2.2.1. Infrared Image-Enhancement Algorithm
This paper proposes an enhancement method for local mapping. The method includes three steps. First, the image is filtered by Gaussian filtering to obtain the base layer of the image, and the base layer is subtracted from the input image to calculate the detail layer. Then, adaptive histogram segmentation and dynamic compression are performed, respectively, on the base layer and the detail layer. Finally, the two layers of images are fused at different scales and exported as an 8-bit grayscale image. A Gaussian filter is used to smooth the output image. In this paper, the Gaussian-filtering algorithm is used to divide the infrared image into the base-layer image and the detail-layer image, and the process is as follows.
Among them, is the base layer image, is the original infrared image, ⊗ is the convolution operation, G is the Gaussian kernel, and is the detail-layer image. There is different information contained in the base image and the detail image and they need to be processed differently. The basic information in the base-layer image has high contrast and obvious grayscale changes. The detailed information in the detail-layer image mainly has low contrast. There are often traces of gas leakage in the detail layer.
There are few pixels with extreme gray values in detail-layer images. They are often recognized as noise. The image quality would be improved by removing these noises. A large amount of detail weak noise is separated into the detail layers after the image layering operation. To remove noise, the detail layer must be filtered a second time.
For a given image
I, the probability distribution (probability distribution function, PDF) of each gray level can be expressed as the formula (
3)
where
represents the PDF value of grayscale
k,
is the number of occurrences of grayscale
k, and
L is the total number of pixels in the image: for 8-bit images,
L is 256.
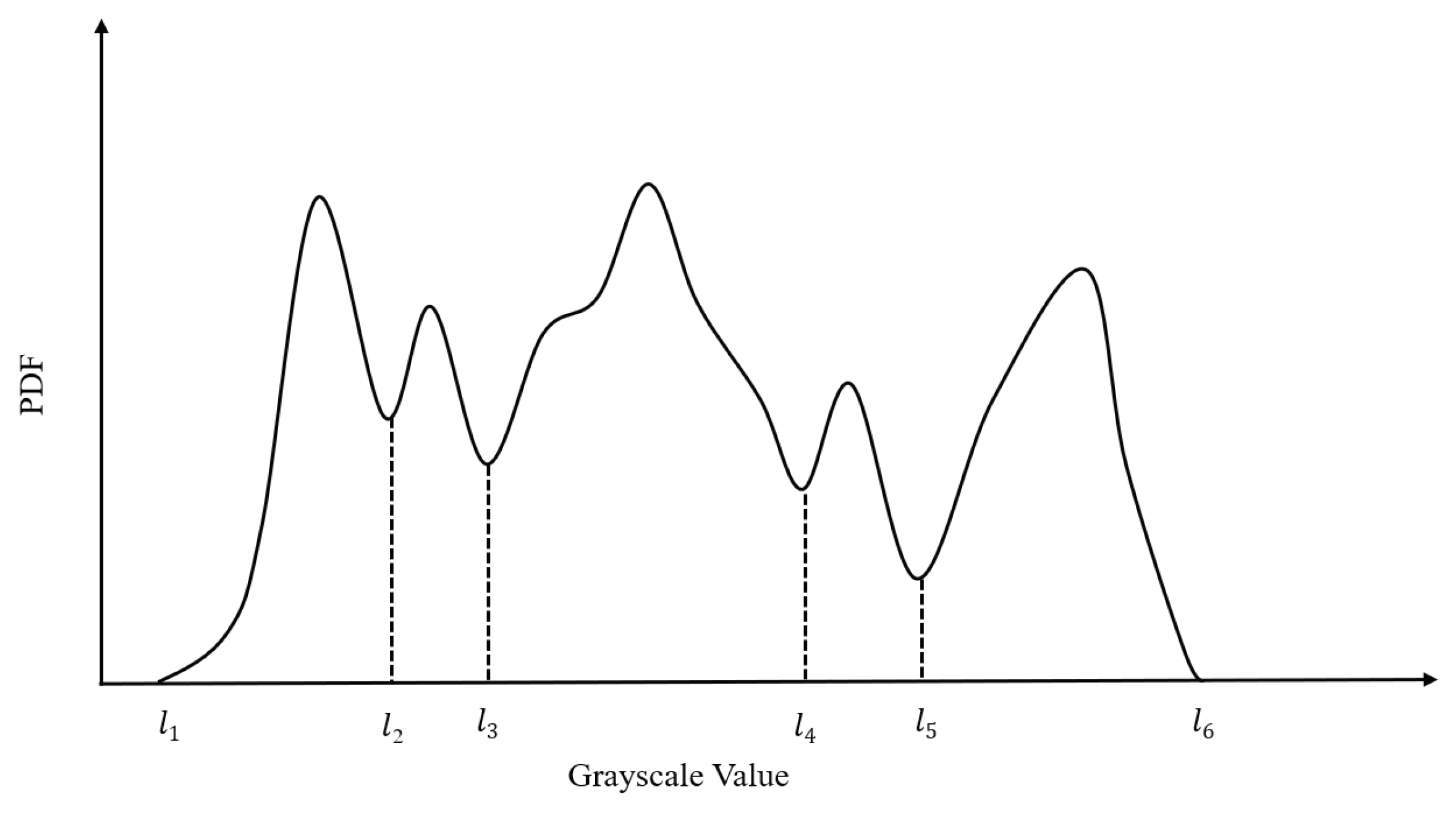
The local minimum of the histogram gray distribution are determined by a sliding window of size
. The grayscale set is
. The
N is the number of local minima. The first and last non-zero histogram components are also contained in the set. Finally, the grayscale histogram is divided into
intervals, which can be expressed as
, as shown in
Figure 3.
