Effect of Control Horizon in Model Predictive Control for Steam/Water Loop in Large-Scale Ships




Abstract
:1. Introduction
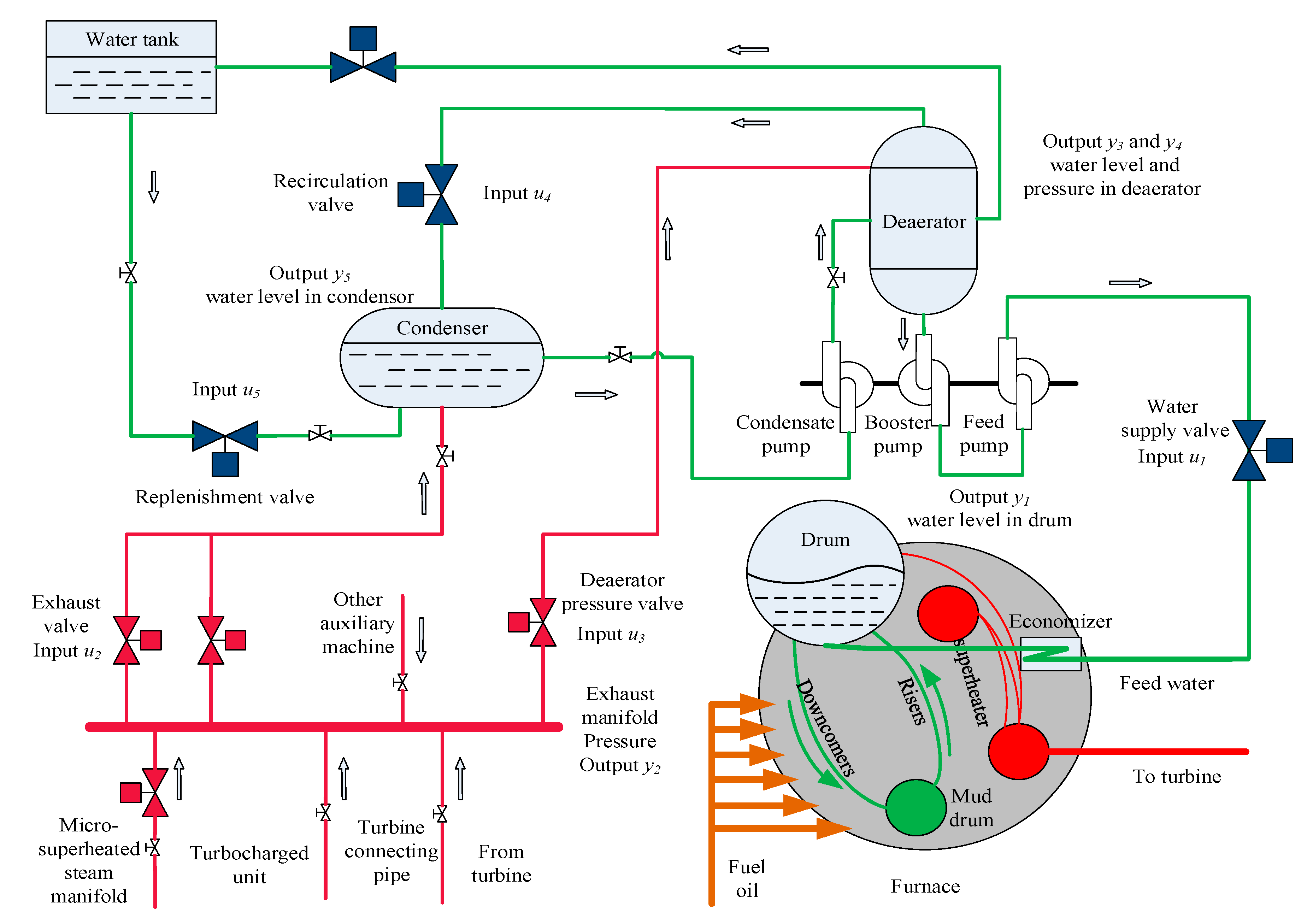
2. Description of the Steam/Water Loop
3. Model Predictive Control with Optimized Control Horizon
3.1. Brief Introduction to Extended Prediction Self-Adaptive Control (EPSAC)
3.2. Ripple-Free Model Predictive Control (MPC)
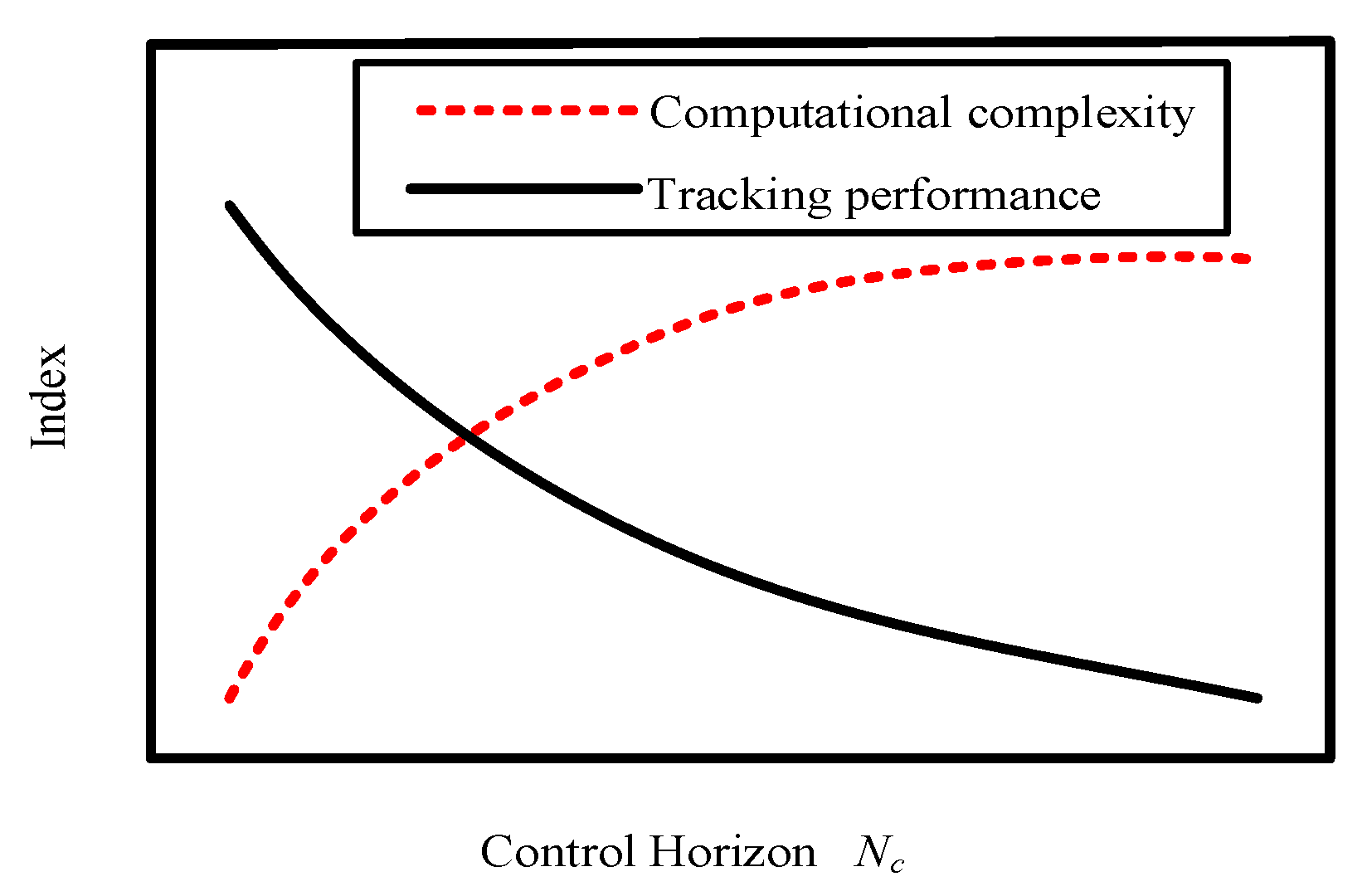
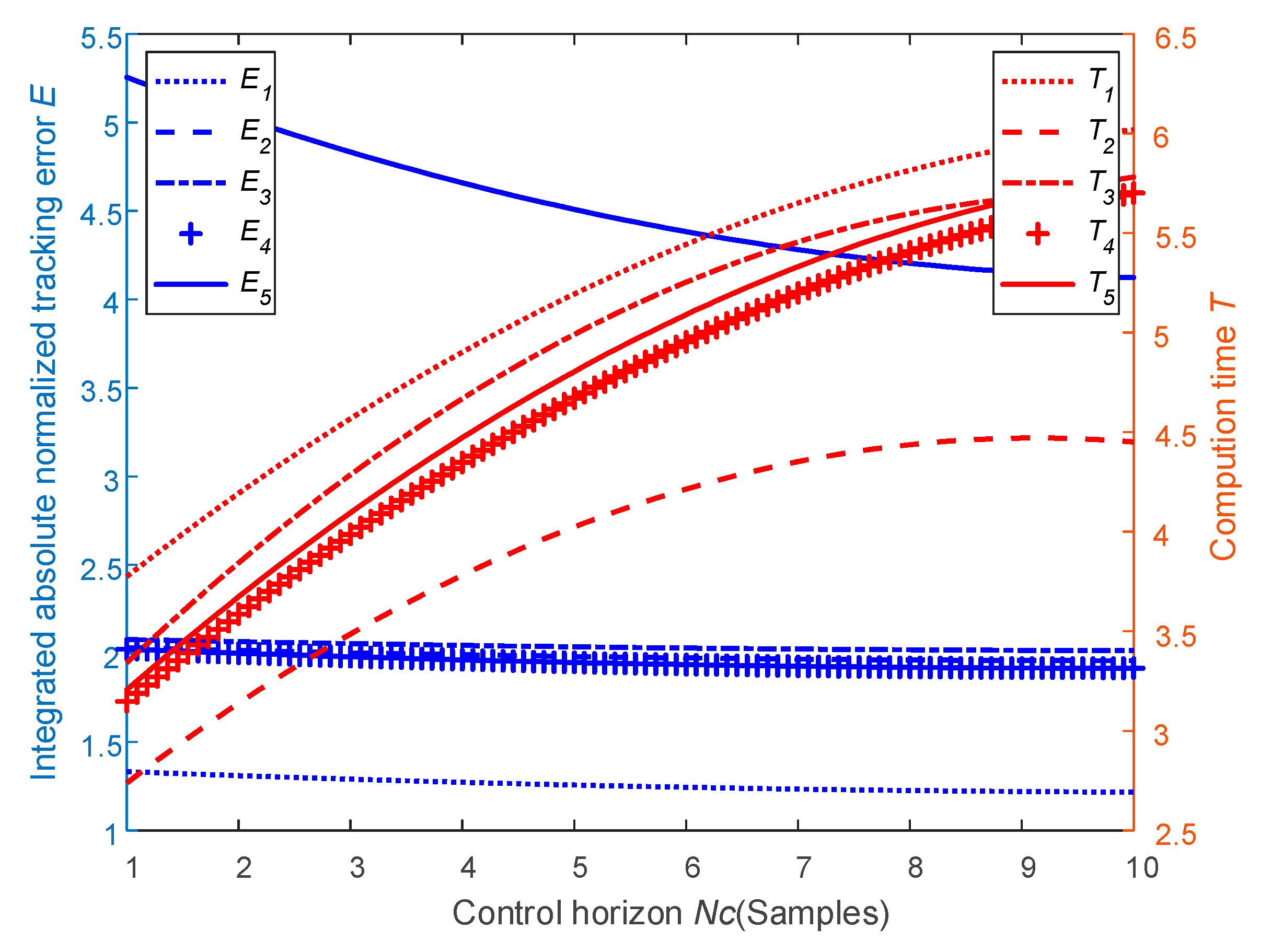
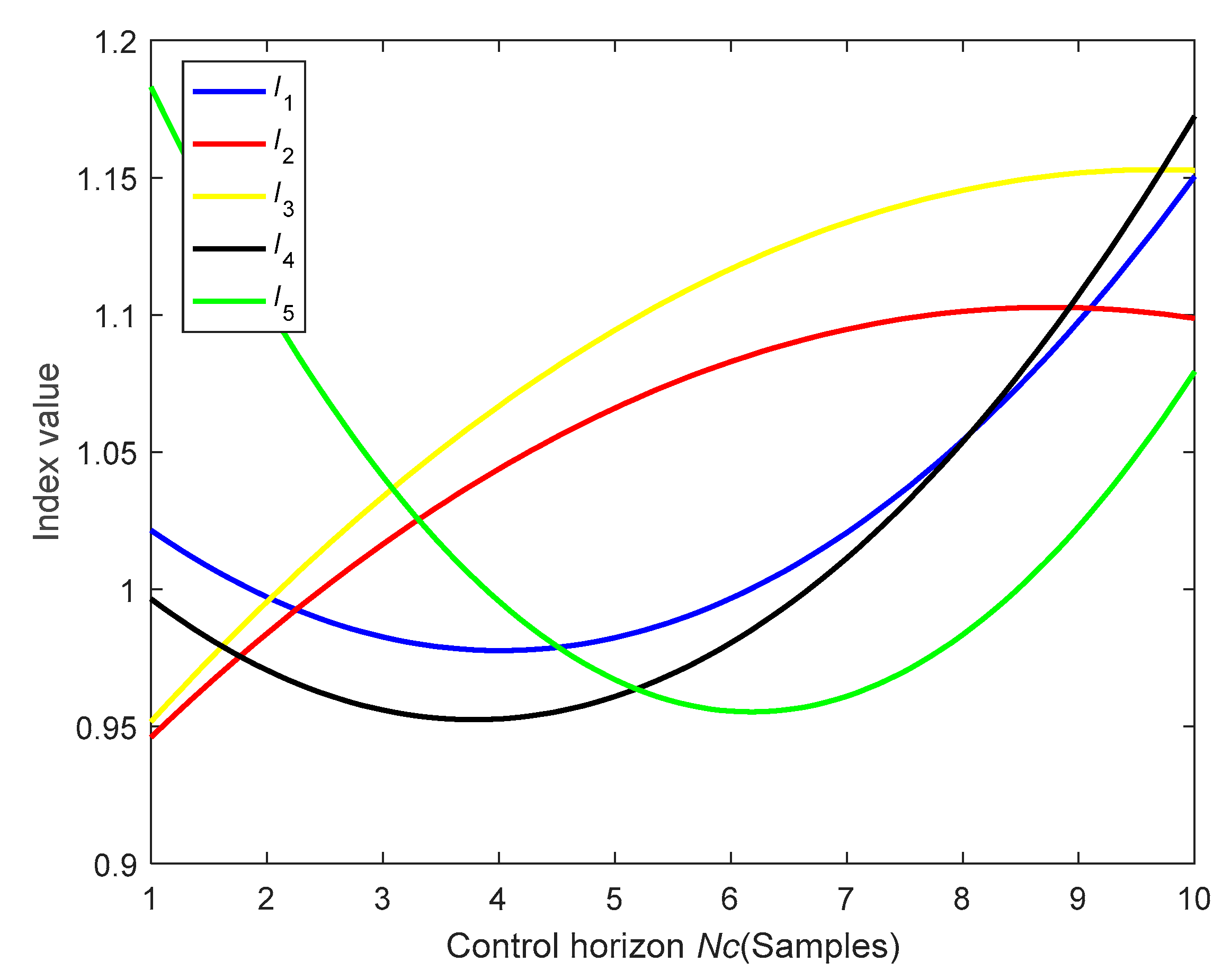
3.3. Optimized Control Horizon
4. Simulation Results and Analysis
