



Dynamic Event-Triggered Consensus for Fractional-Order Multi-Agent Systems without Intergroup Balance Condition
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- By employing the related state information between each agent and its neighbors, a control protocol is developed to guarantee the leader–following group consensus of fractional-order multi-agent systems without intergroup balance condition.
- (2)
- To reduce the frequency of state information updates, the DETM is firstly adopted to the leader–following group consensus of fractional-order multi-agent systems.
- (3)
- Several easy-to-check criteria are derived to assure the required consensus performance and exclude the Zeno behavior.
2. Model Description and Preliminaries
2.1. Graph Theory
2.2. Fractional-Order System with Caputo-Type Derivative
2.3. Model Description
3. Main Results
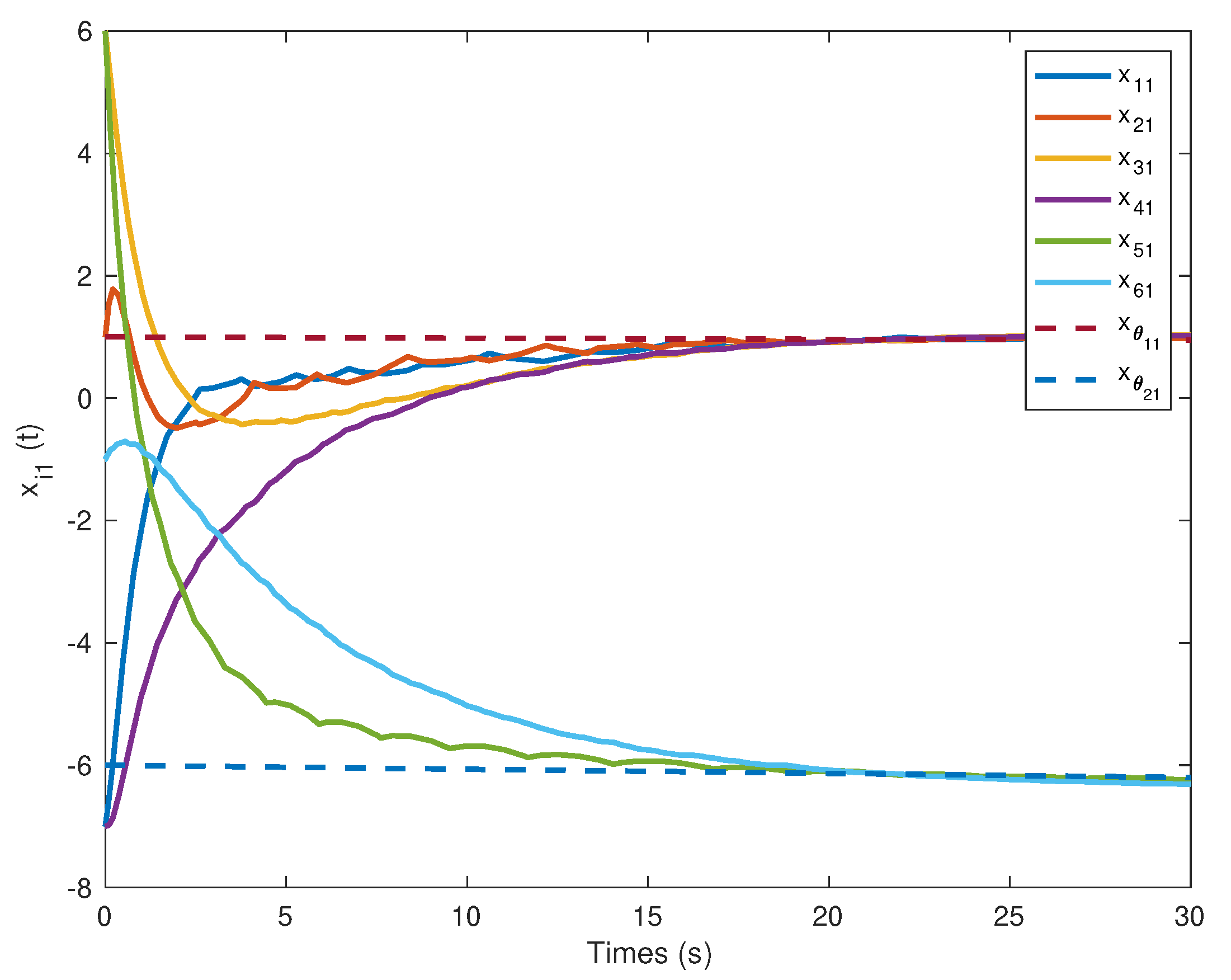
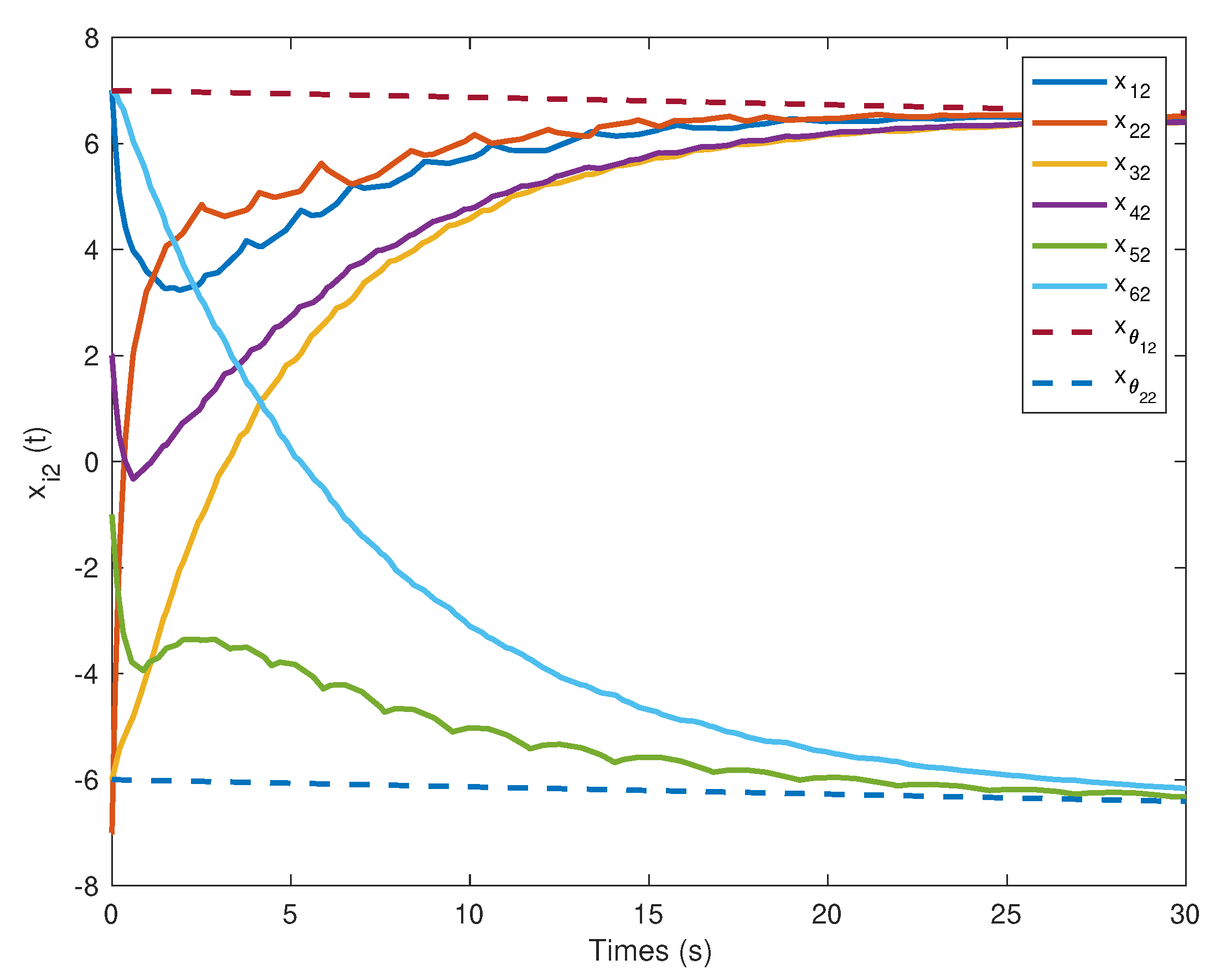
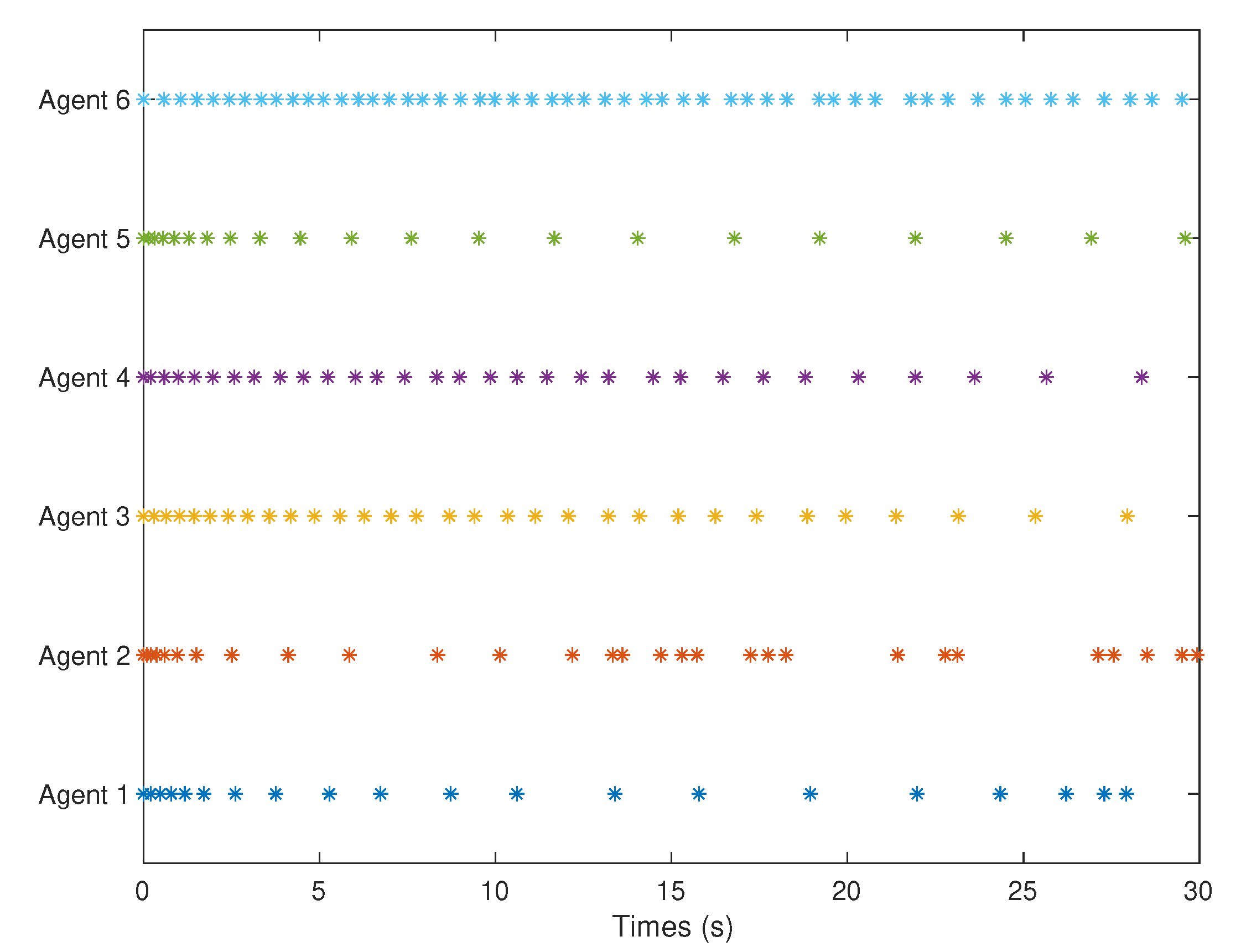
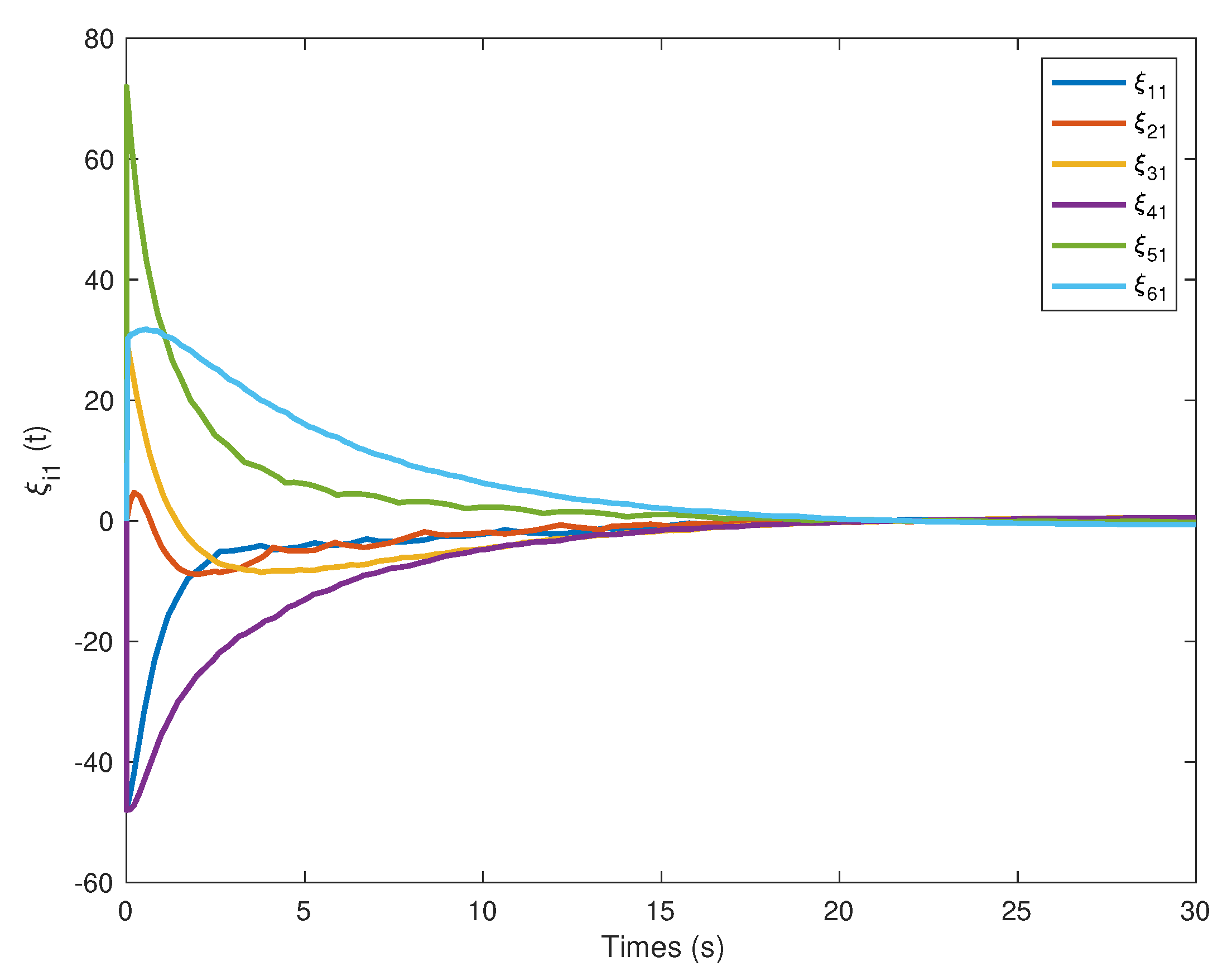
4. An Example and Illustrations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kwa, H.; Kit, J.; Bouffanais, R. Optimal swarm strategy for dynamic target search and tracking. In Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, Auckland, New Zealand, 9–13 May 2020; pp. 672–680. [Google Scholar]
- Hu, Z.; Ma, L.; Wang, B.; Zou, L.; Bo, Y. Finite-time consensus control for heterogeneous mixed-order nonlinear stochastic multi-agent systems. Syst. Sci. Control Eng. 2021, 9, 405–416. [Google Scholar] [CrossRef]
- He, W.; Xu, B.; Han, Q.L.; Qian, F. Adaptive consensus control of linear multi-agent systems with dynamic event-triggered strategies. IEEE Trans. Cybern. 2020, 50, 2996–3008. [Google Scholar] [CrossRef] [PubMed]