The gray level in each interval is regarded as one or a group of objects, and the gray redistribution strategy of each interval is carried out. It is unreasonable to redistribute grayscales based only on the PDF values of a single grayscale. The overall grayscale distribution of the interval would be considered to determine the foreground or background. Based on the above characteristics, AHV is used as the criterion, which represents the average histogram value of a certain grayscale interval, such as Equation (
4):
In the formula, is the AHV value of the i interval, is the sub-histogram interval of the cumulative density function (CDF), and the set . For a large flat area, its corresponding grayscale is usually concentrated in a small grayscale range, and the AHV should also be large. The larger the flat area, the larger the AHV. For those objects that contain a lot of detail, it is obvious that their AHV will be small because the detail part has a large grayscale range and a small pixel-PDF value.
The Otsu method [
13] was used to calculate the appropriate background recognition threshold
. Assuming that
divides the set
into two classes,
and
, then
is defined as (
6):
In the formula, and represent the proportions of the two categories and in the population, and are the average of these two categories, and is the average of . When takes the maximum value, is the optimal threshold. After the threshold is confirmed, the grayscale interval is remapped. First, only sub-histograms with AHV values below the threshold are enhanced, other sub-histograms maintain their proportions across the dynamic range. Second, replacing the PDF of a single gray level with the accumulation of sub-histograms is a key factor in gray level redistribution.
The remapping rule of the sub-histogram interval of the background part is as follows (
7)
where
T is the number of non-zero sub-histogram components. Since the foreground part needs to be enhanced, the sub-histogram interval mapping rule of the foreground part is as follows (
8)
After assigning the dynamic range of each sub-histogram, each gray level can be mapped to the specified dynamic range. The HE method is used for the non-background sub-histogram, and the linear stretch is used for the background sub-histogram. The algorithm adaptively divides the histogram into several sub-histograms, and then enhances each sub-histogram according to its AHV, and the generated image is not affected by amplified background noise.
