
Study on Screening Parameter Optimization of Wet Sand and Gravel Particles Using the GWO-SVR Algorithm

 ,
, 
Abstract
:1. Introduction
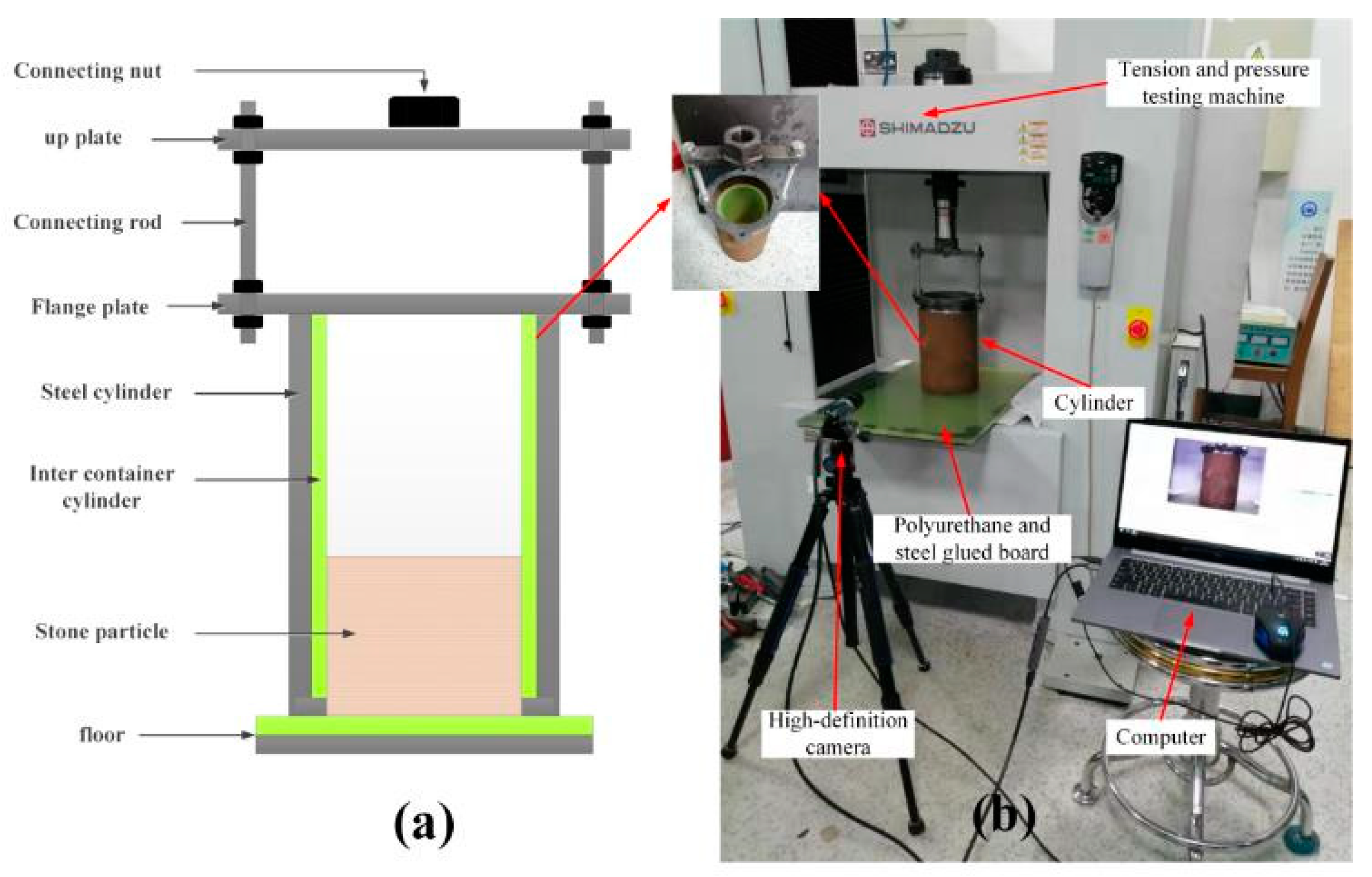
2. Simulation of the Screening Process
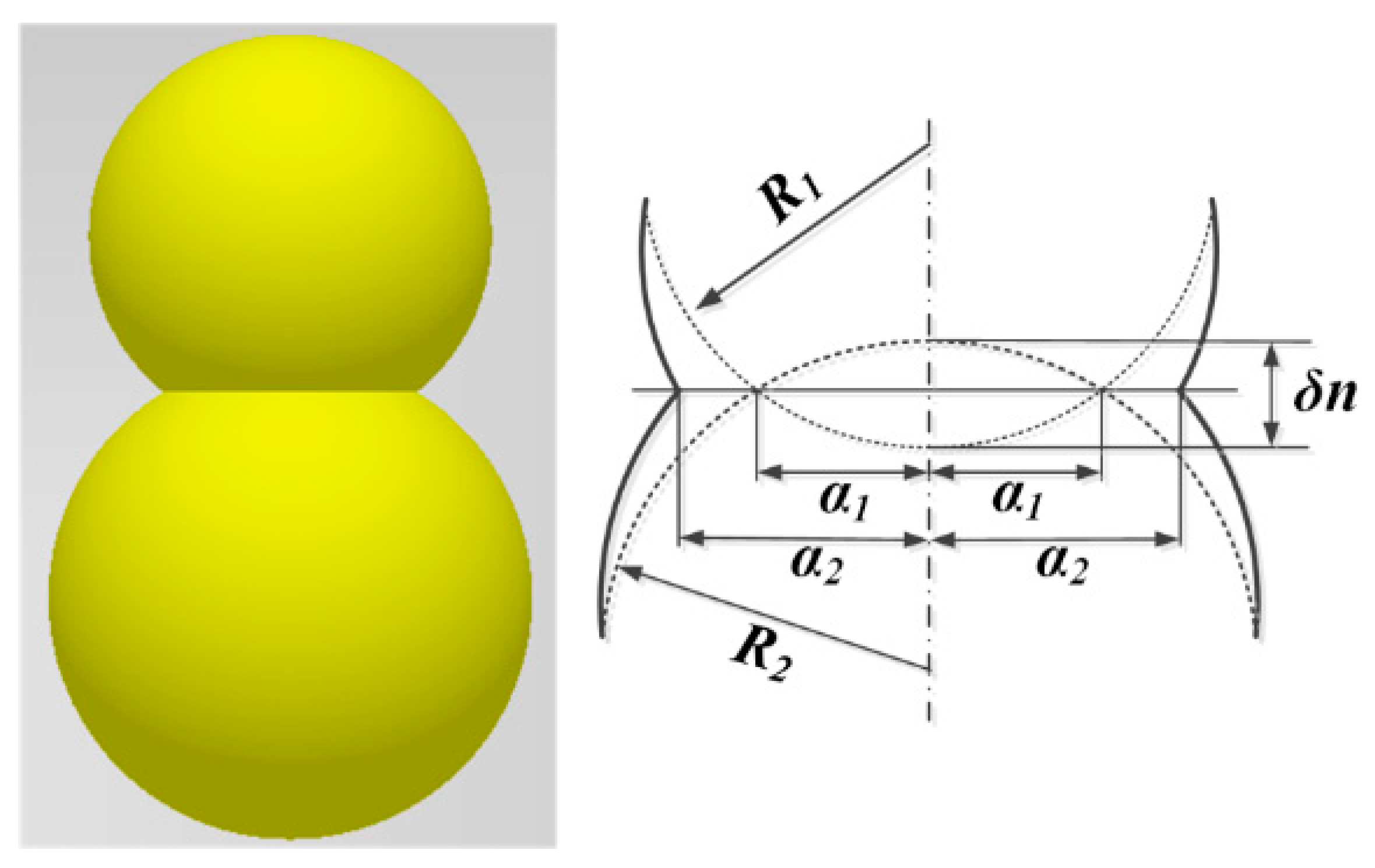
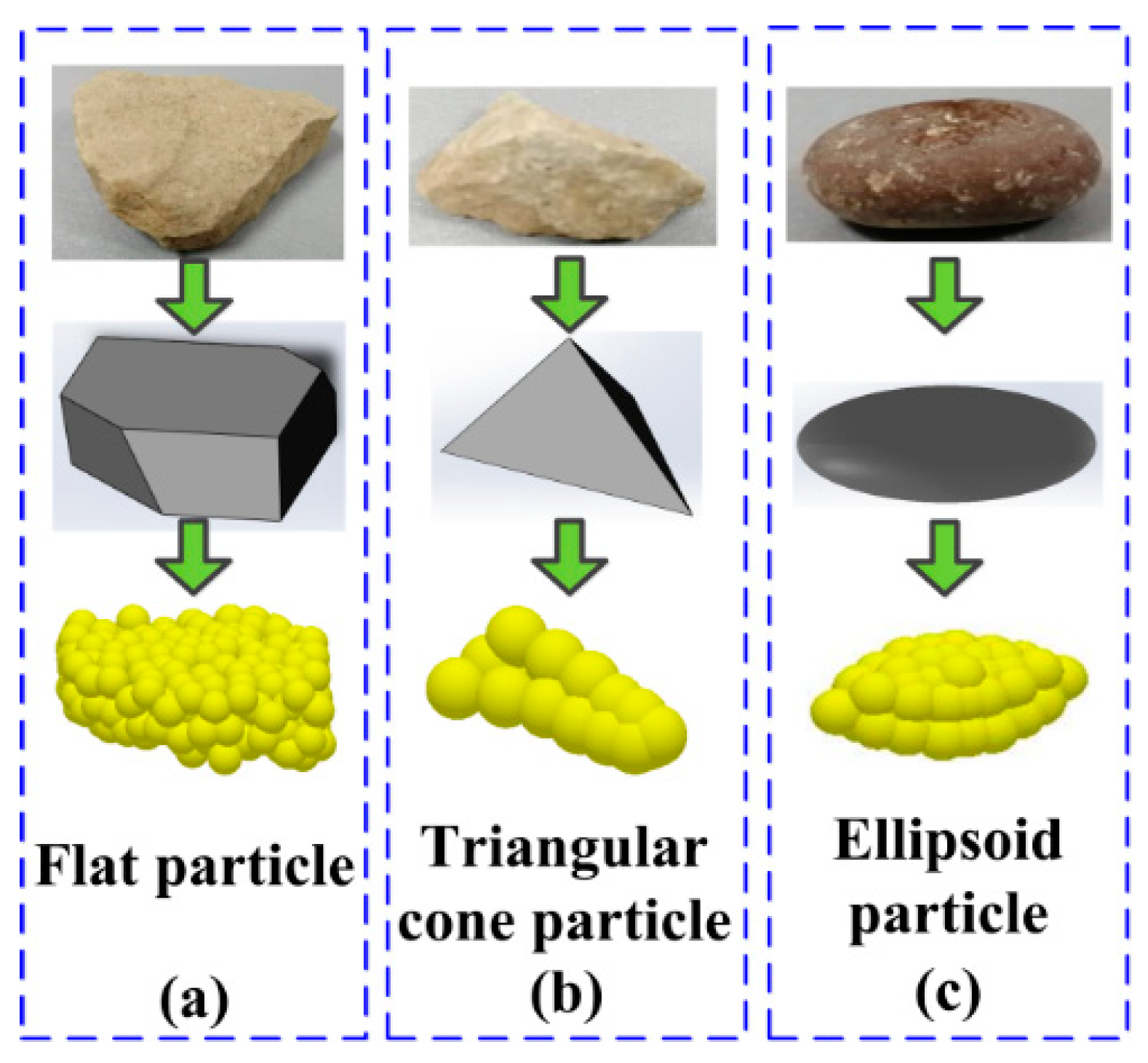
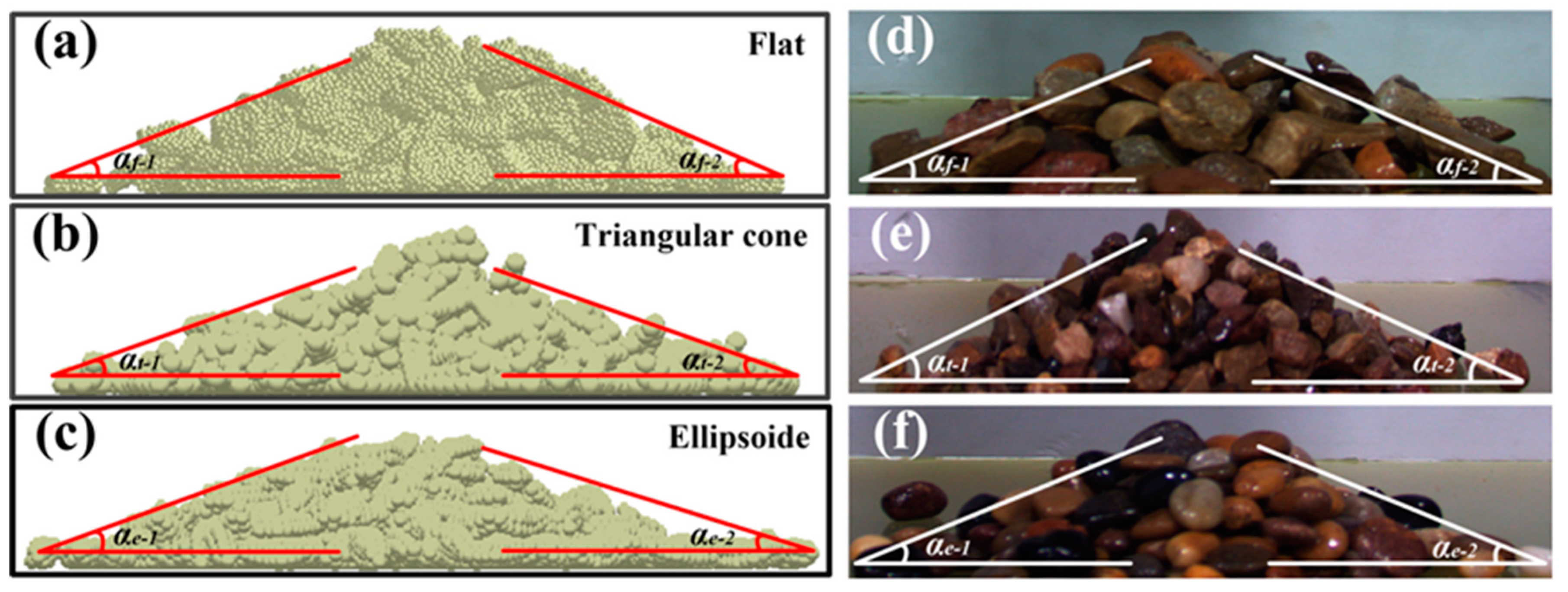
2.1. Discrete Element Modeling of Wet Sand and Gravel Particles
2.2. Screening Simulation Model
2.3. Screening Performance Index: Screening Efficiency and Time