- Du, S.L.; Liu, T.; Ho, D.W. Dynamic event-triggered control for leader-following consensus of multi-agent systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3243–3251. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L.; Ding, L.; Wang, Y.L.; Zhang, X.M. Dynamic event-triggered distributed coordination control and its applications: A survey of trends and techniques. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3112–3125. [Google Scholar] [CrossRef]
- Yi, X.; Liu, K.; Dimarogonas, D.V.; Johansson, K.H. Distributed dynamic event-triggered control for multi-agent systems. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 6683–6698. [Google Scholar]
- Su, Y.; Cai, H.; Huang, J. The Cooperative Output Regulation by the Distributed Observer Approach. Int. J. Netw. Dyn. Intell. 2022, 1, 20–35. [Google Scholar] [CrossRef]
- Bao, G.; Ma, L.; Yi, X. Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: A survey. Syst. Sci. Control Eng. 2022, 10, 539–551. [Google Scholar] [CrossRef]
- Li, B.; Wang, Z.; Han, Q.L.; Liu, H. Distributed Quasiconsensus Control for Stochastic Multiagent Systems Under Round-Robin Protocol and Uniform Quantization. IEEE Trans. Cybern. 2022, 52, 6721–6732. [Google Scholar] [CrossRef]
- Xing, M.; Lu, J.; Liu, Y.; Chen, X. Event-Based Bipartite Consensus of Multi-Agent Systems Subject to DoS Attacks. IEEE Trans. Netw. Sci. Eng. 2023, 10, 68–80. [Google Scholar] [CrossRef]
- Du, H.; Wen, G.; Chen, G.; Cao, J.; Alsaadi, F.E. A distributed finite-time consensus algorithm for higher-order leaderless and leader-following multiagent systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1625–1634. [Google Scholar] [CrossRef]
