
Real-Time Simulation of Parameter-Dependent Fluid Flows through Deep Learning-Based Reduced Order Models


Abstract
:1. Introduction
- The extraction of relevant flow features, such as recirculation regions or boundary layers through convolutional neural networks (CNNs) [24].
- The setting of closure models to stabilize a POD-Galerkin ROM [31] by using, e.g., recurrent neural networks (RNNs) to predict the impact of the unresolved scales on the resolved scales [32], or correction models to adapt a ROM to describe scenarios quite far from the ones seen during the training stage [33].
- The reconstruction of a high-resolution flow field from limited flow information [34] as well as the assimilation of flow measurements and computational flow dynamics models derived from first physical principles. This task can be cast in the framework of the so-called physics-informed neural networks [35,36], where NNs are trained to solve supervised learning tasks while respecting the fluid dynamics equations, or tackled by means of Bayesian neural networks [37].
2. Methods
2.1. Projection-Based ROMs: Main Features
- A Galerkin projection onto the RB space built through the POD procedure above does not ensure the stability of the resulting ROM (in the sense of the fulfillment of an inf–sup condition at the reduced level). Several strategies can be employed to overcome this issue such as, e.g., (a) the augmentation of the velocity space by means of a set of enriching basis functions computed through the so-called pressure supremizing operator, which depends on the divergence term; (b) the use of a Petrov–Galerkin (e.g., least squares, (LS)) RB method, or (c) the use of a stabilized FOM (such as, e.g., a P1-P1 streamline upwind Petrov–Galerkin (SUPG) finite element method); (d) an independent treatment of the pressure, to be reconstructed from the velocity by solving a Poisson equation, in the case divergence-free velocity basis functions, are used—an assumption that might be hard to fulfill.
- The need for dealing with both a mixed formulation and a coupled FSI problem requires the construction of a reduced space for each variable, no matter if one is interested in the evaluation of output quantities of interest only involving a single variable. For instance, even if one is interested in the evaluation of fluid velocity in the FSI case, a projection-based ROM must account for all the variables appearing as unknowns in the coupled FSI problem. The same consideration also holds in the case of a fluid problem, where the pressure must be treated as an unknown of the ROM problem even if one is not interested in its evaluation.
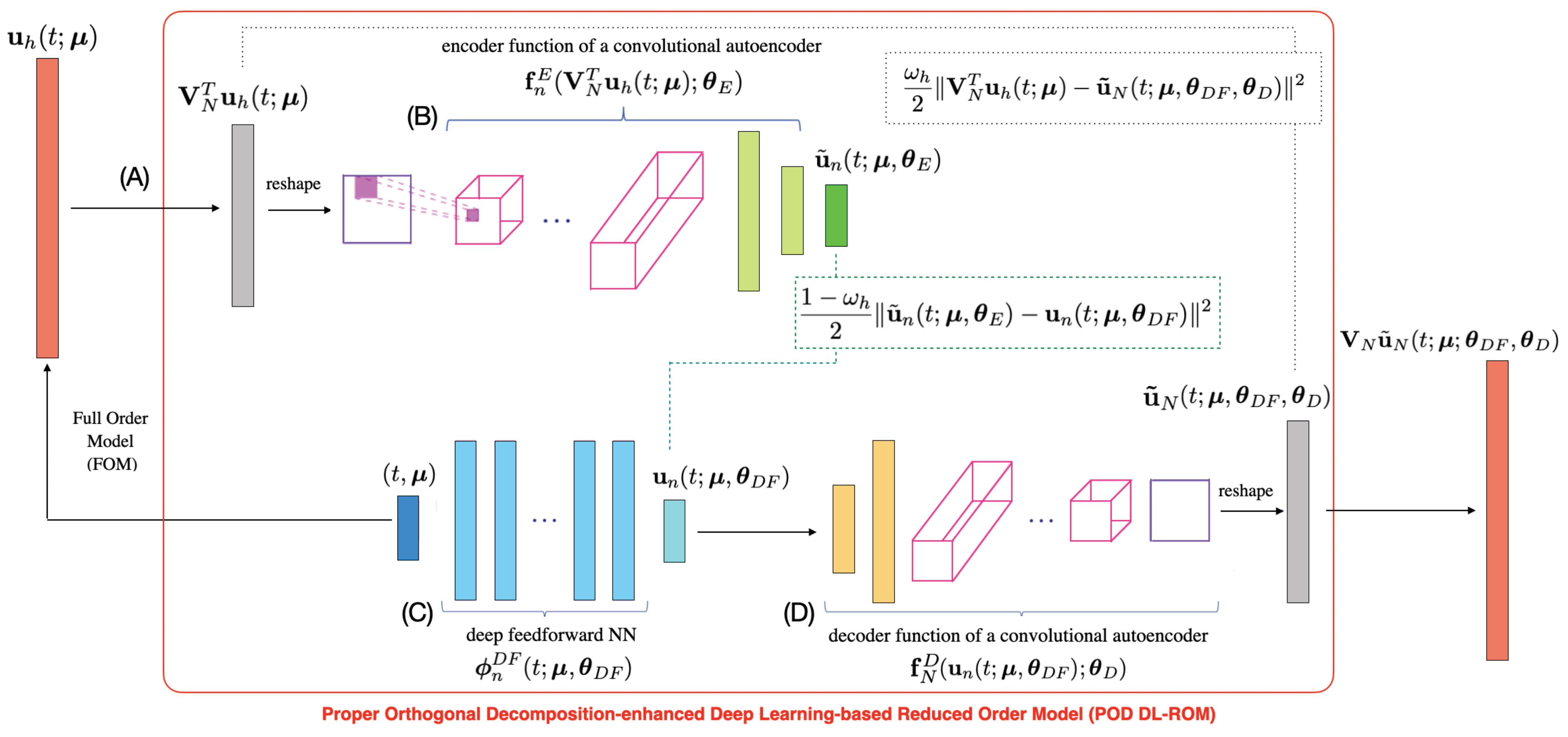
2.2. POD-Enhanced DL-ROMs (POD-DL-ROMs)
- Reduced dynamics learning. To describe the system dynamics on the nonlinear trial manifold , the intrinsic coordinates of the approximation are defined aswhere is a DFNN consisting of the repeated composition of a nonlinear activation function, applied to a linear transformation of the input multiple times. Here, denotes the DFNN parameters vector, collecting the weights and biases of each of its layers;
- Nonlinear trial manifold learning. To model the reduced nonlinear trial manifold , we employ the decoder function of a convolutional autoencoder (CAE), that is,where denotes the decoder function of a CAE obtained as the composition of several layers (some of which are convolutional), depending upon a vector collecting all the corresponding weights and biases.