3. Prediction of the Screening Performance
3.1. Support Vector Machine
3.2. The Grey Wolf Optimizer
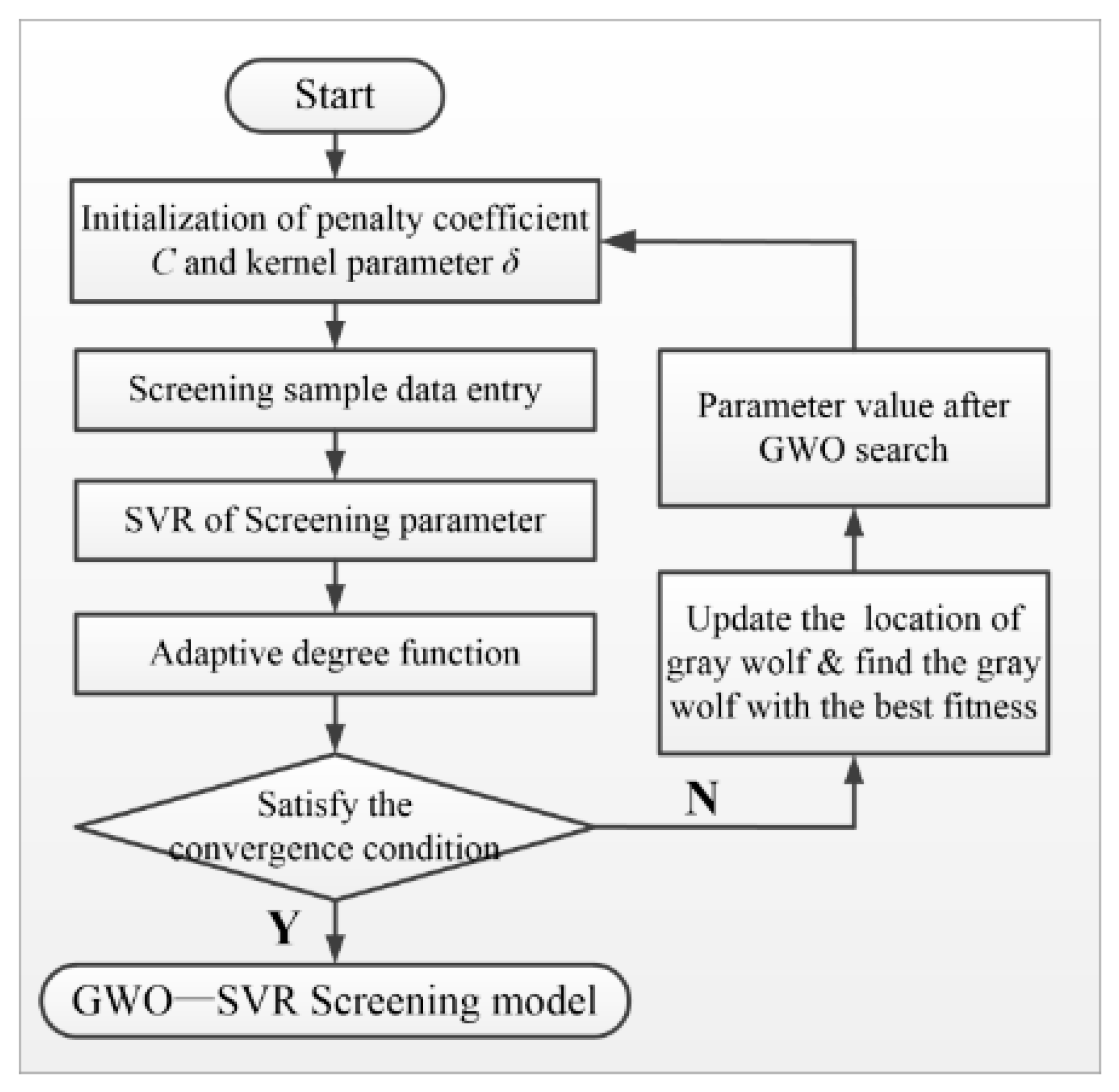
3.3. Construction of the Screening Parameter Prediction Model
- (i)
- The first step is to initialize the parameters in GWO and set the initial values of the penalty coefficient C and kernel function δ. The initial position of each wolf in population is determined so that the wolves with the best fitness can be selected more easily.
