1. Introduction
The proliferation of electric vehicles (EVs) does have enough potential to significantly reduce environmental and health-related issues caused by vehicular contaminant emissions. The rapid adoption of EVs on roads contributes to the United Nations’ sustainable development goals (SDGs) in terms of mobility to achieve an affordable, reliable, and sustainable mode of transportation [
1]. Electric transportation provides feasible solutions to the high reliance on fossil fuels and the volatility of their prices, in addition to environmental and health concerns associated with fossil-fuel based transportation [
2].
The required number of EVs on the road needed to accomplish net-zero emission targets defined by the International Energy Agency (IEA) remain enormous, as the current EV market share is significantly lower than what is required [
3,
4]. In this context, high vehicle cost, long charging time, range anxiety, and charging autonomy pose major challenges to promoting EVs. Although high EV battery capacity assures a high driving range, it increases weight as well as represents a high share of EV price [
5,
6]. Moreover, currently, EV batteries are emerging with high energy and power densities in addition to long-life time due to perceptible advancements in lithium-ion battery technology over the last decade. Therefore, high energy and power-dense batteries and modern energy conversion technologies enable EV manufacturers to produce high-capacity EVs with fast charging capabilities [
7,
8,
9,
10].
Currently, EV and/or EV supply equipment (EVSE) manufacturers produce DC off-board chargers that can potentially provide high power ratings ranging from 50 kW to 400 kW [
11]. Therefore, DC fast-charging stations (FCSs) can be deployed widely to overcome the challenges that are barriers to promoting EVs. Sparsely deployed FCSs may promote wholesale market adoption of lightweight EVs, as they can have similar refueling experience to gasoline counterparts [
12].
Although the sparse deployment of FCSs would alleviate charging and range concerns of long trips without requiring costly high-capacity EVs, high penetration of FCSs poses substantial impacts on the power grid in terms of network capacity, power system stability, and power quality. When FCS demand grows, rapid voltage changes and voltage flicker take place at the distribution grid. An FCS is a significant harmonic emission source to the grid that results in both voltage and current harmonic distortion. As EVSE are power electronic-based systems, an FCS causes super harmonic distortion in the power grid [
13]. Therefore, increasing penetration of FCSs into the distribution grid requires costly grid reinforcements or reconstructions to avoid issues related to power quality, network capacity, and energy market operation [
13,
14]. However, these costly grid reinforcements and reconstructions can be mitigated by embedding a renewable energy system (RES) or energy storage (ES) into the FCS while employing a coordinated charging scheme [
15,
16,
17]. Therefore, the contract demand, RES, or ES can be considered as the energy supply of the FCS that should ensures uninterruptible supply. To avoid grid stresses, the power supply of the FCS should strictly adhere to grid constraints while maximally utilizing the local energy supply.
Usually battery technology limits the maximum charging power. The material used for the battery electrodes affects the energy and power density of a lithium-ion battery. Moreover, the maximum charging power of a battery depends on the thermal performance of the cell, and the cooling arrangement in both the cell and pack level has a great impact on a battery’s maximum charging power [
18,
19,
20,
21]. The majority of commercial EV models are equipped with battery packs with a size ranging from 10 kWh to 100 kWh, along with specific charging constraints. Therefore, this wide range of charging demand has to be taken into consideration when developing charging coordination and scheduling schemes. To cope with the wide range of charging demand, the ICE61851 [
22] and ICE62196 [
23] standards contemplate a wide range of DC-fast chargers capable of providing fast and ultra-fast charging.
As far as commercially available EV models are concerned, it takes several minutes to a few hours for rechargem depending on the EV capacity, charging constraints of the EV batteries, the current state of charge (SoC), and EV user preferences. Therefore, it necessitates a charging scheduling scheme specially for time-consuming charging processes to optimize the charging process while adhering to a set of constraints enforced by the power grid and energy market. Different objectives related to the EV charging process at the FCS can be considered to formulate the optimization problem for EV charging. In this context, extensive research studies have been devoted to schedule EVs and coordinate the charging process at a CS over a planning horizon by considering various objectives such as economic aspects, operational aspects, service quality aspects, etc. Those research efforts focused on managing the EV fleet at FCSs can be basically split into two categories: (1) off-line or online/time-advance or real-time strategies; (2) static or mobility-aware strategies. Furthermore, most of the charging scheduling schemes presented in the literature employ a hierarchical architecture that allows tackling different objectives/aspects at different hierarchical layers [
24]. Most of the presented deterministic charging scheduling optimization problems assume that the input data for the problem are accurately known in advance [
24,
25,
26].
Although an offline strategy obtains the optimum charging schedule, due to various uncertainties associated with EV charging, illustrated in
Figure 1, the expected revenue might not be accomplished in real-time operation, and the obtained solution would not be a feasible or practical one. In order to cope with these uncertainties, authors have incorporated several techniques to optimally schedule EVs at the CS with this hierarchical approach. In some cases (e.g., [
27,
28]), intermediate or upper layers schedule charging processes with a static approach as an offline schedule, and the CS execute this schedule in real-time using a straight-forward heuristic algorithm with less computational overhead to cope with the dynamic environment.
In some other set of studies presented (e.g., [
29,
30]), the proposed static algorithm is executed iteratively to deal with the stochastic nature of the EV charging process. To minimize the revenue loss due to cancellations of scheduled charging processes and unexpected departures, authors in [
31] proposed multi-aggregator collaborative scheduling. As the EV demand can be shared among multiple aggregators in these strategies, the peak load caused by the high penetration of EVs can be smoothed at the power grid level.