- Min, X.; Baldi, S.; Yu, W. Finite-Time Distributed Control of Nonlinear Multiagent Systems via Funnel Technique. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1256–1267. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, H.; Park, J.H.; Huang, J.; Wang, X.; Lv, M. Adaptive Fuzzy Control for Unknown Nonlinear Multi-Agent Systems with Switching Directed Communication Topologies. IEEE Trans. Fuzzy Syst. 2023, 1–8. [Google Scholar] [CrossRef]
- Niu, K.; Wardi, Y.; Abdallah, C.T.; Hayajneh, M. Consensus Controller for Heterogeneous Multi-Agent Systems Using Output Prediction. IEEE Control Syst. Lett. 2023, 7, 673–678. [Google Scholar] [CrossRef]
- Wang, Q.; Dong, X.; Wang, B.; Hua, Y.; Ren, Z. Finite-time Observer-based H∞ Fault-tolerant Output Formation Tracking Control for Heterogeneous Nonlinear Multi-agent Systems. IEEE Trans. Netw. Sci. Eng. 2023, 1–13. [Google Scholar] [CrossRef]
- Shang, Y.; Ye, Y. Leader-follower fixed-time group consensus control of multiagent systems under directed topology. Complexity 2017, 2017, 3465076. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wu, H.; Cao, J. Group Consensus in Finite Time for Fractional Multiagent Systems With Discontinuous Inherent Dynamics Subject to Hölder Growth. IEEE Trans. Cybern. 2022, 52, 4161–4172. [Google Scholar] [CrossRef]
- Hu, A.; Cao, J.; Hu, M.; Guo, L. Event-triggered group consensus for multi-agent systems subject to input saturation. J. Frankl. Inst. 2018, 355, 7384–7400. [Google Scholar] [CrossRef]