- (ii)
- After calculating the training value and test value of each wolf in the training sample and test sample, the relative error value is then defined as the fitness function.
- (iii)
- After comparing the fitness function value for the current wolf with the best wolf, the position of the current wolf is updated. Meanwhile, the synergy coefficient vector A and C are updated to help to find the position of the best wolf.
- (iv)
- If the set convergence condition is not satisfied when the gray wolf algorithm is at the maximum number of iterations, the process will return to the second step for parameter re-optimization until the parameters that meet the convergence conditions are selected.
- Ye-train and Yt-train are the training values of screening efficiency and screening time, respectively.
- Ye and Yt are the actual values of the training samples for screening efficiency and screening time, respectively.
- Ye-test and Yt-test are the predicted values of the test samples for screening efficiency and screening time, respectively.
- Ye-t and Yt-t are the actual values of test samples for screening efficiency and screening time, respectively.
- Ne-train and Nt-train are the number of training samples for screening efficiency and screening time, respectively.
- Ne-test and Nt-test are the number of test samples for screening efficiency and screening time, respectively.
3.4. Orthogonal Experimental Table Design
3.5. Significance Analysis for the Screening Parameters
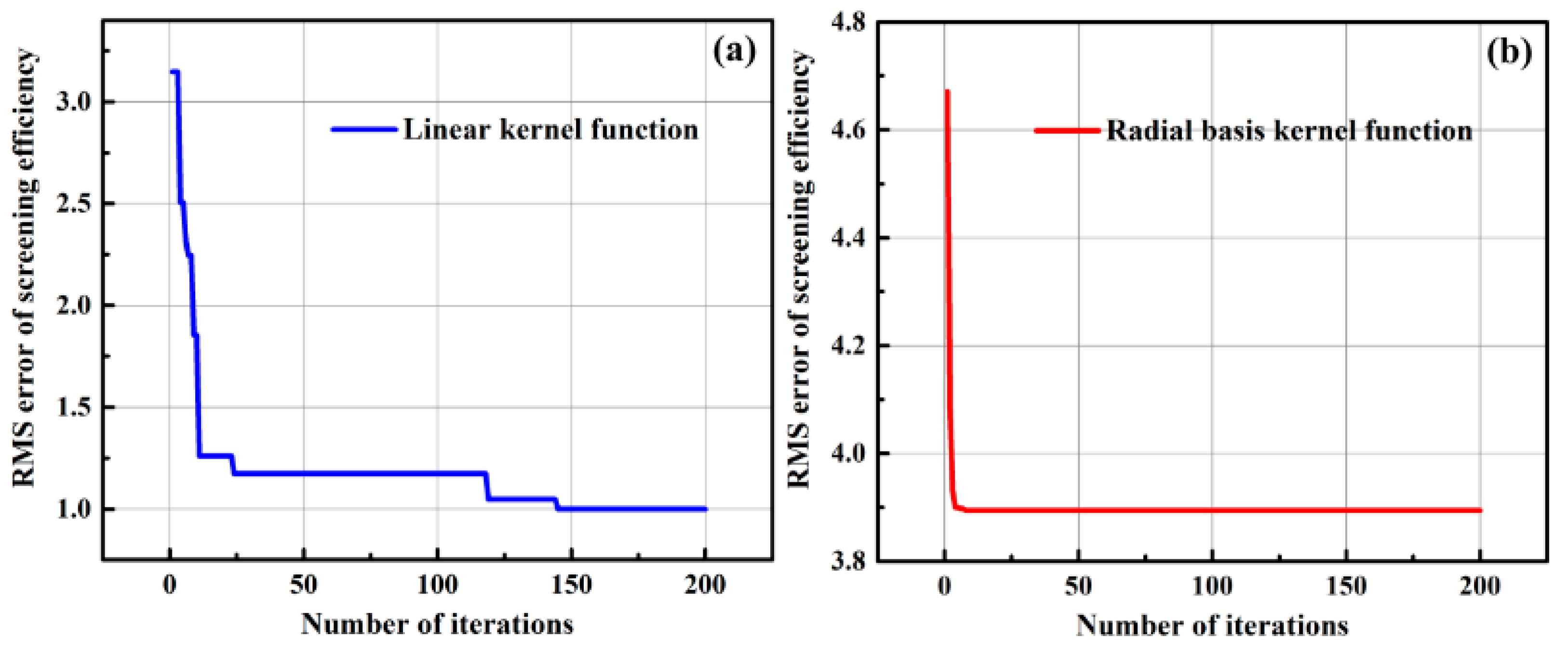
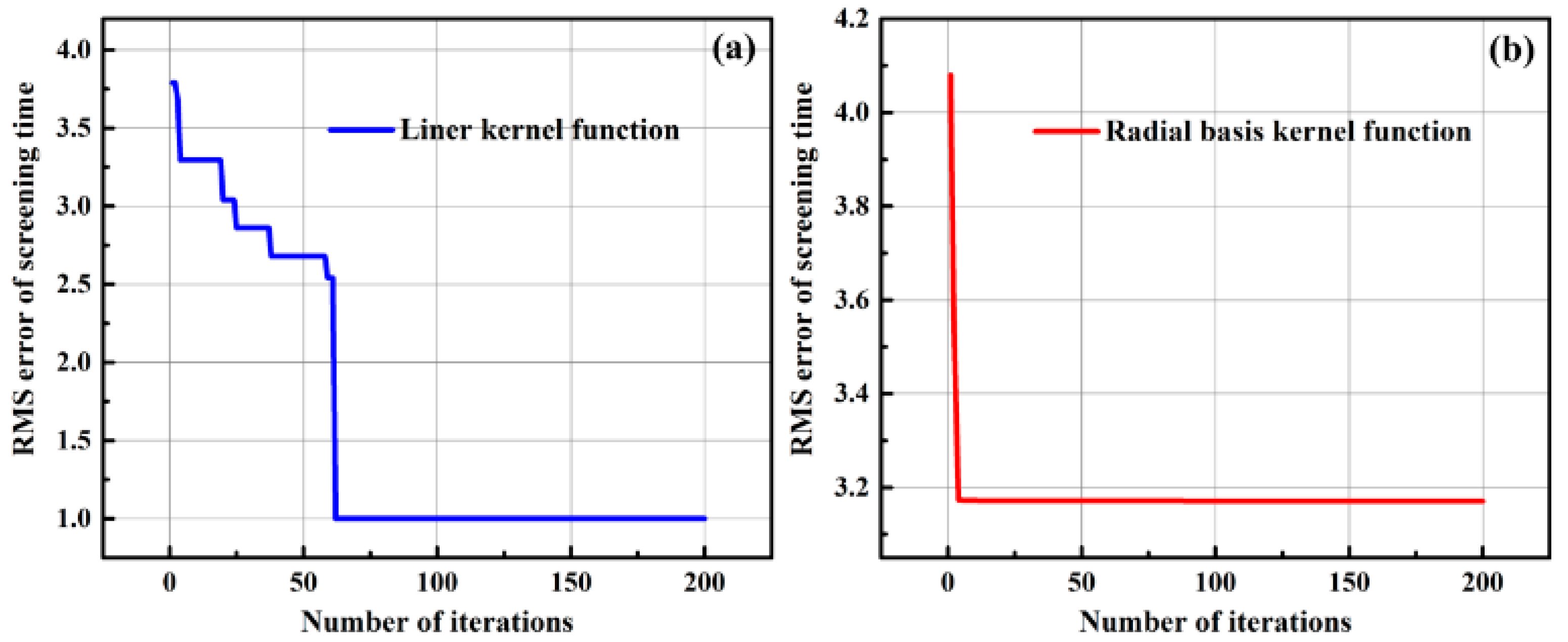
3.6. Selection of the Kernel Function
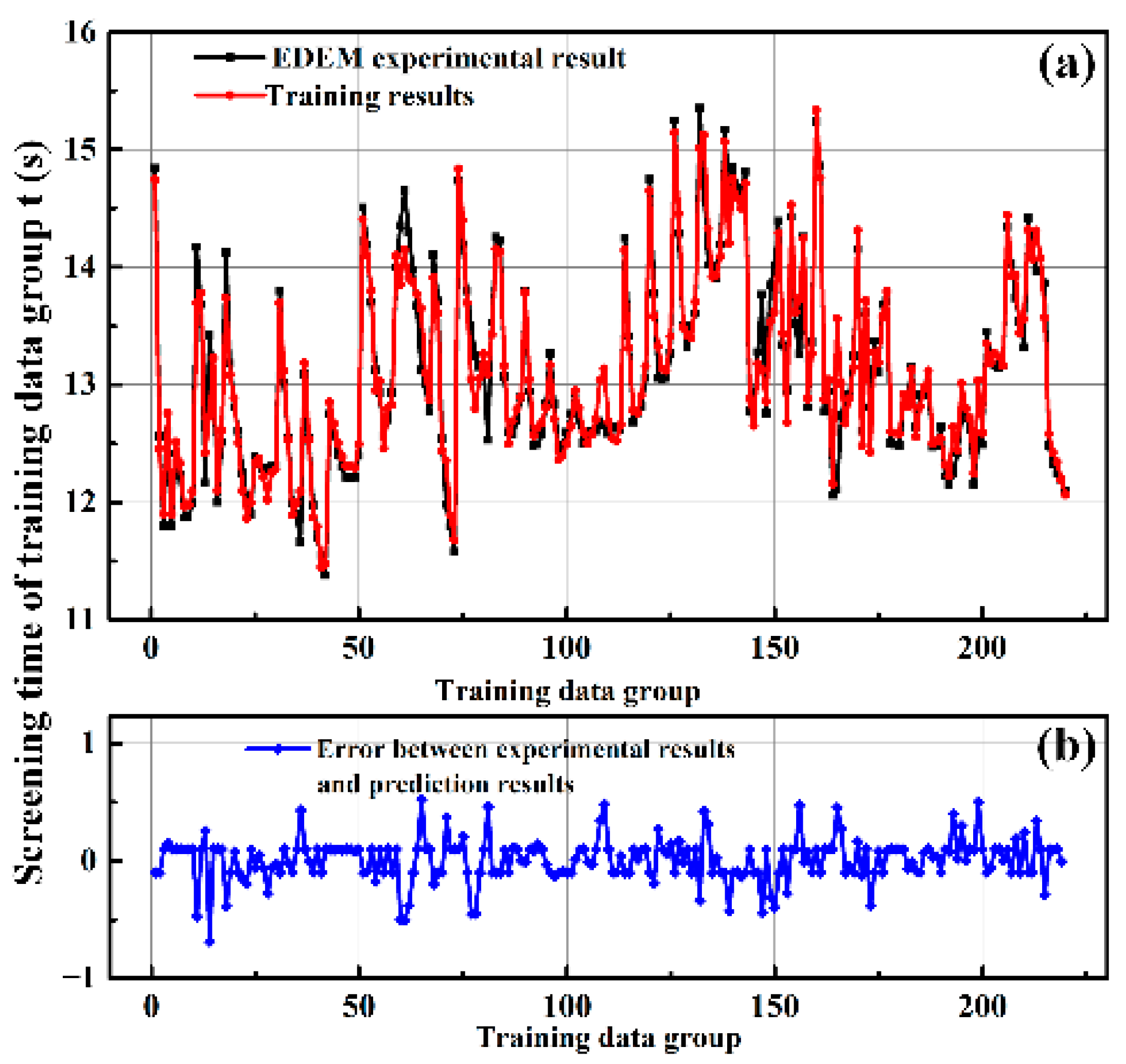
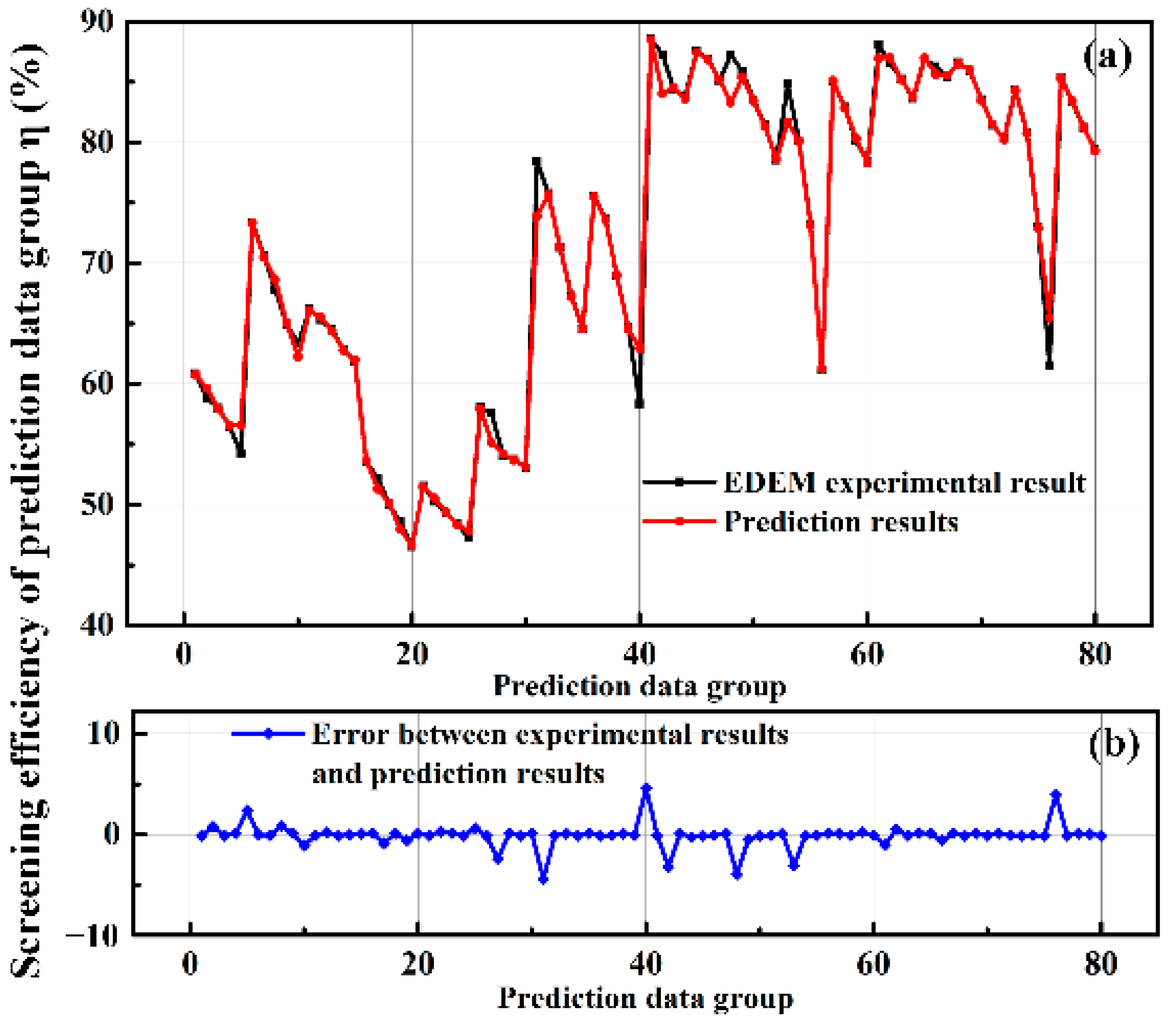
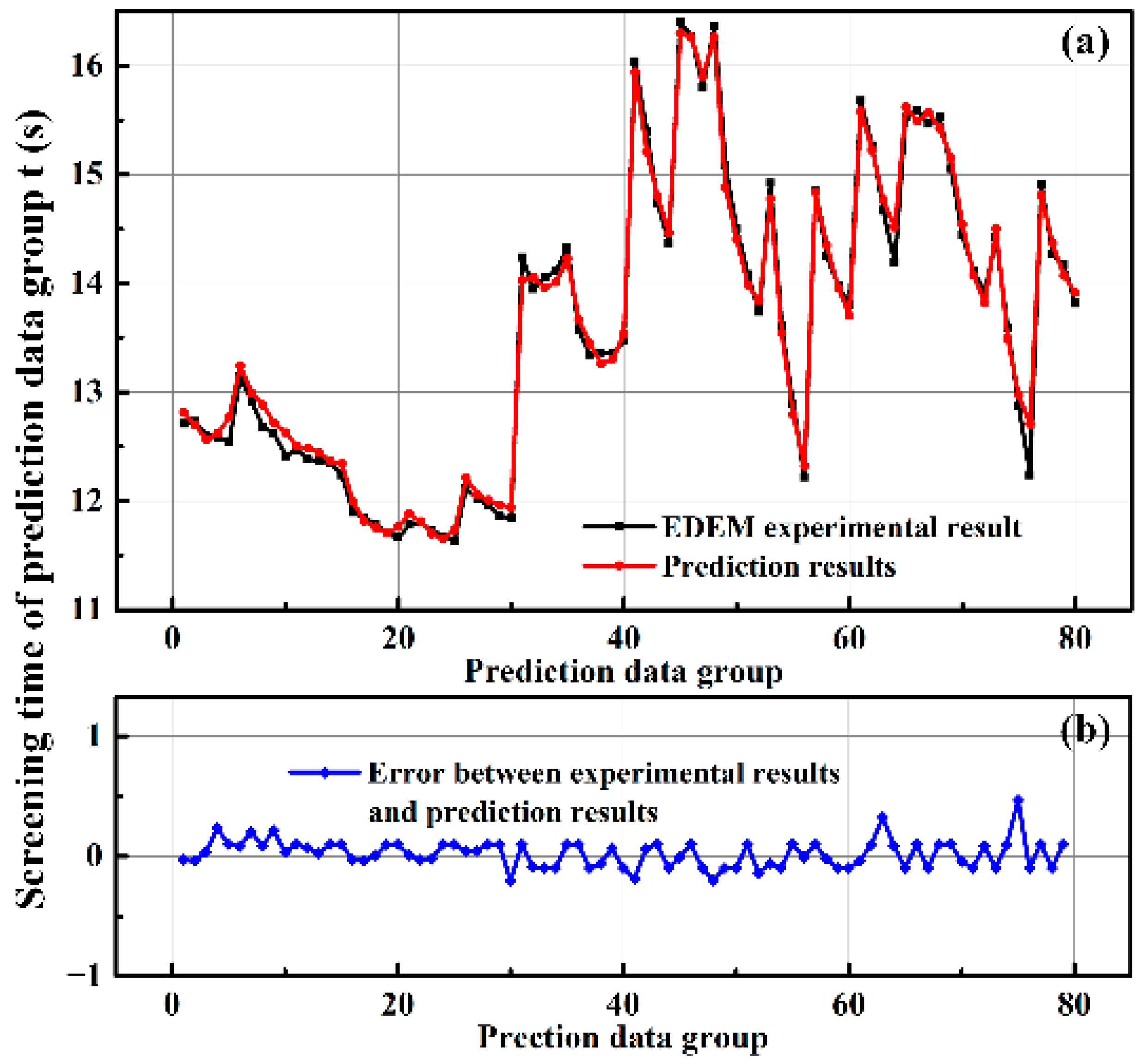
3.7. Prediction Accuracy of the Screening Model
4. Optimization of the Screening Performance
4.1. Construction of the Screening Parameter Optimization Model
4.2. Optimization Process and Results of the Screening Parameters
4.3. Verification of the Optimization Results
5. Conclusions
- (1)
- The discrete element model of wet sand and gravel particle screening was established first. The important factors affecting the screening process were obtained using an orthogonal experiment and range analysis. The results show that the amplitude, the screen surface inclination, and the vibration frequency are significant factors affecting screening efficiency and screening time.
