816. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, P.; Fang, H.; Zhou, Y. Multi-Objective Reactive Power Optimization Based on Improved Particle Swarm Optimization With ε-Greedy Strategy and Pareto Archive Algorithm. IEEE Access 2021, 9, 65650–65659. [Google Scholar] [CrossRef]
- Li, C.; Yang, J.; Xu, Y.; Wu, Y.; Wei, P. Classification of voltage sag disturbance sources using fuzzy comprehensive evaluation method. CIRED Open Access Proc. J. 2017, 2017, 544–548. [Google Scholar] [CrossRef] [Green Version]
- Sang, Y.; Zheng, Y. Reserve scheduling in the congested transmission network considering wind energy forecast errors. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 October 2021; Volume 1, pp. 1–6. [Google Scholar]
- Saaty, T.L.; Vargas, L.G. Models, Methods, Concepts & Applications of the Analytic Hierarchy Process. International 2017, 7, 9–172. [Google Scholar]
- Huang, X. Time-series analysis model based on data visualization and entropy weight method. In Proceedings of the 4th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 19–21 November 2021; pp. 501–503. [Google Scholar]
- Liu, W.; Li, H.; Zhang, H.; Xiao, Y. Expansion Planning of Transmission Grid Based on Coordination of Flexible Power Supply and Demand. Autom. Electr. Power Syst. 2018, 42, 56–63. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Supply Unit Type | Parameter Type | Parameter Value |
|---|---|---|
| Photovoltaic array | Power rating | 100 kW |
| Wind turbine | Power rating | 33 kW |
| Lead-acid battery | Rated capacity Range of SOC Maximum charge and discharge power | 100 kW·h 0.2–1 25 kW |
| Diesel generator | Power rating Maximum upward ramping rate Maximum downward ramping rate | 200 kW 120 kW/h 120 kW/h |
| Tie line | Maximum transmission power | 90 kW |
| Generation Unit Type | Fuel Cost (CNY·(kW·h)−1) | Operation Management Coefficient (CNY·(kW·h)−1) |
|---|---|---|
| Photovoltaic array | — | 0.0096 |
| Wind turbine | — | 0.0296 |
| Lead-acid battery | — | 0.0322 |
| Diesel generator | 0.81 | 0.0880 |
| Pollutant Type | CO2 | SO2 | |
|---|---|---|---|
| Handling Expense (CNY·kg−1) | 0.21 | 14.842 | |
| Pollutant emission coefficient (g·(kW·h)−1) | Photovoltaic power generation | 0 | 0 |
| Wind power generation | 0 | 0 | |
| Diesel power generation | 649 | 0.206 | |
| Type of Period | Period (h) | Purchase Price (CYN) |
|---|---|---|
| Peak period | 8:00–11:00 13:00–15:00 18:00–21:00 | 1.25 |
| Ordinary period | 6:00–8:00 11:00–13:00 15:00–18:00 21:00–22:00 | 0.80 |
| Valley period | 0:00–6:00 22:00–0:00 | 0.40 |
| Parameters and Units | Strategy A | Strategy B |
|---|---|---|
| Insufficient flexibility rate of the day-ahead scheme (IFR) (%) [15] | 46.21 | 14.74 |
| Flexibility sufficiency rate (FSR) (%) [28] | 4.17 | 50.00 |
| Average insufficiency of flexibility (AIF) (kW·h) [28] | 28.458 | 15.098 |
| Forecast operation cost (CNY) | 1503.96 | 1598.37 |
| Realized operation cost (CNY) | 1756.52 | 1794.48 |
| Forecast curtailment rate of renewable energy (%) | 0 | 6.96 |
| Realized curtailment rate of renewable energy (%) | 37.58 | 19.55 |
| Forecast power fluctuations on the tie-line (%) | 59.71 | 69.65 |
| Realized power fluctuations on the tie-line (%) | 60.18 | 69.70 |
| Deviation rate of forecast and realized power fluctuations on the tie-line (%) | 29.17 | 14.58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Huang, W.; Guo, C.; Zhang, D.; Xiang, C.; Yang, L.; Wang, Q. Multi-Objective Optimal Scheduling for Multi-Renewable Energy Power System Considering Flexibility Constraints. Processes 2022, 10, 1401. https://doi.org/10.3390/pr10071401
Yang L, Huang W, Guo C, Zhang D, Xiang C, Yang L, Wang Q. Multi-Objective Optimal Scheduling for Multi-Renewable Energy Power System Considering Flexibility Constraints. Processes. 2022; 10(7):1401. https://doi.org/10.3390/pr10071401
Chicago/Turabian StyleYang, Lei, Wei Huang, Cheng Guo, Dan Zhang, Chuan Xiang, Longjie Yang, and Qianggang Wang. 2022. "Multi-Objective Optimal Scheduling for Multi-Renewable Energy Power System Considering Flexibility Constraints" Processes 10, no. 7: 1401. https://doi.org/10.3390/pr10071401
APA StyleYang, L., Huang, W., Guo, C., Zhang, D., Xiang, C., Yang, L., & Wang, Q. (2022). Multi-Objective Optimal Scheduling for Multi-Renewable Energy Power System Considering Flexibility Constraints. Processes, 10(7), 1401. https://doi.org/10.3390/pr10071401