Multi-Size Proppant Pumping Schedule of Hydraulic Fracturing: Application to a MP-PIC Model of Unconventional Reservoir for Enhanced Gas Production



Abstract
:1. Introduction
2. High-Fidelity Model Formulation Using the MP-PIC Model
2.1. Fluid Phase
2.2. Particle Phase
2.3. Propped Fracture Conductivity
2.4. Reservoir Simulator
3. Field-Scale Simulation Results Using the MP-PIC Model
4. Optimal Operation of Hydraulic Fracturing Using the MP-PIC Model
4.1. Background on Existing Pumping Schedules
4.2. Handling the Computational Requirement of the MP-PIC Model
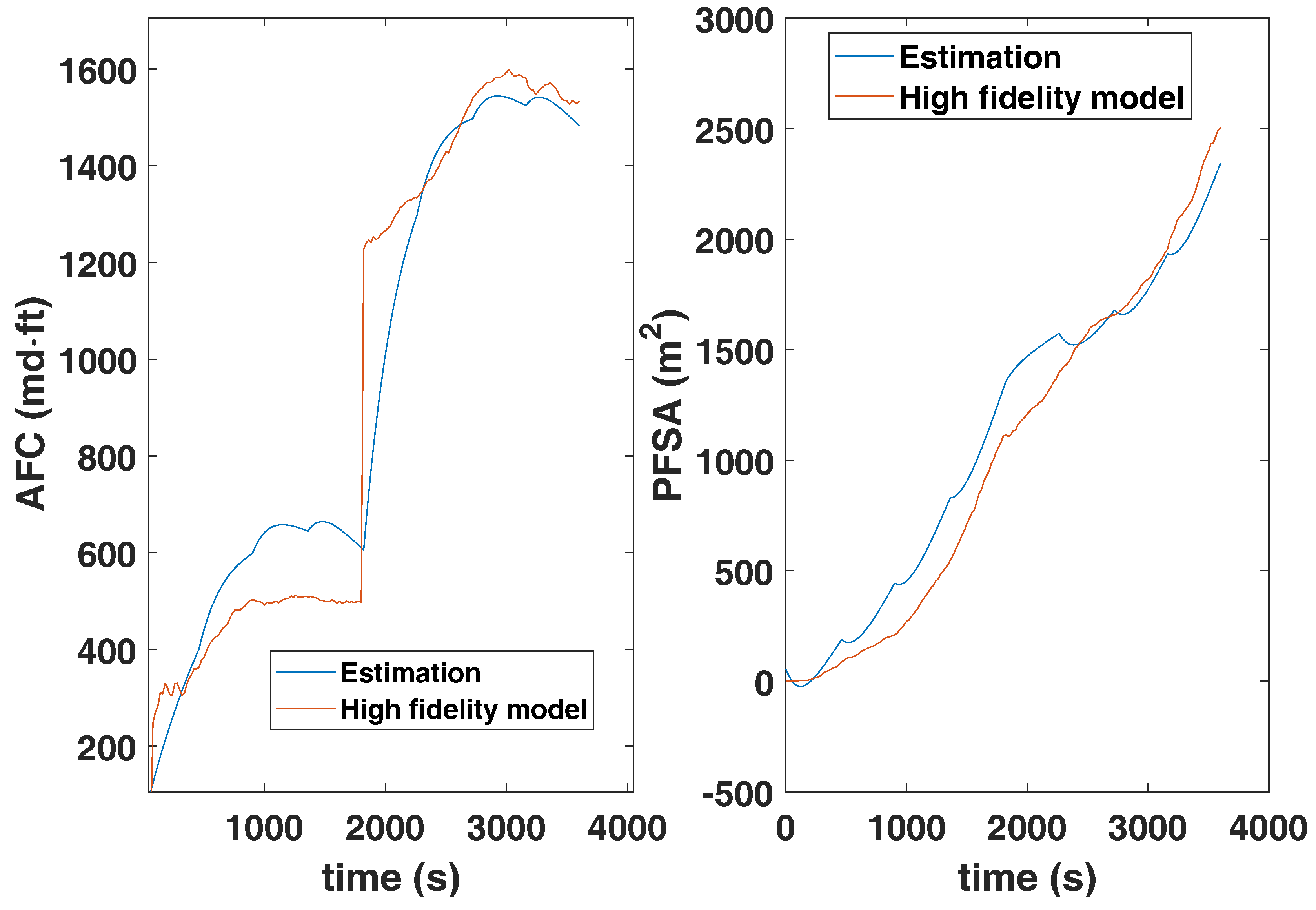
4.2.1. ROM to Simulate the Hydraulic Fracturing Process
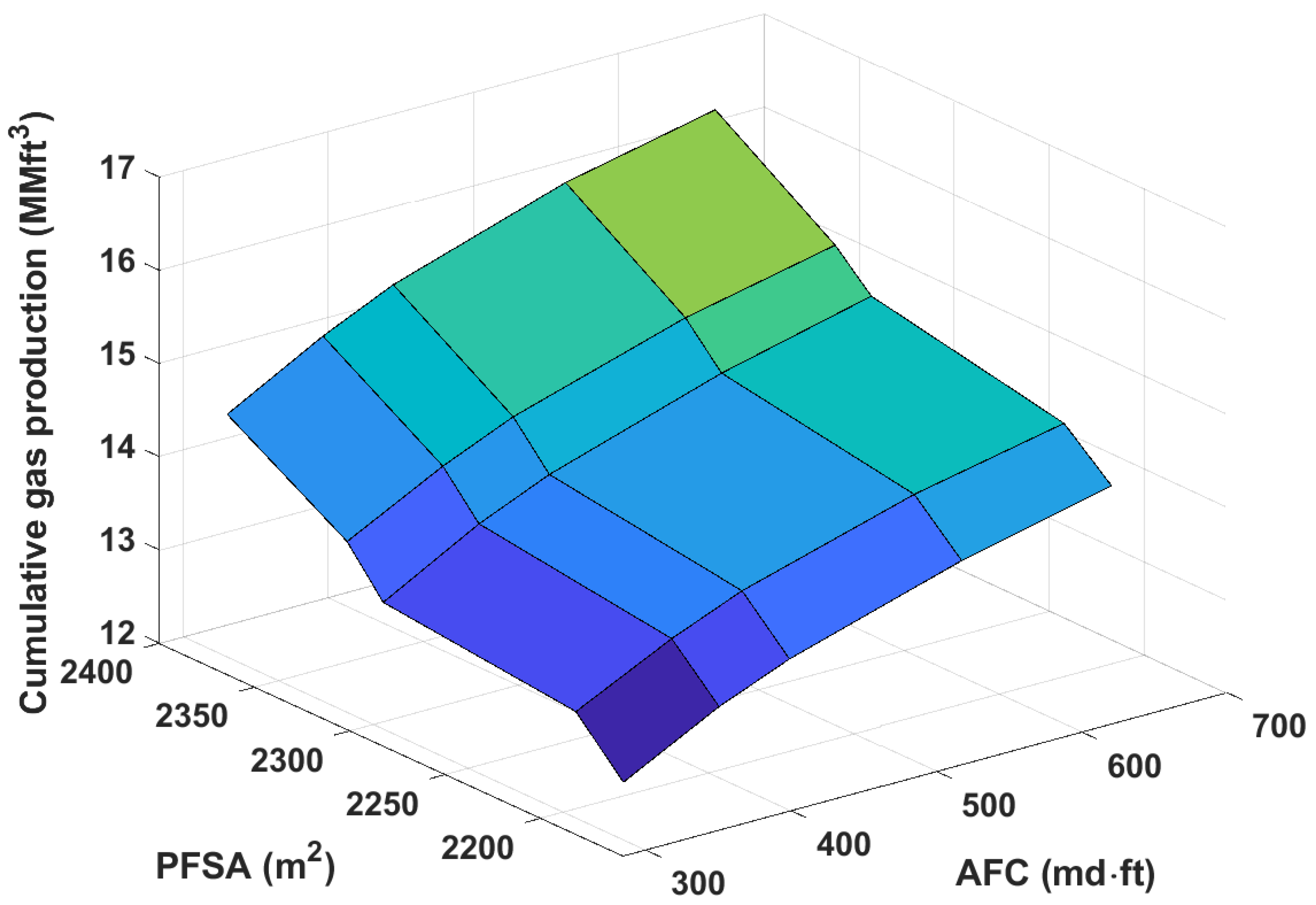
4.2.2. Map to Correlate the Fracture Properties to the Cumulative Gas Production Volume
4.3. Optimization Framework to Maximize Cumulative Shale Gas Production Volume from Unconventional Reservoirs
5. Proposed Optimization Framework Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CFD-DEM | Computational fluid dynamics-discrete element method |
| MP-PIC | Multiphase particle-in-cell |
| PFSA | Propped fracture surface area |
| AFC | Average fracture conductivity |
| CMG | Computer modeling group |
| ROM | Reduced-order model |
| MOESP | Multi-variable output error state-space |
| PPGA | Pound of the proppant added to one gallon of fracturing fluid |
References
- Economides, M.J.; Watters, L.T.; Dunn-Normall, S. Petroleum Well Construction; Wiley: Hoboken, NJ, USA, 1998. [Google Scholar]
- Economides, M.J.; Nolte, K.G. Reservoir Stimulation; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Bhattacharya, S.; Nikolaou, M. Analysis of production history for unconventional gas reservoirs with statistical methods. SPE J. 2013, 18, 878–896. [Google Scholar] [CrossRef]
- Howard, G.C.; Fast, C.R. Hydraulic Fracturing; Henry L. Doherty Memorial Fund of AIME: Richardson, TX, USA, 1970; Volume 2. [Google Scholar]
- Palisch, T.T.; Vincent, M.; Handren, P.J. Slickwater fracturing: Food for thought. SPE Prod. Oper. 2010, 25, 327–344. [Google Scholar] [CrossRef]
- Kern, L.; Perkins, T.; Wyant, R. The mechanics of sand movement in fracturing. J. Pet. Technol. 1959, 11, 55–57. [Google Scholar] [CrossRef]
- Medlin, W.L.; Sexton, J.H.; Zumwalt, G.L. Sand transport experiments in thin fluids. In Proceedings of the SPE Annual Technical Conference and Exhibition (SPE 14469), Las Vegas, NV, USA, 22–26 September 1985. [Google Scholar]