- (2)
- Then, the screening parameter model for screening efficiency and screening time based on the GWO-SVR algorithm was established. The learning and prediction ability of the screening parameter model is improved with the Gaussian kernel function. By comparing the prediction values and error in the training group and prediction group, it can be found that the GWO-SVR screening model has excellent learning and prediction ability for screening efficiency and screening time data. The error is within the acceptable range, which indicates the reliability of the GWO-SVR screening model.
- (3)
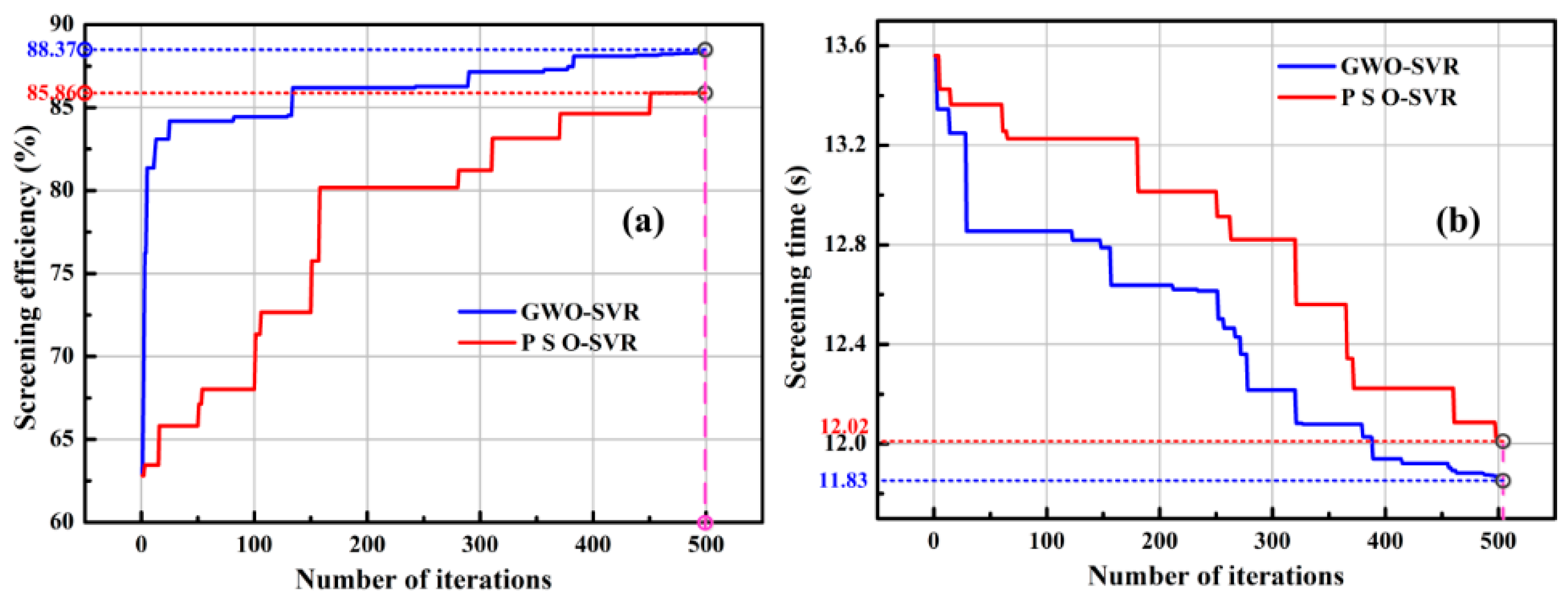
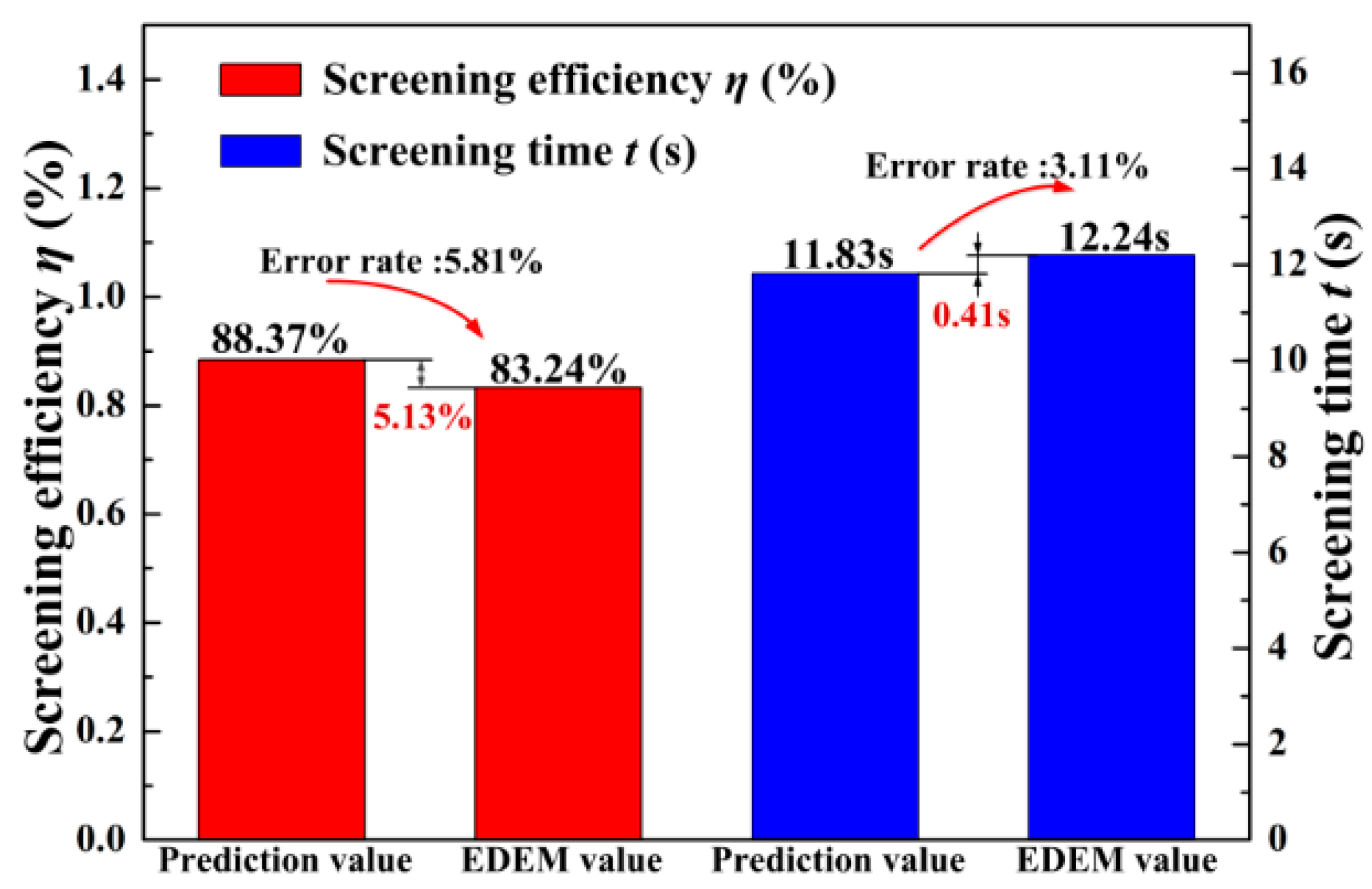
- Furthermore, the optimal screening parameter model was constructed with the GWO-SVR algorithm, and the screening parameters with optimal screening efficiency and time were obtained. The maximum screening efficiency is 83.24%, while the minimum screening time is 12.24 s. Meanwhile, comparing the GWO-SVR algorithm with the PSO-SVR algorithm, it is found that the screening efficiency and time of the GWO-SVR model are superior to that of the PSO-SVR model in terms of both convergence speed and optimization results.
