2.1. One-Dimensional Framework
The discrete formulation already presented elsewhere [
8,
9,
11] is summarized to give its main characteristics. It is based on established principles: (i) the principle of equivalence between gravitational and inertial effects; (ii) the Galilean principle of velocity relativity; (iii) the equivalence between energy and mass resulting from special relativity; and (iv) the Helmholtz–Hodge decomposition of a vector into one divergence-free component and another curl-free.
The geometric structure on which the derivation of the equation of motion is performed is one-dimensional in space. The classic representation of the vectors of space within a global frame of reference is abandoned in favor of a local frame of reference where all interactions are defined from cause to effect. It is a rectilinear segment limited at its ends by two points a and b, thus introducing a characteristic length named discrete horizon with reference to the distance traveled by a wave of celerity c during a time interval or ; in mechanics, the celerity c is simply the longitudinal velocity of sound . The segment is oriented by a unit vector carried by it. The scalar variables such as the pressure are attached to the points of the segment , while the vectors acceleration, velocity or displacement are located on this one where they are considered as constant. In one dimension of space, they are vectors or scalars on the oriented segment and in the multidimensional case they are also defined on as a component of the vector of space whose knowledge is not required. At no time is the notion of a space vector required, only knowing the components on different segments would make it possible, if necessary, to represent the vector in a n-dimensional space. Similarly, the notion of tensor of order equal to greater than two is no longer useful. The framework of the mechanics of continuous media is abandoned as well as that of the derivation at a point, the mathematical analysis, etc.
The starting point of the discrete formulation is the interpretation of the principle of weak equivalence which states that the effects of a gravitational field are identical to the effects of an acceleration. The observation of the equality between the inertial mass and the gravitational mass on the law of dynamics
for
leads to deleting the moving mass
m to get an equality between accelerations,
. Discrete mechanics postulates that this law can be extended to any other acceleration, any kind of nature:
where
is the intrinsic acceleration of the material medium or of a particle with or without mass and
is the sum of all the accelerations applied to it on the segment
.
The essential difference on the interpretation of the principle of equivalence of Galileo as well as the principles which result from it adopted by the discrete mechanics is that the mass is a separate notion from that of acceleration. In other words, they should not be associated. Mass is a nonessential quantity; it can be replaced by energy or rather by energy per unit mass. Indeed, within all the quantities of physics which depends on mass, this one intervenes only with order 1, 0 or −1; thus, it is possible to define equivalent quantities per unit of mass, for example the force per unit of mass is an acceleration. If we define the total energy per unit of mass
as the sum of the kinetic energy and the potential energy, its difference between the points
a and
b is written:
The relation (
1) appears as the fundamental law of dynamics but also as the conservation of total energy. The second member of this equation
represents the sum of all the accelerations which are applied to the material medium; in the absence of a source term, the acceleration is zero and the velocity is a constant on the segment
which satisfies the Galilean principle of relativity. In fact, a uniform translational movement cannot be perceived by the material environment; discrete mechanics extends this principle to uniform rotational motion [
9]. The calculation of the current velocity
at the instant
t must be carried out from its value at the instant
by the upgrade
. Similarly, the displacement on
is obtained by
.
In one dimension of space, the law of dynamics is expressed from the intrinsic acceleration
and the acceleration applied,
; the latter can be written as deriving from a scalar potential
:
The scalar potential is defined only on the ends of the segment . Although both sides of this equation are vectors, they only represent their projections on . The operator ∇ will continue to represent one of the components of the gradient vector even in dimensions equal to or greater than two. The potential is associated to various phenomena: gravity, capillary effects, rotation effects, etc.
2.2. Extension to Other Space Dimensions
The extension to several dimensions of space is achieved by the construction of a discrete geometric structure based on the association of segments by their ends. Three segments build a triangular planar surface, but the planar polygonal surface can be generated from
n segments; the collection of
n segments forming the surface
is named
.