3. Results
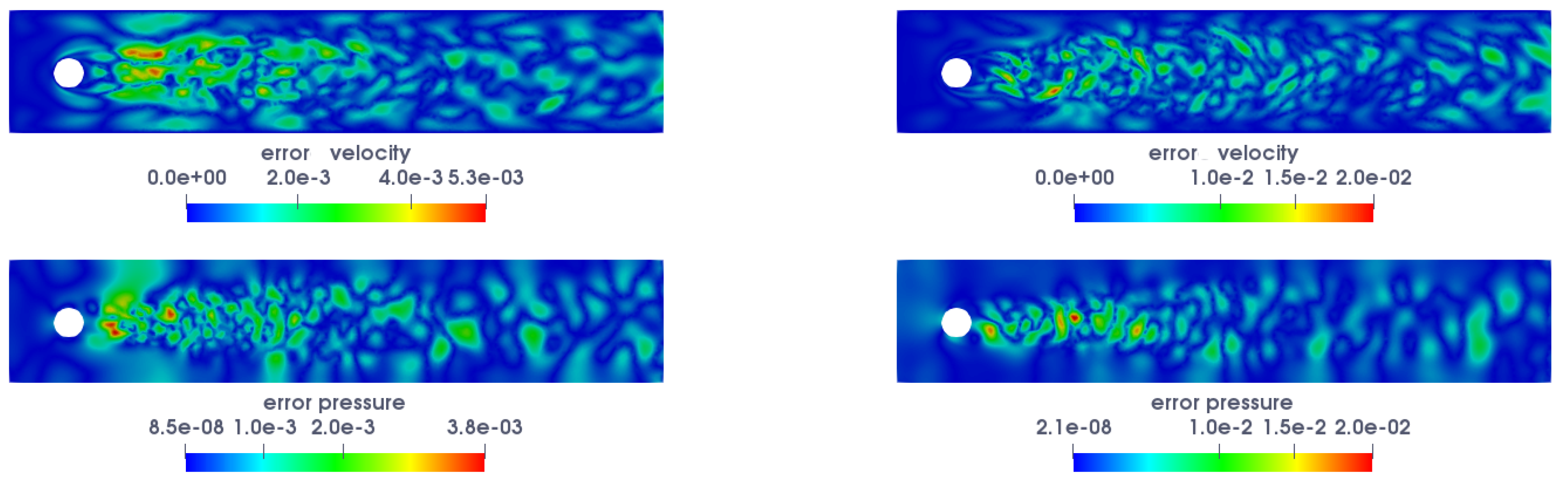
- the error indicator given by
- the relative error , for , defined as
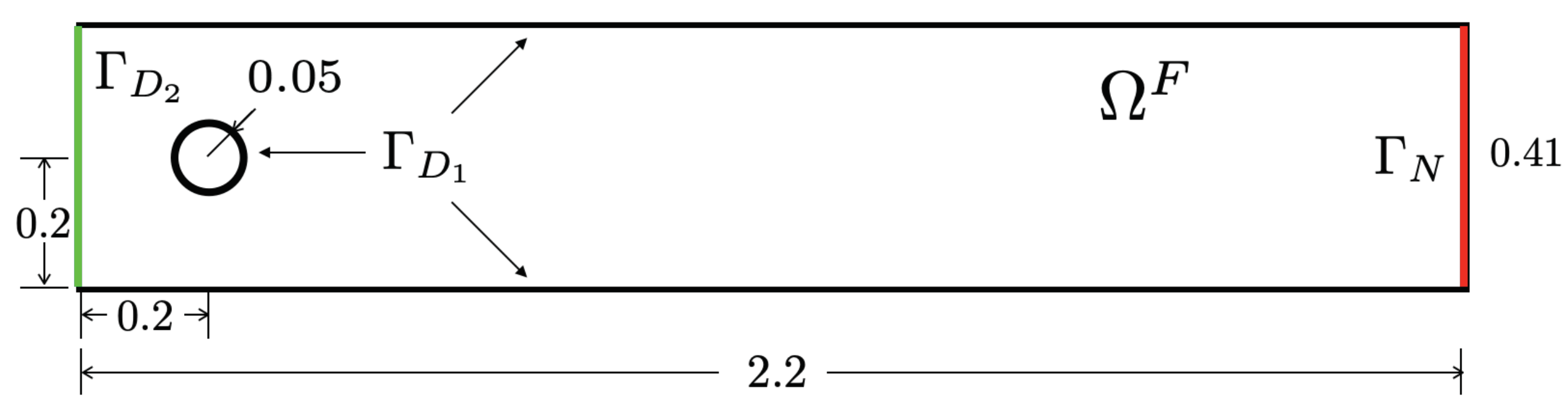
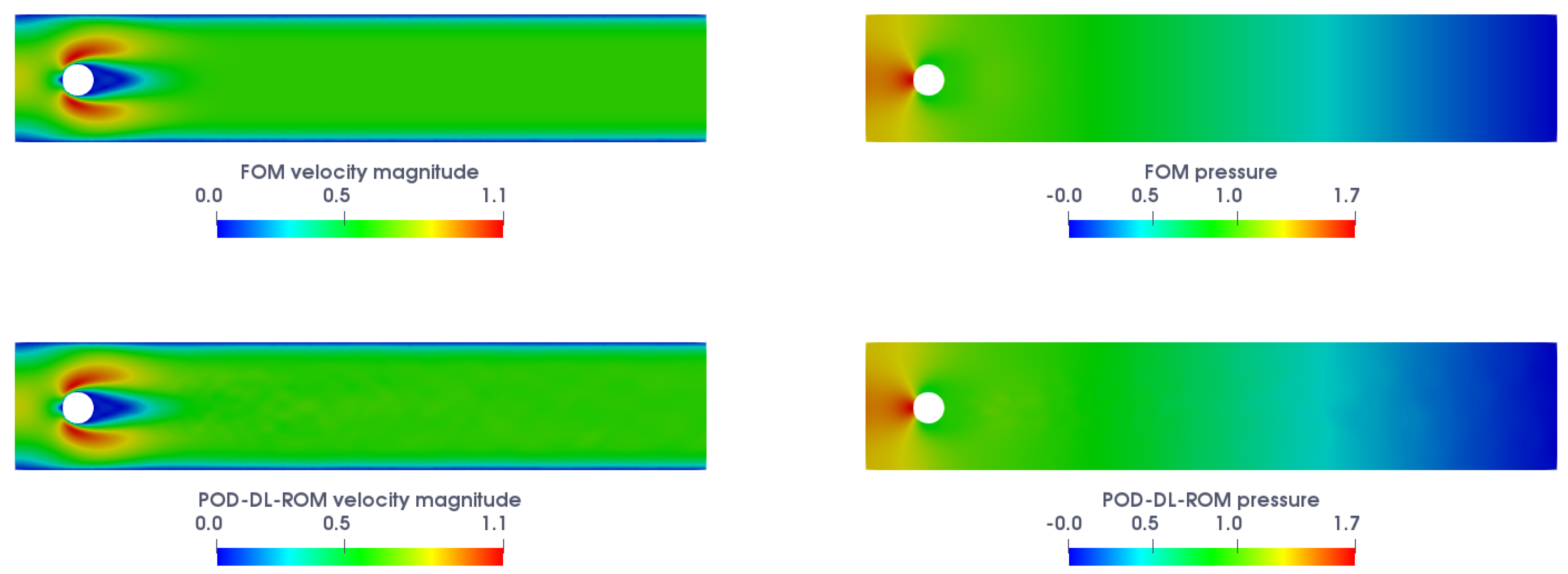
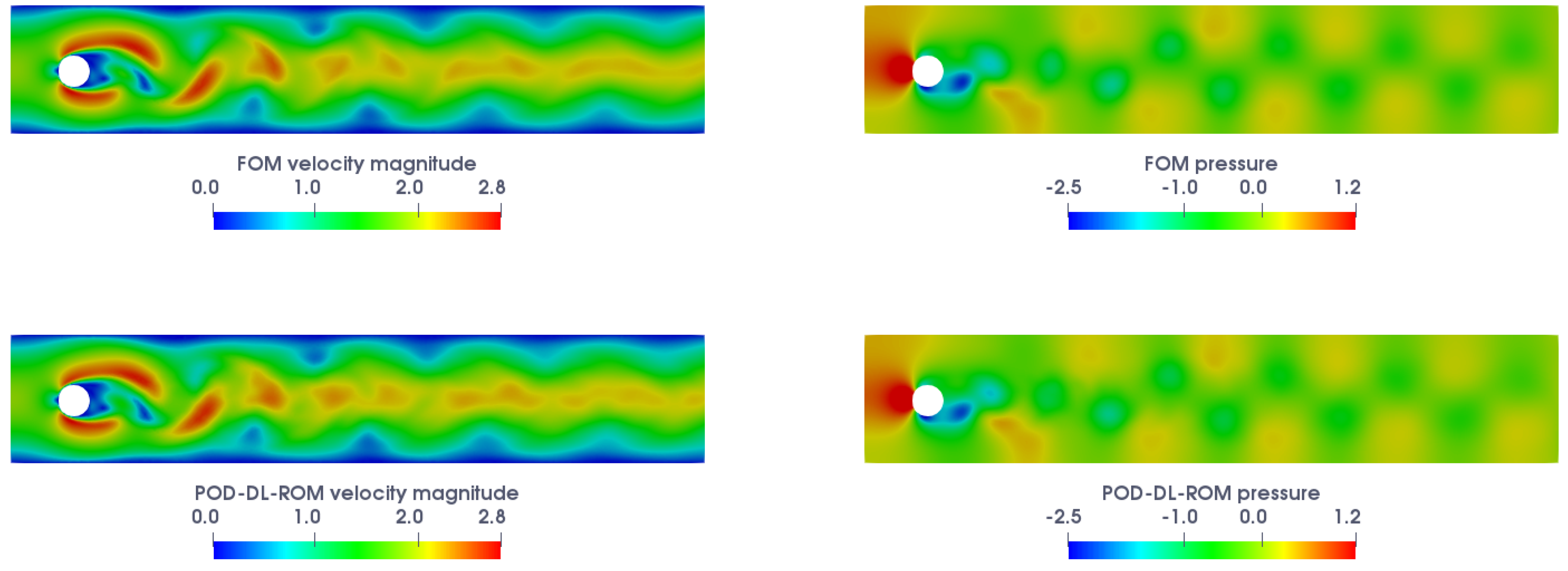
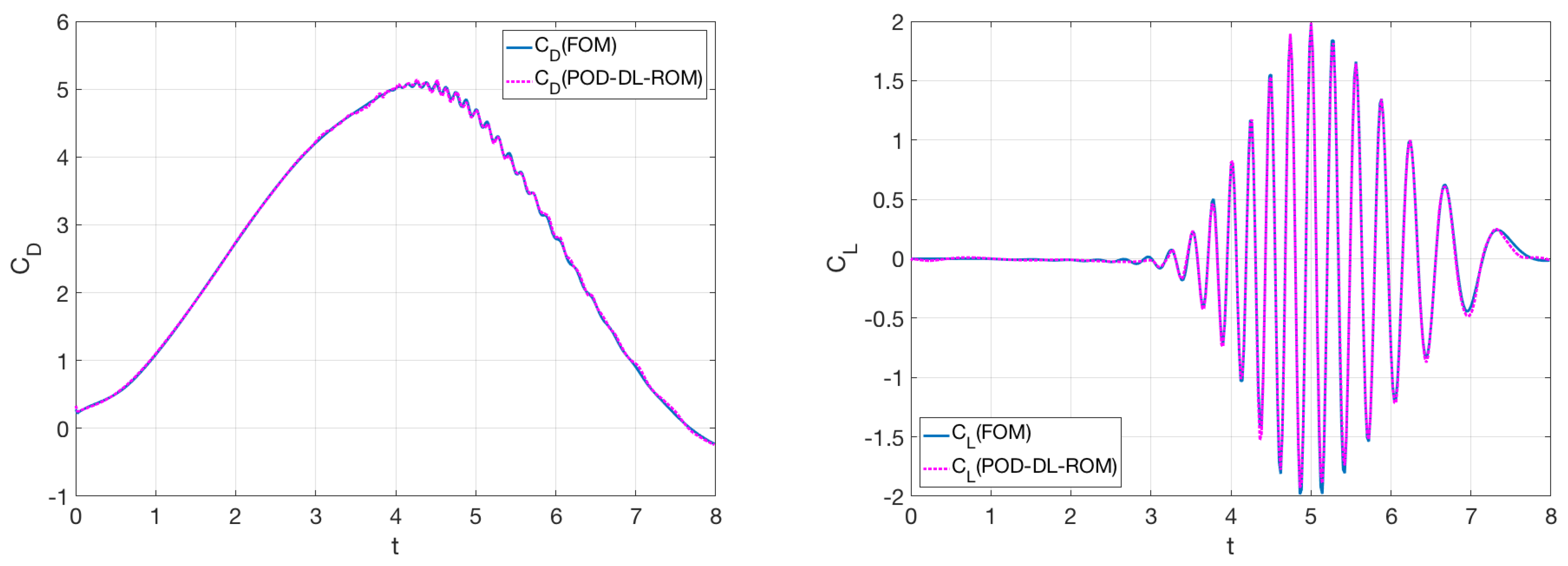
3.1. Test Case 1: Flow around a Cylinder
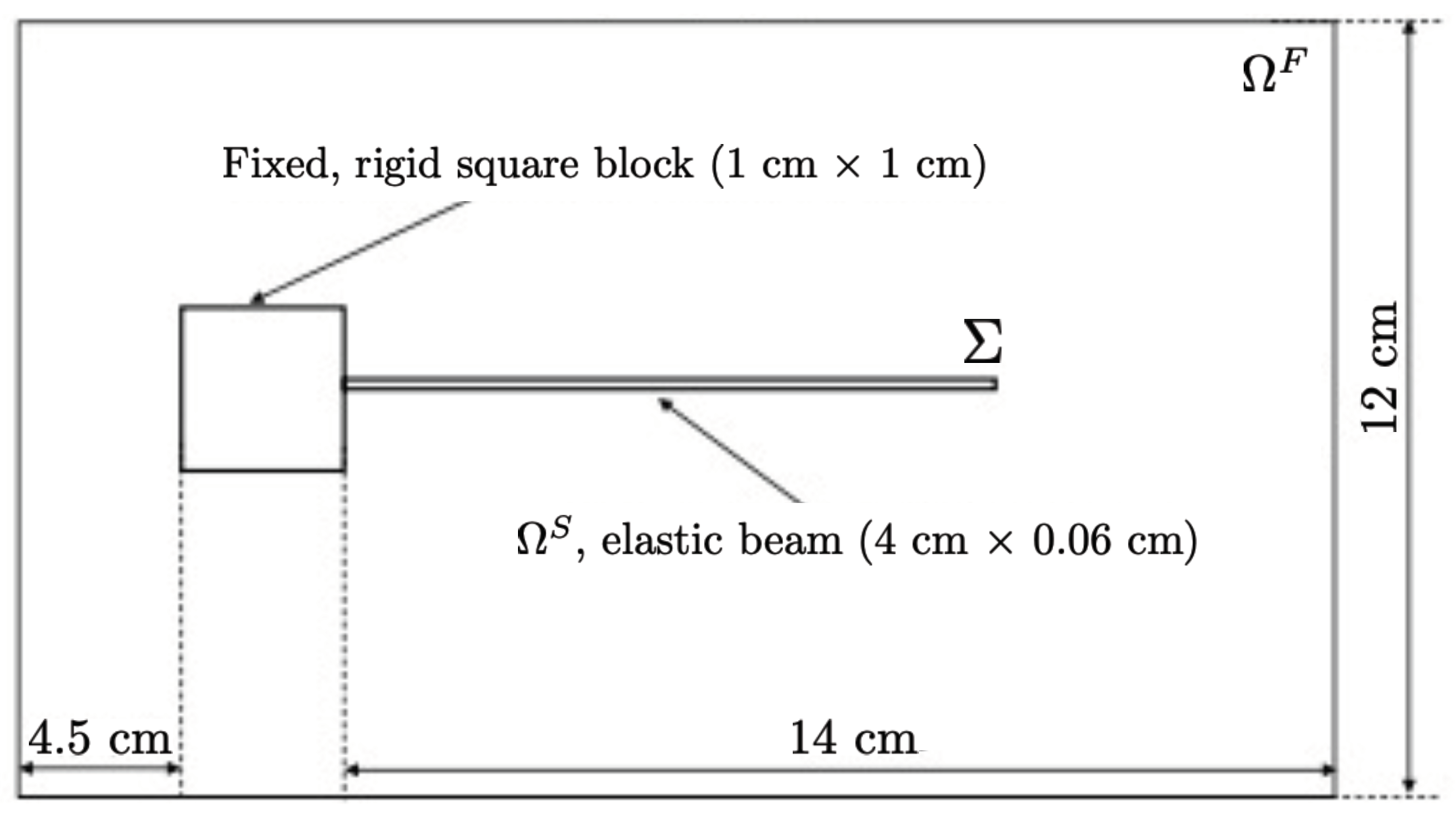
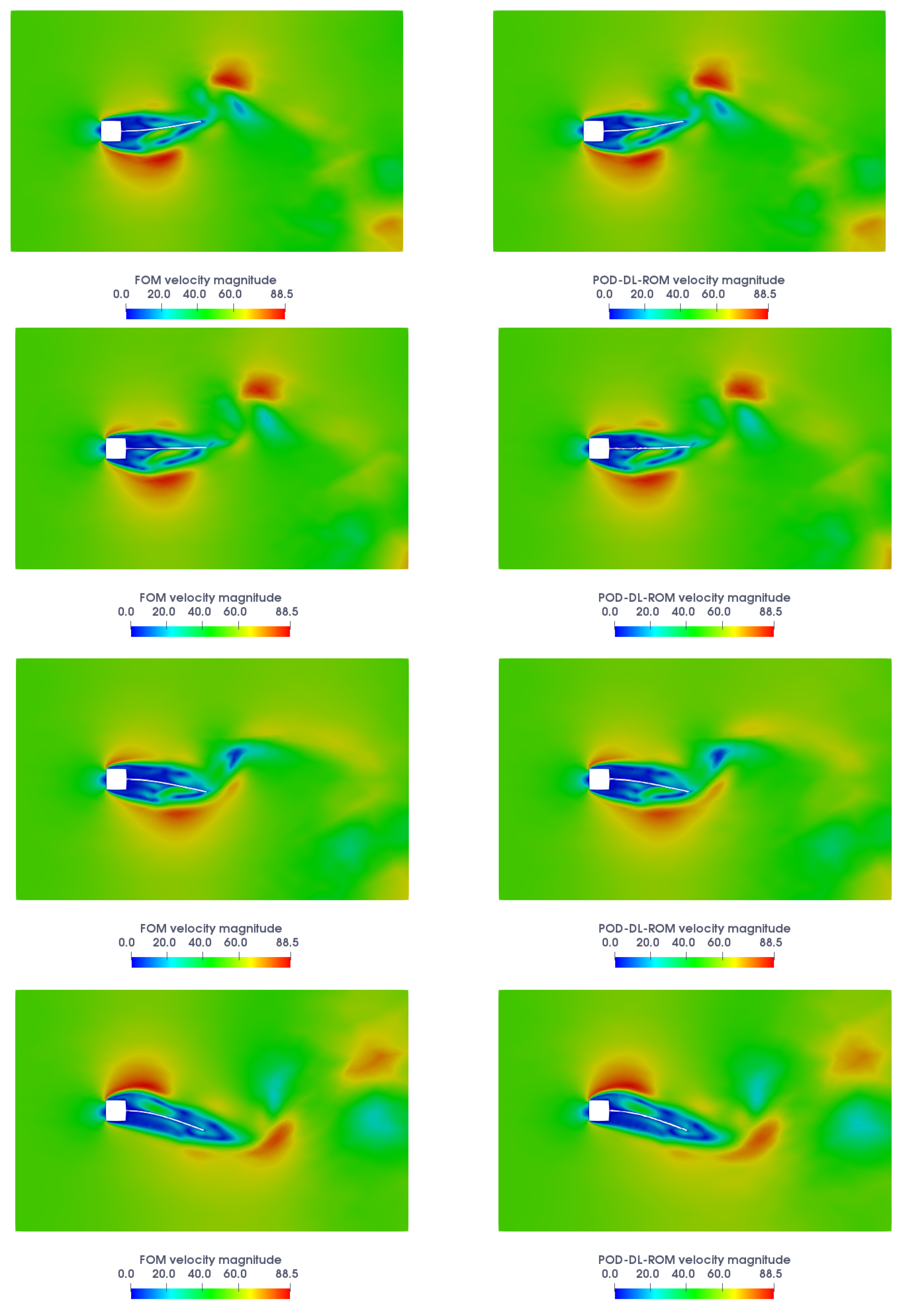