- (4)
- Moreover, the screening parameters were used as input in EDEM to calculate the corresponding screening efficiency and screening time. We found that the calculated values are very close to the predicted values using the GWO-SVR algorithm. The above verification results prove the effectiveness and reliability of the optimization model.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pontee, N.I.; Pye, K.; Blott, S.J. Morphodynamic behaviour and sedimentary variation of mixed sand and gravel beaches, Suffolk, UK. J. Coast. Res. 2009, 20, 256–276. [Google Scholar] [CrossRef]
- Abdullahi, S.; Ismail, A.F.; Samat, S. Radiological characterization of building materials used in Malaysia and assessment of external and internal doses. Nucl. Sci. Tech. 2019, 30, 15. [Google Scholar] [CrossRef]
- Chen, J.J.; Cai, X.; Lale, E.; Yang, J.; Cusatis, G. Centrifuge modeling testing and multiscale analysis of cemented sand and gravel (CSG) dams. Constr. Build. Mater. 2019, 223, 605–615. [Google Scholar] [CrossRef]
- Volland, S.; Broetz, J. Lightweight aggregates produced from sand sludge and zeolitic rocks. Constr. Build. Mater. 2015, 85, 22–29. [Google Scholar] [CrossRef]
- Zhang, W.J.; Li, Y.F.; Tang, J. A novel wastewater cleaning system for the stone-crushing and sand-making process. Int. J. Min. Sci. Technol. 2012, 22, 745–748. [Google Scholar] [CrossRef]
- Dong, H.L.; Liu, C.S.; Zhao, Y.M.; Zhao, L.L. Influence of vibration mode on the screening process. Int. J. Min. Sci. Technol. 2013, 23, 95–98. [Google Scholar] [CrossRef]
- Zhang, H.; Challa, R.S.; Bai, B.J.; Tang, X.F.; Wang, J.L. Using Screening Test Results to Predict the Effective Viscosity of Swollen Superabsorbent Polymer Particles Extrusion through an Open Fracture. Ind. Eng. Chem. Res. 2010, 49, 12284–12293. [Google Scholar] [CrossRef]
- Patwa, A.; Ambrose, R.P.K.; Casada, M.E. Discrete element method as an approach to model the wheat milling process. Powder Technol. 2016, 302, 350–356. [Google Scholar] [CrossRef]
- Xia, H.; Tong, X.; Li, Z.; Wu, X. DEM-FEM coupling simulations of the interactions between particles and screen surface of vibrating screen. Int. J. Min. Miner. Eng. 2017, 8, 250–263. [Google Scholar] [CrossRef]
- Powell, M.S.; Weerasekara, N.S.; Cole, S.; Laroche, R.D.; Favier, J. DEM modeling of liner evolution and its influence on grinding rate in ball mills. Miner. Eng. 2011, 24, 341–351. [Google Scholar] [CrossRef]
- Lohse, R.; Palzer, U. Drag Model for Coupled CFD-DEM Simulations of Non-Spherical Particles; Springer: Berlin/Heidelberg, Germany, 2019; pp. 121–131. [Google Scholar]
- Dong, K.J.; Yu, A.B.; Brake, I. DEM simulation of particle flow on a multi-deck banana screen. Miner. Eng. 2009, 22, 910–920. [Google Scholar] [CrossRef]
- Li, Z.F.; Tong, X.; Xia, H.H.; Yu, L.J. A study of particle looseness in screening process of a linear vibrating screen. J. Vibroeng. 2016, 18, 671–681. [Google Scholar] [CrossRef]
- Zhao, L.L.; Zhao, Y.M.; Bao, C.Y.; Hou, Q.F.; Yu, A.B. Optimisation of a circularly vibrating screen based on DEM simulation and Taguchi orthogonal experimental design. Powder Technol. 2017, 310, 307–317. [Google Scholar] [CrossRef]
- Liu, C.S.; Wang, H.; Zhao, Y.M.; Zhao, L.L.; Dong, H.L. DEM simulation of particle flow on a single deck banana screen. Int. J. Min. Sci. Technol. 2013, 23, 273–277. [Google Scholar] [CrossRef]
- Tan, Y.; Yu, Y.; Fottner, J.; Kessler, S. Automated measurement of the numerical angle of repose (aMAoR) of biomass particles in EDEM with a novel algorithm. Powder Technol. 2021, 388, 462–473. [Google Scholar] [CrossRef]
- Mousaviraad, M.; Tekeste, M.Z.; Rosentrater, K.A. Calibration and validation of a discrete element model of corn using grain flow simulation in a commercial screw grain auger. Trans. ASABE 2017, 60, 1403–1415. [Google Scholar] [CrossRef]
- Chen, X.; Elliott, J.A. On the scaling law of JKR contact model for coarse rained cohesive particles. Chem. Eng. Sci. 2020, 227, 115906. [Google Scholar] [CrossRef]
- Coleman, J.L.; Bolisetti, C.; Whittaker, A.S. Time-domain soil-structure interaction analysis of nuclear facilities. Nucl. Eng. Des. 2016, 298, 264–270. [Google Scholar] [CrossRef]
- Forcellini, D.; Tarantino, A.M. Assessment of stone columns as a mitigation technique of liquefaction-induced effects during italian earthquakes (May 2012). Sci. World J. 2016, 201, 216278. [Google Scholar] [CrossRef]
- Su, L.; Elgamal, A.; Arulmoli, A.K. Seismic performance of a pile-supported wharf: Three dimensional finite element methods. Soil Dyn. Earthq. Eng. 2017, 95, 167–179. [Google Scholar] [CrossRef]
- He, D.; Liu, C. Study on Screening Mechanism and Numerical Simulation for Crashed Concrete Particles by Using DEM. Separations 2022, 32, 153. [Google Scholar] [CrossRef]
- Huang, L.; Yuan, J.; Shi, C.; Ma, S.; Zhou, E. Spatial–temporal evolution characteristics of surface and particles regulated by operating parameters during multi-stage variable inclination equal-thickness screening. Sep. Sci. Technol. 2022, 57, 1337–1350. [Google Scholar] [CrossRef]
- Yang, D.Y.; Frangopol, D.M.; Han, X. Error analysis for approximate structural life-cycle reliability and risk using machine learning methods. Struct. Saf. 2021, 89, 102033. [Google Scholar] [CrossRef]
- Barzegar, R.; Razzagh, S.; Quilty, J.; Adamowski, J.; Pour, H.K.; Booij, M.J. Improving GALDIT-based groundwater vulnerability predictive mapping using coupled resampling algorithms and machine learning models. J. Hydrol. 2021, 598, 126370. [Google Scholar] [CrossRef]
- Giannelli, L.; Sgroi, P.; Brown, J.; Paraoanu, G.S.; Paternostro, M.; Paladino, E.; Falci, G. A tutorial on optimal control and reinforcement learning methods for quantum technologies. Phys. Lett. A 2022, 434, 128054. [Google Scholar] [CrossRef]
- Tang, W.Q.; Yang, Q.; Hu, X.C.; Yan, W.J. Deep learning-based linear defects detection system for large-scale photovoltaic plants based on an edge-cloud computing infrastructure. Sol. Energy 2022, 231, 527–535. [Google Scholar] [CrossRef]
- Li, Z.F.; Tong, X.; Zhou, B.; Wang, X.Y. Modeling and parameter optimization for the design of vibrating screens. Miner. Eng. 2015, 83, 149–155. [Google Scholar] [CrossRef]
- Chen, B.; Huang, D.; Zhang, F. The Modeling Method of a Vibrating Screen Efficiency Prediction Based on KPCA and LS-SVM. Int. J. Pattern Recogn. 2019, 33, 19500009. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Li, Z.F.; Xia, H.H.; Tong, X. Performance optimization of the elliptically vibrating screen with a hybrid MACO-GBDT algorithm. Particuology 2021, 56, 193–206. [Google Scholar] [CrossRef]
- Tang, S.; Yu, F. Construction and verification of retinal vessel segmentation algorithm for color fundus image under BP neural network model. J. Supercomput. 2021, 77, 3870–3884. [Google Scholar] [CrossRef]
