
Factors to Influence the Trajectory Control Ability of a Reverse Push-the-Bit Rotary Steerable System



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Realization of Mechanism and Principle of the New Rotary Steerable Method Based on a “Labor-Saving Lever”
3. Selection of the Analysis Method for Trajectory Control Capability of the New Rotary Steerable System
- (1)
- Each unit of the BHA can be elastically deformed.
- (2)
- The bit is packed hole one, and there is no coupling between the bit and the formation.
- (3)
- The centralizer is approximately packed hole one with a center slightly lower than the bit center.
- (4)
- The drill collar above the tangent point of the drilling tool lies flat on the down hole wall.
- (5)
- The three contact points of the paranoid mechanism, the centralizer and the bit with the borehole wall are rigid.
- (6)
- The borehole wall is rigid body, and the borehole size does not change with time.
- (7)
- The centralizer, bit, and paranoid mechanism are in point contact with the borehole wall.
- Building components
- Set material and section properties
- Assembly component
- Apply loads and define boundaries
- Create analysis steps and meshes
- Submit a task
- Visual analysis
- Find the pushing force of the bit
- α—drilling trend angle, rad;
- vx—the component of the actual drilling direction of the bit along the x-axis, m/s2;
- vy—The component of the actual drilling direction of the bit along the y-axis direction, m/s2;
- vz—The component of the actual drilling direction of the bit along the z-axis direction, m/s2.
4. Influence Law of Different Factors on the Trajectory Control Ability of the New Rotary Steerable System
4.1. Influence of a Flexible Segment’s Length on Trajectory Control Ability
- With the increase in the length of the flexible segment, the drilling trend angle, the pushing force on the bit, and the rotation angle of the bit show a trend of first increasing and then decreasing. As the rotation angle of the bit is very small and the change value is not obvious, it can be considered that the value remains basically unchanged.
- There is an optimal length of a flexible segment, which varies slightly with different well inclination angles. That is, with the increase in well inclination angle, the optimal length is slightly shortened. When the well inclination angle is 0°, 45°, and 90°, respectively, the length of the flexible segment is 1.5 m, 1.5 m, and 1 m, accordingly.
- The well inclination has a significant effect on the pushing force applied by the new rotary steerable drilling system to the bit. With the increase in the inclination angle, the pushing force on the bit corresponding to the optimal length of the flexible segment shows an increasing trend, and the increase is significant.
- The well inclination has a significant effect on the drilling trend angle of the new rotary steerable drilling system. As the well inclination increases, the drilling trend angle shows an increasing trend.
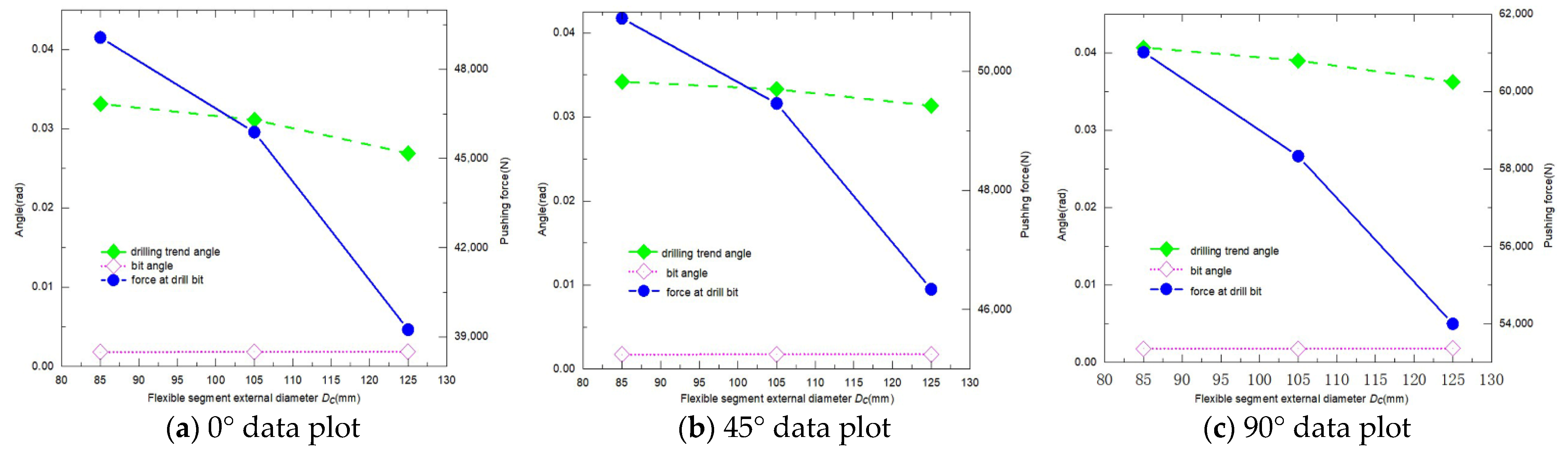
4.2. The Influence of the Outer Diameter of the Flexible Segment on Trajectory Control Ability
- The outer diameter of the flexible segment has a greater impact on trajectory control ability. The smaller the outer diameter of the flexible segment, the greater the pushing force on the bit, the larger the bit’s rotation angle and the drilling trend angle, that is, the stronger the trajectory control ability. However, due to the consideration of the down hole safety of the flexible segment, whose outer diameter should not be too small, the optimal outer diameter is 105 mm, according to the existing data.