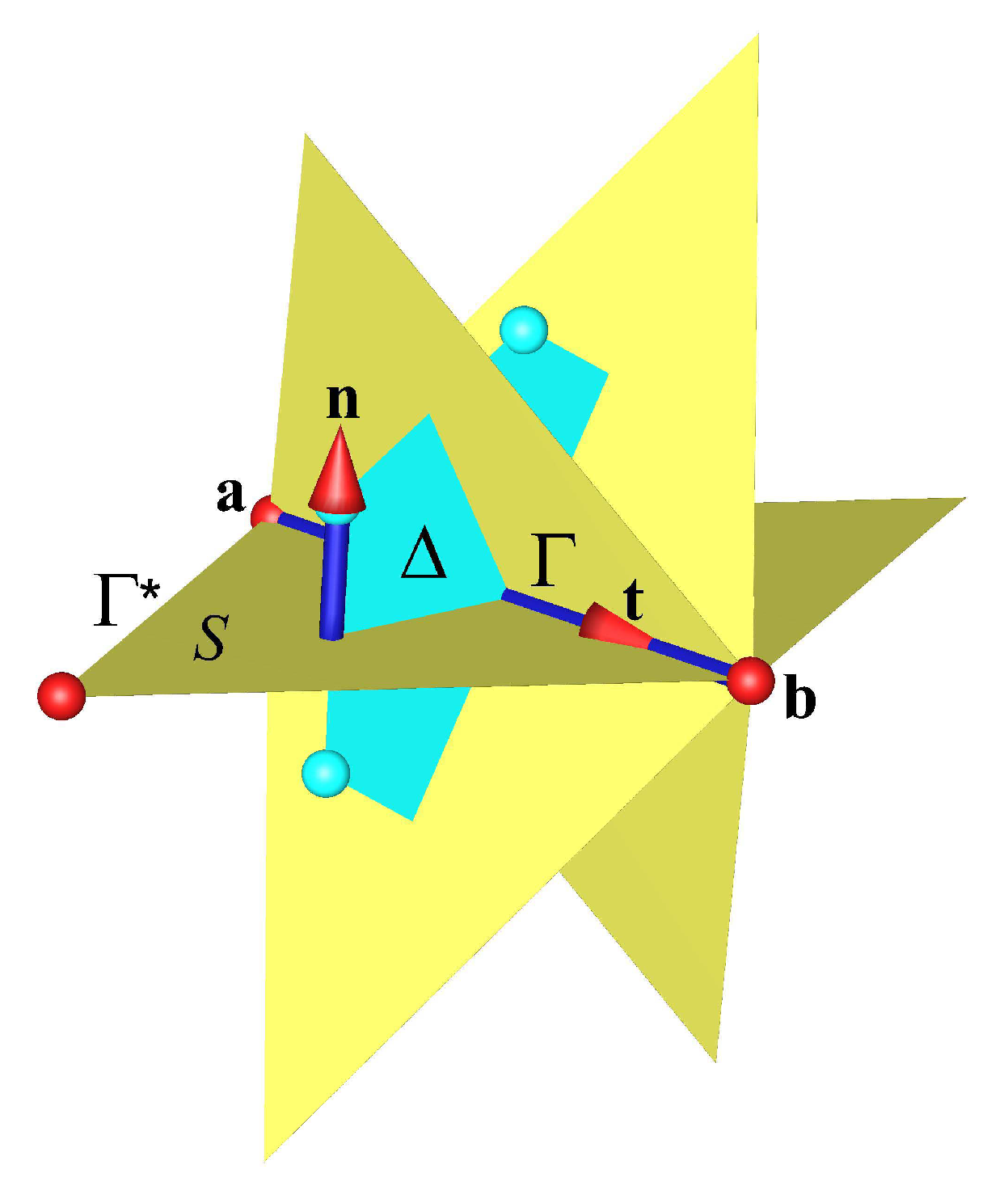
Figure 1 shows the geometric structure made up of the different facets
having the principal segment
in common.
Each facet has a normal orthogonal to the direction of the unit vector , . This set forms the local frame of reference whose position and directions in three-dimensional space are undefined. The changes of frames of reference of classical mechanics are no longer possible, the interactions from one segment to another are cause and effect, from the modification of the common scalar potential located on a vertex. This extension is limited to the creation of a polyhedral structure without any particular privileged direction, in particular the notion of volume is not necessary for the derivation of an equation of motion.
However, it should be considered that the only scalar potential
is not sufficient to characterize the intrinsic acceleration
. Indeed, the velocities on contour
create a curl carried by the normal
to the facet
; this axial vector
associated with that of all the other facets having the segment
in common makes it possible to calculate a circulation on the contour of the dual surface
passing through the barycenters of the facets. This dual curl is carried by the segment
, thus defining a second contribution to the intrinsic acceleration
:
The second contribution is orthogonal to the first because they cannot combine, they simply add up; exchanges between the two contributions are only possible if the acceleration
is not zero. This observation is in line with J.C. Maxwell’s idea on the dynamic role of electromagnetic interactions [
15]. Equation (
4) is a formal Helmholtz–Hodge decomposition of the acceleration. The third harmonic term at the same time with divergence-free and curl-free does not exist here because it corresponds to the uniform translational and rotational movements immediately eliminated by the operators in accordance with the principle of relativity. The intrinsic acceleration
has a particular status; it is the only quantity that can be considered as absolute. As we perceive the direct actions represented by
and induced by
are entangled, in several dimensions of space one does not exist without the other, one is the dual of the other. The classical interactions of electromagnetism between direct currents and induced currents are exactly the same in mechanics. The formulation has a certain number of properties in particular the global and local orthogonality of the terms in gradient and in dual curl. The discrete operators mimic some properties of the continuous operators
and
whatever the polygonal geometric structure, polygonal or polyhedral, structured or unstructured.