- Hong, F.; Wang, R.; Song, J.; Gao, M.; Long, D. A performance evaluation framework for deep peak shaving of the CFB boiler unit based on the DBN-LSSVM algorithm. Energy 2021, 238, 121659. [Google Scholar] [CrossRef]
- Song, Y.; Xie, X.; Wang, Y.; Yang, S.; Wang, P. Energy consumption prediction method based on LSSVM-PSO model for autonomous underwater gliders. Ocean Eng. 2021, 230, 108982. [Google Scholar] [CrossRef]
- Sun, J.; Mo, Y.N.; Chen, Y.; Yang, N.; Tang, Y. Detection of moisture content of tomato leaves based on dielectric properties and IRIV-GWO-SVR algorithm. Trans. ASABE 2018, 34, 188–195. [Google Scholar]
- Yang, Z.; Wang, Y.; Kong, C. Remaining useful life prediction of lithium-ion batteries based on a mixture of ensemble empirical mode decomposition and GWO-SVR model. IEEE Trans. Instrum. Meas. 2021, 70, 2517011. [Google Scholar] [CrossRef]
- Balogun, A.L.; Rezaie, F.; Pham, Q.B.; Gigovie, L.; Drobnjak, S.; Aina, Y.A.; Panahi, M.; Yekeen, S.T.; Lee, S. Spatial prediction of landslide susceptibility in western Serbia using hybrid support vector regression (SVR) with GWO, BAT and COA algorithms. Geosci. Front. 2021, 12, 101104. [Google Scholar] [CrossRef]
- Sovilj, D.; Bjork, K.M.; Lendasse, A. Comparison of combining methods using Extreme Learning Machines under small sample scenario. Neurocomputing 2016, 174, 4–17. [Google Scholar] [CrossRef]
- Bazroun, M.; Yang, Y.C.; Cho, I.H. Flexible and interpretable generalization of self-evolving computational materials framework. Comput. Struct. 2022, 260, 106706. [Google Scholar] [CrossRef]
- Yang, P.; Zang, M.; Zeng, H. An efficient 3D DEM-FEM contact detection algorithm for tire-sand interaction. Powder Technol. 2020, 360, 1102–1116. [Google Scholar] [CrossRef]
- Yang, W.; Wang, M.; Zhou, Z.; Li, L.; Yang, G.; Ding, R. Research on the relationship between macroscopic and mesoscopic mechanical parameters of limestone based on Hertz Mindlin with bonding model. Geomech. Geophys. Geo-Energ. Geo-Resour. 2020, 6, 68. [Google Scholar] [CrossRef]
- Feng, X.; Liu, T.; Wang, L.; Yu, Y.; Zhang, S.; Song, L. Investigation on JKR surface energy of high-humidity maize grains. Powder Technol. 2021, 382, 406–419. [Google Scholar] [CrossRef]
- Wu, K.C.; You, H.I. Determination of solid material elastic modulus and surface energy based on JKR contact model. Appl. Surf. Sci. 2007, 253, 8530–8537. [Google Scholar] [CrossRef]
- Asaf, Z.; Rubinstein, D.; Shumulevich, I. Determination of discrete element model parameters required for soil tillage. Soil Tillage Res. 2007, 92, 227–242. [Google Scholar] [CrossRef]
- Tavares, L.M.; André, F.P.; Potapov, A.; Jr, C.M. Adapting a breakage model to discrete elements using polyhedral particles. Powder Technol. 2020, 362, 208–220. [Google Scholar] [CrossRef]
- Zhong, W.Q.; Yu, A.B.; Liu, X.J.; Tong, Z.B.; Zhang, H. DEM/CFD-DEM modelling of non-spherical particulate systems: Theoretical developments and applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Ulsen, C.; Tseng, E.; Angulo, S.C.; Landmann, M.; Contessoto, R.; Balbo, J.T.; Kahn, H. Concrete aggregates properties crushed by jaw and impact secondary crushing. J. Mater. Res. Technol. 2019, 8, 494–502. [Google Scholar] [CrossRef]
- Legendre, D.; Zevenhoven, R. Assessing the energy efficiency of a jaw crusher. Energy 2014, 74, 119–130. [Google Scholar] [CrossRef]
- Zhou, J.C.; Zhang, L.B.; Cao, L.C.; Tang, J.J.; Mao, K.M. Study on the dynamics characteristics and screening performance of the disc spring vibration screen. J. Low Freq. Noise Vib. Act. Control. 2023, 67, 1–16. [Google Scholar] [CrossRef]
- Zhou, J.C.; Zhang, L.B.; Hu, C.; Li, Z.H.; Tang, J.J.; Mao, K.M.; Wang, X.Y. Calibration of wet sand and gravel particles based on JKR contact model. Powder Technol. 2022, 397, 117005. [Google Scholar] [CrossRef]
- Zhou, J.C.; Zhang, C.Z.; Wang, Z.Q.; Mao, K.M. Study on Dynamic Characteristics of the Disc Spring System in Vibration Screen. Shock. Vib. 2020, 2020, 3518037. [Google Scholar] [CrossRef]
- Zhou, J.C.; Zhang, C.Z.; Wang, Z.Q.; Mao, K.M.; Wang, X.Y. A Study on the Influence of Different Constraint Modes and Number of Disc Springs on the Dynamics of Disc Spring System. Shock. Vib. 2021, 2021, 8866159. [Google Scholar] [CrossRef]
- Vipulanandan, C.; Liu, J. Performance of polyurethane-coated concrete in sewer environment. Cem. Concr. Res. 2005, 35, 1754–1763. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Tong, X.; Li, Z.F. Numerical Investigation on the Sieving Performance of Elliptical Vibrating Screen. Processes 2020, 8, 1151. [Google Scholar] [CrossRef]
- Wu, L.J.; Cao, G.H. Seasonal SVR with FOA algorithm for single-step and multi-step ahead forecasting in monthly inbound tourist flow. Knowl. Based-Syst. 2016, 110, 157–166. [Google Scholar]
- Peng, X.J. TSVR: An efficient Twin Support Vector Machine for regression. Neural Netw. 2010, 23, 365–372. [Google Scholar] [CrossRef] [PubMed]
- Svard, M.; Nordstrom, J. Review of summation-by-parts schemes for initial–boundary-value problems. J. Comput. Phys. 2014, 268, 17–38. [Google Scholar] [CrossRef]
- Hadem, P.; Saikia, D.K.; Moulik, S. An SDN-based Intrusion detection system using SVM with selective logging for IP traceback. Comput. Netw. 2021, 191, 108015. [Google Scholar] [CrossRef]
- Yu, Y.; Mckelvey, T.; Kung, S.Y. A classification scheme for “high-dimensional-small-sample-size” data using soda and ridge-SVM with microwave measurement applications. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 3542–3546. [Google Scholar]
- Khademolqorani, S. Quality Mining in a Continuous production line based on an improved Genetic Algorithm Fuzzy Support Vector Machine (GAFSVM). Comput. Ind. Eng. 2022, 169, 1082818. [Google Scholar] [CrossRef]
- Niu, M.; Wang, Y.; Sun, S.; Li, Y. A novel hybrid decomposition-and-ensemble model based on CEEMD and GWO for short-term PM2.5 concentration forecasting. Atmos. Environ. 2016, 134, 168–180. [Google Scholar]
- Zhu, S.L.; Qiu, X.L.; Yin, Y.R.; Fang, M.; Liu, X.R.; Zhao, X.J.; Shi, Y.J. Two-step-hybrid model based on data preprocessing and intelligent optimization algorithms (CS and GWO) for NO2 and SO2 forecasting. Atmos. Pollut. Res. 2019, 10, 1326–1335. [Google Scholar] [CrossRef]
- Zhu, S.L.; Wang, X.; Shi, N.Y.; Lu, M.M. CEEMD-subset-OASVR-GRNN for ozone forecasting: Xiamen and Harbin as cases. Atmos. Pollut. Res. 2020, 11, 744–754. [Google Scholar] [CrossRef]
- Wang, C.H.; Guo, W. Prediction of Landslide Displacement Based on the Variational Mode Decomposition and GWO-SVR Model. Sustainability 2023, 15, 5470. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, C.; Xiao, C.Y.; Zhao, X.L.; Shi, Y.X.; Yang, H.; Liu, Z.Y.; Li, S.H. Study on Prediction Model of Soil Cadmium Content Moisture Content Correction Based on GWO-SVR. Acta Phys. Sin. 2020, 40, 1030002. [Google Scholar]