- Wen, G.; Huang, J.; Wang, C.; Chen, Z.; Peng, Z. Group consensus control for heterogeneous multi-agent systems with fixed and switching topologies. Int. J. Control 2016, 89, 259–269. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Diethelm, K. The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Ren, G.; Yu, Y.; Zhang, S. Leader-following consensus of fractional nonlinear multi-agent systems. Math. Probl. Eng. 2015, 2015, 919757. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.Q.; Liu, T.Y.; Kang, Y.; Zhao, Y.B. Leader-Following Cluster Consensus of Multiagent Systems With Measurement Noise and Weighted Cooperative–Competitive Networks. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1150–1159. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.; Wang, H. Mittag-Leffler stability of fractional-order Hopfield neural networks. Nonlinear Anal. Hybrid Syst. 2015, 16, 104–121. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, C.; Roohi, M. Design of a model-free adaptive sliding mode control to synchronize chaotic fractional-order systems with input saturation: An application in secure communications. J. Frankl. Inst. 2021, 358, 8109–8137. [Google Scholar] [CrossRef]
- Roohi, M.; Zhang, C.; Chen, Y. Adaptive model-free synchronization of different fractional-order neural networks with an application in cryptography. Nonlinear Dyn. 2020, 100, 3979–4001. [Google Scholar] [CrossRef]
- Chen, Y.; Song, Q.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Global Mittag-Leffler stability for fractional-order quaternion-valued neural networks with piecewise constant arguments and impulses. Int. J. Syst. Sci. 2022, 53, 1756–1768. [Google Scholar] [CrossRef]
- Wang, F.; Yang, Y. Leader-following consensus of nonlinear fractional-order multi-agent systems via event-triggered control. Int. J. Syst. Sci. 2017, 48, 571–577. [Google Scholar] [CrossRef]