The base image is dynamically compressed to reduce the gray scale. The base image is compressed by a gamma curve to keep its gray level within a reasonable range. The processed background layer and detail layer are fused at different fusion ratios, such as formula (
9).
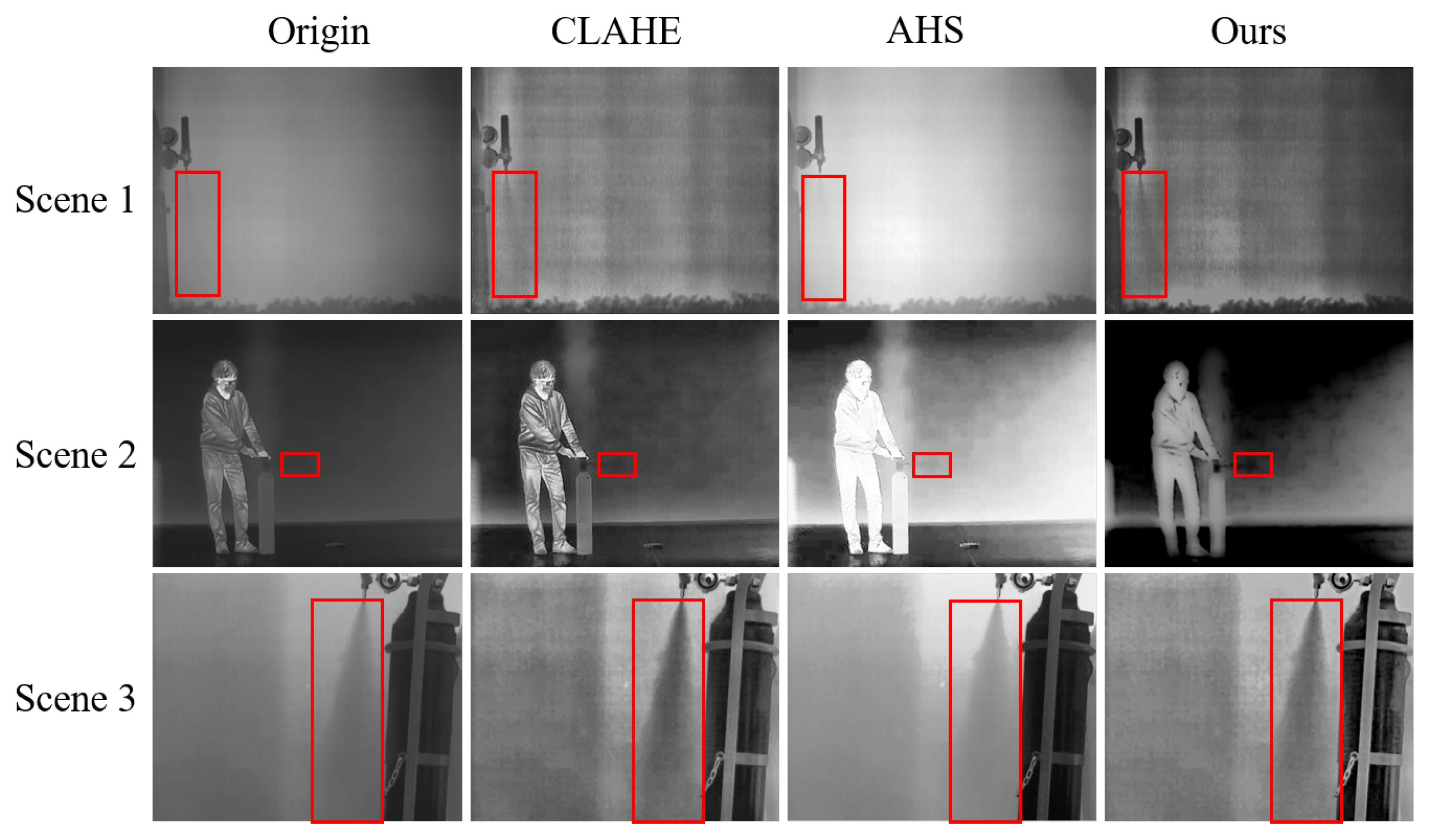
The algorithm can effectively enhance the gas part and significantly improve the overall contrast of the image, which is convenient for the human eye to observe the gas leakage event and the subsequent processing of the image. In the quantitative evaluation, the average gradient AG, image information entropy IE and enhancement degree EME introduced above are selected to evaluate the image-enhancement performance of this algorithm. Generally speaking, the larger the three indicators, the better. It can be seen from
Table 2 that the average gradient of the algorithm in this paper after the enhancement of the three scenes is close to the CLAHE algorithm, but significantly higher than the AHS (adaptive histogram segmentation) algorithm; the information entropy of the picture is improved compared with the CLAHE algorithm; the enhancement degree EME is significantly higher than the AHS algorithm.Comparison of infrared image-enhancement algorithm results are showed in
Figure 4.
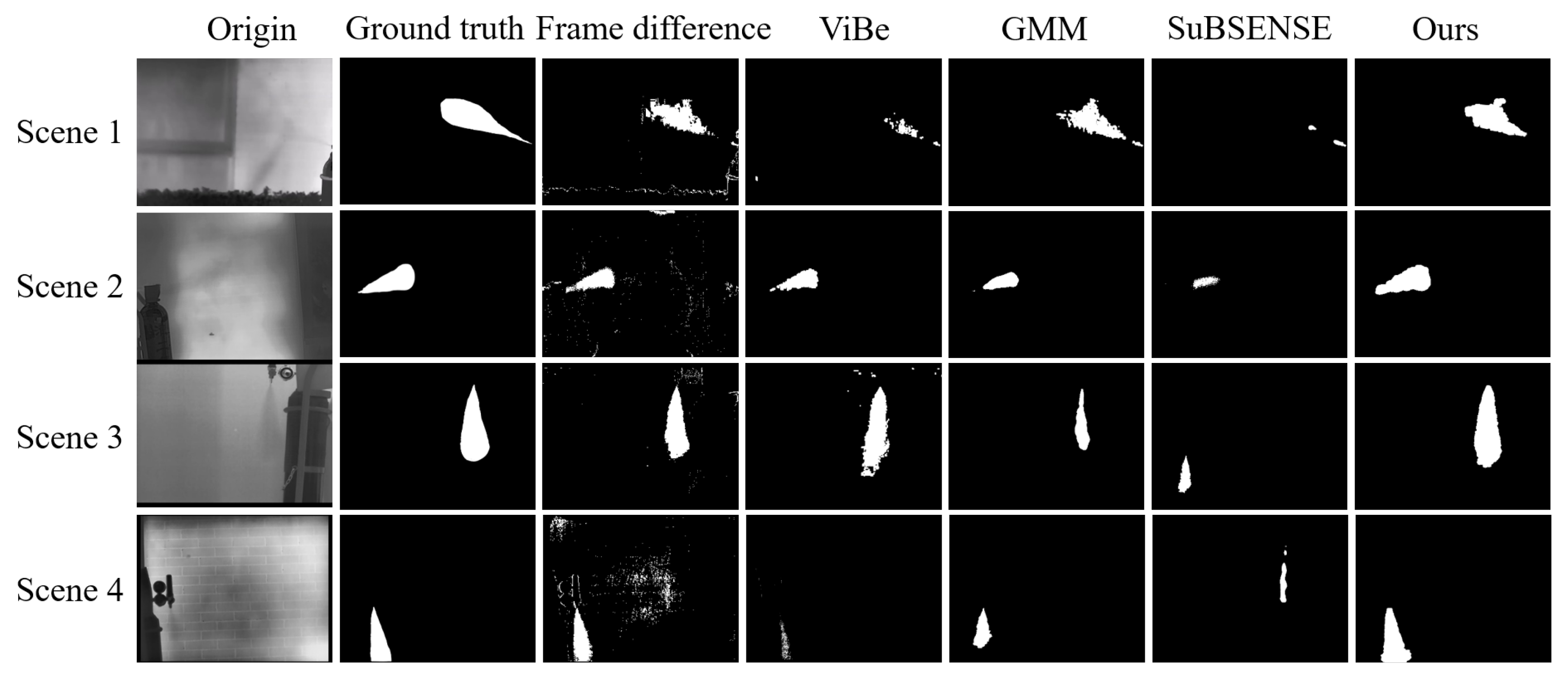
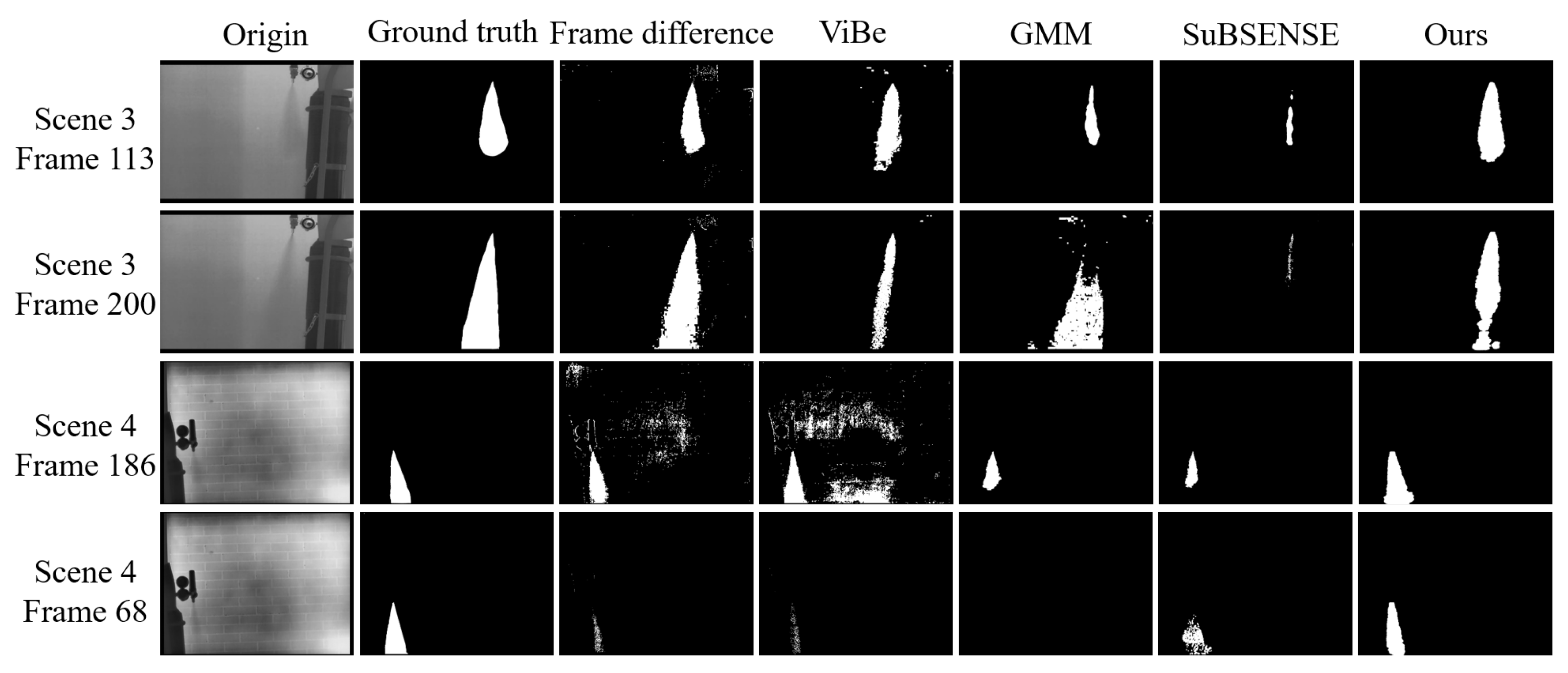
2.2.2. Gas-Leak Area-Detection Algorithm