In discrete mechanics time runs smoothly from an instant
to the current instant
. There is no dilatation of time interval
no more than contraction of the lengths, these quantities are independent of the otherwise relative velocity. Relativistic effects are taken into account in completely different ways. The state of the system is completely defined at the instant
from scalar and vector potentials of the acceleration,
and
. The derivation of the discrete equation of motion therefore requires calculating the acceleration
at the current state by the law (
4).
2.3. Equations of Discrete Formulation
The calculation of the current potentials
and
must be modeled by the introduction of increments
and
dependent on the velocity
on each segment. The potentials
and
are called retarded potentials with reference to the Liénard–Wichert [
16] potentials of electromagnetism. The acceleration then becomes
. The modeling of these terms, which given previously in [
17], make it possible to write the discrete equation of motion in the form:
where
and
are the longitudinal and transverse celerities; these quantities measured experimentally must simply be known. The source term
here characterizes the other contributions to the modification of acceleration, gravitational effects, capillary effects, etc. The ⟼ symbol corresponds to an upgrade from time
to time
t. The quantities
and
are the attenuation factors of the longitudinal and transverse waves. In the case of a fluid, the shear stresses are relaxed in a very short time, of the order of
, and the attenuation factor
is then close to unity; a fluid does not retain the memory of the shear. On the contrary, an elastic solid medium has a zero attenuation factor
and the transverse waves persist for a very long time. In the general case, the two factors
and
are arbitrary.
The retarded potentials
and
are expressed in
or energies per units of mass. System upgrades (
5) correspond to the accumulation of compression and rotation energies and are also written in the form:
The equation of discrete motion of system (
5) is also a law of conservation of energy per unit mass. This consists of two Lagrangians where the kinetic and potential energies are exchanged separately for compression and shear. The interactions between the effects of compression and shear, on the other hand, can only be achieved by modifying the acceleration. The discrete formulation is a continuous memory model; the knowledge of the potentials at the instant
and of the velocity
makes it possible to resume the forecast of the next state at any time.
Equation (
5) makes it possible to investigate various problems of mechanics, the incompressible or compressible fluid flows, the mechanics of elastic solids or of media having complex constitutive laws but also the couplings with other phenomena such as thermal diffusion. The formulation lends itself to simulations carried out at all time scales, the product
for the longitudinal effects or
for the transverse effects indeed allow to take into account the characteristic scale of the phenomenon independently of its celerities. The treatment of a fluid is exactly the same as for a solid, only the physical characteristics
are modified. The formulation is perfectly suited to fluid–structure interaction with large deformations.
2.4. Inertia on Discrete Formulation
The resolution of the system (
5) is essentially unsteady, although it can be used to obtain a stationary solution if it exists by adopting a very large time interval in order to ensure
0. It is thus advisable to express the acceleration starting from the derivative in time and the nonlinear terms. These terms differ significantly from those of classical mechanics which are written in the form
or
or
. In discrete mechanics, inertial acceleration takes the form of a Helmholtz–Hodge decomposition [
9]:
If the gradient term of the inertial potential
is the same as with continuous media, the last term is a true dual curl. Applying the divergence operator to the equation of motion eliminates this term, which is not the case in the mechanics of continuous media. In some cases, it is possible to pass the term in gradient of the inertial potential in the second member to reveal the potential of Bernoulli,
. The solution of the velocity problem does not depend on the scalar potential used and this operation makes it possible to reduce the discretization errors, in particular for turbulent flows where inertia plays an important role. Writing in the form (
7) of inertia makes it possible to make this equation of motion completely symmetrical thanks to the Helmholtz–Hodge decomposition by making possible the regrouping of the terms in gradient and in dual curl.
2.5. Reduction to Waves Equation
The strong coupling between the shear stresses defined by
and compression represented by
necessarily passes through the acceleration
. Indeed, the two operators gradient and dual curl are orthogonal and cannot directly exchange energy. We can show that the vector Equation (
5) is a wave equation. Consider the special case where
and apply the Leibniz calculus formula:
By using the definition of the displacement
, we obtain a form which contains the retarded potentials at the second member:
The first member of this equation is a d’Alembertian
:
In solid mechanics, the celerities
and
are generally of the same order of magnitude but not equal. The system (
5) generalizes the wave propagation equation, in a homogeneous medium or in a vacuum in the case of electromagnetism, to any medium, fluid or solid with complex constitutive laws and for anisotropic media. In the general case, the celerities depend on other variables such as temperature, time or of course the constraints themselves. For fluids, the transverse celerity
can be considered as zero because the relaxation times of the shear stresses are very short, of the order of
s; the shear stress takes the instantaneous value
where
is the kinematic viscosity. The value of the attenuation factor
of the transverse waves is then equal to the unit. At very low time constants, the fluid behaves as a solid of celerity
, which makes it possible to remove the paradox of the Stokes equation where, for an imposed shear, the stress is infinite at the initial time.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




