1. Introduction
Various studies have been conducted to investigate the utility of unmanned aerial systems (UASs) and unmanned aerial vehicles (UAVs) as the technologies have developed and popularized. These studies mainly acquire data through UAVs equipped with optical (RGB), multi-spectral, or infrared sensors [
1,
2,
3], and produce 3D point clouds and digital surface models (DSMs) using image processing programs. Before the popularization of UAV technology, satellites, manned aircrafts, and professional surveillance cameras were the prominent methods of data acquisition for research [
4,
5].
The 3D point cloud is a set of data in which each point has a 3D coordinate value. The initial 3D point cloud was acquired through an expensive laser scanner [
6,
7]. However, recently, it could be constructed from images taken with a camera using the Structure from Motion-Multi View Stereo (SfM-MVS) algorithm [
8,
9,
10]. DSM is a 2.5D raster format data generated with stereo images [
5,
11] and is also produced by interpolating point clouds built using the SfM-MVS algorithm [
12,
13]. Image processing results, such as 3D point clouds and DSMs built using UAV images, have been applied to various fields, such as geography, environment, administration, and industry [
14,
15,
16,
17].
Due to the increase in the number of studies that produce and utilize results of UAV image processing, studies that verify their accuracy are also increasing. Parameters that affect the accuracy of results are flight parameters [
18,
19,
20], such as the front and side overlap and flight altitude, interior orientation parameters of the camera [
1,
21,
22,
23], and exterior orientation parameters through ground control points (GCPs) [
24,
25]. The root-mean-square error (RMSE), which statistically represents the errors between the constructed results and the checkpoints (CPs), mainly evaluates the accuracy [
25,
26,
27,
28].
To verify the accuracy of image processing results, studies have been continuously conducted using flight parameters [
18,
29] or the interior orientation parameters and calibration of the camera as variables [
1,
22,
30]. However, the most actively conducted studies on accuracy verification were focused on using the number of GCPs as the variable. Studies on 3D modeling using UAVs mainly used non-measurement cameras and low-cost UAVs [
31,
32,
33,
34], which requires an increasing number of GCPs [
34]. Installing GCPs is labor-intensive and time-consuming work [
35,
36], and human access can be difficult depending on the terrain of the target site (e.g., steep mountain area and rock quarry) and the material of the ground surface (e.g., tidal flat and waste stock). In order to reduce the amount of time and labor required to install the GCPs, a real-time kinematic (RTK) and a post-processing kinematic (PPK) method have been recently introduced [
25,
27,
37]. However, the RTK and PPK methods require expensive devices and need complex technologies that make them difficult to use. Therefore, many studies focus on the number of GCPs installed instead.
Previous studies have suggested the optimal number of GCP. Soo-Bong Lim [
38] mentioned that 10–12 GCPs are appropriate per 100 ha. Yong-ho Yoo et al. [
39] classified the number of GCPs into 0, 3, and 6. They reported that no significant difference exists in the deviation of the horizontal accuracy, depending on the number of GCPs. In contrast, the deviation of vertical accuracy decreased as the number of GCPs increased. Bu-yeol Yun et al. [
40] reported that stable accuracy could be achieved when eight to nine GCPs are used to determine the precise position. Seung-woo Son [
29] mentioned that two to three GCPs should be set per 1 ha to obtain a 3D model with high accuracy, although the number may differ depending on the flight altitude.
The accuracy was high when one GCP was used per 2 ha [
41], and another study noted that one GCP is required per approximately 1.17 ha. This is because no change occurred when the number of GCP was 15 or higher for the study site (17.64 ha) [
42]. A study on the appropriate amount of GCPs, in which more than 100 GCPs were installed in a study site of approximately 12 km
2 (1200 ha), reported that sufficiently high accuracy could be achieved when the number of GCPs was three or less per 100 photographs (a total of 2514 photographs) [
43]. Patricio Martínez-Carricondo et al. [
26] reported that GCPs must be placed at a density of 0.5–1 GCP × ha
−1.
These such studies indicate that 9–12 GCPs are generally required per 100 ha (1 km
2). As previous studies conducted research only in a single site to determine the optimal number of GCPs, the question is whether the results can be applied to study sites with various areas. In summary, when 9–12 GCPs were assumed to be optimal per 100 ha, examining whether the number of GCPs increases (or decreases) as the area increases (or decreases) is necessary. Additionally, the Public Surveying Regulation Using Unmanned Aerial Vehicle enacted recently in South Korea [
44] specifies that nine or more GCPs are required per 1 km
2. However, it does not mention the number of GCPs changes according to the increase or decrease in the target site, and no criterion exists for areas less than 100 ha. 3D point clouds and DSMs were frequently constructed using UAVs in sites smaller than 100 ha [
45,
46,
47] due to technical limitations, such as battery shortages [
48,
49,
50], hence the need for research on GCP setting for various target sites.