- Ye, Y.; Su, H. Leader-following consensus of nonlinear fractional-order multi-agent systems over directed networks. Nonlinear Dyn. 2019, 96, 1391–1403. [Google Scholar] [CrossRef]
- Pan, L.; Shao, H.; Li, Y.; Li, D.; Xi, Y. Event-Triggered Consensus of Matrix-Weighted Networks Subject to Actuator Saturation. IEEE Trans. Netw. Sci. Eng. 2023, 10, 463–476. [Google Scholar] [CrossRef]
- Wang, M.; Wang, R. Group consensus of fractional order multi-agent systems with fixed topology. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 331–336. [Google Scholar]
- Dai, S.; Wu, Z.; Zhang, P.; Tan, M.; Yu, J. Distributed Formation Control for a Multi-Robotic Fish System with Model-Based Event-Triggered Communication Mechanism. IEEE Trans. Ind. Electron. 2023, 1–10. [Google Scholar] [CrossRef]
- Ren, Y.; Xian, C.; Liu, Y.; Zhao, Y. Distributed Adaptive Event-Triggered TVGF for Generic Linear Multi-Agent Systems under Directed Graph. IEEE Trans. Circuits Syst. II Express Briefs 2023. [Google Scholar] [CrossRef]
- Wang, Z.; Shi, S.; He, W.; Xiao, M.; Cao, J.; Gorbachev, S. Observer-Based Asynchronous Event-Triggered Bipartite Consensus of Multi-Agent Systems Under False Data Injection Attacks. IEEE Trans. Control Netw. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Li, Z.; Hu, J.; Li, J. Distributed filtering for delayed nonlinear system with random sensor saturation: A dynamic event-triggered approach. Syst. Sci. Control Eng. 2021, 9, 440–454. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Cao, J. Global Mittag-Leffler consensus for fractional singularly perturbed multi-agent systems with discontinuous inherent dynamics via event-triggered control strategy. J. Frankl. Inst. 2021, 358, 2086–2114. [Google Scholar] [CrossRef]