- Woodworth, T.R.; Miskimins, J.L. Extrapolation of laboratory proppant placement behavior to the field in slickwater fracturing applications. In Proceedings of the SPE Hydraulic Fracturing Technology Conference (SPE 106089), College Station, TX, USA, 29–31 January 2007. [Google Scholar]
- Wang, J.; Joseph, D.; Patankar, N.; Conway, M.; Barree, R. Bi-power law correlations for sediment transport in pressure driven channel flows. Int. J. Multiphase Flow 2003, 29, 475–494. [Google Scholar] [CrossRef]
- Sahai, R.; Miskimins, J.L.; Olson, K.E. Laboratory results of proppant transport in complex fracture systems. In Proceedings of the SPE Hydraulic Fracturing Technology Conference (SPE 168579), The Woodlands, TX, USA, 4–6 February 2014. [Google Scholar]
- Tong, S.; Mohanty, K.K. Proppant transport study in fractures with intersections. Fuel 2016, 181, 463–477. [Google Scholar] [CrossRef]
- Chun, T.; Zhang, Z.; Mao, S.; Wu, K. Experimental Study of Proppant Transport in Complex Fractures with Horizontal Bedding Planes for Slickwater Fracturing. In Proceedings of the Unconventional Resources Technology Conference (In URTec), Denver, CO, USA, 22–24 July 2019. [Google Scholar]
- Schols, R.S.; Visser, W. Proppant bank buildup in a vertical fracture without fluid loss. In Proceedings of the SPE European Spring Meeting (SPE 4834), Amsterdam, The Netherlands, 29–30 May 1974. [Google Scholar]
- Gu, Q.; Hoo, K.A. Evaluating the performance of a fracturing treatment design. Ind. Eng. Chem. Res. 2014, 53, 10491–10503. [Google Scholar] [CrossRef]
- Hu, X.; Wu, K.; Song, X.; Yu, W.; Tang, J.; Li, G.; Shen, Z. A new model for simulating particle transport in a low viscosity fluid for fluid driven fracturing. AIChE J. 2018, 64, 3542–3552. [Google Scholar] [CrossRef]
- Patankar, N.A.; Joseph, D.D. Lagrangian numerical simulation of particulate flows. Int. J. Multiphase Flow 2001, 27, 1685–1706. [Google Scholar] [CrossRef]
- Tsai, K.; Fonseca, E.; Lake, E.; Degaleesan, S. Advanced computational modeling of proppant settling in water fractures for shale gas production. SPE J. 2012, 18, 50–56. [Google Scholar] [CrossRef]
- Blyton, C.A.; Gala, D.P.; Sharma, M.M. A Comprehensive Study of Proppant Transport in a Hydraulic Fracture. In Proceedings of the SPE Annual Technical Conference and Exhibition (SPE 174973), Houston, TX, USA, 28–30 September 2015. [Google Scholar]
- Zeng, J.; Li, H.; Zhang, D. Numerical simulation of proppant transport in hydraulic fracture with the upscaling CFD-DEM method. J. Nat. Gas Sci. Eng. 2016, 33, 264–277. [Google Scholar] [CrossRef]