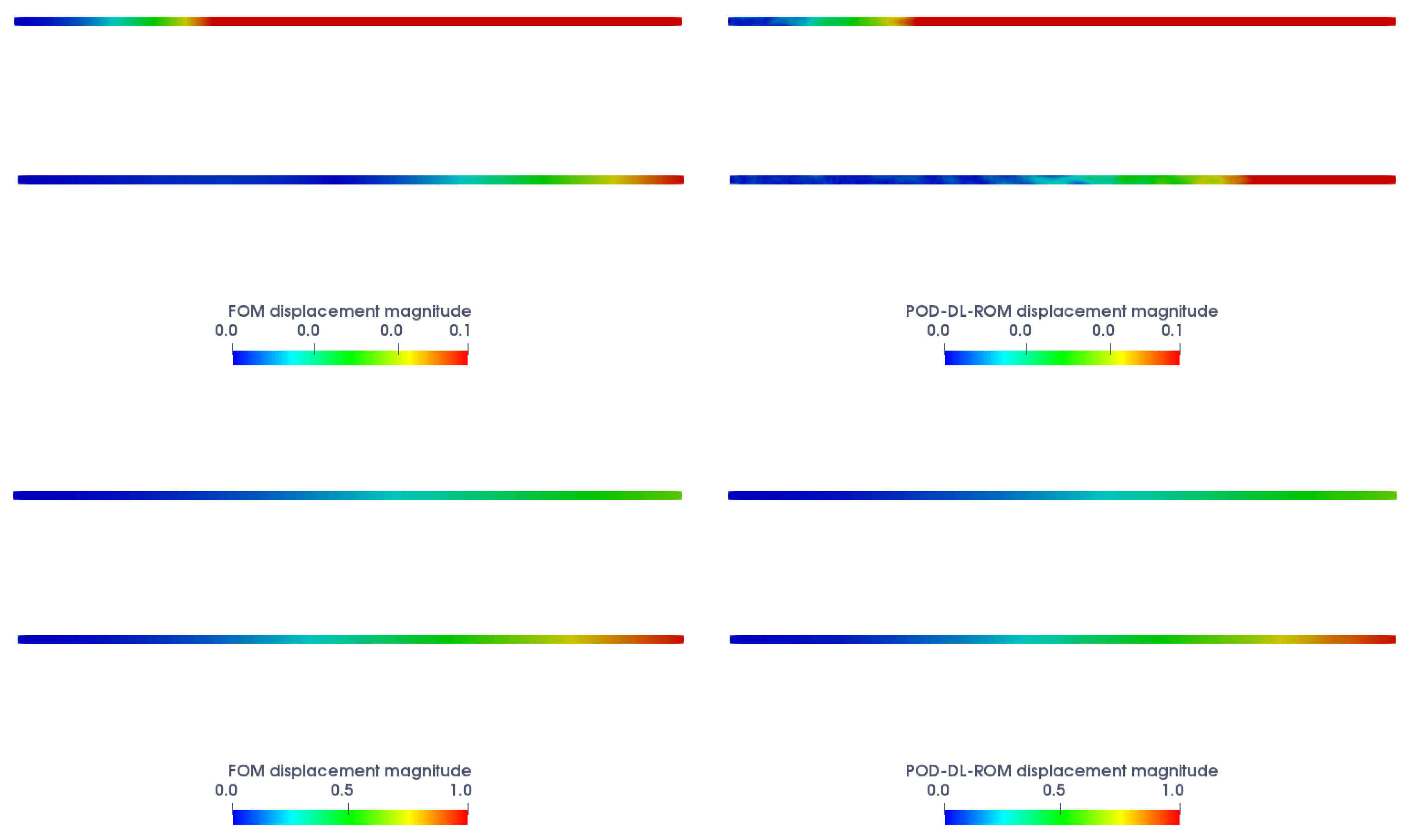
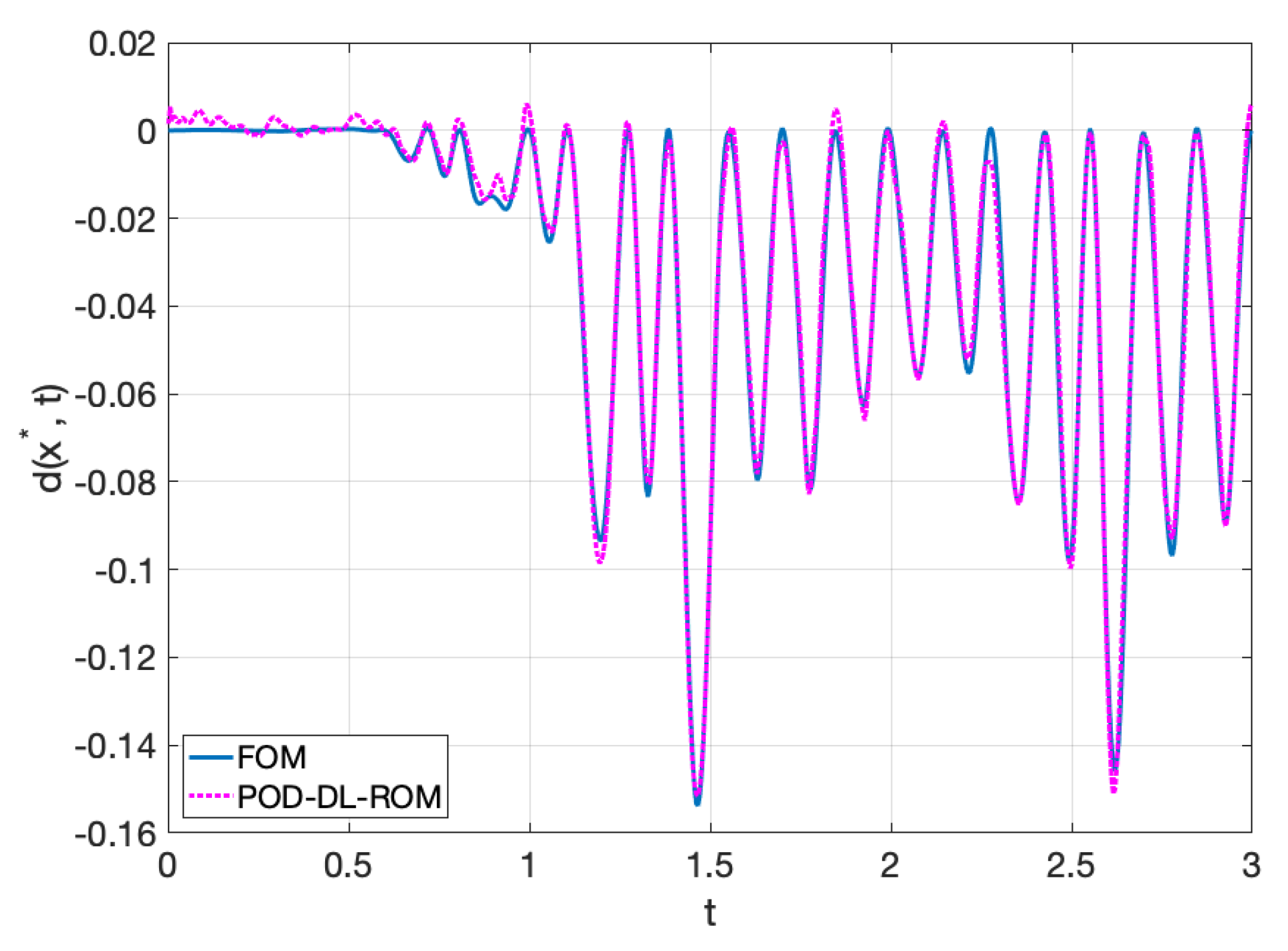
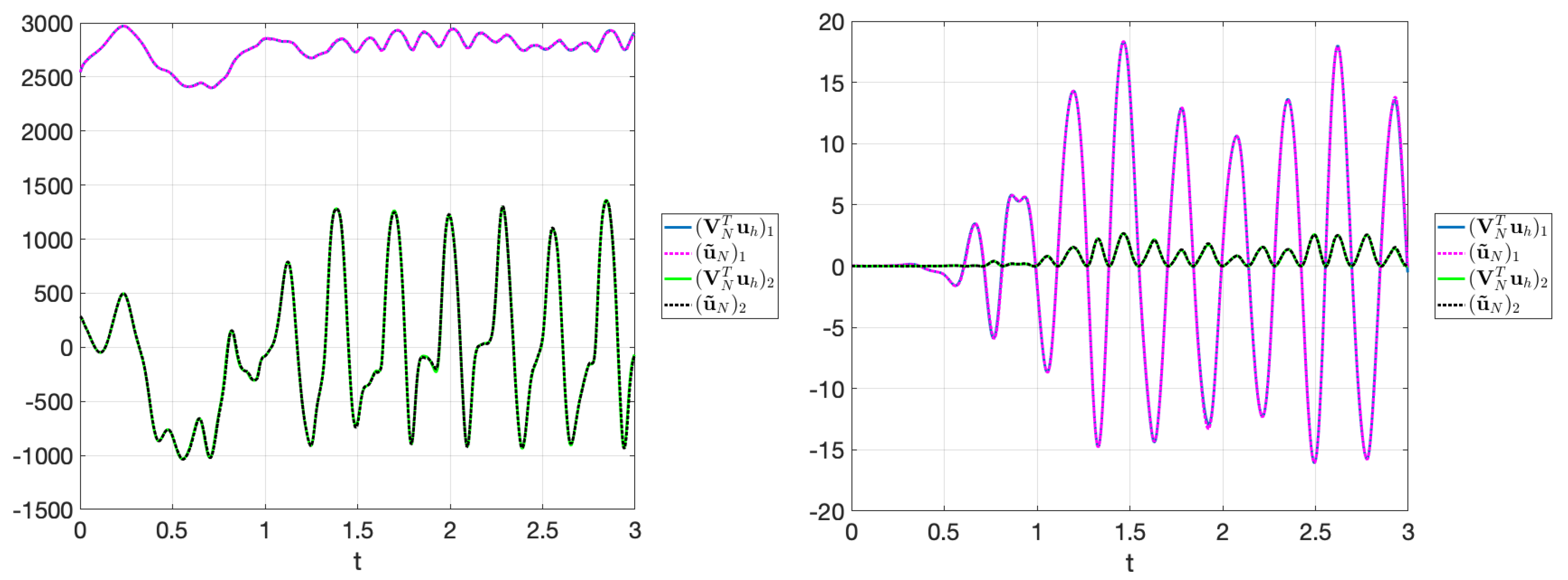
3.2. Test Case 2: Fluid–Structure Interaction
- Navier–Stokes in ALE form governing the fluid problem:
- nonlinear elastodynamics equation governing the solid dynamics:
- coupling at the FS interface :
- linear elasticity equations modeling the mesh motion problem:
- matching spatial discretizations between fluid and structure at the interface;
- for the fluid subproblem, SUPG stabilized linear finite elements () and a BDF of order 2 in time;
- for the structural subproblem, the same finite element space as for the fluid velocity and the Newmark scheme in time;
- for the fluid displacement, the same finite element space as for the fluid velocity.