In this study, the accuracy of 3D point clouds and DSMs were analyzed in three study sites with different areas according to the number of GCPs to determine the optimal number of GCPs, which is required when 3D modeling is performed for target sites with different areas using UAVs.
4. Discussion
As mentioned in the introduction, the number of GCPs used in the study is important for performing absolute orientation in UAV surveys [
24,
53] because installing GCPs is not only labor intensive but also time consuming [
35,
36]. In addition, a large number of GCPs may increase the time required to mark drone images during image processing. Therefore, determining the optimal number of GCPs to construct 3D point clouds and DSMs is significant as it enables time-efficient work without wasting labor.
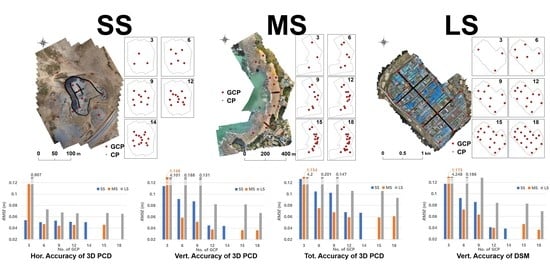
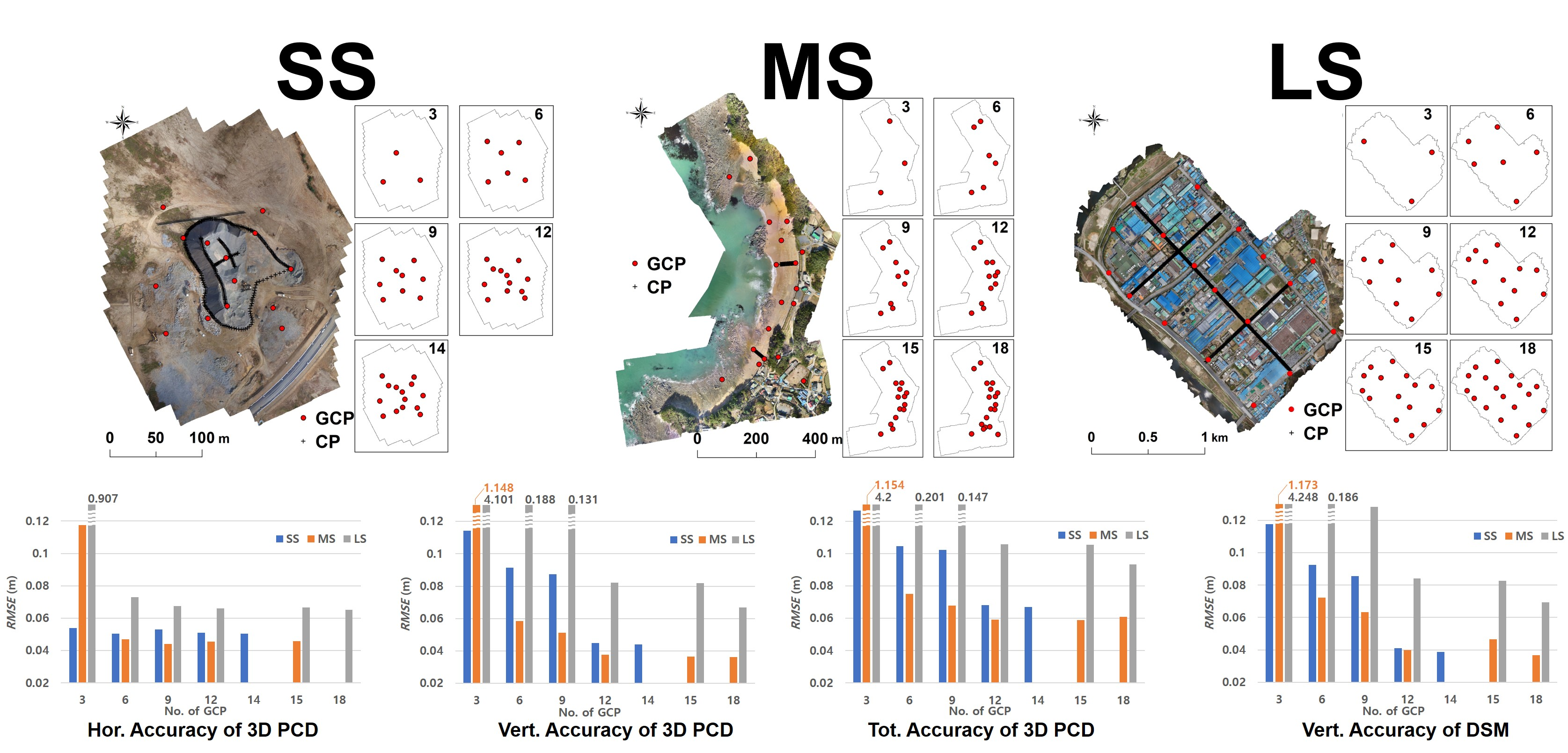
To find the optimal number of GCPs according to each target sites area, the accuracy of the 3D point clouds and DSMs was calculated according to the number of GCPs. GCPs were evenly distributed in each target site so that the GCP network could form a central point polygon capable of covering the site [
26,
43,
54].