This research focuses more on the benefits of the CS (aggregator) rather than the distinct charging demands of heterogeneous EV users. In these studies, attention was given to admitted EVs at the CS. Research into charging management of plugged-in EVs can be useful from the aggregator and grid stability perspectives, but to counterbalance customer/ EV user satisfaction, it is important to consider the quality of service related to EV charging in terms of EV blockage, preemptage, reliability, availability, etc. More importantly, optimal utilization of the FCS capacity with limited energy resources is an open research hotshot. Nevertheless, the proposed strategies would have been more realistic, feasible, and practical if a limited number of chargers/EVSE had been considered in the aforementioned research.
These research studies [
32,
33] proposed their charging scheduling strategies by considering limited charging resources. However, they have employed only the charging station capacity in their analysis but not the limited number of chargers/ EVSE. In a more realistic charging coordination scheme, the number of chargers/ EVSE and their individual capacity put another constraint on the charging coordination. However, limited charging resources including both energy resources and chargers/EVSE might not be optimally utilized by the registered/scheduled EV users due to various uncertainties, shown in
Figure 1, in dynamic conditions. Moreover, scheduling the charging processes with only a few minutes of duration (long-trip drivers or ultra-fast charging users) might not be realistic. Although substantial research efforts have been devoted to optimal scheduling of EVs at a CS, how to effectively exploit unused limited charging resources allocated for scheduled users (SEVs) to further enhance resource utilization is not adequately analyzed to the best of the authors’ knowledge.
Therefore, we propose event-based dynamic charging resource allocation and charging coordination strategies so that opportunistic ultra-fast charging users (UEVs) are allowed with different access privileges to exploit unused limited charging resources when registered SEVs are not very active within the FCS. In this work, we employ Monte Carlo simulation approach to assess the performance of the FCS in terms of charging resource utilization, charging completion, and quality of service aspects.
The novel technical contributions from this work can be summarized as follows:
