
Design and Experimental Results of an Adaptive Fractional-Order Controller for a Quadrotor




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
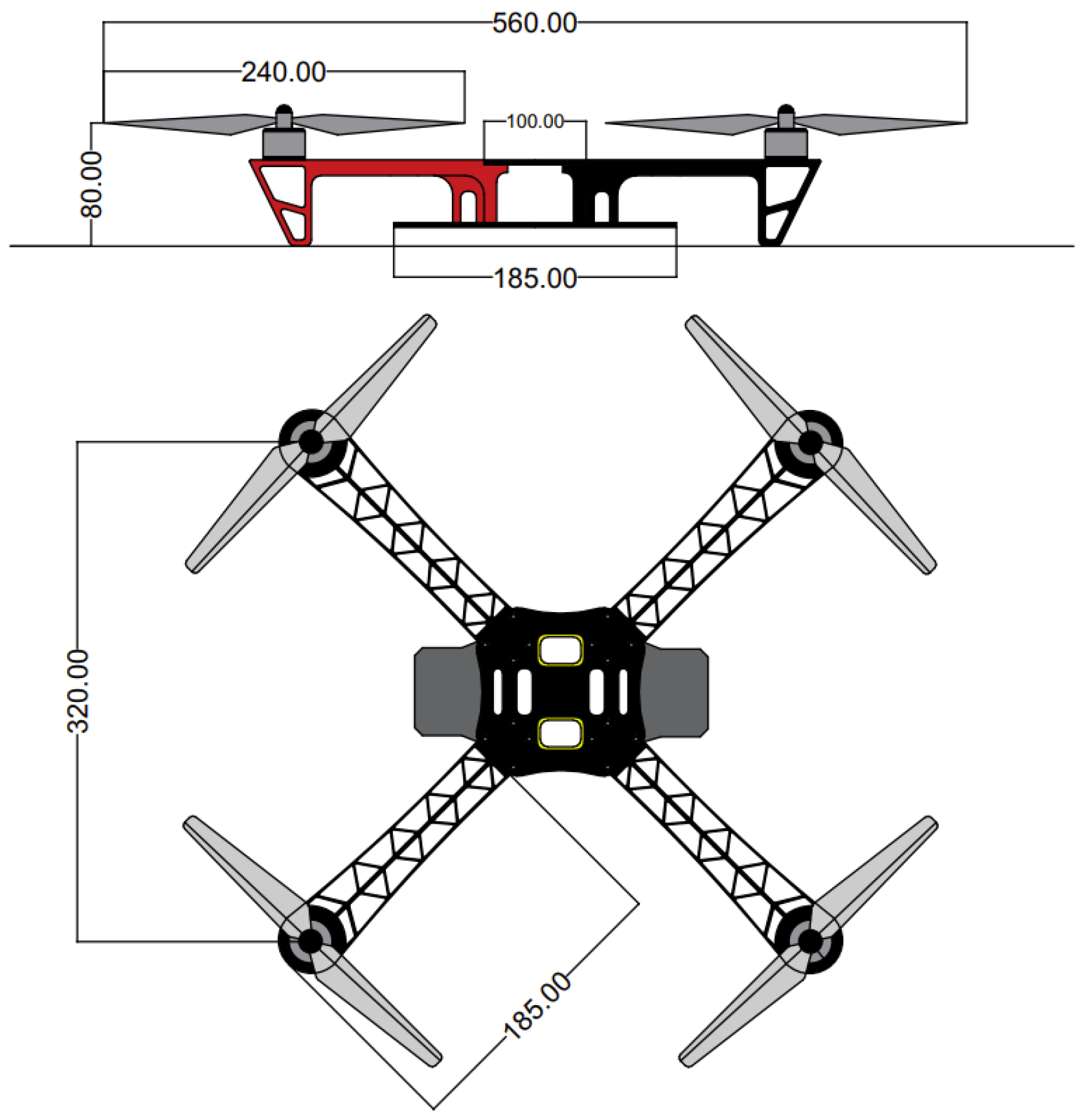
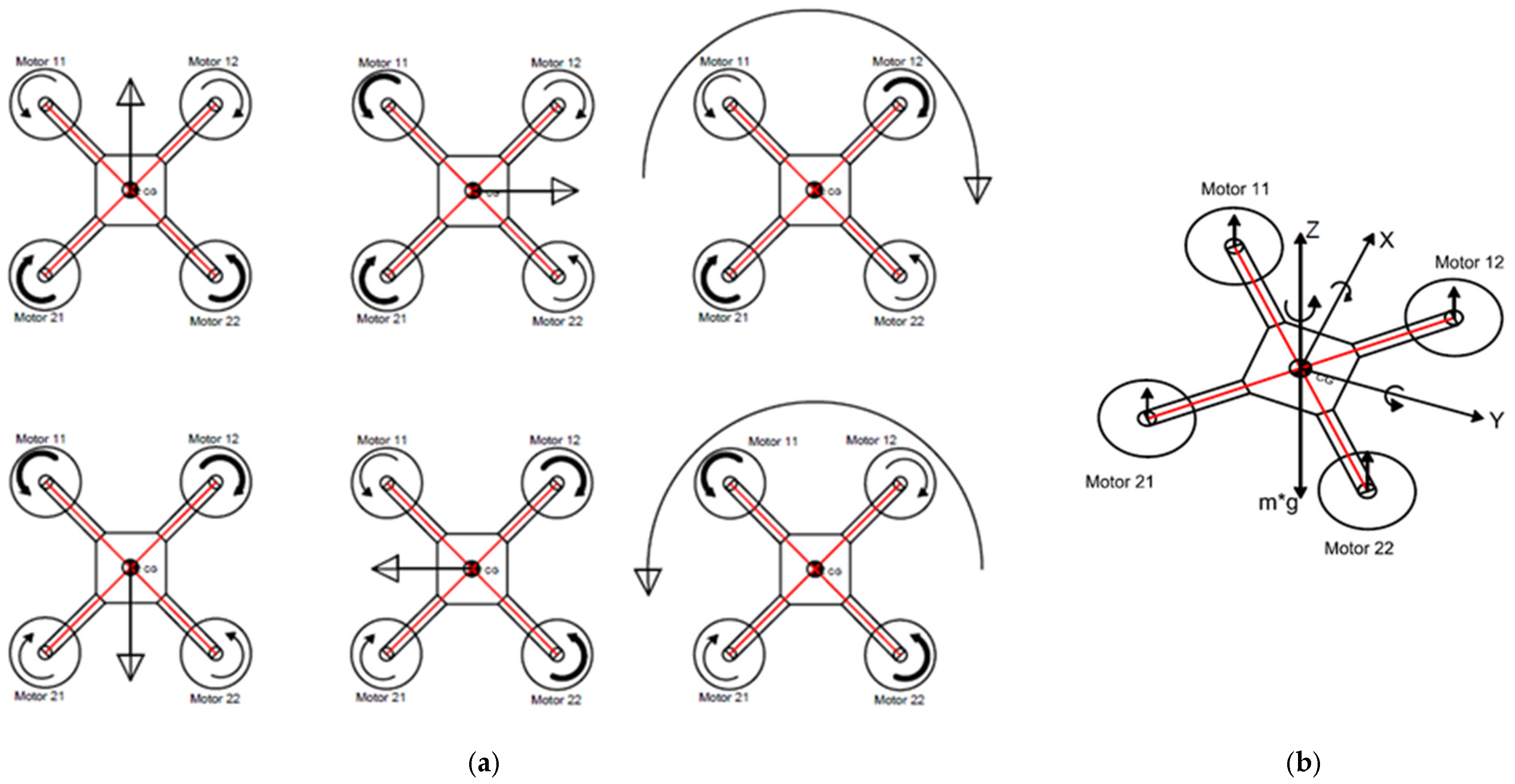
2.1. The Quadrotor Prototype
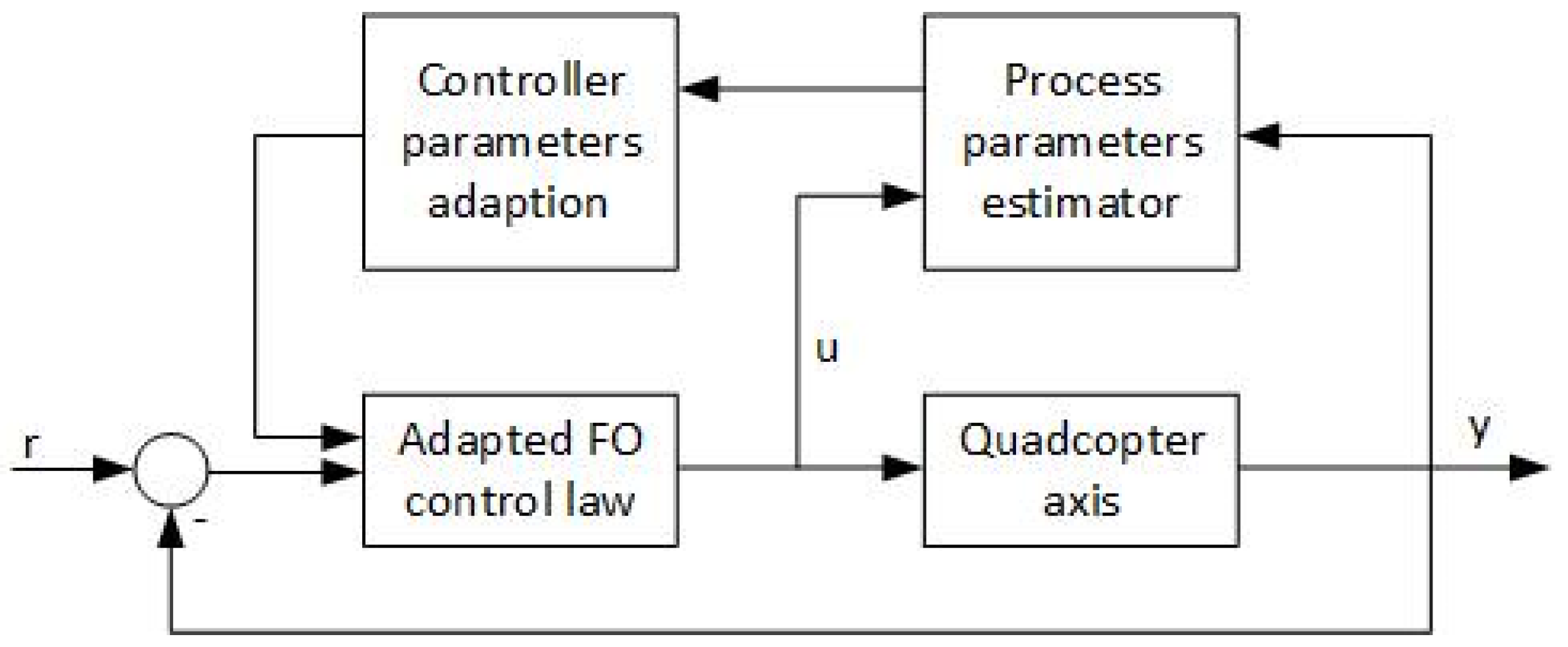
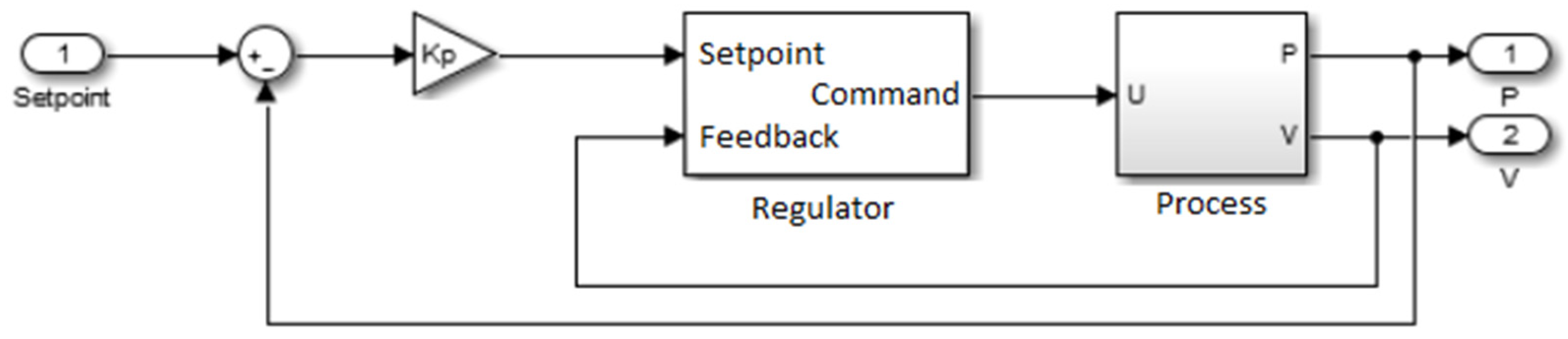
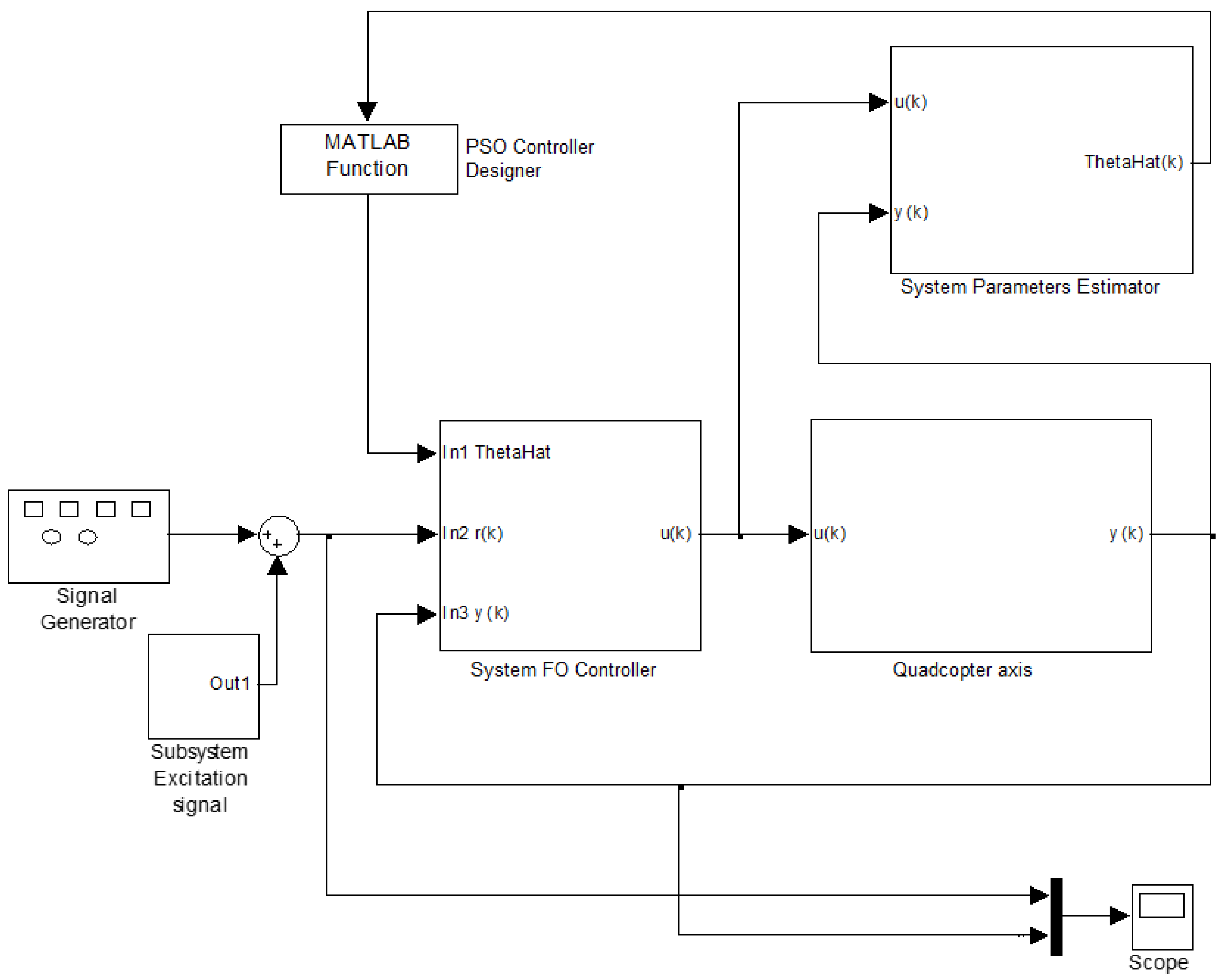
2.2. The Proposed Control Strategy
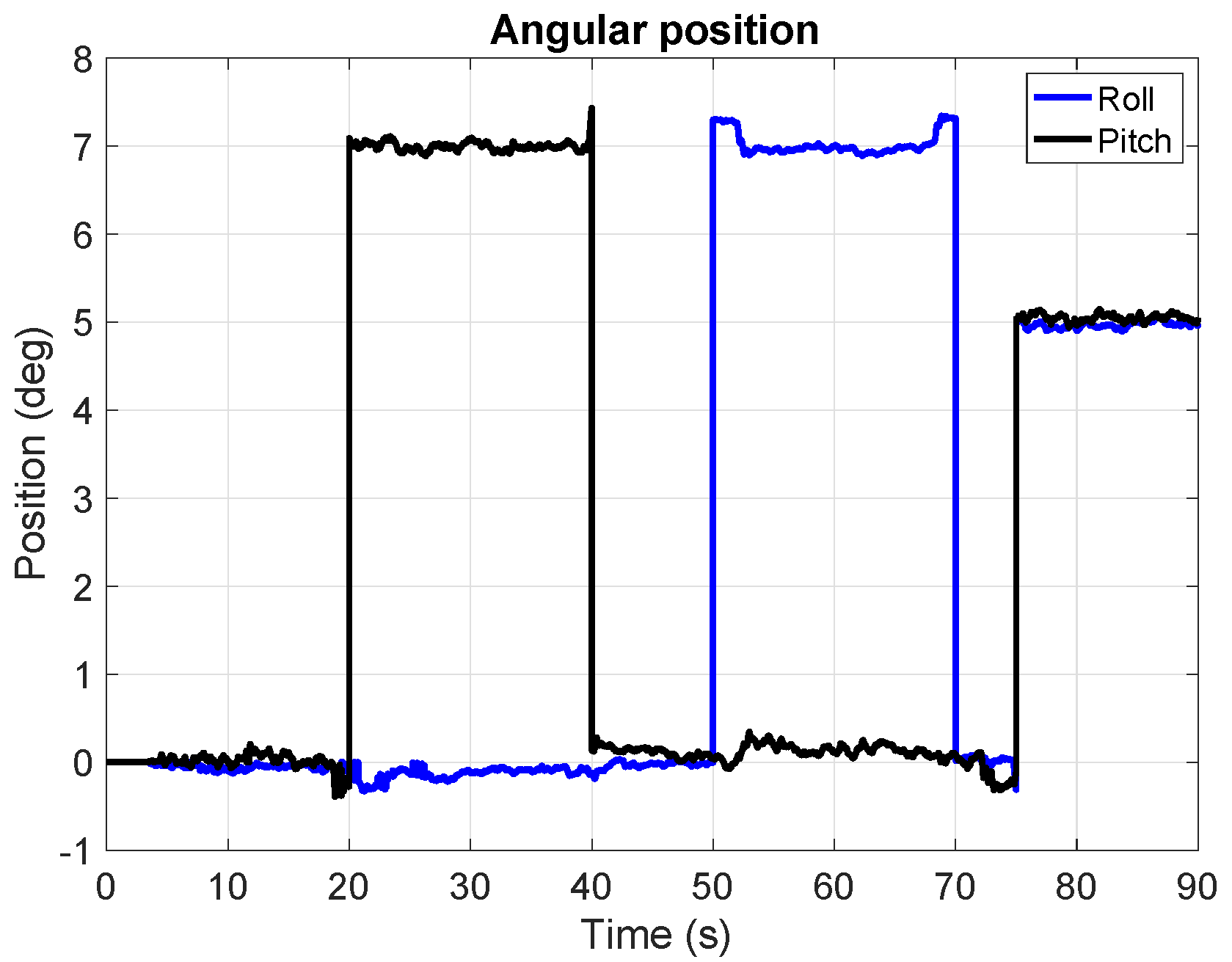
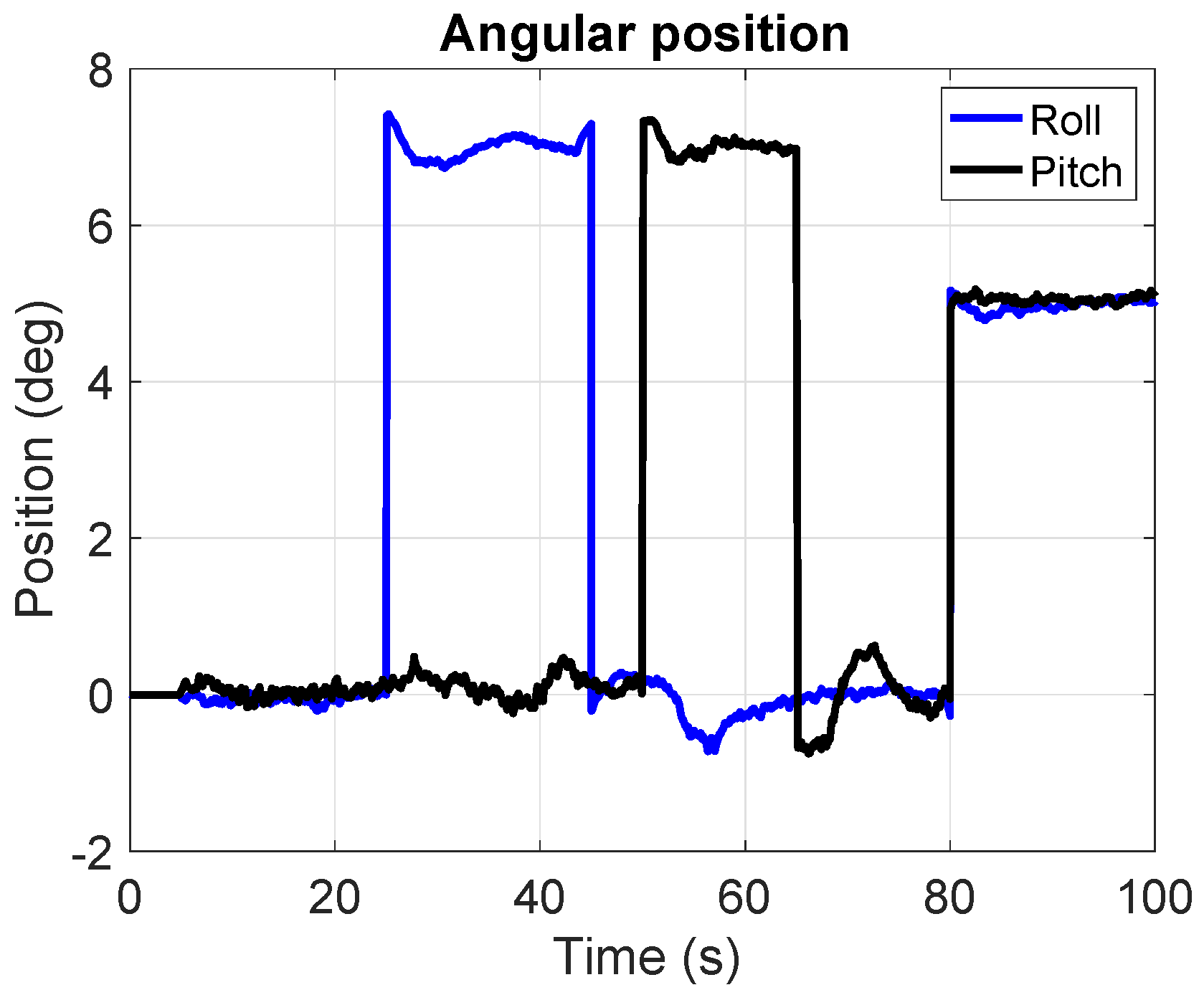
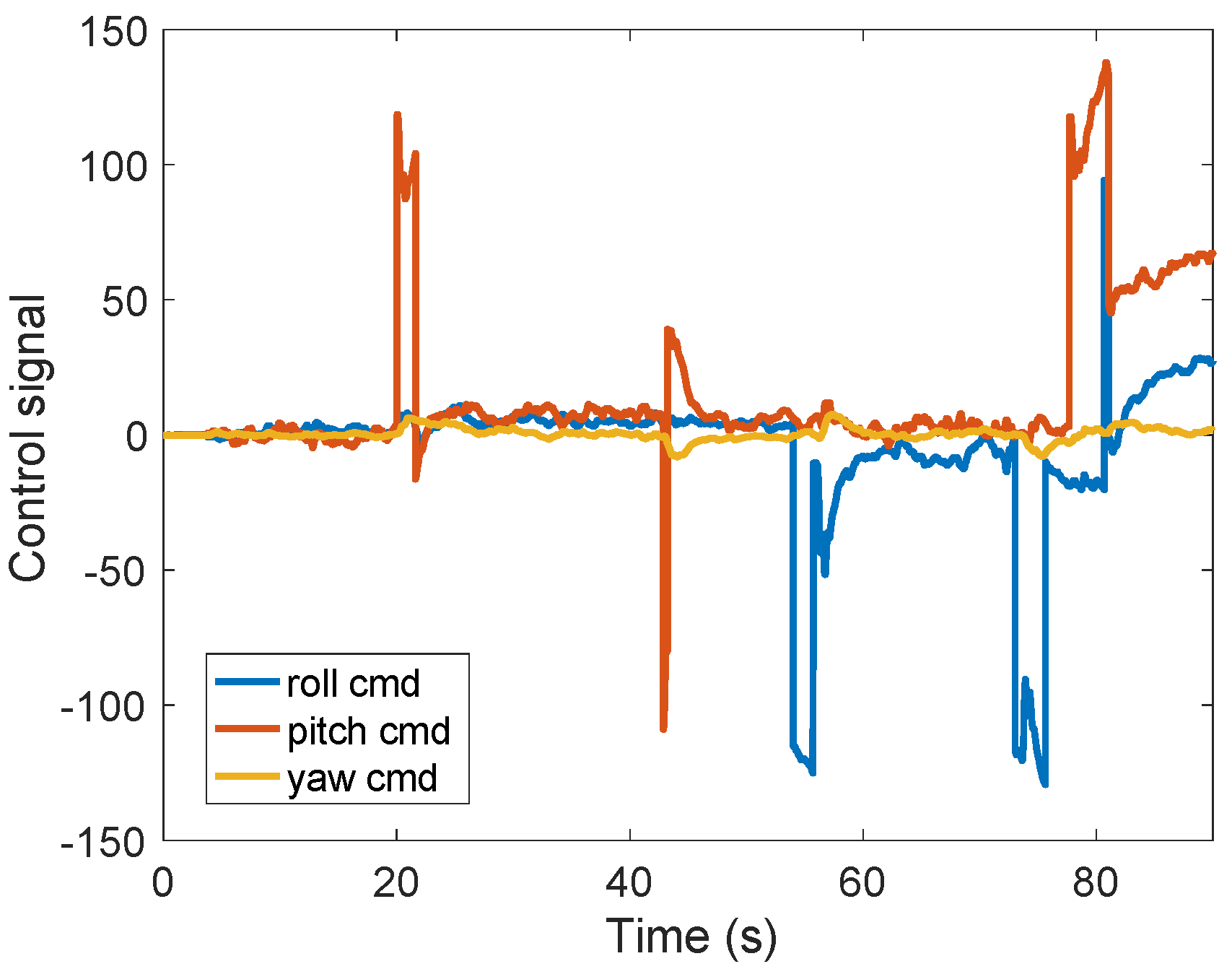
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Altan, A.; Hacioğlu, R. Model predictive control of three-axis gimbal system mounted on UAV for real-time target tracking under external disturbances. Mech. Syst. Signal Process. 2020, 138, 106548. [Google Scholar] [CrossRef]