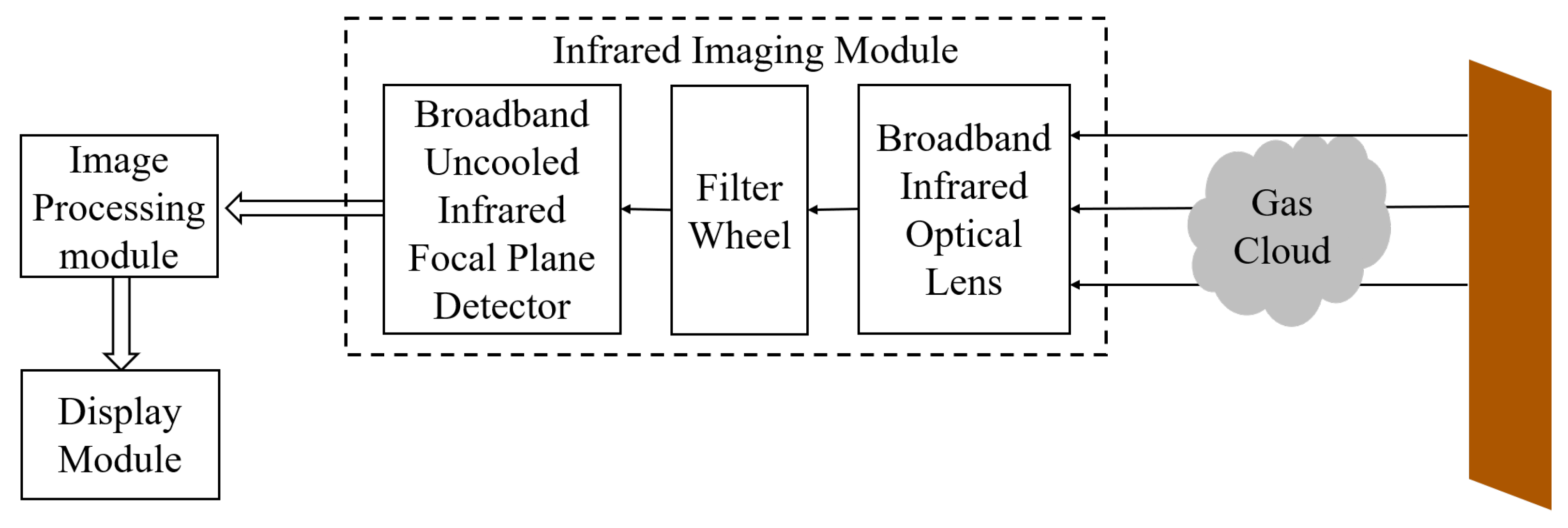
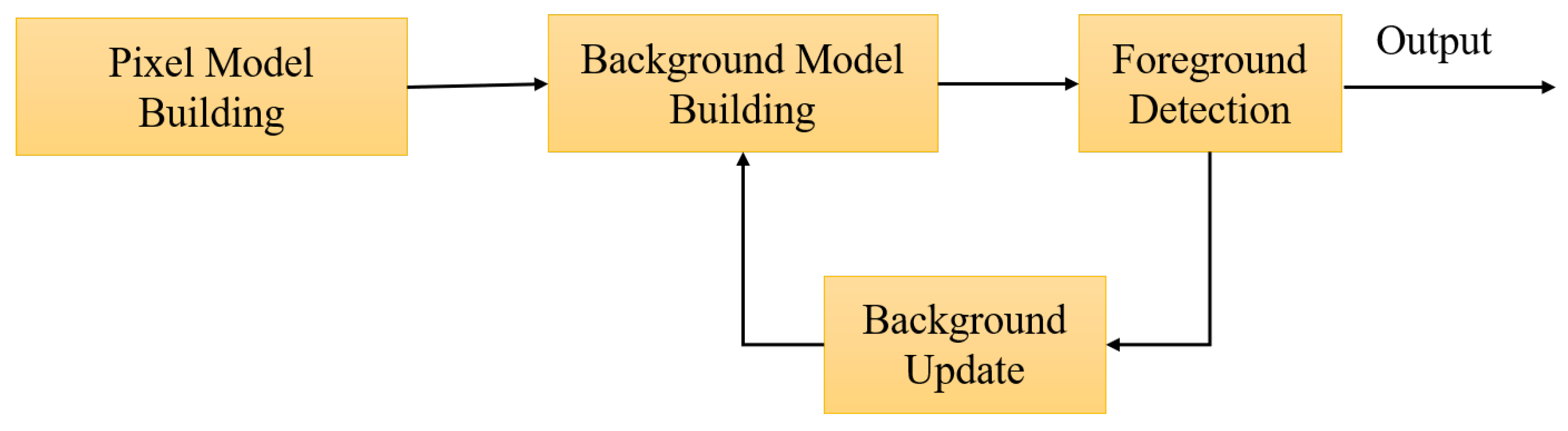
The leaking gas presents motion characteristics in the infrared video stream, and the gas leaking area can be located by the relevant algorithm. The ViBe (visual background extractor) algorithm was proposed by Olivier in 2009. The algorithm is a pixel-based foreground-extraction algorithm with excellent processing effect and high efficiency. Its important feature is the automatic update decision of the background mode, which randomly selects the pixels to be automatically updated, and then randomly selects the neighboring pixels to start the automatic update. When the pattern of an image change cannot be predicted, the random-update strategy can simulate the uncertainty of image change to a certain extent. The main processing flow of the algorithm is shown in
Figure 5.
Classical background-extraction algorithms, such as the Gaussian background modeling algorithm [
14], need to estimate the probability density function of pixels as information for subsequent judgments. The ViBe algorithm only needs sample values to construct a pixel model. Assuming that the pixel value of a pixel in the image is
, a pixel model sample set
is established for this pixel, such as the formula (
10) shown.