Dynamic charging resource coordination strategies are proposed so that UEVs can exploit unused limited charging resources to enhance the charging resource utilization at the FCS while assuring high-quality service for both types of users.
Resource allocation and charging coordination is performed in a manner that the system changes its state when an event occurs and it remains until the next event occurs. This alleviates more practical issues of frequent on–off or modulating charging coordination strategies.
Performance evaluation parameters are defined and analyzed in a generic nature to evaluate the quality of service (QoS) of charging processes of SEVs and UEVs.
The subsequent sections of this paper are organized as follows.
Section 2 describes the proposed dynamic charging resource coordination strategies. In
Section 3, Monte Carlo simulation-based performance assessment framework associated with proposed charging coordination strategies is elaborated in
Section 3.2, followed by
Section 3.3 that explains the FCS centric performance assessment framework.
Section 4 discusses obtained results from the developed MCS for selected scenarios. Finally,
Section 5 concludes the innovative findings while highlighting further work related to this effort.
2. Dynamic Charging Coordination Strategies
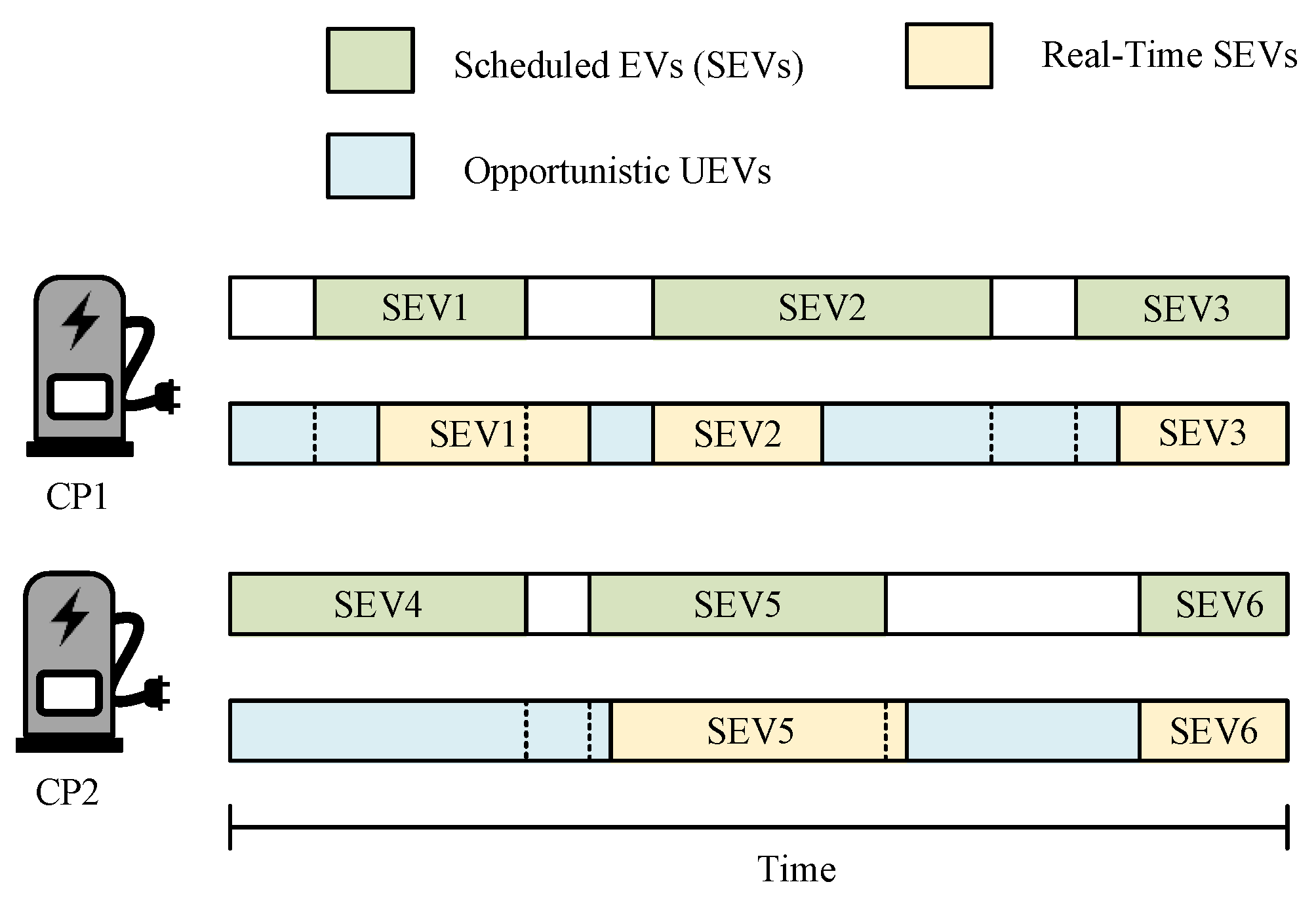
An FCS is built with a limited number of off-board chargers/EVSE and energy supply units with limited capacity. Therefore, a commercial FCS intends to maximize the profit by scheduling EVs optimally with the effective use of available limited resources. However, due to various uncertainties associated with the scheduled charging process, charging resources may not be optimally utilized even though the EV schedule obtains the maximized profit with SEVs. In order to get the advantage of very short charging time associated with ultra-fast charging technology, this work intends to evaluate the overall performance of an FCS that serves both SEVs and opportunistic ultra-fast charging EV users (UEVs), as illustrated in
Figure 2.
When we consider the operation of FCS, there are basically two types of EV users, as tabulated in
Table 1: (1) SEVs and (2) UEVs with distinct privileges and constraints in accessing the FCS.
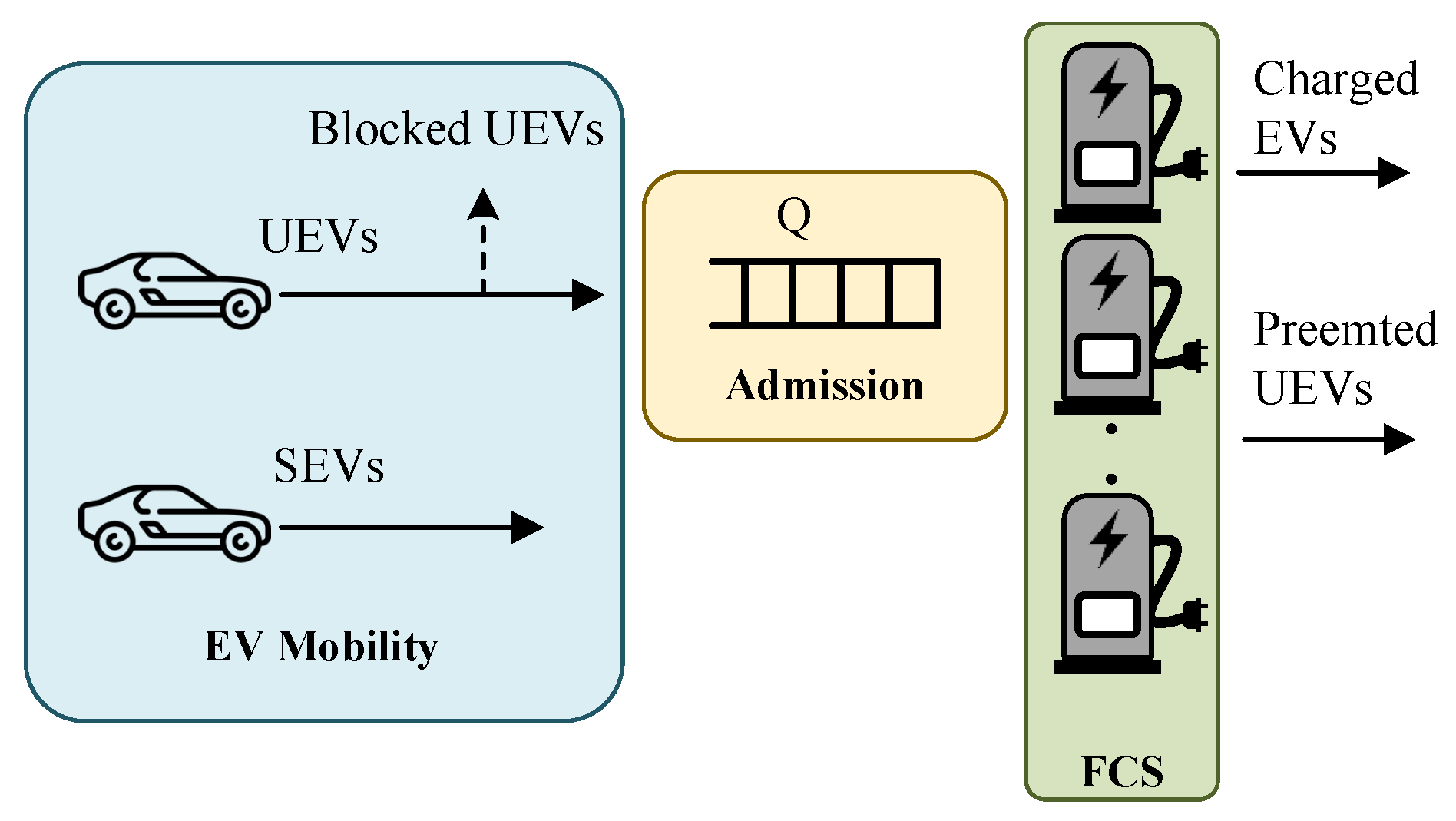
The prime objective of FCS is to provide uninterruptible EV charging to SEVs who have prior agreements with the FCS. The operating model of the considered FCS is illustrated in
Figure 3.