- Wang, B.; Yu, X.; Mu, L.; Zhang, Y. Disturbance observer-based adaptive fault-tolerant control for a quadrotor helicopter subject to parametric uncertainties and external disturbances. Mech. Syst. Signal Process. 2018, 120, 727–743. [Google Scholar] [CrossRef]
- Becerra, V.M. Autonomous Control of Unmanned Aerial Vehicles. Electronics 2019, 8, 452. [Google Scholar] [CrossRef] [Green Version]
- Jatsun, S.; Emelyanova, O.; Leon, A.S.M. Design of an Experimental Test Bench for a UAV Type Convertiplane. IOP Conf. Ser. Mater. Sci. Eng. 2020, 714, 012009. [Google Scholar] [CrossRef]
- Dulf, E.H.; Saila, M.; Muresan, C.I.; Miclea, L.C. An Efficient Design and Implementation of a Quadrotor Unmanned Aerial Vehicle Using Quaternion-Based Estimator. Mathematics 2020, 8, 1829. [Google Scholar] [CrossRef]
- Cajo, R.; Mac, T.T.; Plaza, D.; Copot, C.; De Keyser, R.; Ionescu, C. A Survey on Fractional Order Control Techniques for Unmanned Aerial and Ground Vehicles. IEEE Access 2019, 7, 66864–66878. [Google Scholar] [CrossRef]