- Xu, B.; Li, B. Event-Triggered State Estimation for Fractional-Order Neural Networks. Mathematics 2022, 10, 325. [Google Scholar] [CrossRef]
- Wang, X.; Sun, Y.; Ding, D. Adaptive Dynamic Programming for Networked Control Systems Under Communication Constraints: A Survey of Trends and Techniques. Int. J. Netw. Dyn. Intell. 2022, 85–98. [Google Scholar] [CrossRef]
- Sun, Y.; Tian, X.; Wei, G. Finite-time distributed resilient state estimation subject to hybrid cyber-attacks: A new dynamic event-triggered case. Int. J. Syst. Sci. 2022, 53, 2832–2844. [Google Scholar] [CrossRef]
- Chen, B.; Hu, J.; Zhao, Y.; Ghosh, B.K. Leader-following Consensus of Linear Fractional-order Multi-agent Systems via Event-triggered Control Strategy. IFAC-PapersOnLine 2020, 53, 2909–2914. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, G.; Wang, Y.; Song, C. Distributed event-triggered control of multi-agent systems with combinational measurements. Automatica 2013, 49, 671–675. [Google Scholar] [CrossRef]
- Hu, W.; Liu, L.; Feng, G. Consensus of linear multi-agent systems by distributed event-triggered strategy. IEEE Trans. Cybern. 2015, 46, 148–157. [Google Scholar] [CrossRef]
- Qian, Y.Y.; Liu, L.; Feng, G. Distributed dynamic event-triggered control for cooperative output regulation of linear multi-agent systems. IEEE Trans. Cybern. 2019, 50, 3023–3032. [Google Scholar] [CrossRef]
- Hu, W.; Yang, C.; Huang, T.; Gui, W. A distributed dynamic event-triggered control approach to consensus of linear multi-agent systems with directed networks. IEEE Trans. Cybern. 2018, 50, 869–874. [Google Scholar] [CrossRef]