In this work, we have considered an already deployed FCS with M; number of off-board chargers (OBCs), and it is assumed that the charging power of each charger can be adjustable. A queue space (Q) with q number of queue points (QPs) is allocated so that newly arrived UEVs are queued if charging resources are not available. In the meantime, FCS admits opportunistic UEVs to compensate for under-utilization of limited charging resources. SEVs are charged at a specified charge rate of . Consequently, the capacity of FCS is limited to throughout the operating horizon. Therefore, depending on the availability of charging resources, UEVs can be charged at high charge rate. Based on the day-to-day life activities of EV users and the charging constraints of EV batteries, some EV users may need undisturbed and prioritized EV charging (i.e., SEVs). At the same time, some other EV users just want to enhance their cruise range by refilling their high-capacity EV batteries up to the maximum possible level quickly during their journey. Consequently, they can be considered as UEVs. Therefore, FCSs should have a charging pricing mechanism for SEVs and OEVs based on charging priorities. Moreover, EVs capable of ultra-fast charging with high charging power rates can request to be an UEV so that they can charge their EVs with an economical pricing scheme. In this work, we assume that the charging rate of UEVs is and the value n is selected such that is less than the maximum capacity of an OBC . Therefore, it is considered that .
Although the OBC capacity is , we consider that the initial capacity of the FCS is . In this work, we intend to analyze the possibility of enhancing capacity utilization with the help of heterogeneous EV users. However, with regard to M OBCs, the maximum capacity of FCS is . Depending on the progressing charging demand, the capacity of the FCS can be scaled up to from .
3. Methods
This work intends to develop a Monte Carlo simulation-based performance assessment framework to analyze proposed charging resource coordination strategies.
When we consider the whole charging management at the FCS, there are two stages: (1) scheduling SEVs in a optimal way to maximize the profit; (2) admitting UEVs as secondary users to further enhance the utilization of limited charging resources. In this work, we focus on the impact of opportunistic users over SEVs and themselves. Monte Carlo simulation is used to analyze system dynamics and uncertainties associated with the EV charging process.
3.1. Stochastic EV Mobility Model
Monte Carlo simulation is developed to analyze proposed charging coordination strategies. Therefore, the following assumptions are made to develop this MCS model.
The arrivals of SEVs and UEVs are Poisson processes with mean arrival rates of and , respectively ( denotes the average number of charging requests made by the respective category of EVs per unit time).
All OBCs are homogeneous and the charging time of a OBC is exponentially distributed with the service rate of ( rate denotes the average number of charged EVs per OBC per unit time).
Admission delays associated with EVs at the FCS are negligible as compared to charging times.
The EV mobility model is developed as a continuous-time discrete-space stochastic model. The arrival rate and service rate are considered as time-dependent data to cater system dynamics. Let
T be the planning horizon and thus, we consider
intervals over
T. Consequently, the planning horizon can be denoted as
. It is considered that the number of arrivals within time interval
t follows a Poisson distribution under the following conditions. If the average arrival rate of EVs is
over the
, the probability of one arrival of EV during
is
;
: order of
. The probability of more than one arrival of EVs during
is
. The occurrence of EV arrivals in non-overlapping intervals are mutually independent. Then, the number of EV arrivals
occurring during
can be modeled as a Poisson process with parameter
as expressed in (
1) [
34,
35,
36].
3.2. Dynamic Charging Coordination Model
To develop the MCS model with proposed event-based dynamic charging coordination strategies, the following events are considered: SEV or UEV arrivals at FCS and SEV or UEV departures from FCS. Each plugged-in EV and each queued EV are sequentially indexed and placed in dynamic arrays
and
, respectively, to analyze system dynamics. Let
,
,
,
,
, and
be the arrival time, plugged-in time, required charging time, remaining charging time, EV user type, and index of the
kth
plugged-in EV, an element of
associated with the
kth SEV or UEV arrival at time
can be expressed as (
2). Similarly, an
element is derived for an SEV or UEV departure at time
. If
follows the exponential distribution, it is expressed in (
3).
The MCS model keeps its current state in terms of allocated resources, the number of plugged-in EVs, and their charging power unchanged until the next event occurs.
Information pertaining to all possible events is kept in matrix
. Therefore,
that accounts for all possible
x events taken place at
,
, …,
within 0 to
T can be expressed as (
4). Similarly, all the information of queued EVs at each event is kept in
expressed in (
5).
The FCS is obliged to admit SEVs if they arrive within the scheduled time period. For charging resource allocation, M number of OBCs and a queue with Q number of queuing points (QPs) are considered. The queue is reserved only for UEVs at the arrival if charging resources are not adequate to admit them. To update system matrix and , the following events are considered.