- Wu, C.H.; Yi, S.; Sharma, M.M. Proppant distribution among multiple perforation clusters in a horizontal wellbore. In Proceedings of the SPE Hydraulic Fracturing Technology Conference and Exhibition (SPE 184861), The Woodlands, TX, USA, 24–26 January 2017. [Google Scholar]
- Andrews, M.J.; O’Rourke, P.J. The multiphase particle-in-cell (MP-PIC) method for dense particulate flows. Int. J. Multiphase Flow 1996, 22, 379–402. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Braatz, R. Multi-phase particle-in-cell coupled with population balance equation (MP-PIC-PBE) method for multiscale computational fluid dynamics simulation. Comput. Chem. Eng. 2020, 134, 106686. [Google Scholar] [CrossRef]
- Farias, L.; de Souza, J.; Braatz, R.; da Rosa, C. Coupling of the population balance equation into a two-phase model for the simulation of combined cooling and antisolvent crystallization using OpenFOAM. Comput. Chem. Eng. 2019, 123, 246–256. [Google Scholar] [CrossRef]
- Kwon, J.S.; Nayhouse, M.; Christofides, P.D. Multiscale, multidomain modeling and parallel computation: Application to crystal shape evolution in crystallization. Ind. Eng. Chem. Res. 2015, 54, 11903–11914. [Google Scholar] [CrossRef]
- Kwon, J.S.; Nayhouse, M.; Orkoulas, G.; Christofides, P.D. Enhancing the crystal production rate and reducing polydispersity in continuous protein crystallization. Ind. Eng. Chem. Res. 2014, 53, 15538–15548. [Google Scholar] [CrossRef]
- Mao, S.; Shang, Z.; Chun, S.; Li, J.; Wu, K. An Efficient Three-Dimensional Multiphase Particle-in-Cell Model for Proppant Transport in the Field Scale. Unconv. Resour. Technol. Conf. 2019. [Google Scholar] [CrossRef]
- Mao, S.; Siddhamshetty, P.; Zhang, Z.; Yu, W.; Chun, T.; Kwon, J.; Wu, K. Impact of Proppant Pumping Schedule on Well Production for Slickwater Fracturing. Unconv. Resour. Technol. Conf. 2020. [Google Scholar] [CrossRef]
- Zeng, J.; Li, H.; Zhang, D. Numerical simulation of proppant transport in propagating fractures with the multi-phase particle-in-cell method. Fuel 2019, 245, 316–335. [Google Scholar] [CrossRef]
- Siddhamshetty, P.; Liu, S.; Valkó, P.P.; Kwon, J.S. Feedback control of proppant bank heights during hydraulic fracturing for enhanced productivity in shale formations. AIChE J. 2017, 64, 1638–1650. [Google Scholar] [CrossRef]
- Narasingam, A.; Siddhamshetty, P.; Kwon, J.S. Temporal clustering for order reduction of nonlinear parabolic PDE systems with time-dependent spatial domains: Application to a hydraulic fracturing process. AIChE J. 2017, 63, 3818–3831. [Google Scholar] [CrossRef]