Drone modeling has various end-users, and each end-user requires different types of accuracy (vertical, horizontal, or total accuracy) depending on their needs. Therefore, the horizontal, vertical, and total accuracy were calculated individually. Whether this accuracy met the horizontal/vertical accuracy criteria of the American Society for Photogrammetry and Remote Sensing (ASPRS) was assessed [
25]. In the Accuracy Quality criteria of ASPRS, the ground sample distance (GSD) of the original image becomes the judgment criterion of accuracy for horizontal accuracy, but the vertical accuracy only distinguishes the absolute accuracy. However, all of the three study sites were non-vegetated terrains. Therefore, non-vegetated in the vertical accuracy class was considered for the judgment of the accuracy (
Table 6).
4.1. Horizontal Errors and RMSEs of 3D Point Clouds
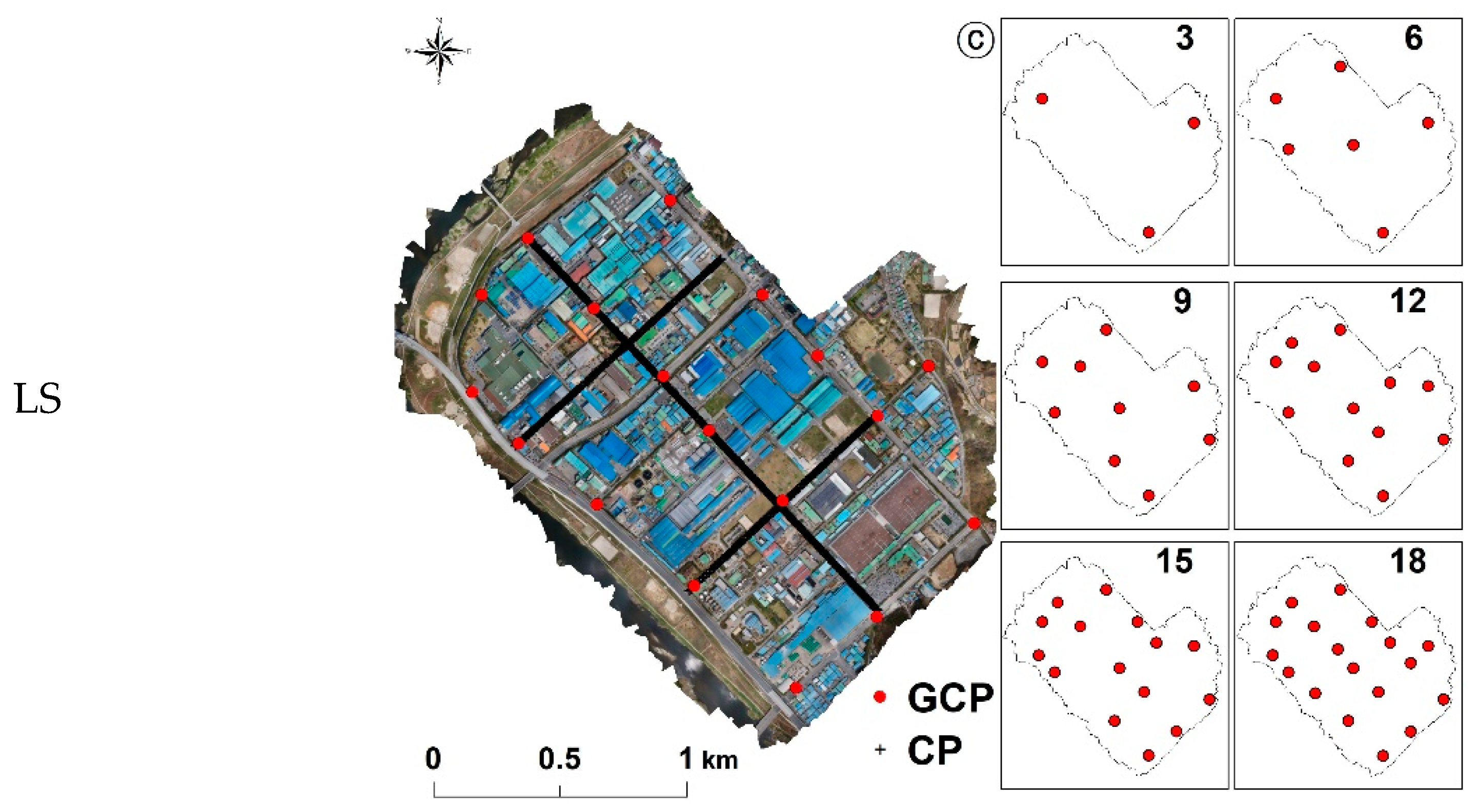
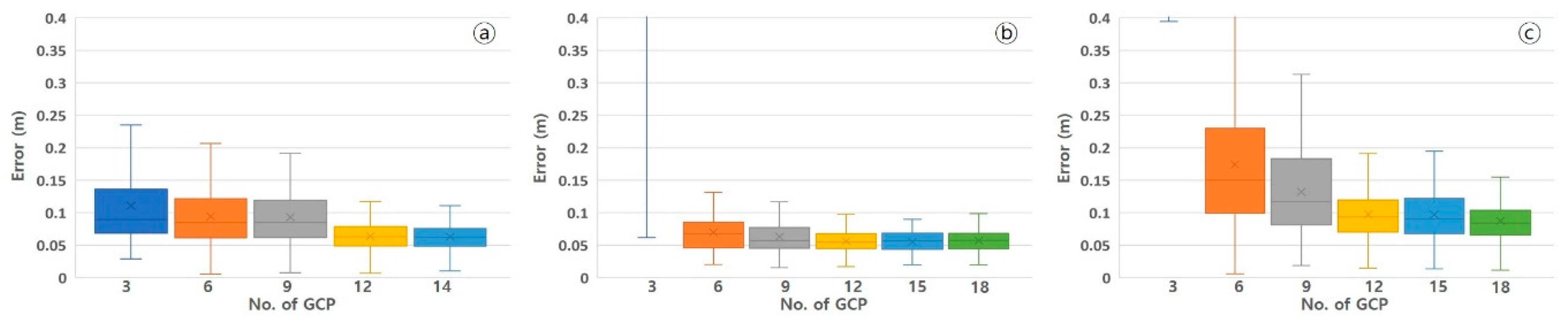
In the SS, the average horizontal errors were 0.05 m for three GCPs and 0.047 m for 14 GCPs. The smallest average horizontal error was 0.046 m when using six GCPs. The standard deviation ranged from 0.019 to 0.020 m, indicating no significant difference between whether the number of GCPs was the largest and the smallest. RMSE also ranged from 0.050 to 0.054 m, corresponding to the range of less than 2 * GSD (5.94 cm) in all cases. In summary, using only three GCPs in the small area of the SS met the horizontal position accuracy criterion of ASPRS. Therefore, using only three GCPs is sufficient when only considering the horizontal accuracy.