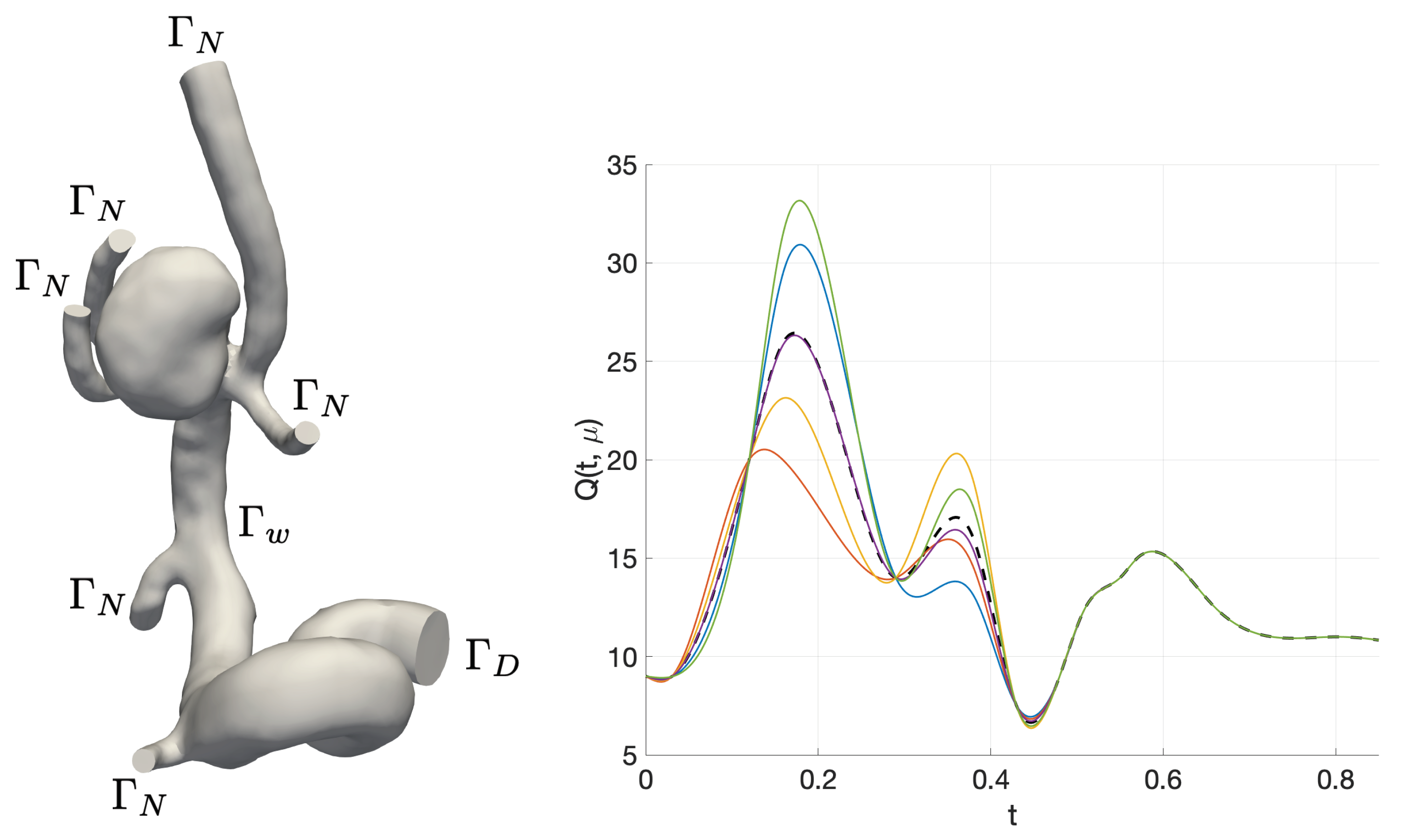
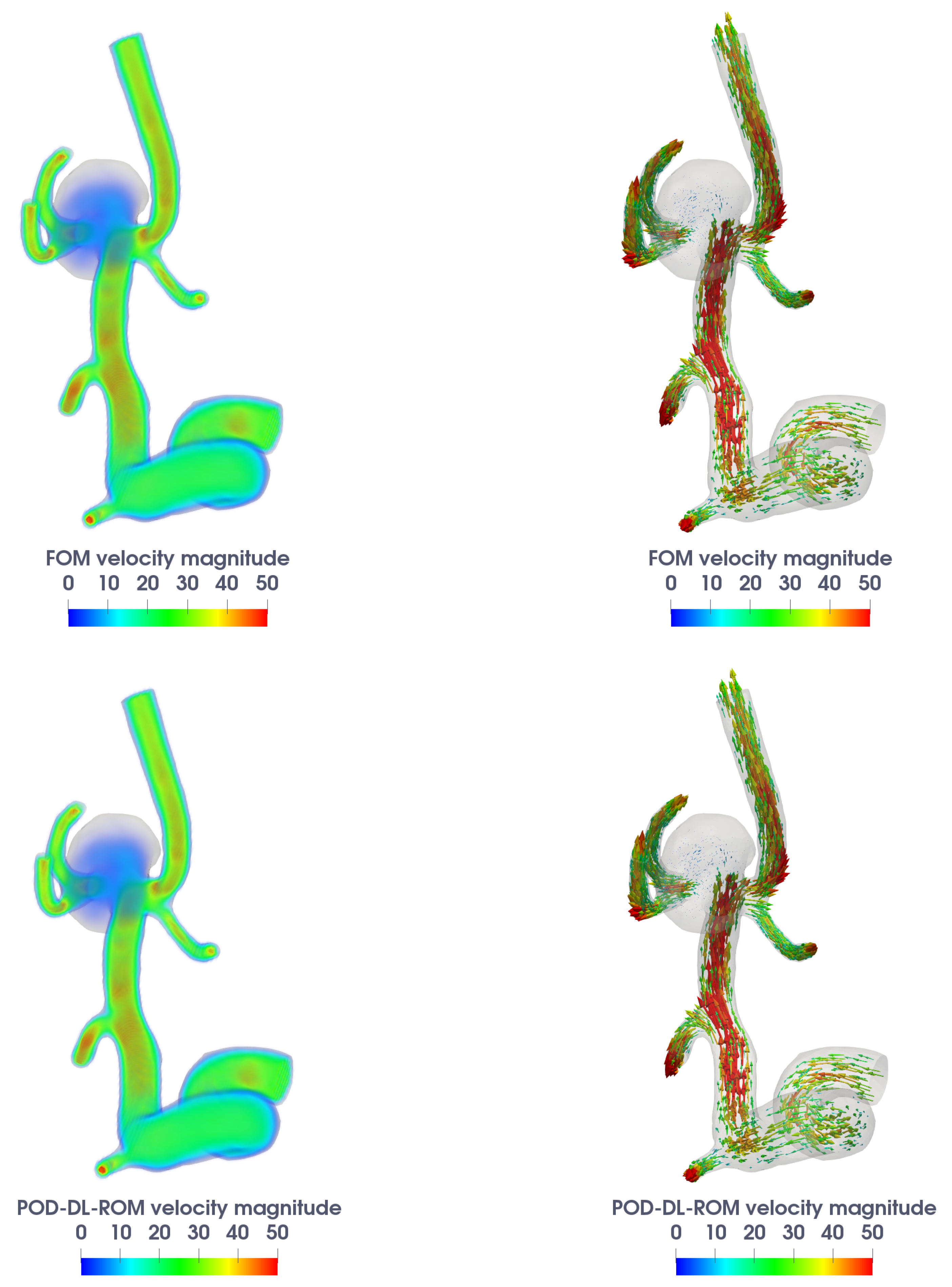
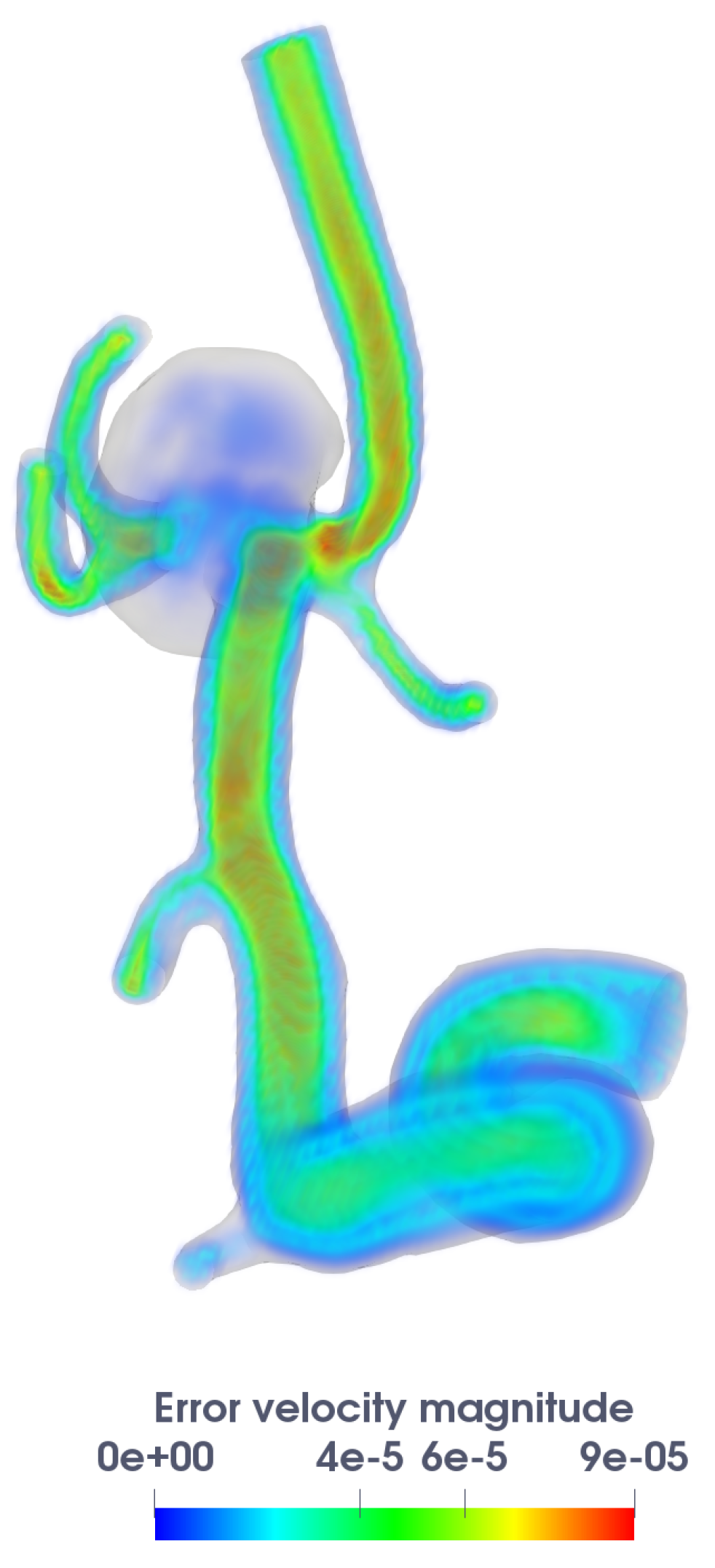
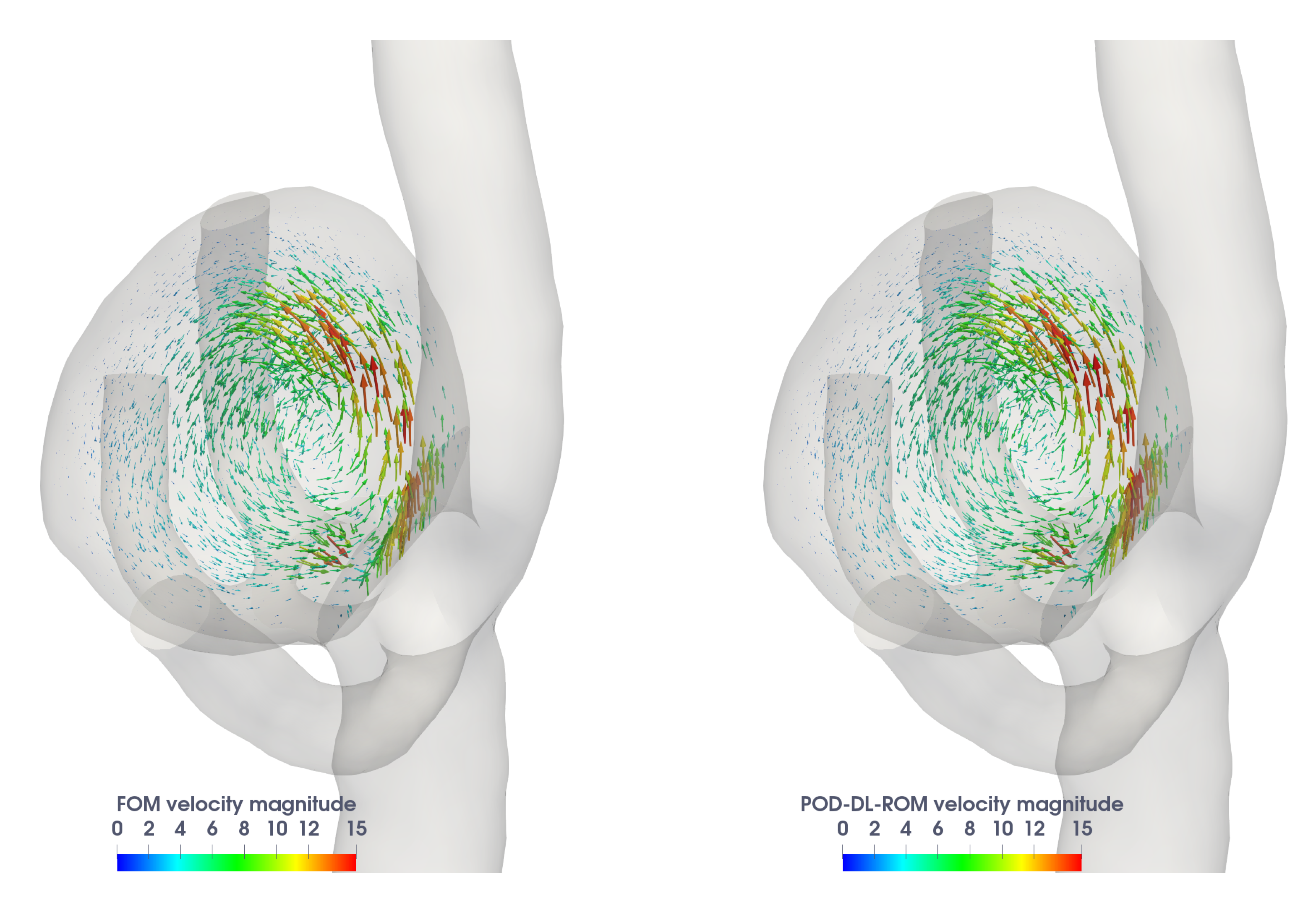
3.3. Test Case 3: Blood Flow in a Cerebral Aneurysm
4. Discussion
- treating efficiently nonlinearities and (nonaffine) parameter dependencies, thus avoiding expensive and intrusive hyper-reduction techniques;
- approximating both velocity and pressure fields, in those cases where one might be interested only in the visualization of a single field;
- imposing physical constraints that couple different submodels, as in the case of fluid–structure interaction (the different field variables are indeed treated as independent by the neural network);
- ensuring the ROM stability by enriching the reduced basis spaces;
- solving a dynamical system at the reduced level to model the fluid dynamics, though keeping the error propagation in time under control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Quarteroni, A.; Manzoni, A.; Vergara, C. The cardiovascular system: Mathematical modelling, numerical algorithms and clinical applications. Acta Numer. 2017, 26, 365–590. [Google Scholar] [CrossRef] [Green Version]
- Quarteroni, A.; Manzoni, A.; Negri, F. Reduced Basis Methods for Partial Differential Equations: An Introduction; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Kunisch, K.; Volkwein, S. Galerkin proper orthogonal decomposition methods for a general equation in fluid dynamics. SIAM J. Numer. Anal. 2002, 40, 492–515. [Google Scholar] [CrossRef]
- Gunzburger, M.D.; Peterson, J.S.; Shadid, J.N. Reducer-order modeling of time-dependent PDEs with multiple parameters in the boundary data. Comput. Methods Appl. Mech. Eng. 2007, 196, 1030–1047. [Google Scholar] [CrossRef]
- Bergmann, M.; Bruneau, C.H.; Iollo, A. Enablers for robust POD models. J. Comput. Phys. 2009, 228, 516–538. [Google Scholar] [CrossRef] [Green Version]
- Weller, J.; Lombardi, E.; Bergmann, M.; Iollo, A. Numerical methods for low-order modeling of fluid flows based on POD. Int. J. Numer. Methods Fluids 2010, 63, 249–268. [Google Scholar] [CrossRef] [Green Version]
- Ballarin, F.; Manzoni, A.; Quarteroni, A.; Rozza, G. Supremizer stabilization of POD–Galerkin approximation of parametrized steady incompressible Navier–Stokes equations. Int. J. Numer. Methods Eng. 2015, 102, 1136–1161. [Google Scholar] [CrossRef]
- Dal Santo, N.; Manzoni, A. Hyper-reduced order models for parametrized unsteady Navier-Stokes equations on domains with variable shape. Adv. Comput. Math. 2019, 45, 2463–2501. [Google Scholar] [CrossRef]
- Veroy, K.; Patera, A. Certified real-time solution of the parametrized steady incompressible Navier-Stokes equations: Rigorous reduced-basis a posteriori error bounds. Int. J. Numer. Method Fluids 2005, 47, 773–788. [Google Scholar] [CrossRef]
- Deparis, S. Reduced basis error bound computation of parameter-dependent Navier–Stokes equations by the natural norm approach. SIAM J. Numer. Anal. 2008, 46, 2039–2067. [Google Scholar] [CrossRef] [Green Version]
- Manzoni, A. An efficient computational framework for reduced basis approximation and a posteriori error estimation of parametrized Navier-Stokes flows. ESAIM Math. Model. Numer. Anal. 2014, 48, 1199–1226. [Google Scholar] [CrossRef] [Green Version]
- Yano, M. A Space-Time Petrov–Galerkin Certified Reduced Basis Method: Application to the Boussinesq Equations. SIAM J. Sci. Comput. 2014, 36, A232–A266. [Google Scholar] [CrossRef]
- Lassila, T.; Manzoni, A.; Quarteroni, A.; Rozza, G. Model order reduction in fluid dynamics: Challenges and perspectives. In Reduced Order Methods for Modeling and Computational Reduction; Quarteroni, A., Rozza, G., Eds.; Springer: Cham, Switzerland, 2014; Volume 9, pp. 235–274. [Google Scholar]
- Carlberg, K.; Farhat, C.; Cortial, J.; Amsallem, D. The GNAT method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. J. Comput. Phys. 2013, 242, 623–647. [Google Scholar] [CrossRef] [Green Version]
- Caiazzo, A.; Iliescu, T.; John, V.; Schyschlowa, S. A numerical investigation of velocity–pressure reduced order models for incompressible flows. J. Comput. Phys. 2014, 259, 598–616. [Google Scholar] [CrossRef]
- Carlberg, K.; Bou-Mosleh, C.; Farhat, C. Efficient non-linear model reduction via a least-squares Petrov–Galerkin projection and compressive tensor approximations. Int. J. Numer. Methods Eng. 2011, 86, 155–181. [Google Scholar] [CrossRef]