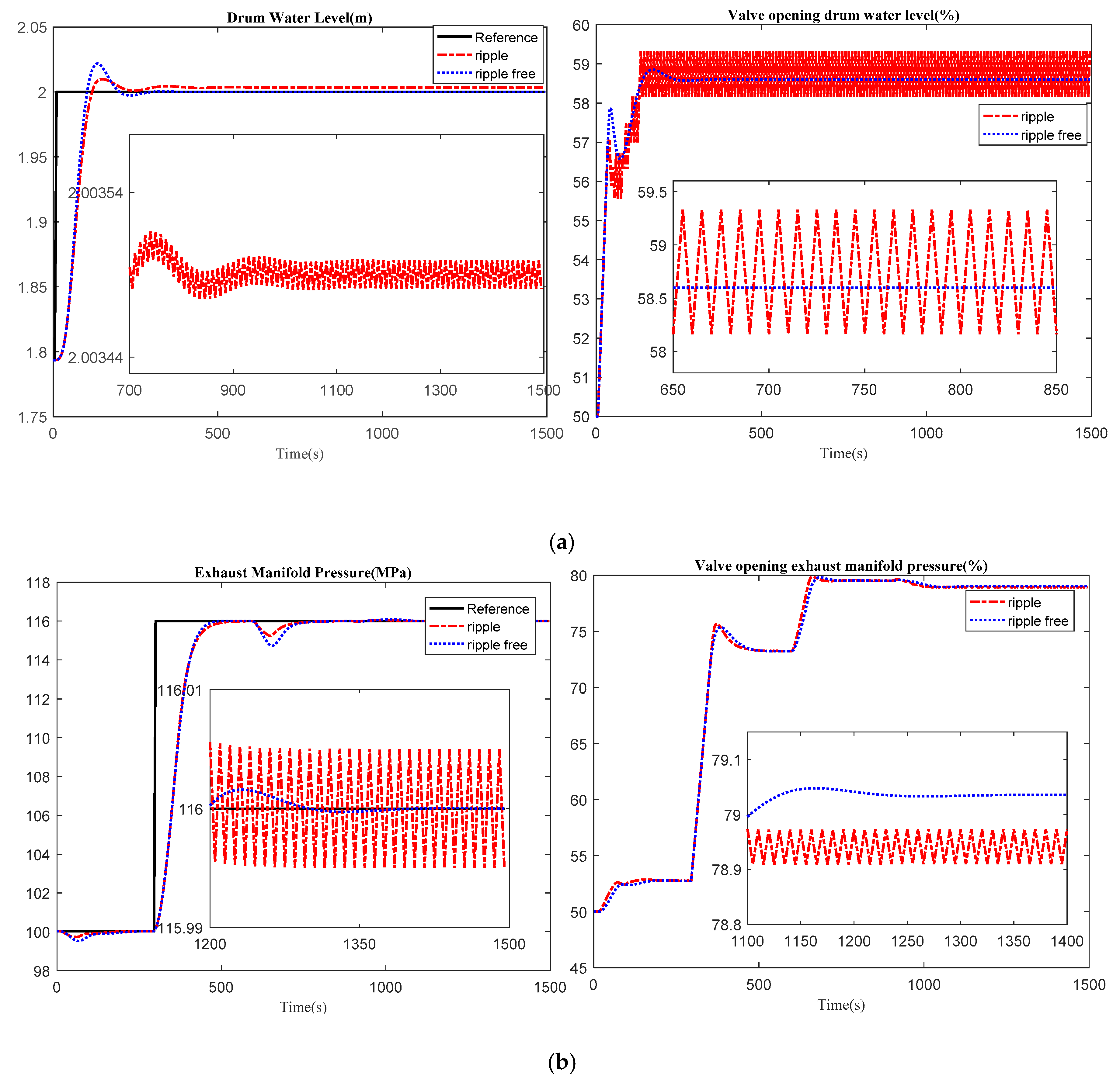
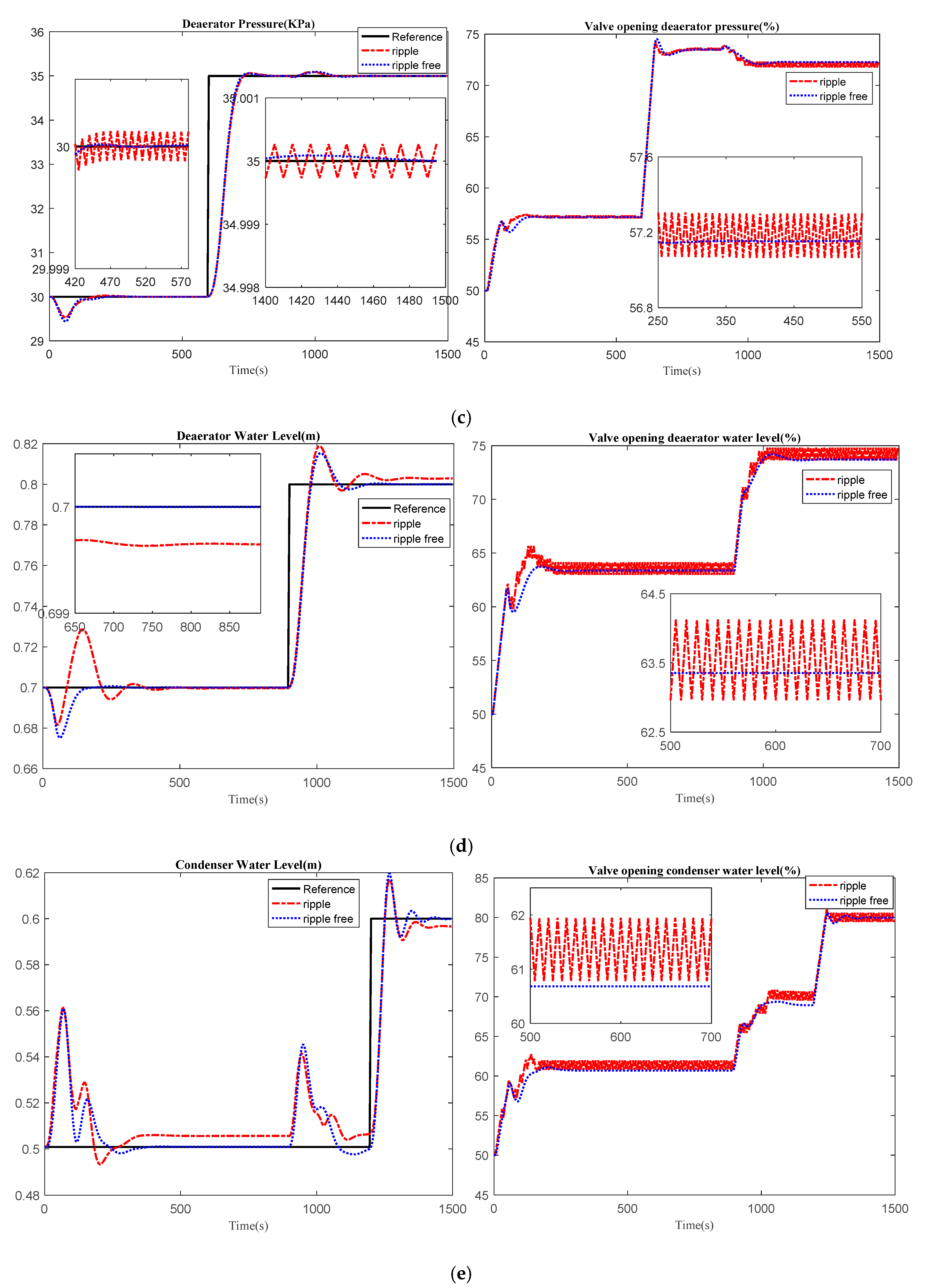
4.1 Ripple-Free Validation
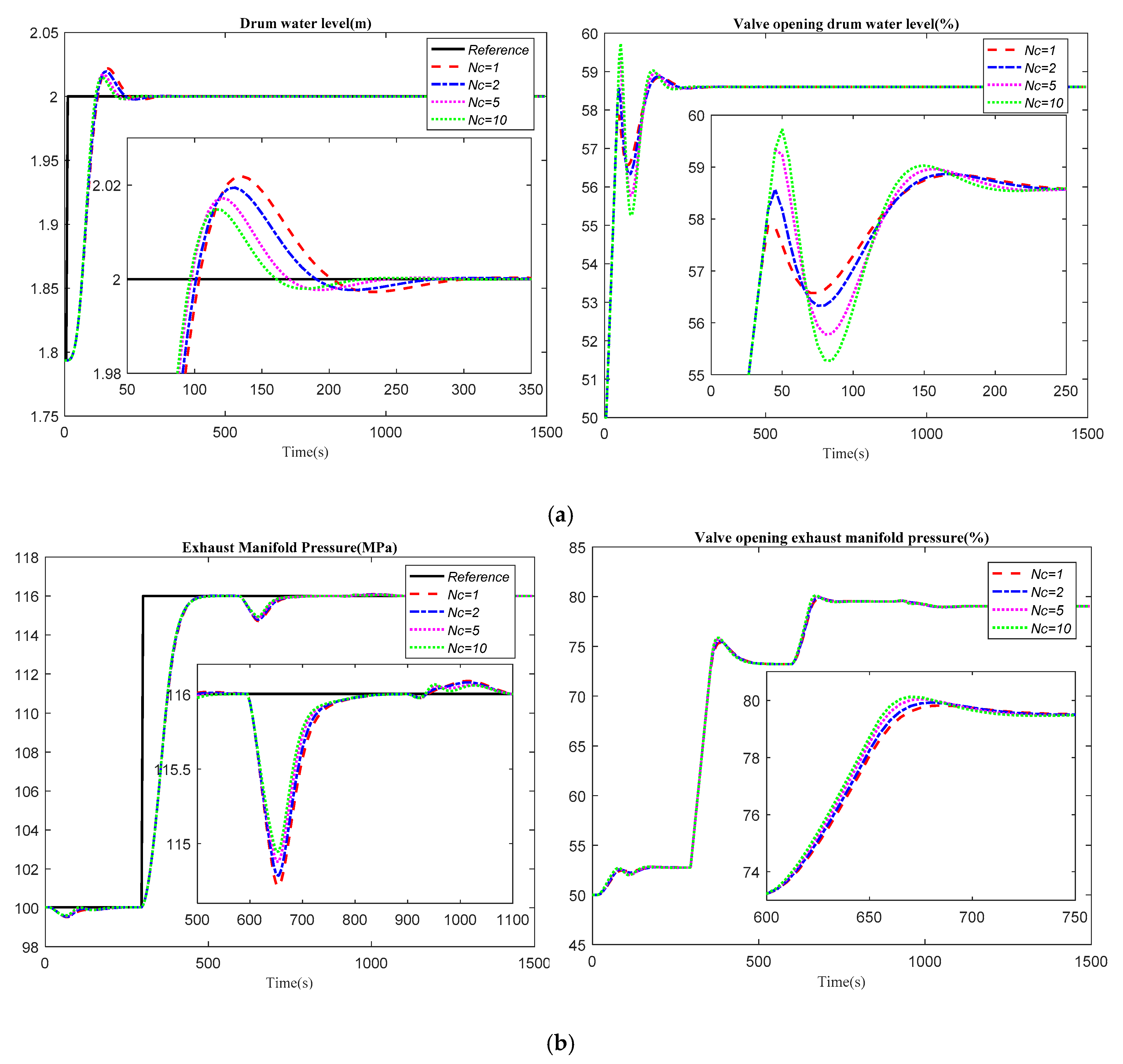
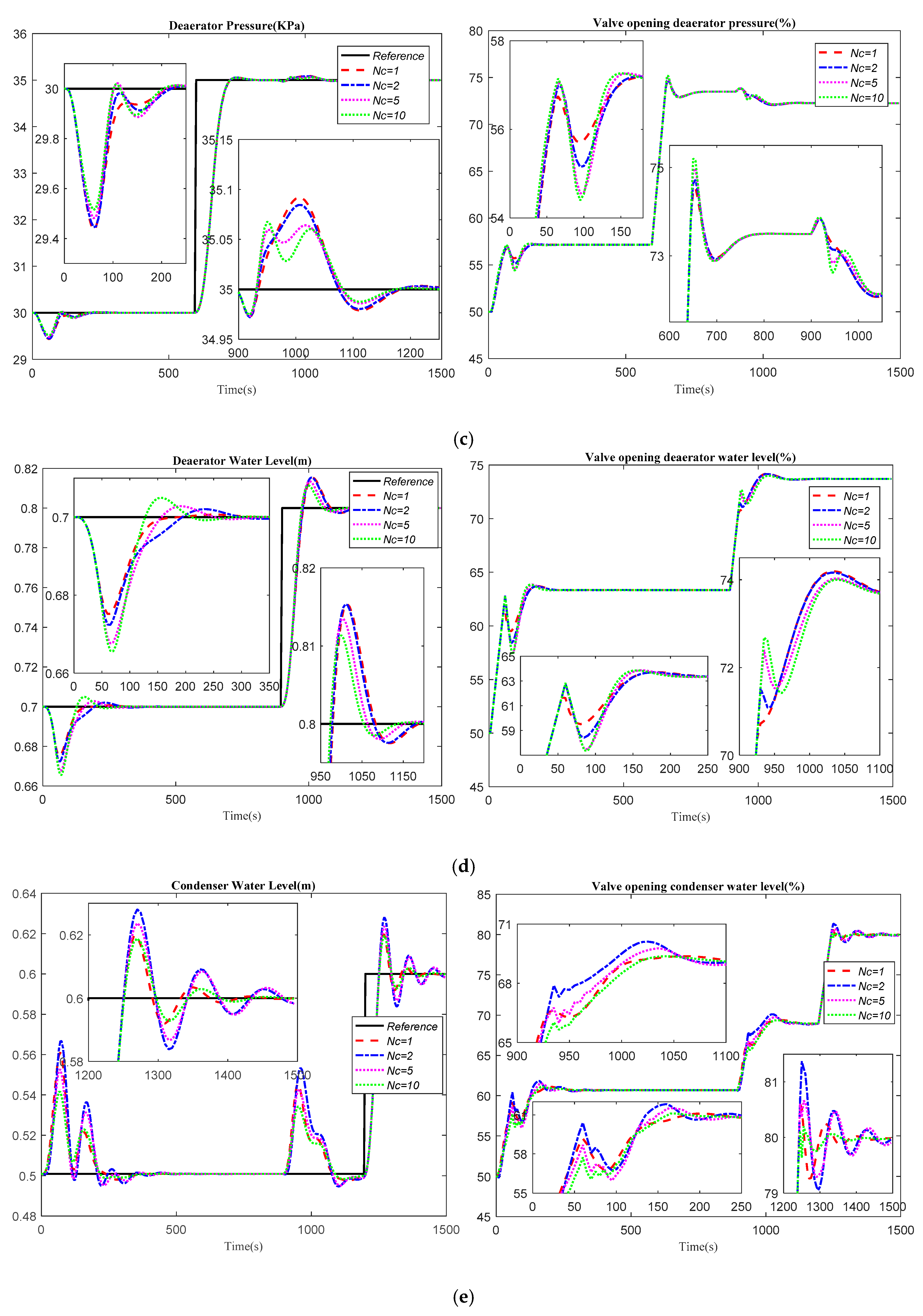
4.2. Influence of Different Control Horizon Sets
- Case 1: Nc1,…,Nc5 = 1 sample;
- Case 2: Nc1,…,Nc5 = 2 samples;
- Case 3: Nc1,…,Nc5 = 5 samples;
- Case 4: Nc1,…,Nc5 = 10 samples.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Sun, L.; Hua, Q.; Li, D.; Pan, L.; Xue, Y.; Lee, K.Y. Direct energy balance based active disturbance rejection control for coal-fired power plant. ISA Trans. 2017, 70, 486–493. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Ionescu, C.M.; De Keyser, R.; Liu, S. A Robust PID Autotuning Method for Steam/Water Loop in Large Scale Ships. In Proceedings of the 3rd IFAC Conference in Advances in Proportional-Integral-Derivative Control, Ghent, Belgium, 9–11 May 2018; pp. 462–467. [Google Scholar]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Robust adaptive passivity-based control of open-loop unstable affine non-linear systems subject to actuator saturation. IET Control Theory Appl. 2017, 11, 2731–2742. [Google Scholar] [CrossRef]
- Wang, W.L.A.; Mukai, H. Stability of linear time-invariant open-loop unstable systems with input saturation. Asian J. Control 2004, 6, 496–506. [Google Scholar] [CrossRef]
- Scarciotti, G.; Astolfi, A. Approximate finite-horizon optimal control for input-affine nonlinear systems with input constraints. J. Control Decis. 2014, 1, 149–165. [Google Scholar] [CrossRef]
- Li, Y.; Li, T.; Tong, S. Adaptive fuzzy modular backstepping output feedback control of uncertain nonlinear systems in the presence of input saturation. Int. J. Mach. Learn. Cybern. 2013, 4, 527–536. [Google Scholar] [CrossRef]
- Maxim, A.; Copot, D.; De Keyser, R.; Ionescu, C.M. An industrially relevant formulation of a distributed model predictive control algorithm based on minimal process information. J. Process Control 2018, 68, 240–253. [Google Scholar] [CrossRef]
- Fu, D.; Zhang, H.; Yu, Y.; Ionescu, C.M.; Aghezzaf, E.; De Keyser, R. A Distributed Model Predictive Control Strategy for Bullwhip Reducing Inventory Management Policy. IEEE Trans. Ind. Inf. 2018, in press. [Google Scholar] [CrossRef]
- Liu, X.; Cui, J. Economic model predictive control of boiler-turbine system. J. Process Control 2018, 66, 59–67. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.; Lee, K.Y. Fuzzy modeling and stable model predictive tracking control of large-scale power plants. J. Process Control 2014, 24, 1609–1626. [Google Scholar] [CrossRef]
- Liu, X.J.; Chan, C.W. Neuro-fuzzy generalized predictive control of boiler steam temperature. IEEE Trans. Energy Convers. 2006, 21, 900–908. [Google Scholar] [CrossRef]
- Liu, X.; Guan, P.; Chan, C.W. Nonlinear multivariable power plant coordinate control by constrained predictive scheme. IEEE Trans. Control Syst. Technol. 2010, 18, 1116–1125. [Google Scholar] [CrossRef]
- Liu, X.; Kong, X. Nonlinear fuzzy model predictive iterative learning control for drum-type boiler–turbine system. J. Process Control 2013, 23, 1023–1040. [Google Scholar] [CrossRef]
- Havlena, V.; Findejs, J. Application of model predictive control to advanced combustion control. Control Eng. Pract. 2005, 13, 671–680. [Google Scholar] [CrossRef]
- Zhao, S.; Cajo, R.; De Keyser, R.; Ionescu, C.M. Nonlinear predictive control applied to steam/water loop in large scale ships. In Proceedings of the 12th IFAC Symposium on Dynamics and Control of Process Systems, including Biosystems (under review).