- Efe, M. Battery power loss compensated fractional order sliding mode control of a quadrotor UAV. Asian J. Control 2011, 14, 413–425. [Google Scholar] [CrossRef]
- Feng, G.; Xiao-Ping, Z. Research on fractional order two-degrees-of-freedom flight control technology of unmanned air vehicle. In Proceedings of the 2012 International Conference on Computer Science and Information Processing (CSIP), Xi’an, China, 24–26 August 2012; pp. 807–812. [Google Scholar]
- Chao, H.; Luo, Y.; Di, L.; Chen, Y.Q. Roll-channel fractional order controller design for a small fixed-wing unmanned aerial vehicle. Control Eng. Pract. 2010, 18, 761–772. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.; Di, L.; Chao, H. Lateral directional fractional order (PI)α control of a small fixed-wing unmanned aerial vehicles: Controller designs and flight tests. IET Control Theory Appl. 2011, 5, 2156–2167. [Google Scholar] [CrossRef]
- Han, J.; Di, L.; Coopmans, C.; Chen, Y. Pitch Loop Control of a VTOL UAV Using Fractional Order Controller. J. Intell. Robot. Syst. 2013, 73, 187–195. [Google Scholar] [CrossRef]
- Vahdanipour, M.; Khodabandeh, M. Adaptive fractional order sliding mode control for a quadrotor with a varying load. Aerosp. Sci. Technol. 2019, 86, 737–747. [Google Scholar] [CrossRef]
- Souza, A.G.; Souza, L. Design of a controller for a rigid-flexible satellite using the H-infinity method considering the parametric uncertainty. Mech. Syst. Signal Process. 2018, 116, 641–650. [Google Scholar] [CrossRef]
- Noormohammadi-Asl, A.; Esrafilian, O.; Arzati, M.A.; Taghirad, H.D. System identification and H∞-based control of quadrotor attitude. Mech. Syst. Signal Process. 2019, 135, 106358. [Google Scholar] [CrossRef]