- Baiges, J.; Codina, R.; Idelsohn, S. Explicit reduced-order models for the stabilized finite element approximation of the incompressible Navier-Stokes equations. Int. J. Numer. Meth. Fluids 2013, 72, 1219–1243. [Google Scholar] [CrossRef]
- Rozza, G.; Huynh, D.; Manzoni, A. Reduced basis approximation and error bounds for Stokes flows in parametrized geometries: Roles of the inf–sup stability constants. Numer. Math. 2013, 125, 115–152. [Google Scholar] [CrossRef]
- Dal Santo, N.; Deparis, S.; Manzoni, A.; Quarteroni, A. An algebraic least squares reduced basis method for the solution of parametrized Stokes equations. Comput. Meth. Appl. Mech. Eng. 2019, 344, 186–208. [Google Scholar] [CrossRef]
- Lassila, T.; Manzoni, A.; Quarteroni, A.; Rozza, G. A reduced computational and geometrical framework for inverse problems in hemodynamics. Int. J. Numer. Methods Biomed. Eng. 2013, 29, 741–776. [Google Scholar] [CrossRef] [Green Version]
- Colciago, C.; Deparis, S.; Quarteroni, A. Comparisons between reduced order models and full 3D models for fluid–structure interaction problems in haemodynamics. J. Comput. Appl. Math. 2014, 265, 120–138. [Google Scholar] [CrossRef]
- Brunton, S.; Noack, B.; Koumoutsakos, P. Machine learning for fluid mechanics. Ann. Rev. Fluid Mech. 2020, 52, 477–508. [Google Scholar] [CrossRef] [Green Version]
- Kutz, J. Deep learning in fluid dynamics. J. Fluid Mech. 2017, 814, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Ströfer, C.; Wu, J.L.; Xiao, H.; Paterson, E. Data-driven, physics-based feature extraction from fluid flow fields using convolutional neural networks. Commun. Comput. Phys. 2019, 25, 625–650. [Google Scholar] [CrossRef] [Green Version]
- Lye, K.; Mishra, S.; Ray, D. Deep learning observables in computational fluid dynamics. J. Comput. Phys. 2020, 410, 109339. [Google Scholar] [CrossRef] [Green Version]
- Bhatnagar, S.; Afshar, Y.; Pan, S.; Duraisamy, K.; Kaushik, S. Prediction of aerodynamic flow fields using convolutional neural networks. Comput. Mech. 2019, 64, 525–545. [Google Scholar] [CrossRef] [Green Version]
- Thuerey, N.; Weißenow, K.; Prantl, L.; Hu, X. Deep learning methods for Reynolds-averaged Navier–Stokes simulations of airfoil flows. AIAA J. 2020, 58, 25–36. [Google Scholar] [CrossRef]
- Eichinger, M.; Heinlein, A.; Klawonn, A. Stationary flow predictions using convolutional neural networks. In Numerical Mathematics and Advanced Applications ENUMATH 2019; Vermolen, F., Vuik, C., Eds.; Lecture Notes in Computational Science and Engineering; Springer: Cham, Switzerland, 2021; Volume 139, pp. 541–549. [Google Scholar]
- Wang, J.X.; Huang, J.; Duan, L.; Xiao, H. Prediction of Reynolds stresses in high-Mach-number turbulent boundary layers using physics-informed machine learning. Theor. Comput. Fluid Dyn. 2019, 33, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Beck, A.; Flad, D.; Munz, C.D. Deep neural networks for data-driven LES closure models. J. Comput. Phys. 2019, 398, 108910. [Google Scholar] [CrossRef] [Green Version]
- San, O.; Maulik, R. Neural network closures for nonlinear model order reduction. Adv. Comput. Math. 2018, 44, 1717–1750. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Ripamonti, N.; Hesthaven, J. Recurrent neural network closure of parametric POD-Galerkin reduced-order models based on the Mori-Zwanzig formalism. J. Comput. Phys. 2020, 410, 109402. [Google Scholar] [CrossRef]
- Baiges, J.; Codina, R.; Castañar, I.; Castillo, E. A finite element reduced-order model based on adaptive mesh refinement and artificial neural networks. Int. J. Numer. Methods Eng. 2020, 121, 588–601. [Google Scholar] [CrossRef]
- Raissi, M.; Yazdani, A.; Karniadakis, G. Hidden fluid mechanics: Learning velocity and pressure fields from flow visualizations. Science 2020, 367, 1026–1030. [Google Scholar] [CrossRef] [PubMed]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Kissas, G.; Yang, Y.; Hwuang, E.; Witschey, W.; Detre, J.; Perdikaris, P. Machine learning in cardiovascular flows modeling: Predicting arterial blood pressure from non-invasive 4D flow MRI data using physics-informed neural networks. Comput. Methods Appl. Mech. Eng. 2020, 358, 112623. [Google Scholar] [CrossRef]
- Sun, L.; Wang, J.X. Physics-constrained bayesian neural network for fluid flow reconstruction with sparse and noisy data. Theor. Appl. Mech. Lett. 2020, 10, 161–169. [Google Scholar] [CrossRef]