Among them,
represents the background sample value with index
i in the sample set, and
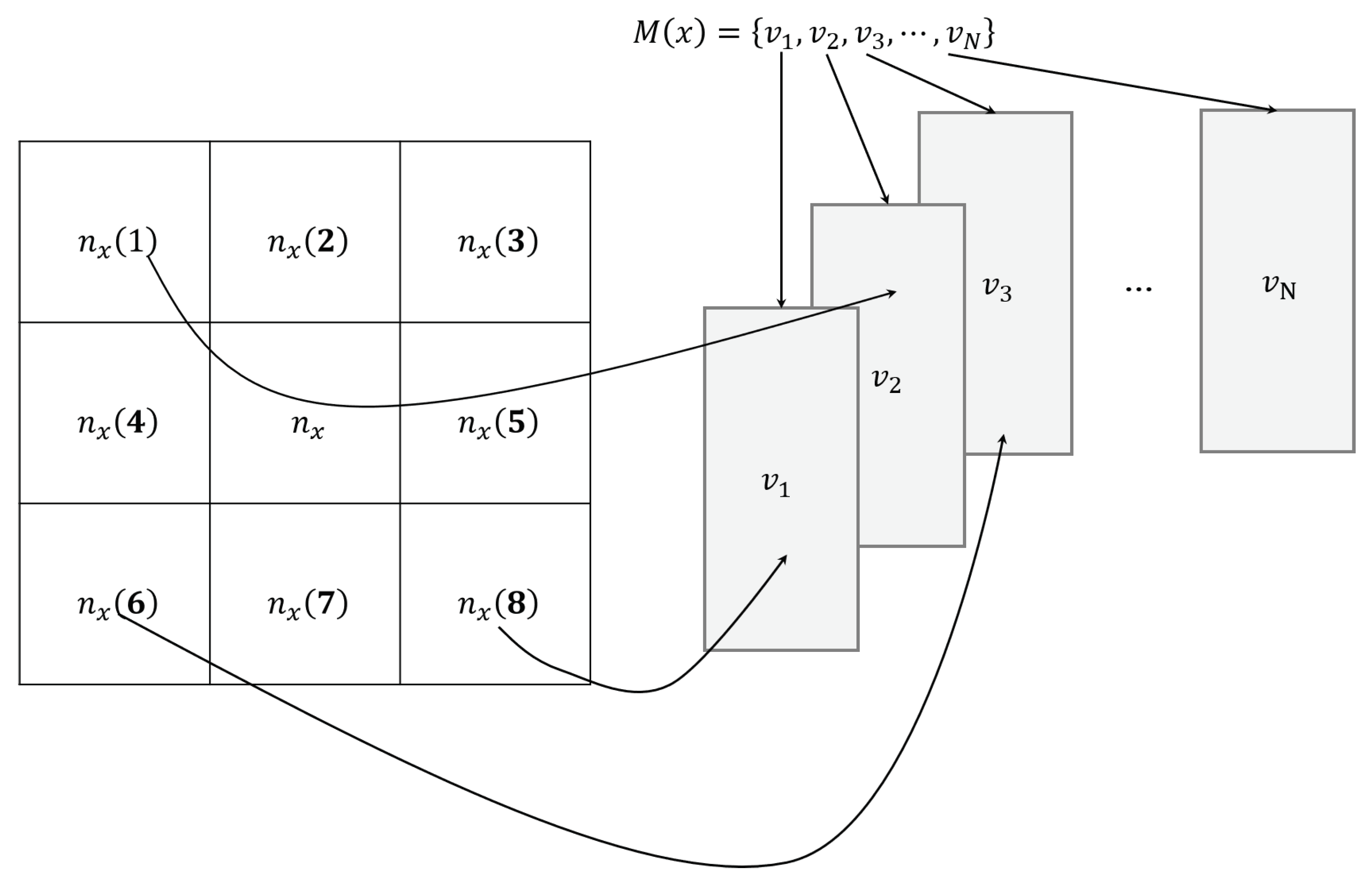
N represents the size of the sample set. When initializing the background model, ViBe only needs one frame of image. When the background model is first established, the pixel values in the eight neighborhood
are randomly selected with the same probability to construct the background model, and the number of selections is
N. It solves the problem of insufficient samples in the process of background establishment, and can establish a background model according to a frame of an image. The construction process of the background sample set is shown in
Figure 6.
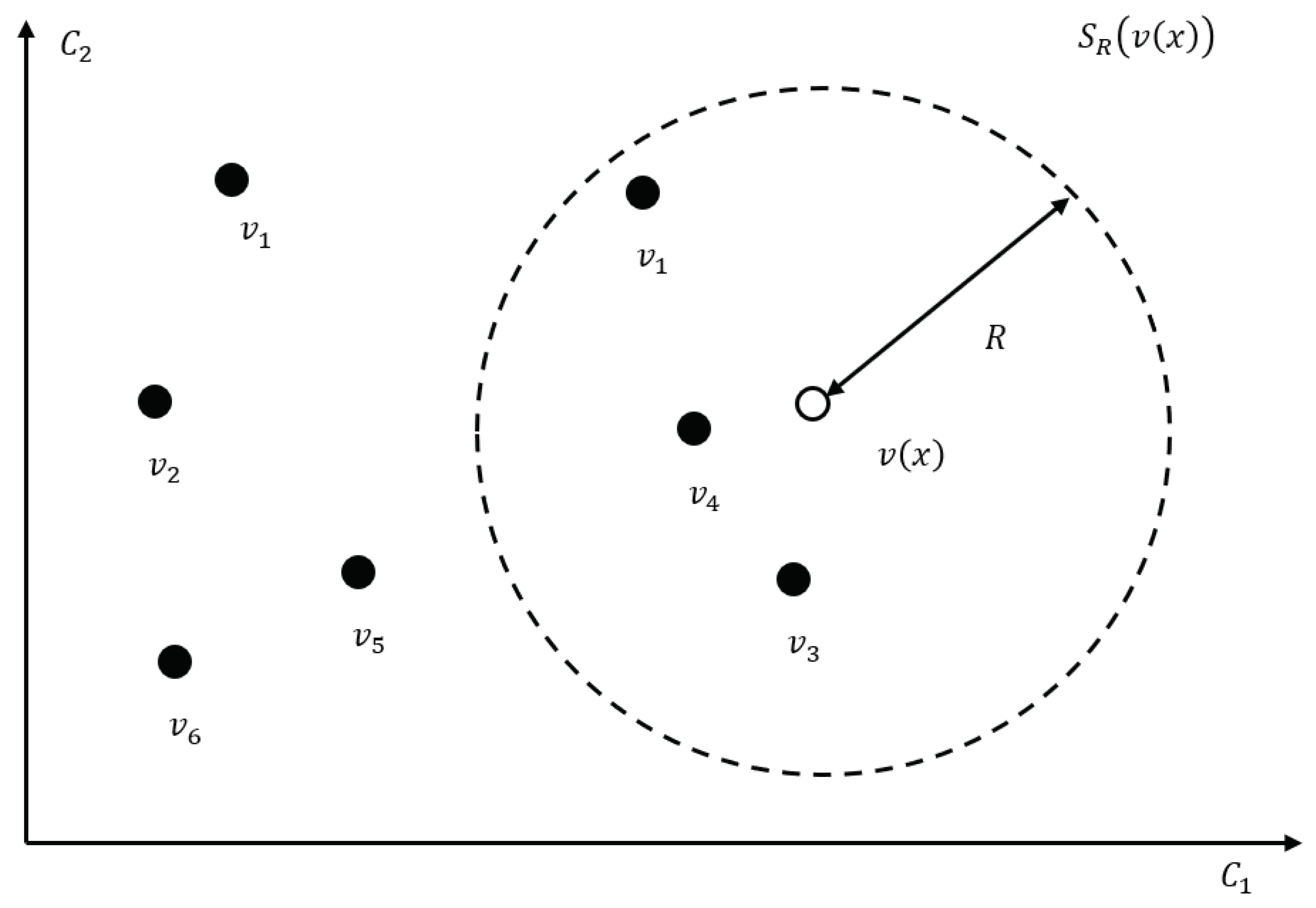
After completing the construction of the background model, the pixels are classified according to the
corresponding to the pixels, and whether the pixel is the foreground is determined. With
as the center, a circle
with a radius of
R is drawn, each sample in the sample set is traversed one by one, and it is judged whether the sample point according to the Euclidean distance between the sample and the center falls within the circle
, then, the number of sample points within the circle
is counted. Next, the threshold
is set, and the sizes of
and the threshold
are compared, if
is greater than the threshold value, the pixel is the foreground, otherwise it is the background.
Figure 7 shows the relevant process of pixel foreground detection.
The radius R of the circle and the threshold are two key parameters in the ViBe algorithm. The algorithm works better when and . In the foreground matching process, once the min match is found, the classification work of this pixel is interrupted, which can effectively improve the computational efficiency.
As the image sequence changes, the background model must be updated periodically in order to cope with new objects appearing in the scene. In the traditional background model calculation, the newly established background model is also discarded or reconstructed due to the increase in time. The result is that the information contained in the existing background model is wasted and the computational difficulty and workload are increased. ViBe adds two update strategies: foreground pixel count and random sampling during the update process. When detecting each frame of anR image, each foreground pixel is marked and counted, and the problem of long-term stationary after the appearance of a moving object is solved by the strategy of counting foreground pixels.
For background pixels, an update strategy combining memoryless update, temporal random sampling and spatial neighborhood update is adopted in the update process. First, the random replacement principle is used for the model samples. The probability of the samples being replaced is the same, so that the sample value develops in a smooth life cycle, and the probability of the sample value in the sample set is guaranteed to decay monotonically. Second, the temporal sampling update strategy extends the time covered by the background pixel model. Finally, in order to improve the spatial unity, the mechanism of row space propagation is added.