Arrival of SEVs at FCS: Charging resource allocation for SEVs is illustrated in Algorithm 1. When an SEV arrives at the FCS at time , if there is at least one idle CP, it is plugged into the FCS without disturbing any ongoing UEV charging process. Otherwise, one charging process of UEV has to be preempted to admit the newly arrived SEV, as they are liable to do so.
| Algorithm 1: Pseudo code (PC) for updating at SEV arrivals. |
| Input : : Number of plugged-in SEVs at time |
| Input : : Number of plugged-in UEVs at time |
| Input : : Total number of arrived SEVs at time |
| Input : : Total number of plugged-in EVs by time |
| Output: : Plugged-in EVs matrix at time |
| Output: : Queued EVs matrix at time |
![Batteries 09 00140 i001]() |
Departure of SEVs from FCS: Algorithm 2 explains how charging resources are coordinated upon a departure of SEV at time . Once an SEVs’ charging process regularly finishes, it departs the FCS, resulting in an idle OBC. For this OBC, the chance is given to queued UEVs if any. Otherwise, the OBC will be idle.
| Algorithm 2: PC for updating and at SEV departures. |
| Input : : Number of plugged-in SEVs at time |
| Input : : Number of plugged-in UEVs at time |
| Input : : Total number of queued UEVs at time |
| Input : : Total number of plugged-in EVs at time |
| Input: : Queued EVs matrix at time |
| Output: : Plugged-in EVs matrix at time |
![Batteries 09 00140 i002]() |
Arrival of UEVs at FCS: The FCS accepts UEVs if SEVs do not occupy all the OBCs. The charging process of plugged-in UEVs are not preempted upon the arrival of a new UEV. When a new UEV arrives at the FCS, it is plugged in if at least an OBC and enough energy resources are available to provide a charge rate of . Otherwise, the UEV is blocked. Charging resource allocation for newly arrived UEVs is illustrated in Algorithm 3.
| Algorithm 3: PC for updating and at UEV arrivals. |
| Input : : Number of plugged-in SEVs at time |
| Input : : Number of plugged-in UEVs at time |
| Input : : Total number of arrived SEVs at time |
| Input : : Total number of plugged-in EVs by time |
| Output: : Plugged-in EVs matrix at time |
| Output: : Queued EVs matrix at time |
![Batteries 09 00140 i003]() |
Departure of UEVs from FCS: Unlike for SEVs, an UEV departure leaves one OBC and energy resources associated with n OBCs. The idle OBC(s) that appeared in the FCS due to the departure of a UEV will be offered to EVs waiting in the queue. If the queue is empty, then the vacant BCS(s) become idle. The charging resource coordination upon a UEV departure is performed according to Algorithm 4.
| Algorithm 4: PC for updating and at UEV departures. |
| Input : : Number of plugged-in SEVs at time |
| Input : : Number of plugged-in UEVs at time |
| Input : : Total number of queued UEVs at time |
| Input : : Total number of plugged-in EVs at time |
| Input: : Queued EVs matrix at time |
| Output: : Plugged-in EVs matrix at time |
![Batteries 09 00140 i004]() |
3.3. FCS Centric Performance Evaluation Parameters
At an FCS, the optimum resource allocation for EVs is very indispensable for sustainable operation. When there are two EV categories, it is necessary to analyze the blockages and waiting of inferior users.