- Cai, J.; Wang, J.; Feng, J.; Chen, G.; Zhao, Y. Observer-Based Consensus for Multi-Agent Systems with Semi-Markovian Jumping Via Adaptive Event-Triggered SMC. IEEE Trans. Netw. Sci. Eng. 2023, 1–14. [Google Scholar] [CrossRef]
- Tripathy, N.S.; Kar, I.N.; Chamanbaz, M.; Bouffanais, R. Robust stabilization of a class of nonlinear systems via aperiodic sensing and actuation. IEEE Access 2020, 8, 157403–157417. [Google Scholar] [CrossRef]
- Roohi, M.; Aghababa, M.P.; Haghighi, A.R. Switching adaptive controllers to control fractional-order complex systems with unknown structure and input nonlinearities. Complexity 2015, 21, 211–223. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Haghighi, A.R.; Roohi, M. Stabilisation of unknown fractional-order chaotic systems: An adaptive switching control strategy with application to power systems. IET Gener. Transm. Distrib. 2015, 9, 1883–1893. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Li, B. Dynamic Event-Triggered Consensus for Fractional-Order Multi-Agent Systems without Intergroup Balance Condition. Fractal Fract. 2023, 7, 268. https://doi.org/10.3390/fractalfract7030268
Xu B, Li B. Dynamic Event-Triggered Consensus for Fractional-Order Multi-Agent Systems without Intergroup Balance Condition. Fractal and Fractional. 2023; 7(3):268. https://doi.org/10.3390/fractalfract7030268
Chicago/Turabian StyleXu, Bingrui, and Bing Li. 2023. "Dynamic Event-Triggered Consensus for Fractional-Order Multi-Agent Systems without Intergroup Balance Condition" Fractal and Fractional 7, no. 3: 268. https://doi.org/10.3390/fractalfract7030268
APA StyleXu, B., & Li, B. (2023). Dynamic Event-Triggered Consensus for Fractional-Order Multi-Agent Systems without Intergroup Balance Condition. Fractal and Fractional, 7(3), 268. https://doi.org/10.3390/fractalfract7030268