- Muresan, C.I.; Birs, I.; Ionescu, C.; Dulf, E.H.; De Keyser, R. A Review of Recent Developments in Autotuning Methods for Fractional-Order Controllers. Fractal Fract. 2022, 6, 37. [Google Scholar] [CrossRef]
- Dulf, E.-H. Simplified Fractional Order Controller Design Algorithm. Mathematics 2019, 7, 1166. [Google Scholar] [CrossRef] [Green Version]
- Dulf, E.H.; Timis, D.D.; Muresan, C.I. Robust Fractional Order Controllers for Distributed Systems. Acta Polytehnica Hung. 2017, 14, 163–176. [Google Scholar]
- Muresan, C.I.; Birs, I.R.; Dulf, E.H. Event-Based Implementation of Fractional Order IMC Controllers for Simple FOPDT Processes. Mathematics 2020, 8, 1378. [Google Scholar] [CrossRef]
- Huang, C.; Li, H.; Cao, J. A novel strategy of bifurcation control for a delayed fractional predator–prey model. Appl. Math. Comput. 2018, 347, 808–838. [Google Scholar] [CrossRef]
- Huang, C.; Wang, J.; Chen, X.; Cao, J. Bifurcations in a fractional-order BAM neural network with four different delays. Neural Networks 2021, 141, 344–354. [Google Scholar] [CrossRef]
- Dulf, E.; Muresan, C.I.; Timis, D.D. Adaptive Fractional Order Control of a Quadrotor. In Proceedings of the 15th International Conference on Dyanmical Systems Theory and Applications (DSTA 2019), Lodz, Poland, 2–5 December 2019. [Google Scholar]
- Laporte-Fauret, Q.; Marieu, V.; Castelle, B.; Michalet, R.; Bujan, S.; Rosebery, D. Low-Cost UAV for high-resolution and large-scale coastal dune change monitoring using photogrammetry. J. Mar. Sci. Eng. 2019, 7, 63. [Google Scholar] [CrossRef] [Green Version]
- Balas, C. Modelling and Linear Control of a Quadrotor. Master’s Thesis, Cranfield University, Cranfield, UK, 2007. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.96.8228&rep=rep1&type=pdf (accessed on 19 March 2022).