When updating the background model of the pixel point, as shown in
Figure 8, a sample value of the sample set is randomly replaced, and the samples to be discarded are randomly selected, and the probability of each sample being discarded is equal. Since the sample set of the background model contains
N samples, the probability of a sample being retained at time
t is
, and the probability that the sample is retained after the algorithm runs for a period of time is as follows (
11):
The formula (
12) indicates that the expected retention time of each sample in the background model decays exponentially. If there is a sample in the background model at time
t, the sample will be stored at time
. The probability of being changed is independent of time
t, i.e., no memory update feature. For the update of the dynamic background model, the memoryless update strategy method is convenient and effective.
The time sampling update strategy refers to updating the background model according to the probability. Due to the periodicity of the background in the image, selecting some of the image frames at a random time in the video stream to update can enhance the robustness of the background model and increase the update cycle of the sample. When a pixel is judged to belong to the background, assuming that the current time sampling factor is , the probability of this pixel being selected for updating is .
The target of the leaking gas cloud in the infrared image is weak, and the random thermal noise in the shooting has a great influence on the target detection accuracy. Therefore, when the background model is automatically updated, it needs to be more tolerant of noise. The background model of the ViBe algorithm can be initialized in a single frame, and the foreground can be judged from the second frame, so that the background model can be quickly established and suitable for multi-spectral gas-leakage systems.The target of the leaking gas cloud in the infrared image is weak, and the random thermal noise in the shooting has a great influence on the target detection accuracy. Therefore, when the background model is automatically updated, it needs to be more tolerant of noise. The background model of the ViBe algorithm can be initialized in a single frame, and the foreground can be judged from the second frame, so that the background model can be quickly established and suitable for multi-spectral gas leakage systems.
When initializing the model, the algorithm only relies on a single frame to build a background model, which is prone to random noise, which affects the detection of weak targets such as gas clouds.
There is a correlation between a pixel and its neighboring pixels in the spatial domain, and at the same time, there is a correlation with the pixels of the adjacent frames in both the temporal and spatial domains. This paper proposes an improved background-model building method based on the association of image sequences in the video in the time domain and the pixel space propagation mechanism in the spatial domain, which improves the robustness of the background model and better suppresses random noise.