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2003; pp. 85–102. [Google Scholar]
- Ohtsuka, T. A continuation/GMRES method for fast computation of nonlinear receding horizon control. Automatica 2004, 40, 563–574. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodríguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar]
- De Keyser, R. Model based predictive control for linear systems. In Control Systems, Robotics and Automation-Volume XI Advanced Control Systems-V; Unbehauen, H., Ed.; UNESCO: Oxford, UK, 2003; pp. 24–58. [Google Scholar]
- Åström, K.J.; Bell, R.D. Drum-boiler dynamics. Automatica 2000, 36, 363–378. [Google Scholar]
- Wang, P.; Liu, M.; Ge, X. Study of the improvement of the exhaust steam maniline pressure control system of a steam-driven power plant. J. Eng. Therm. Energy Power 2014, 29, 65–70. [Google Scholar]
- Wang, P.; Meng, H.; Dong, P.; Dai, R. Decoupling control based on pid neural network for deaerator and condenser water level control system. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 3441–3446. [Google Scholar]
- De Keyser, R.; Ionescu, C.M. The disturbance model in model based predictive control. In Proceedings of the IEEE Conference on Control Applications (CCA 2003), Istanbul, Turkey, 25–25 June 2003; pp. 446–451. [Google Scholar]
- Ribeiro, C.C.; Rosseti, I.; Souza, R.C. Effective probabilistic stopping rules for randomized metaheuristics: GRASP implementations. In Learning and Intelligent Optimization; Springer: Berlin, Germany, 2011; Volume 6683, pp. 146–160. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output Variables | Operating Points | Range | Units |
|---|---|---|---|
| Drum water level | 1.79 | 1.39–2.19 | m |
| Exhaust manifold pressure | 100.03 | 87.03–133.8 | MPa |
| Deaerator pressure | 30 | 24.9–43.86 | KPa |
| Deaerator water level | 0.7 | 0.489–0.882 | m |
| Condenser water level | 0.5 | 0.32–0.63 | m |
| Controllers | Nc | Ts | Np | λ | N1 | Ns |
|---|---|---|---|---|---|---|
| EPSAC | 10 | 5 s | Np1 = 20; Np2 = 15; Np3 = 15; Np4 = 20; Np5 = 20 | 0 | 1 | 300 |
| Ripple-free EPSAC | 0.3 |
| Time (s) | 2–300 | 300–600 | 600–900 | 900–1200 | 1200–1500 |
|---|---|---|---|---|---|
| Drum Water Level (m) | 2 | 2 | 2 | 2 | 2 |
| Exhaust Manifold Pressure (MPa) | 100.03 | 116 | 116 | 116 | 116 |
| Deaerator Pressure (KPa) | 30 | 30 | 35 | 35 | 35 |
| Deaerator Water Level (m) | 0.7 | 0.7 | 0.7 | 0.8 | 0.8 |
| Condenser Water Level (m) | 0.5 | 0.5 | 0.5 | 0.5 | 0.6 |
| Loop 1 | Loop 2 | Loop 3 | Loop 4 | Loop 5 | |
|---|---|---|---|---|---|
| Nc = 1 | 1.342 | 2.039 | 2.08 | 1.933 | 4.603 |
| Nc = 2 | 1.294 | 2.007 | 2.063 | 2.04 | 5.595 |
| Nc = 5 | 1.242 | 1.976 | 2.038 | 1.999 | 5.012 |
| Nc = 10 | 1.215 | 1.957 | 2.015 | 1.919 | 4.147 |
| Loop 1 | Loop 2 | Loop 3 | Loop 4 | Loop 5 | |
|---|---|---|---|---|---|
| Nc = 1 | 3.384 | 2.687 | 3.182 | 2.584 | 2.79 |
| Nc = 2 | 4.778 | 3.217 | 4.083 | 4.432 | 4.297 |
| Nc = 5 | 6.058 | 4.456 | 5.716 | 5.757 | 5.822 |
| Nc = 10 | 5.959 | 4.393 | 5.195 | 5.332 | 5.455 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Maxim, A.; Liu, S.; De Keyser, R.; Ionescu, C. Effect of Control Horizon in Model Predictive Control for Steam/Water Loop in Large-Scale Ships. Processes 2018, 6, 265. https://doi.org/10.3390/pr6120265
Zhao S, Maxim A, Liu S, De Keyser R, Ionescu C. Effect of Control Horizon in Model Predictive Control for Steam/Water Loop in Large-Scale Ships. Processes. 2018; 6(12):265. https://doi.org/10.3390/pr6120265
Chicago/Turabian StyleZhao, Shiquan, Anca Maxim, Sheng Liu, Robin De Keyser, and Clara Ionescu. 2018. "Effect of Control Horizon in Model Predictive Control for Steam/Water Loop in Large-Scale Ships" Processes 6, no. 12: 265. https://doi.org/10.3390/pr6120265
APA StyleZhao, S., Maxim, A., Liu, S., De Keyser, R., & Ionescu, C. (2018). Effect of Control Horizon in Model Predictive Control for Steam/Water Loop in Large-Scale Ships. Processes, 6(12), 265. https://doi.org/10.3390/pr6120265