- Narasingam, A.; Siddhamshetty, P.; Kwon, J.S. Handling Spatial Heterogeneity in Reservoir Parameters Using Proper Orthogonal Decomposition Based Ensemble Kalman Filter for Model-Based Feedback Control of Hydraulic Fracturing. Ind. Eng. Chem. Res. 2018, 57, 3977–3989. [Google Scholar] [CrossRef]
- Sidhu, H.S.; Narasingam, A.; Siddhamshetty, P.; Kwon, J.S. Model order reduction of nonlinear parabolic PDE systems with moving boundaries using sparse proper orthogonal decomposition: Application to hydraulic fracturing. Comput. Chem. Eng. 2018, 112, 92–100. [Google Scholar] [CrossRef] [Green Version]
- Sidhu, H.S.; Siddhamshetty, P.; Kwon, J.S. Approximate Dynamic Programming Based Control of Proppant Concentration in Hydraulic Fracturing. Mathematics 2018, 6, 132. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Siddhamshetty, P.; Kwon, J.S. Optimal pumping schedule design to achieve a uniform proppant concentration level in hydraulic fracturing. Comput. Chem. Eng. 2017, 101, 138–147. [Google Scholar] [CrossRef]
- Siddhamshetty, P.; Wu, K.; Kwon, J.S. Optimization of simultaneously propagating multiple fractures in hydraulic fracturing to achieve uniform growth using data-based model reduction. Chem. Eng. Res. Des. 2018, 136, 675–686. [Google Scholar] [CrossRef]
- Siddhamshetty, P.; Yang, S.; Kwon, J.S. Modeling of hydraulic fracturing and designing of online pumping schedules to achieve uniform proppant concentration in conventional oil reservoirs. Comput. Chem. Eng. 2018, 114, 306–317. [Google Scholar] [CrossRef]
- Siddhamshetty, P.; Wu, K.; Kwon, J.S. Modeling and control of proppant distribution of multi-stage hydraulic fracturing in horizontal shale wells. Ind. Eng. Chem. Res. 2019, 58, 3159–3169. [Google Scholar] [CrossRef]
- Siddhamshetty, P.; Kwon, J.S. Simultaneous measurement uncertainty reduction and proppant bank height control of hydraulic fracturing. Comput. Chem. Eng. 2019, 127, 272–281. [Google Scholar] [CrossRef]
- Wen, C.Y.; Yu, Y.H. Mechanics of fluidization. Chem. Eng. Prog. Symp. Ser. 1966, 62, 100–111. [Google Scholar]
- Harris, S.E.; Crighton, D.G. Solitons, solitary waves, and voidage disturbances in gas-fluidized beds. J. Fluid Mech. 1994, 266, 243–276. [Google Scholar] [CrossRef]
- Carman, P.C. Fluid flow through granular beds. Trans. Inst. Chem. Eng. 1937, 15, 150–166. [Google Scholar] [CrossRef]
- Nolte, K.G. Determination of proppant and fluid schedules from fracturing-pressure decline. SPE Prod. Eng. 1986, 1, 255–265. [Google Scholar] [CrossRef]