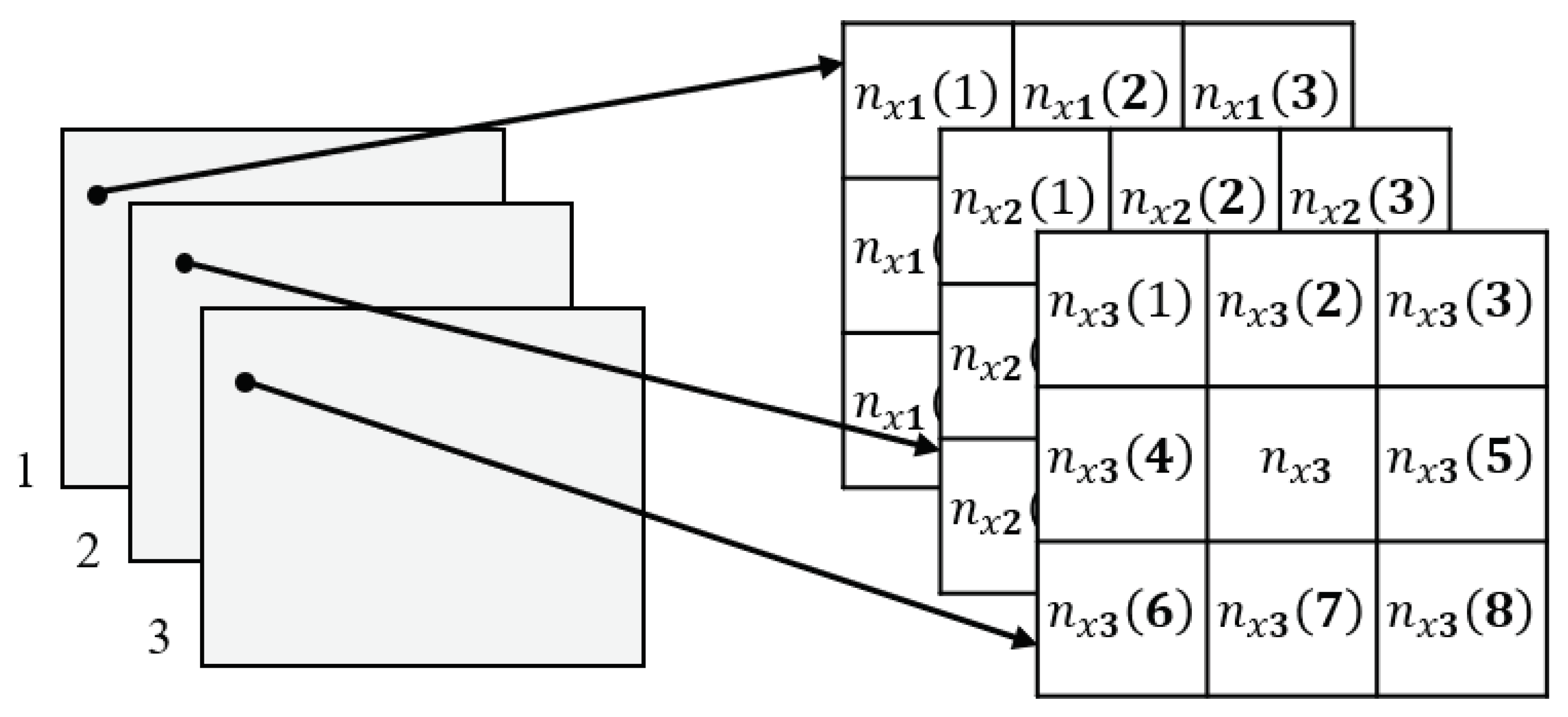
The establishment process of the background model is shown in
Figure 9. When the background model is first established, the pixel values in the eight neighborhoods
in the initial three frames are randomly selected with the same probability to construct the background model, the number of times of selection is
N. Take a certain pixel
as an example, the pixel point establishes a pixel model sample set
is randomly selected from
.
The neighborhood pixels of pixels in three consecutive frames of images in the time domain are added to the sample set, which enriches the sample set and reduces the interference of some random noise compared to the previous single-frame background. The selection range of samples is expanded from 8 neighborhoods to 24 neighborhoods, which also avoids the selection of repeated samples and improves the applicability of the background sample set. The establishment of the initial model in three frames has little effect on the timeliness of the algorithm, which is almost negligible. The improved method makes full use of the characteristics of similar distribution of adjacent pixels and random distribution of noise in time series, which not only solves the problem of insufficient samples in the process of background establishment, but also reduces the interference of randomness of independent samples, and increases the robustness of the background initialization model.
In this paper, the radius
R of the circle
is improved by the maximum inter-class variance method. The maximum inter-class variance method calculates the inter-class variance between the background and foreground regions, Confirm whether the decision threshold
value is the best division value. As can be seen from the previous section, based on the radius
R value of the circle
, it can be judged that a certain pixel is a foreground point or a background point, so that all pixels are divided into two categories: background and foreground. Assuming that based on the current distance threshold
R, the proportion of pixels in the foreground area in the entire image is
, the average value of the foreground part is
, and the background area accounts for
. The ratio is
, the average value of the background area is
, and the average value of all pixels in the current image is
, then the class of the foreground part and the background part. The inter-variance can be expressed as the formula (
13):
The larger the value of , the better the segmentation effect between the foreground and the background. When is the largest, the R at this time is the optimal distance threshold. In order to prevent the influence of light mutation, the threshold size needs to be limited. The automatic threshold method is used to update the different thresholds of each scene, which can increase the accuracy of the algorithm for gas-leakage identification in different scenes, and reduce the false-alarm rate at the same time.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}