- Hesthaven, J.; Ubbiali, S. Non-intrusive reduced order modeling of nonlinear problems using neural networks. J. Comput. Phys. 2018, 363, 55–78. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Hesthaven, J.; Ray, D. Non-intrusive reduced order modeling of unsteady flows using artificial neural networks with application to a combustion problem. J. Comput. Phys. 2019, 384, 289–307. [Google Scholar] [CrossRef] [Green Version]
- San, O.; Maulik, R.; Ahmed, M. An artificial neural network framework for reduced order modeling of transient flows. Commun. Nonlinear Sci. Numer. Simul. 2019, 77, 271–287. [Google Scholar] [CrossRef] [Green Version]
- Fukami, K.; Maulik, R.; Ramachandra, N.; Fukagata, K.; Taira, K. Probabilistic neural network-based reduced-order surrogate for fluid flows. arXiv 2020, arXiv:2012.08719. [Google Scholar]
- Fresca, S.; Manzoni, A. POD-DL-ROM: Enhancing deep learning-based reduced order models for nonlinear parametrized PDEs by proper orthogonal decomposition. arXiv 2021, arXiv:2101.11845. [Google Scholar]
- Xiao, D.; Fang, F.; Pain, C.; Hu, G. Non-intrusive reduced-order modelling of the Navier–Stokes equations based on RBF interpolation. Int. J. Numer. Methods Eng. 2015, 79, 580–595. [Google Scholar] [CrossRef]
- Xiao, D.; Fang, F.; Buchan, A.; Pain, C.; Navon, I.; Muggeridge, A. Non-intrusive reduced order modelling of the Navier–Stokes equations. Comput. Methods Appl. Mech. Eng. 2015, 293, 522–541. [Google Scholar] [CrossRef] [Green Version]
- Xiao, D.; Yang, P.; Fang, F.; Xiang, J.; Pain, C.; Navon, I. Non-intrusive reduced order modelling of fluid–structure interactions. Comput. Methods Appl. Mech. Eng. 2016, 303, 35–54. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Xiao, D.; Fang, F.; Govindan, R.; Pain, C.; Guo, Y. Model identification of reduced order fluid dynamics systems using deep learning. Int. J. Numer. Methods Fluids 2018, 86, 255–268. [Google Scholar] [CrossRef] [Green Version]
- Lui, H.; Wolf, W. Construction of reduced-order models for fluid flows using deep feedforward neural networks. J. Fluid Mech. 2019, 872, 963–994. [Google Scholar] [CrossRef] [Green Version]
- Brunton, S.; Proctor, J.; Kutz, J. Discovering governing equations from data by sparse identification of nonlinear dynamical systems. Proc. Nat. Acad. Sci. USA 2016, 113, 3932–3937. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rudy, S.H.; Kutz, J.N.; Brunton, S.L. Deep learning of dynamics and signal-noise decomposition with time-stepping constraints. J. Comput. Phys. 2019, 396, 483–506. [Google Scholar] [CrossRef] [Green Version]
- González, F.J.; Balajewicz, M. Deep convolutional recurrent autoencoders for learning low-dimensional feature dynamics of fluid systems. arXiv 2018, arXiv:1808.01346. [Google Scholar]
- Bukka, S.; Gupta, R.; Magee, A.; Jaiman, R. Assessment of unsteady flow predictions using hybrid deep learning based reduced-order models. Phys. Fluids 2021, 33, 013601. [Google Scholar] [CrossRef]
- Lee, K.; Carlberg, K.T. Model reduction of dynamical systems on nonlinear manifolds using deep convolutional autoencoders. J. Comput. Phys. 2020, 404, 108973. [Google Scholar] [CrossRef] [Green Version]
- Bazilevs, Y.; Takizawa, K.; Tezduyar, T. Computational Fluid-Structure Interaction: Methods and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Fresca, S.; Dedè, L.; Manzoni, A. A comprehensive deep learning-based approach to reduced order modeling of nonlinear time-dependent parametrized PDEs. J. Sci. Comput. 2021, 87, 1–36. [Google Scholar] [CrossRef]
- Fresca, S.; Manzoni, A.; Dedè, L.; Quarteroni, A. Deep learning-based reduced order models in cardiac electrophysiology. PLoS ONE 2020, 15, e0239416. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Clevert, D.; Unterthiner, T.; Hochreiter, S. Fast and accurate deep network learning by exponential linear units (ELUs). arXiv 2015, arXiv:1511.07289. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Delving deep into rectifiers: Surpassing human-level performance on imagenet classification. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1026–1034. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation, Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Negri, F. redbKIT Version 1.0. 2016. Available online: http://redbkit.github.io/redbKIT/ (accessed on 1 March 2021).