- Gu, H.; Desroches, J. New pump schedule generator for hydraulic fracturing treatment design. In Proceedings of the SPE Latin American and Caribbean Petroleum Engineering Conference, Port-of-Spain, Trinidad and Tobago, 27–30 April 2003. [Google Scholar]
- Dontsov, E.V.; Peirce, A.P. A new technique for proppant schedule design. Hydraul. Fract. J. 2014, 1, 1–8. [Google Scholar]
- Siddhamshetty, P.; Bhandakkar, P.; Kwon, J.S. Enhancing total fracture surface area in naturally fractured unconventional reservoirs via model predictive control. J. Pet. Sci. Eng. 2020, 184, 106525. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 2 | |
| 4 Pa | |
| Kozeny–Carman constant (C) | 5 |
| Fracture half length | 180 m |
| Fracture height | 30 m |
| Fracture width | 0.00762 m |
| Proppant particle density () | 2648 |
| Pure fluid density | 1000 |
| Particle volume fraction at close packing () | |
| Parcels injected per second | 2500 |
| Case | AFC (md·ft) | PFSA (m2) | Cumulative Shale Gas Production Volume for 10 Years (MMft3) |
|---|---|---|---|
| Case A | 516.96 | 2282.5 | 14.87 |
| Case B | 398.42 | 2301.5 | 15.02 |
| Case C | 284.11 | 2364.5 | 14.79 |
| Case | AFC (md·ft) | PFSA (m2) | Cumulative Shale Gas Production for 10 Years (MMft3) |
|---|---|---|---|
| Case A | 516.96 | 2282.5 | 14.87 |
| Case B | 398.42 | 2301.5 | 15.02 |
| Case C | 284.11 | 2364.5 | 14.79 |
| Optimal | 457.69 | 2292 | 15.47 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddhamshetty, P.; Mao, S.; Wu, K.; Kwon, J.S.-I. Multi-Size Proppant Pumping Schedule of Hydraulic Fracturing: Application to a MP-PIC Model of Unconventional Reservoir for Enhanced Gas Production. Processes 2020, 8, 570. https://doi.org/10.3390/pr8050570
Siddhamshetty P, Mao S, Wu K, Kwon JS-I. Multi-Size Proppant Pumping Schedule of Hydraulic Fracturing: Application to a MP-PIC Model of Unconventional Reservoir for Enhanced Gas Production. Processes. 2020; 8(5):570. https://doi.org/10.3390/pr8050570
Chicago/Turabian StyleSiddhamshetty, Prashanth, Shaowen Mao, Kan Wu, and Joseph Sang-Il Kwon. 2020. "Multi-Size Proppant Pumping Schedule of Hydraulic Fracturing: Application to a MP-PIC Model of Unconventional Reservoir for Enhanced Gas Production" Processes 8, no. 5: 570. https://doi.org/10.3390/pr8050570
APA StyleSiddhamshetty, P., Mao, S., Wu, K., & Kwon, J. S. -I. (2020). Multi-Size Proppant Pumping Schedule of Hydraulic Fracturing: Application to a MP-PIC Model of Unconventional Reservoir for Enhanced Gas Production. Processes, 8(5), 570. https://doi.org/10.3390/pr8050570