- Sun, J.; Tian, Y.; Wu, X.H.; Bai, C.X.; Lu, B. Nondestructive detection for moisture content in green tea based on dielectric properties and VISSA-GWO-SVR algorithm. J. Food Process. Preserv. 2020, 44, e14421. [Google Scholar] [CrossRef]
- Zhang, Z.; Hong, W.C. Application of variational mode decomposition and chaotic grey wolf optimizer with support vector regression for forecasting electric loads. Knowl. Based-Syst. 2021, 228, 107297. [Google Scholar] [CrossRef]
- Xia, R.; Li, B.; Wang, X.; Li, T.; Yang, Z. Measurement and calibration of the discrete element parameters of wet bulk coal. Measurement 2019, 142, 84–95. [Google Scholar] [CrossRef]
- Yang, W.; Zhao, J.; Liu, X.; Liao, J. Simulation and test of "separated burying device" of green manure teturning machine based on the EDEM software. Agriculture 2022, 12, 569. [Google Scholar] [CrossRef]
- Wang, X.Y.; Liang, L.L.; Li, W.Y.; Li, D.M.; Yang, H.Y. A new SVM-based relevance feedback image retrieval using probabilistic feature and weighted kernel function. J. Vis. Commun. Image Represent. 2016, 38, 256–275. [Google Scholar] [CrossRef]
- Yin, S.; Yin, J.P. Tuning kernel parameters for SVM based on expected square distance ratio. Inform. Sci. 2016, 370–371, 92–102. [Google Scholar] [CrossRef]
- Li, S.; Pu, J.; Zhu, S.P.; Gui, Y.G. Co3O4@TiO2@Y2O3 nanocomposites for a highly sensitive CO gas sensor and quantitative analysis. J. Hazard. Mater. 2022, 422, 126880. [Google Scholar] [CrossRef]
- Ahmed, H.; Abu, E.A.; Aboul, E.H. Two-class support vector machine with new kernel function based on paths of features for predicting chemical activity. Inform. Sci. 2017, 403–404, 42–54. [Google Scholar]
- Panabi, M.; Gayen, A.; Pourghasemi, H.R.; Rezaie, F.; Lee, S. Spatial prediction of landslide susceptibility using hybrid support vector regression (SVR) and the adaptive neuro-fuzzy inference system (ANFIS) with various metaheuristic algorithms. Sci. Total Environ. 2020, 741, 139937. [Google Scholar] [CrossRef] [PubMed]
- Dhiman, H.S.; Dipankar, D.; Guerrero, J.M. Hybrid machine intelligent SVR variants for wind forecasting and ramp events. Renew. Sustain. Energy Rev. 2019, 108, 369–379. [Google Scholar] [CrossRef]
- Luo, C.Q.; Keshtagar, B.; Zhu, S.P.; Niu, X.P. EMCS-SVR: Hybrid efficient and accurate enhanced simulation approach coupled with adaptive SVR for structural reliability analysis. Comput. Methods Appl. Mech. Eng. 2022, 400, 115499. [Google Scholar] [CrossRef]
- Bian, X.Q.; Huang, J.H.; Wang, Y.; Liu, Y.B.; Kasthuriarachchi, D.T.K.; Huang, L.J. Prediction of wax disappearance temperature by intelligent models. Energ. Fuel 2019, 33, 2934–2949. [Google Scholar] [CrossRef]
- Park, I.; Sunwoo, M. FlexRay Network parameter optimization method for automotive applications. IEEE Trans. Ind. Electron. 2011, 58, 1449–1459. [Google Scholar] [CrossRef]
- Du, X.P.; Xu, H.Y.; Zhu, F. Understanding the effect of hyperparameter optimization on machine learning models for structure design problems. Comput. Aided Des. 2021, 135, 103013. [Google Scholar] [CrossRef]
- Cong, S.L.; Sun, J.; Mao, H.P.; Wu, X.H.; Pei, W.; Zhang, X.D. Non-destructive detection for mold colonies in rice based on hyperspectra and GWO-SVR. J. Sci. Food Agric. 2017, 98, 1453–1459. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Particle Type | Radius ofFilling Ball (mm) | Surface Energy (J·m−2) | Rolling Friction Coefficient |
|---|---|---|---|
| Flat | 3.5 | 0.180206 | 0.032 |
| Triangular cone | 3 | 0.1907 | 0.029 |
| Ellipsoid | 1 | 0.2078 | 0.29 |
| Parameter | Value |
|---|---|
| Collision recovery coefficient between particle | 0.35 |
| Collision recovery coefficient between particle and polyurethane plate | 0.25 |
| Static friction coefficient between particle | 0.3 |
| Static friction coefficient between particle and polyurethane plate | 0.625 |
| Rolling friction coefficient between particle and polyurethane plate | 0.05 |
| Parameters | Value (mm) |
|---|---|
| Screen length | 700 |
| Screen width | 400 |
| Screen thickness | 2 |
| Aperture size | 20 |
| Feeding height | 100 |
| Receiving area length | 700 |
| Blanking area length | 500 |
| Material | Components | Poisson’s Ratio | Shear Modulus | Density |
|---|---|---|---|---|
| Stone | particles | 0.25 | 50 MPa | 2500 kg/m3 |
| Steel | screen box | 0.27 | 79.92 GPa | 7850 kg/m3 |
| Polyurethane | screen mesh | 0.43 | 500 MPa | 1100 kg/m3 |
| Trial | Factor 1 | Factor 2 | Factor 3 | Factor 4 | Factor 5 | Factor 6 | Factor 7 |
|---|---|---|---|---|---|---|---|
| a (mm) | f (Hz) | α (°) | θ (°) | b/a | v (m/s) | L (mm) | |
| 1 | 2 | 12 | 25 | 10 | 0.2 | 0.5 | 660 |
| 2 | 3 | 14 | 35 | 12 | 0.4 | 1.0 | 680 |
| 3 | 4 | 16 | 45 | 14 | 0.6 | 1.5 | 700 |
| 4 | 5 | 18 | 55 | 16 | 0.8 | 2.0 | 720 |
| 5 | 6 | 20 | 65 | 18 | 1.0 | 2.5 | 740 |
| Linear Kernel Function: K(xi·xj) = xi·xj | Polynomial Kernel Function K(xi·xj) = (xi·xj+1)d |
|---|---|
| Sigmoid kernel function: K(xi·xj) = tanh(kxi·xj − δ) | Gaussian kernel function: K(xi·xj) = e |
| Learning Objectives | Screening Efficiency η(%) | Screening Time t(s) | |||
|---|---|---|---|---|---|
| Evaluating Indicator | Linear | Gaussian | Linear | Gaussian | |
| RMSE | 4.882 | 5.773 | 0.6708 | 0.6283 | |
| MAE | 0.0832 | 0.0707 | 0.6322 | 0.5816 | |
| R2 | 0.7194 | 0.6465 | 0.5758 | 0.5163 | |
| Running time (min) | 369.30 | 101.47 | 156.85 | 73.82 | |
| Optimization Objectives | a (mm) | f (Hz) | α (°) | θ (°) | b/a | v (m/s) | L (mm) | Optimal Value |
|---|---|---|---|---|---|---|---|---|
| Screening efficiency (%) | 3.0 | 17.1 | 45 | 12 | 0.35 | 1.4 | 660.0 | 88.37% |
| Screening time t(s) | 4.0 | 20.1 | 45 | 15.5 | 0.42 | 1.7 | 683.0 | 11.83 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Zhang, L.; Cao, L.; Wang, Z.; Zhang, H.; Shen, M.; Wang, Z.; Liu, F. Study on Screening Parameter Optimization of Wet Sand and Gravel Particles Using the GWO-SVR Algorithm. Processes 2023, 11, 1283. https://doi.org/10.3390/pr11041283
Zhou J, Zhang L, Cao L, Wang Z, Zhang H, Shen M, Wang Z, Liu F. Study on Screening Parameter Optimization of Wet Sand and Gravel Particles Using the GWO-SVR Algorithm. Processes. 2023; 11(4):1283. https://doi.org/10.3390/pr11041283
Chicago/Turabian StyleZhou, Jiacheng, Libin Zhang, Longchao Cao, Zhen Wang, Hui Zhang, Min Shen, Zilong Wang, and Fang Liu. 2023. "Study on Screening Parameter Optimization of Wet Sand and Gravel Particles Using the GWO-SVR Algorithm" Processes 11, no. 4: 1283. https://doi.org/10.3390/pr11041283
APA StyleZhou, J., Zhang, L., Cao, L., Wang, Z., Zhang, H., Shen, M., Wang, Z., & Liu, F. (2023). Study on Screening Parameter Optimization of Wet Sand and Gravel Particles Using the GWO-SVR Algorithm. Processes, 11(4), 1283. https://doi.org/10.3390/pr11041283