- Schäfer, M.; Turek, S. Benchmark computations of laminar flow around a cylinder. In Flow Simulation with High-Performance Computers II; Hirschel, E.H., Ed.; Vieweg+ Teubner Verlag: Braunschweig/Wiesbaden, Germany, 1996; pp. 547–566. [Google Scholar]
- Forti, D.; Dedè, L. Semi-implicit BDF time discretization of the Navier-Stokes equations with VMS-LES modeling in a high performance computing framework. Comput. Fluids 2015, 117, 168–182. [Google Scholar] [CrossRef]
- Singh, S.; Mittal, S. Vortex-induced oscillations at low Reynolds numbers: Hysteresis and vortex-shedding modes. J. Fluids Struct. 2005, 20, 1085–1104. [Google Scholar] [CrossRef]
- Wall, W. Fluid Structure Interaction with Stabilized Finite Elements. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 1999. [Google Scholar]
- Wall, W.; Ramm, E. Fluid Structure Interaction Based Upon a Stabilized (ALE) Finite Element Method. In Proceedings of the 4th World Congress on Computational Mechanics: New Trends and Applications, Buenos Aires, Argentina, 29 June–2 July 1998. [Google Scholar]
- Bazilevs, Y.; Calo, V.M.; Hughes, T.; Zhang, Y. Isogeometric fluid-structure interaction: Theory, algorithms, and computations. Comp. Mech. 2008, 43, 3–37. [Google Scholar] [CrossRef]
- Crosetto, P.; Deparis, S.; Fourestey, G.; Quarteroni, A. Parallel algorithms for fluid-structure interaction problems in haemodynamics. SIAM J. Sci. Comput. 2011, 33, 1598–1622. [Google Scholar] [CrossRef] [Green Version]
- Gee, M.; Küttler, U.; Wall, W. Truly monolithic algebraic multigrid for fluid–structure interaction. Int. J. Numer. Methods Eng. 2011, 85, 987–1016. [Google Scholar] [CrossRef]
- Bazilevs, Y.; Hsu, M.C.; Zhang, Y.; Wang, W.; Liang, X.; Kvamsdal, T.; Brekken, R.; Isaksen, J. A fully-coupled fluid-structure interaction simulation of cerebral aneurysms. Comput. Mech. 2010, 46, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Cebral, J.; Mut, F.; Sforza, D.; Löhner, R.; Scrivano, E.; Lylyk, P.; Putman, C. Clinical application of image-based CFD for cerebral aneurysms. Int. J. Numer. Methods Biomed. Eng. 2011, 27, 977–992. [Google Scholar] [CrossRef] [Green Version]
- Valencia, A.; Morales, H.; Rivera, R.; Bravo, E.; Galvez, M. Blood flow dynamics in patient-specific cerebral aneurysm models: The relationship between wall shear stress and aneurysm area index. Med. Eng. Phys. 2008, 30, 329–340. [Google Scholar] [CrossRef]
- AneuriskWeb. The Aneurisk Dataset Repository. Emory University & Orobix Srl, 2012–2013. Available online: http://ecm2.mathcs.emory.edu/aneuriskweb (accessed on 1 May 2021).
- Aneurisk Project. MOX, Mathematics Department, Politecnico di Milano. Available online: https://statistics.mox.polimi.it/aneurisk/ (accessed on 1 May 2021).
- Piccinelli, M.; Veneziani, A.; Steinman, D.; Remuzzi, A.; Antiga, L. A framework for geometric analysis of vascular structures: Application to cerebral aneurysms. IEEE Trans. Med. Imag. 2009, 28, 1141–1155. [Google Scholar] [CrossRef] [PubMed]
- Blanco, P.J.; Watanabe, S.M.; Passos, M.A.R.F.; Lemos, P.A.; Feijóo, R.A. An Anatomically Detailed Arterial Network Model for One-Dimensional Computational Hemodynamics. IEEE Trans. Biomed. Eng. 2015, 62, 736–753. [Google Scholar] [CrossRef] [PubMed]
- Negri, F. Efficient Reduction Techniques for the Simulation and Optimization of Parametrized Systems: Analysis and Applications. Ph.D. Thesis, EPFL Lausanne, Lausanne, Switzerland, 2015. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Input Dimension | Output Dimension | Kernel Size | #of Filters | Stride | Padding |
|---|---|---|---|---|---|---|
| 1 | [N, N, d] | [N, N, 8] | [5, 5] | 8 | 1 | SAME |
| 2 | [N, N, 8] | [N/2, N/2, 16] | [5, 5] | 16 | 2 | SAME |
| 3 | [N/2, N/2, 16] | [N/4, N4, 32] | [5, 5] | 32 | 2 | SAME |
| 4 | [N/4, N/4, 32] | [N/8, N/8, 64] | [5, 5] | 64 | 2 | SAME |
| 5 | N | 64 | ||||
| 6 | 64 | n |
| Layer | Input Dimension | Output Dimension | Kernel Size | #of Filters | Stride | Padding |
|---|---|---|---|---|---|---|
| 1 | n | 256 | ||||
| 2 | 256 | |||||
| 3 | [N/8, N/8, 64] | [N/4, N/4, 64] | [5, 5] | 64 | 2 | SAME |
| 4 | [N/4, N/4, 64] | [N/2, N/2, 32] | [5, 5] | 32 | 2 | SAME |
| 5 | [N/2, N/2, 32] | [N, N, 16] | [5, 5] | 16 | 2 | SAME |
| 6 | [N, N, 16] | [N, N, d] | [5, 5] | d | 1 | SAME |
| Total Time [h] | Testing Time [s] | 1-Sample Testing Time [s] | Speed-Up |
|---|---|---|---|
| 7 | () |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fresca, S.; Manzoni, A. Real-Time Simulation of Parameter-Dependent Fluid Flows through Deep Learning-Based Reduced Order Models. Fluids 2021, 6, 259. https://doi.org/10.3390/fluids6070259
Fresca S, Manzoni A. Real-Time Simulation of Parameter-Dependent Fluid Flows through Deep Learning-Based Reduced Order Models. Fluids. 2021; 6(7):259. https://doi.org/10.3390/fluids6070259
Chicago/Turabian StyleFresca, Stefania, and Andrea Manzoni. 2021. "Real-Time Simulation of Parameter-Dependent Fluid Flows through Deep Learning-Based Reduced Order Models" Fluids 6, no. 7: 259. https://doi.org/10.3390/fluids6070259
APA StyleFresca, S., & Manzoni, A. (2021). Real-Time Simulation of Parameter-Dependent Fluid Flows through Deep Learning-Based Reduced Order Models. Fluids, 6(7), 259. https://doi.org/10.3390/fluids6070259