However, high charging resource utilization may affect the charging completion rates of both plugged-in SEVs and UEVs. Upon the arrival of SEVs, some charging processes of UEVs might be preempted. Analyzing all these aspects is very essential for the FCS to provide high-quality service to EV users. In this work, we develop an MCS model with proposed resource allocation and charging coordination strategies as an event-driven model and simulate for a large time horizon until the model comes to its equilibrium. From the system matrices , we have analyzed the performance of developed strategies in terms of charging resource utilization and charging service quality.
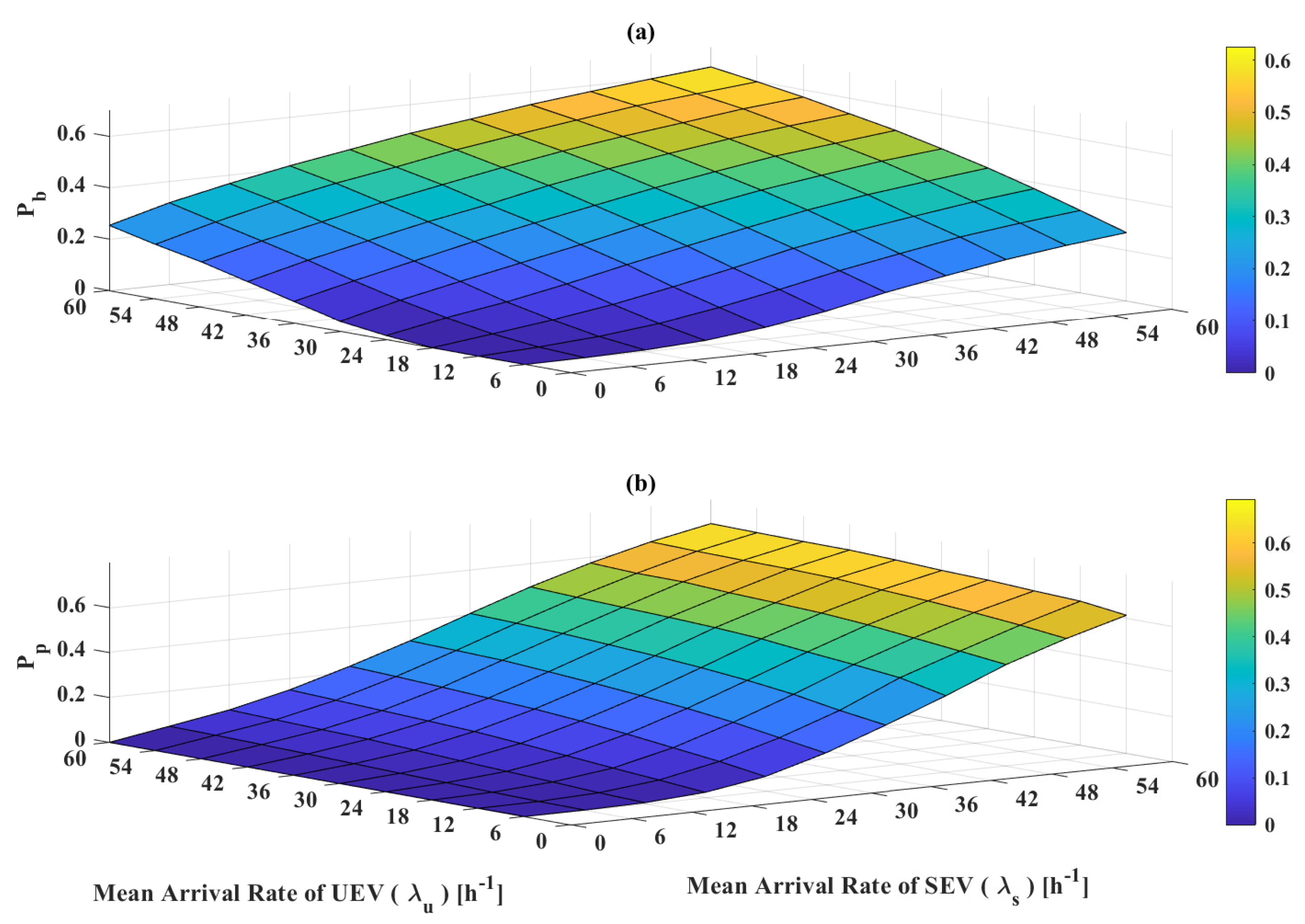
3.3.1. Blocking Probability of UEVs
Although the FCS accepts UEVs to enhance the utilization of limited charging resources, there may be occasions where a charging request from a UEV has to be dropped due to limited or unavailable charging resources. Therefore, upon arrival of a UEV at the FCS, there is a probability that the charging request is denied. This EV blockage is a crucial factor to be analyzed from a service quality perspective. A charging request from an UEV is denied when the following conditions are met at the same time: (1) all OBCs are occupied; (2) energy resources are not adequate to admit the new UEV; (3) the allocated space for the queue is full. The blocking probability of UEVs can be obtained with (
6).
3.3.2. Preempting Probability of UEVs
According to the defined admission control and charging coordination strategies, the charging process of UEVs are liable to be preempted if charging resources are not adequate to admit SEVs. This action is defined as the preempting of UEVs. Therefore, the probability at which an ongoing charging process of a UEV is forcibly terminated before being regularly finished is termed as the preempting probability of UEVs. If there are limitations for certain user types to utilize limited charging resources, the charging quality of such users is a crucial factor to be analyzed for long-term benefits. By considering derived system matrix
,
can be derived as expressed in (
7).
3.3.3. Mean Charging Time at the FCS
Amidst busy schedules, users prefer to get their EVs recharged as fast as possible, hence, the total time spent at the FCS is going to be a crucial measure for evaluating the service quality provided by the FCS. Total time of charging is not only essential for operation management but also for finding the optimum location and the size of the FCS within a certain area/region. Specifically, analyzing the mean time spent by an opportunistic UEV at the FCS is indispensable for assuring quality service for secondary users. The total time spent by SEVs at FCS is nothing but the required charging time to attain the requested SoC. However, as some of UEVs have to wait at the queue and terminate their charging process forcibly before being regularly finished, this
provides very essential QoS measurement for opportunistic users. Mean charging time of SEVs can be obtained from
as expressed in (
8).
In order to analyze the total time spent by UEVs at the FCS, we consider both mean charging time
and mean waiting time
at the queue. Therefore, the total waiting time of UEVs over total queued UEVs gives the mean waiting time of UEVs
as expressed in (
10).
The total mean time spent by an EV user type (SEV or UEV) can be found by calculating the summation of and .
