1. Introduction
With the promotion and popularization of new energy vehicles, in addition to power density and fault tolerance performance, the electromagnetic vibration noise of electric motors, which is closely related to the noise, vibration, and harshness (NVH) characteristics of electric vehicles, has also received more and more attention. Similar to the three-phase motor, the pole-slot coordination is an important factor affecting the electromagnetic vibration characteristics of the motor. Some of the original rules are in [
1], and numerous empirical rules have been developed in the ensuing decades. An exhaustive list of these laws can be found in Timar’s book [
2]. However, these results mainly focused on three-phase motors, without the consideration of the natural frequency and modal characteristics of the motor structure. Additionally, some of them are based on electromagnetic torque pulsation as the limiting condition, which may not be suitable for reducing audible magnetic noise [
3]. Due to the difference in the number of phases, the air-gap magnetic density and electromagnetic force harmonic of the five-phase squirrel cage induction motors (FSCIM) are various.
To design an FSCIM for driving, it is necessary to enhance NVH characteristics. In almost all induction machines, noise originates from aerodynamic, mechanical, and electromagnetic problems [
4,
5,
6]. Aerodynamic and mechanical problems, which mainly result from turbines and assembly errors, can be ignored in the design stage. However, electromagnetic vibration levels can directly affect the NVH characteristics and cause failures, such as bearing failure and insulation breakdown [
7]. Magnetic pull force [
8], torque ripple [
9], cogging torque [
9], and unbalanced magnetic force [
8] are the main electromagnetic sources of NVH characteristics. Improvement of the overall force characteristics is required for improving the NVH characteristics. Additionally, optimizing the individual force characteristics while improving the overall electromagnetic force characteristics is a better choice to improve the NVH characteristics. The electromagnetic vibration characteristics of the five-phase motors are similar to those of the three-phase motors. The pole-slot number scheme has a decisive effect on the magnetic noise [
10,
11,
12,
13]. Obviously, it is not suitable to directly apply the pole-slot matching of the three-phase motor to FSCIM.
A 40/30 slot, four poles, and an FSCIM are used to study the influence of saturation on the air-gap flux density waveform [
14]. Wang Dong et al. selected three five-phase motors with 60/38 slots to form a fifteen-phase induction motor, and analyzed the air-gap magnetic potential of the induction motor under non-sinusoidal power supply conditions [
15]. A comparative analysis of the operating characteristics between the three-phase and five-phase induction motors under the same structural size, that is, 30/44 slots and 2-poles induction motor, is discussed in [
16]. Pereira LA et al. analyzed the mathematical model of the five-phase induction motor, deduced the self-inductance and mutual inductance of the stator and rotor, and calculated the time and space harmonics of the air-gap flux density [
17,
18]. The effect of applying stator shifting to five-phase winding to suppress the effect of the slot harmonics by doubling the number of slots is investigated [
19]. Based on the measured sample data, a new radial vibration model is proposed, consisting of a vibration acceleration impulse model and a natural oscillation model [
20]. The vibration and noise levels in a permanent magnet synchronous motor with different slot-pole combinations are discussed, mainly through the FEM to establish the analytical model [
21]. An analytical model of the acoustic behavior of pulse-width modulation (PWM) controlled induction machines is applied to a three-phase fractional-slot winding machine. However, the acoustic radiation is simplified as a 2D cylindrical shell model [
22,
23]. Reference [
24] established the electromagnetic vibration and noise model of the three-phase induction motor based on the acoustic model of the infinitely long ring, and carried out the optimization study of the slot-number scheme, but did not consider the influence of the pole-pair-number and the axial modes of the stator frame in an acoustic radiator. Reference [
25] aimed at reducing the resonance noise of an evaporative cooling motor induced by an electromagnetic and two-phase flow based on the fluid-structure coupling theory. The subdomain method is used to optimize the noise, vibration, and harshness (NVH) characteristics of a permanent magnet synchronous motor. The predecessors mainly analyzed the operating characteristics and control strategies of the existing five-phase motor or those created by re-embedding the stator winding of the three-phase motor. However, there rarely are selection basis and parameter optimization processes of pole-slot number schemes for five-phase induction motors.
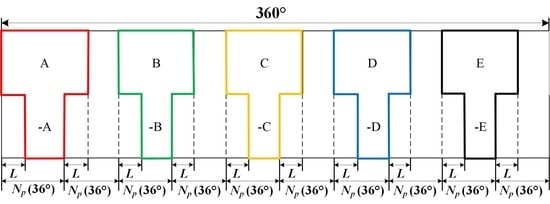
This paper aims at the optimization design of the electromagnetic noise of an FSCIM, as shown in
Figure 1. Firstly, the slot-number assignment of the five-phase regular-size phase-belt winding is detailed via the slot-number phase diagram (SNPD) [
26,
27]. Then, the expression of stator magnetomotive force (MMF) can be given by the superposition of a single conductor or a coil. Next, an improved analytical model of the induction machine’s electromagnetic force-vibration-acoustic radiation is proposed. Based on these mathematical models, the influence of time and space harmonics of electromagnetic forces on vibro-noise will be considered as a whole. The accuracy of this model for predicting magnetic noise phenomena is validated by a prototype at different stages (natural frequency, vibration, and sound power level) by numerical methods and tests. Finally, focused on two different low electromagnetic noise targets, the magnetic noise level of every pole-slot number scheme of five-phase induction motors with less than four pole pairs is simulated. Taking a 4 kW FSCIM with an outer diameter of 175 mm as a prototype allows for recommending schemes for low-noise slot matching.
4. Conclusions
Aiming at the relationship of the FSCIM between the electromagnetic noise characteristics and the pole-slot numbers match, this paper deduces and improves the radial electromagnetic force-vibration-noise radiation model based on the analysis of the five-phase symmetrical windings and the acoustic model in finite cylindrical shells. This model can comprehensively consider the natural frequency of the system composed of the three parts of the stator superimposed, as well as the acoustic radiation characteristics of the circumferential and axial modes of the finite cylindrical shell. Therefore, the results are more in line with the real situation of the electromagnetic noise of the motor. The accuracy of the improved model was verified by simulation and experiments at multiple stages under the conditions of a given power, supply frequency, and slot type. The noise prediction of as many slots as possible was carried out, and some quiet pole-slots for the FSCIM test were selected by different noise optimization objectives. The results reflect the effects and rules of pole-slot matching for noise reduction in five-phase induction motors.
Although the matching results in this paper have some limitations, which are that the results only reflect the effect of pole-slot numbers without the consideration of the slot geometries and PWM harmonics. However, they can still be applied to motors with similar natural frequencies, and the analytical noise prediction model can be applied to FSCIM with other requirements. To avoid severe resonance and noise caused by electromagnetic force waves, the model is still beneficial for the selection of pole-slot numbers during motor initial design.
Future works should focus on the multi-objective optimization algorithms for low-noise optimization design, comprehensively considering the pole-slot scheme, and slot geometries.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}