- Under the premise that the outer diameter and length of the flexible segment are constant, the well inclination has a significant influence on the pushing force exerted by the new rotary steerable drilling system on the bit. With the increase in the well inclination, the pushing force on the bit shows an increasing trend and increases significantly.
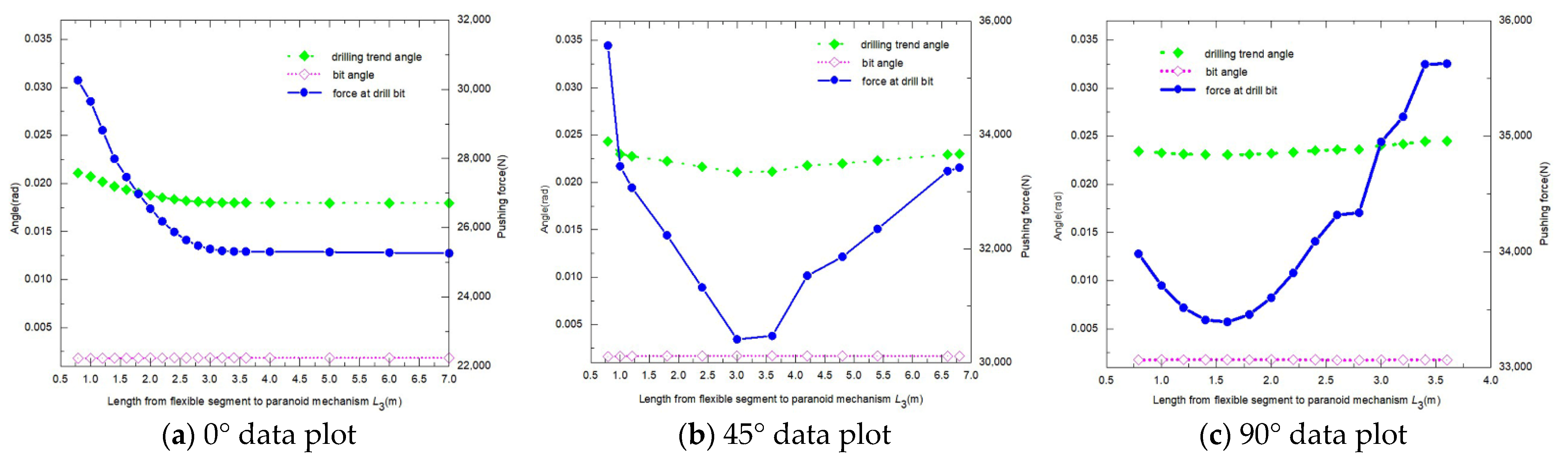
4.3. Influence of the Distance from the Flexible Segment to the Paranoid Mechanism on Trajectory Control Ability
- With the increase in the distance between the flexible segment and the paranoid mechanism, the change in the bit’s rotation angle is not obvious, and it can be considered that the value is basically unchanged.