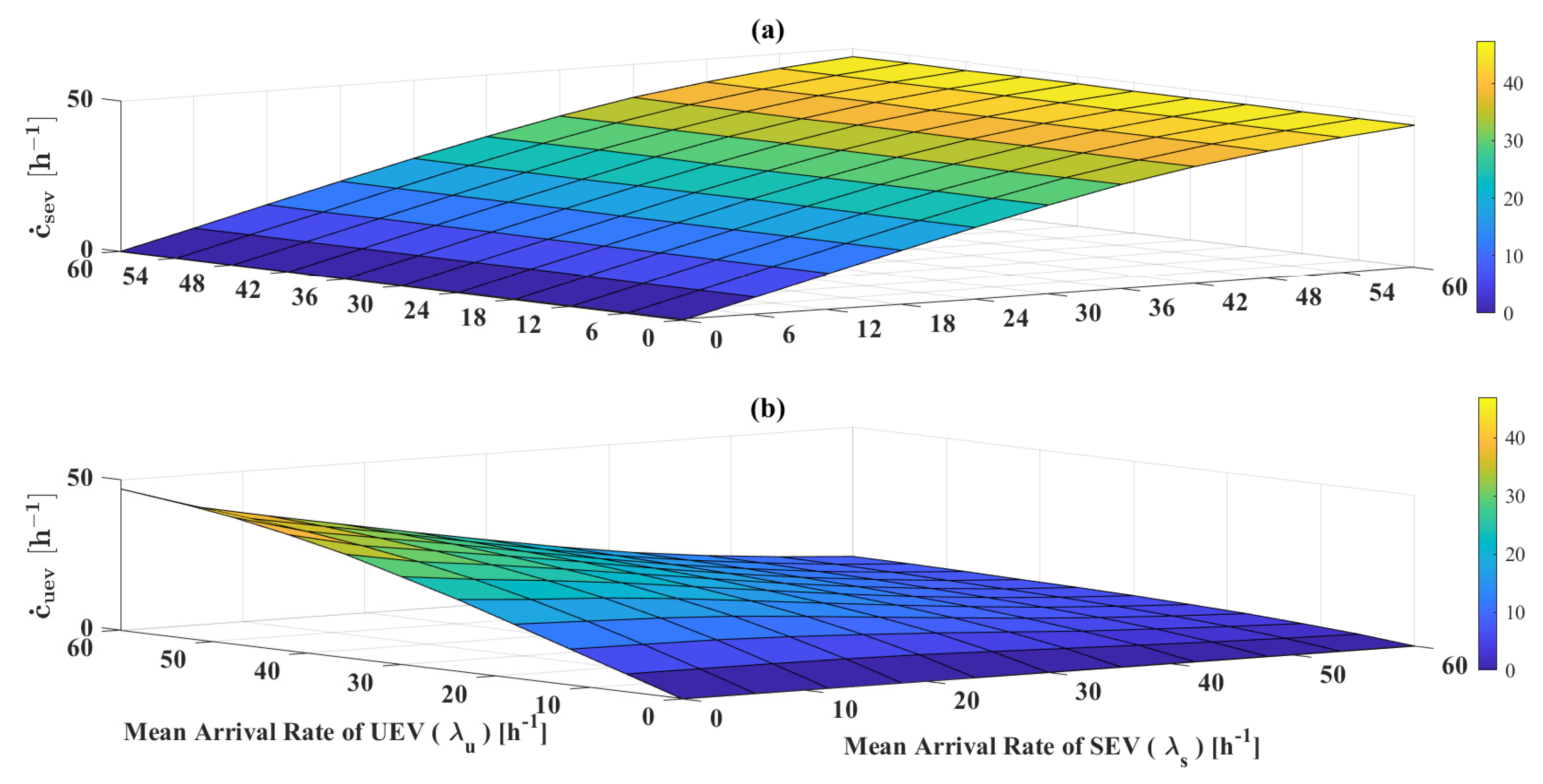
3.3.4. Mean Charging Completion Rate
Mean charging completion rate
of a particular EV user type implies the corresponding number of charging processes that finish regularly attaining the requested SoC within unit time. As we have employed secondary users over scheduled or registered users in the proposed strategies, it is very essential to evaluate the impact on one another in the charging process. Therefore,
and
are expressed in (
11) and (
12), respectively.
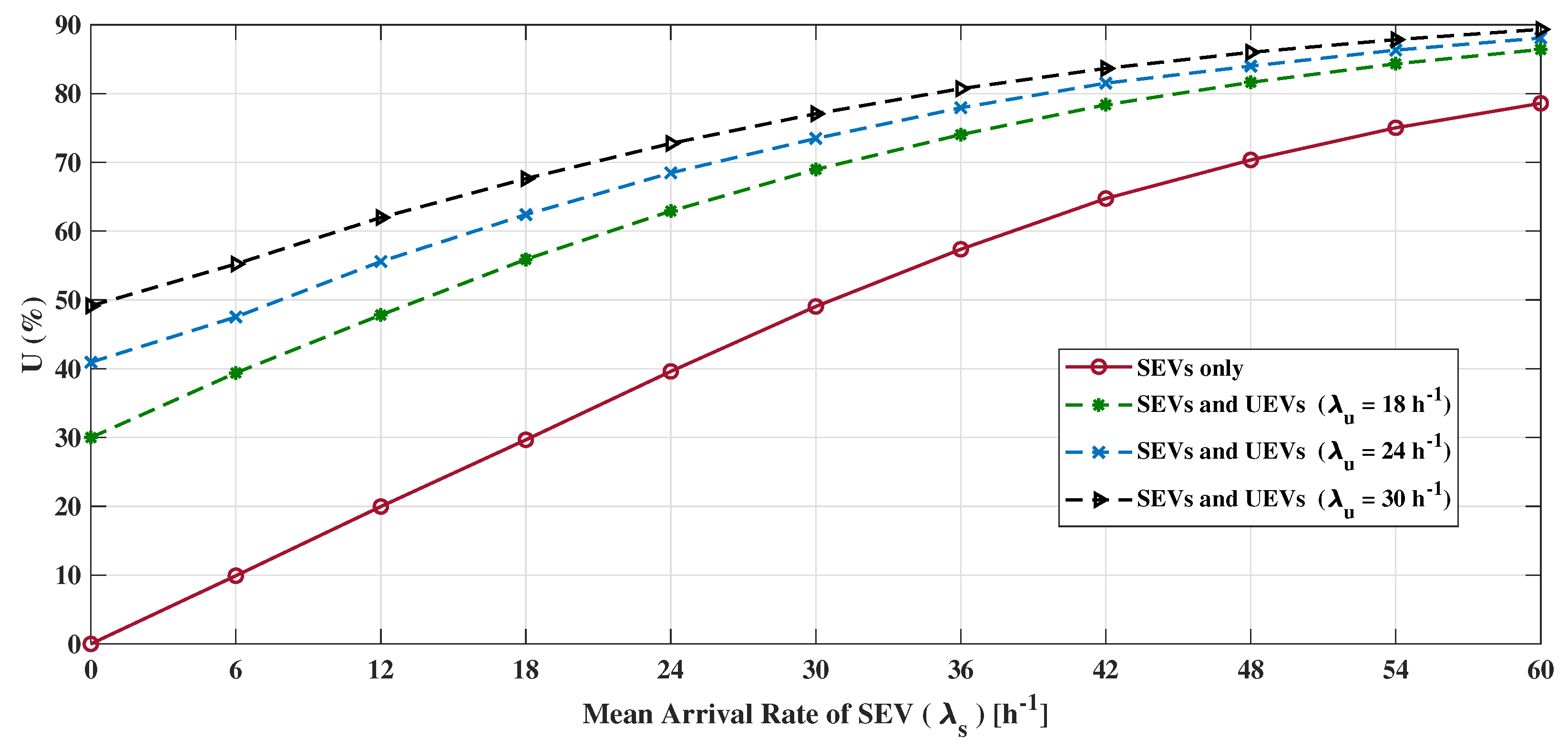
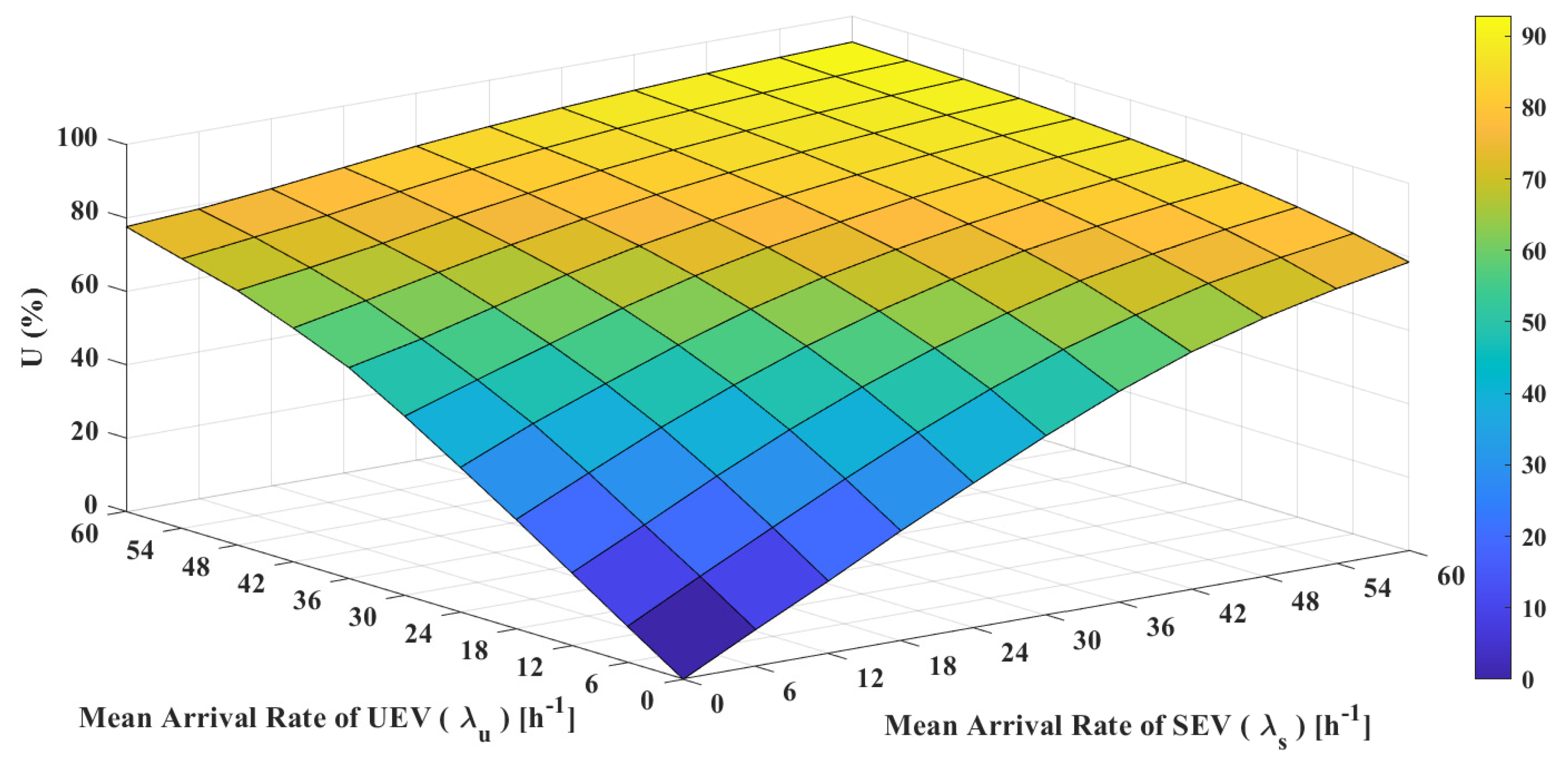
3.3.5. Charging Resource Utilization of the FCS (U)
The main objective of this work is to further maximize the utilization of limited charging resources with opportunistic UEVs providing a compensation to under-utilization of limited charging resources due to various uncertainties associated with EV charging process. Therefore, charging resource utilization is an important parameter to present the overall performance of the FCSs’ operation. In this work, as we have considered the total capacity of the FCS along with the number of OBCs instead of employing a separate demand limit. The charging resource utilization (
U) is defined as the steady state value of utilized OBCs over the total number of OBCs. Therefore,
U can be expressed as in (
13).
The presented MCS based analytical model assesses the performance of proposed dynamic charging resource coordination strategies for selected categories of EV users depending on their charging priorities.




 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}