- Ai, L.; Xu, Y.; Deng, L.; Teo, K. Least Squares Support Vector Machine-Based Multivariate Generalized Predictive Control for Parabolic Distributed Parameter Systems with Control Constraints. Symmetry 2021, 13, 453. [Google Scholar] [CrossRef]
- Kaba, A.; Ermeydan, A.; Kiyak, E. Model Derivation, Attitude Control and Kalman Filter Estimation of a Quadcopter. In Proceedings of the 2017 4th International Conference on Electrical and Electronic Engineering (ICEEE), Ankara, Turkey, 8–10 April 2017; pp. 210–214. [Google Scholar]
- Podlubny, I. Fractional-Order Systems and PIλDμ–Controllers. IEEE Trans. Autom. Control 1999, 44, 208–213. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A New Optimizer Using Particle Swarm Theory. In Proceedings of the 6th International Symposium Micro Machine and Human Science (MHS), Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I 2000, 47, 25–39. [Google Scholar] [CrossRef]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Timis, D.D.; Muresan, C.I.; Dulf, E.-H. Design and Experimental Results of an Adaptive Fractional-Order Controller for a Quadrotor. Fractal Fract. 2022, 6, 204. https://doi.org/10.3390/fractalfract6040204
Timis DD, Muresan CI, Dulf E-H. Design and Experimental Results of an Adaptive Fractional-Order Controller for a Quadrotor. Fractal and Fractional. 2022; 6(4):204. https://doi.org/10.3390/fractalfract6040204
Chicago/Turabian StyleTimis, Daniel D., Cristina I. Muresan, and Eva-H. Dulf. 2022. "Design and Experimental Results of an Adaptive Fractional-Order Controller for a Quadrotor" Fractal and Fractional 6, no. 4: 204. https://doi.org/10.3390/fractalfract6040204
APA StyleTimis, D. D., Muresan, C. I., & Dulf, E.-H. (2022). Design and Experimental Results of an Adaptive Fractional-Order Controller for a Quadrotor. Fractal and Fractional, 6(4), 204. https://doi.org/10.3390/fractalfract6040204