- With the increase in the distance from the flexible segment to the paranoid mechanism, the drilling trend angle and the pushing force on the bit have the same trend. At 0° inclination, both of them show a decreasing trend, while at 45° inclination and 90° inclination, both of them show a trend of first decreasing and then increasing.
- In a well bore with an inclination angle, there is a worse distance between the flexible segment and the paranoid structure, which can weaken the trajectory control ability significantly.
- The worse distance from the flexible segment to the paranoid mechanism tends to decrease as the well inclination increases.
4.4. Influence of the Distance from the Paranoid Mechanism to the Centralizer on Trajectory Control Ability
- With the increase in the distance between the paranoid mechanism and the centralizer, the change in the bit’s rotation angle is not obvious, and it can be considered that the value is basically unchanged.
- With the increase in the distance from the paranoid mechanism to the centralizer, the drilling trend angle and the pushing force on the bit have the same trend, which is to increase first and then decrease overall.
- There is an optimal distance between the paranoid mechanism and the centralizer, which can strengthen the trajectory control ability significantly.
- Within the set well bore, the optimal distrance from the paranoid structure to the centralizer is 2.73 m.
4.5. The Optimal Structure Scheme of the New Rotary Steerable System and the Comparison with the Existing Drilling System
- Under the premise of the same pushing force output from the paranoid mechanism, the force obtained by the bit of the new rotary steerable system is greatly improved compared with that of the conventional rotary steerable system, and the improvement range increases with the increase in the well inclination. In the case of 0°, 45°, and 90°, the pushing force on the bit is increased by 3.7 times, 4 times, and 5.3 times respectively.
- The inclination angle of the bit in the new rotary steerable system is a positive value, that is, it is in the same direction as the pushing force obtained by the bit, whose function is to increase the inclination. While the inclination angle of the bit in the conventional rotary steerable system is a negative value, that is, it is opposite to the direction of the pushing force obtained by the bit, whose effect is to decrease the inclination.
- Under the premise that the paranoid mechanism outputs the same pushing force, the drilling trend angle of the new rotary steerable system is greatly improved compared with the conventional system, and the improvement range increases with the increase in the well inclination. In the case of 0°, 45°, and 90°, the drilling trend angle is increased by 5.5 times, 4.7 times, and 6.5 times, respectively.
- The pushing force obtained by the bit in the new rotary steerable system is in the same direction as the inclination angle of the bit, and the two control the borehole trajectory together. Meanwhile the pushing force on the bit in the conventional rotary steerable system is opposite to the direction of the inclination angle of the bit, that is, the trajectory control process and the two effects are contradictory. The performance of the trajectory control depends on who is dominant.
- The direct factor for the change in the borehole trajectory is the bit. Whether the bit can cut the sidewall is the fundamental factor for the trajectory change in push-the-bit rotary steerable drilling. Therefore, no matter which steerable mode, it is necessary to carry out research on matching bits to optimize the effect [20].
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qilong, X.; Qingshan, D.; Leilei, H. The latest progress and development trend of rotary steering drilling technology. China Pet. Mach. 2010, 41, 1–6. [Google Scholar]
- Bayliss, M.T.; Panchal, N.; Whidborne, J.F. Rotary steerable directional drilling stick/slip mitigation control. IFAC Proc. Vol. 2012, 45, 66–71. [Google Scholar] [CrossRef]
- Xinjun, G.; Jing, L. Research on application of steering drilling technologies in shale gas development. Procedia Eng. 2014, 73, 269–275. [Google Scholar] [CrossRef]
- Staff, J. Hybrid rotary steerable system delivers higher build rates and smoother holes. J. Pet. Technol. 2013, 65, 32–34. [Google Scholar] [CrossRef]
- Matheus, J.; Ignova, M.; Hornblower, P. A hybrid approach to closed-loop directional drilling control using rotary steerable systems. In Proceedings of the SPE Latin America and Caribbean Petroleum Engineering Conference, Maracaibo, Venezuela, 21–23 May 2014; OnePetro: Richardson, TX, USA, 2014. [Google Scholar]
- Chunxu, Y.; Ruihe, W.; Laiju, H. A dynamic evaluation method for safe operation of the bottom hole assembly with bit-push rotary steering drilling system. Mech. Sci. 2020, 44, 64–70. [Google Scholar]
- Xiong, J.; Wen, J.; Rong, J. New progress in research on rotational oriented drilling technology. Nat. Gas Ind. 2010, 30, 87–90. [Google Scholar]
- Zhipeng, C.; Xing, L.; Gaocheng, W.; Yajun, J.; Jiehui, Z.; Zhaofeng, L. Application of rotary geosteering technology in horizontal wells and its implication: A case study of the zhaotong shale gas demonstration area of Yunnan. Nat. Gas Ind. 2015, 35, 64–70. [Google Scholar]
- Wei, J.; Shiquan, J.; Limin, S. Research on rotary navigation drilling tools and its application. Oil Drill. Prod. Technol. 2008, 30, 21–24. [Google Scholar]
- Tetsuo, Y.; Cargill, E.J.; Gaynor, T.M.; Hardin, J.; Hay, R.T.; Akio, I.; Kiyosawa, Y. Robotic controlled drilling: A new rotary steerable drilling system for the oil and gas industry. In Proceedings of the IADC/SPE Drilling Conference, Dallas, TX, USA, 26–28 February 2002. [Google Scholar]
- Flatern, R.V. Rotary steerables ready for the mainstream. Offshore Eng. 2003, 28, 32–36. [Google Scholar]
- Zhirui, W.; Junliang, W. Development of rotary steering technology in foreign countries and its status quo in china. Drill. Prod. Technol. 2018, 41, 5. [Google Scholar]
- Yucai, S.; Haifang, S.; Bujiang, Y.; Zhichuan, G.; Heng, W.; Zaiqing, M. A design method to prevent self-locking of a static push-the-bit rotary steerable drilling tool. J. China Univ. Pet. (Ed. Nat. Sci.) 2017, 41, 7. [Google Scholar]
- Jinzhou, Z.; Mingxin, S. Analysis of working mode of rotary steerable drilling system. China Pet. Mach. 2004, 32, 3. [Google Scholar]
- Qi, L.; Chun-wen, D.; Shao-huai, Z. Well trajectory control theory for rotary steering drilling system and applied techniques. Acta Pet. Sin. 2005, 26, 5. [Google Scholar]
- Shihong, X.; Zheng, L. Development status and prospect of rotary guided drilling technology. China Pet. Mach. 2006, 34, 5. [Google Scholar]
- Jing, L.; Gansheng, Y.; Tao, L. Steering principles of rotary steerable drilling systems in china and abroad. Explor. Eng. (Rock Soil Drill. Tunn.) 2012, 39, 53–58. [Google Scholar]
- Yongwang, L. An Efficient Intelligent Steering Drilling System and Drilling Method. 2020. [Google Scholar]
- Yucai, S.; Zhichuan, G.; Hongshan, Z.; Genlu, H. A new method for build-up rate prediction of bottom-hole assembly in well drilling. J. China Univ. Pet. (Ed. Nat. Sci.) 2015, 41, 85–89. [Google Scholar]
- Yongwang, L.; Yong, H.; Deyong, Z.; Zhichuan, G.; Yuca, S. A High Build Slope Bit Suitable for Push against Rotary Steering Drilling Technology. 2021. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Qin, X.; Jia, J.; Li, G. Factors to Influence the Trajectory Control Ability of a Reverse Push-the-Bit Rotary Steerable System. Processes 2022, 10, 1621. https://doi.org/10.3390/pr10081621
Liu Y, Qin X, Jia J, Li G. Factors to Influence the Trajectory Control Ability of a Reverse Push-the-Bit Rotary Steerable System. Processes. 2022; 10(8):1621. https://doi.org/10.3390/pr10081621
Chicago/Turabian StyleLiu, Yongwang, Xiaobing Qin, Jianbo Jia, and Guoliang Li. 2022. "Factors to Influence the Trajectory Control Ability of a Reverse Push-the-Bit Rotary Steerable System" Processes 10, no. 8: 1621. https://doi.org/10.3390/pr10081621
APA StyleLiu, Y., Qin, X., Jia, J., & Li, G. (2022). Factors to Influence the Trajectory Control Ability of a Reverse Push-the-Bit Rotary Steerable System. Processes, 10(8), 1621. https://doi.org/10.3390/pr10081621