The average horizontal error of the MS exceeded 0.1 m when the number of GCPs was three and became smaller when it was six. The error was the smallest (0.041 m) when the number of GCPs was nine. The standard deviation was 0.055 m for three GCPs and sharply decreased from six GCPs with a range of 0.014 to 0.016 m when the number of GCPs was between 6 and 18. RMSE was also inaccurate (approximately 5 * GSD) when three GCPs were used but exhibited an accuracy of less than 2 * GSD (5.38 cm) from six GCPs. As the horizontal accuracy criterion of ASPRS could be met when the number of GCPs was six or larger for the area of the MS, it is necessary to secure at least six GCPs when only the horizontal accuracy is considered.
The accuracy trend of the LS, according to the number of GCPs was very similar to that of the MS. When the number of GCPs was three, the average horizontal error was 0.453 m. However, the error sharply decreased and ranged from 0.061 to 0.067 m when the number of GCPs was between 6 and 18. The standard deviation also decreased from 0.78 m to 0.023–0.028 m when the number of GCPs increased from three. RMSE was also excessively large (close to 1 m) when the number of GCPs was three but decreased to less than 2 * GSD with six GCPs. This indicates that using at least six GCPs can meet the horizontal accuracy criterion of ASPRS for sites whose area is similar to or larger than that of the MS.
4.2. Vertical Errors and RMSEs of 3D Point Clouds
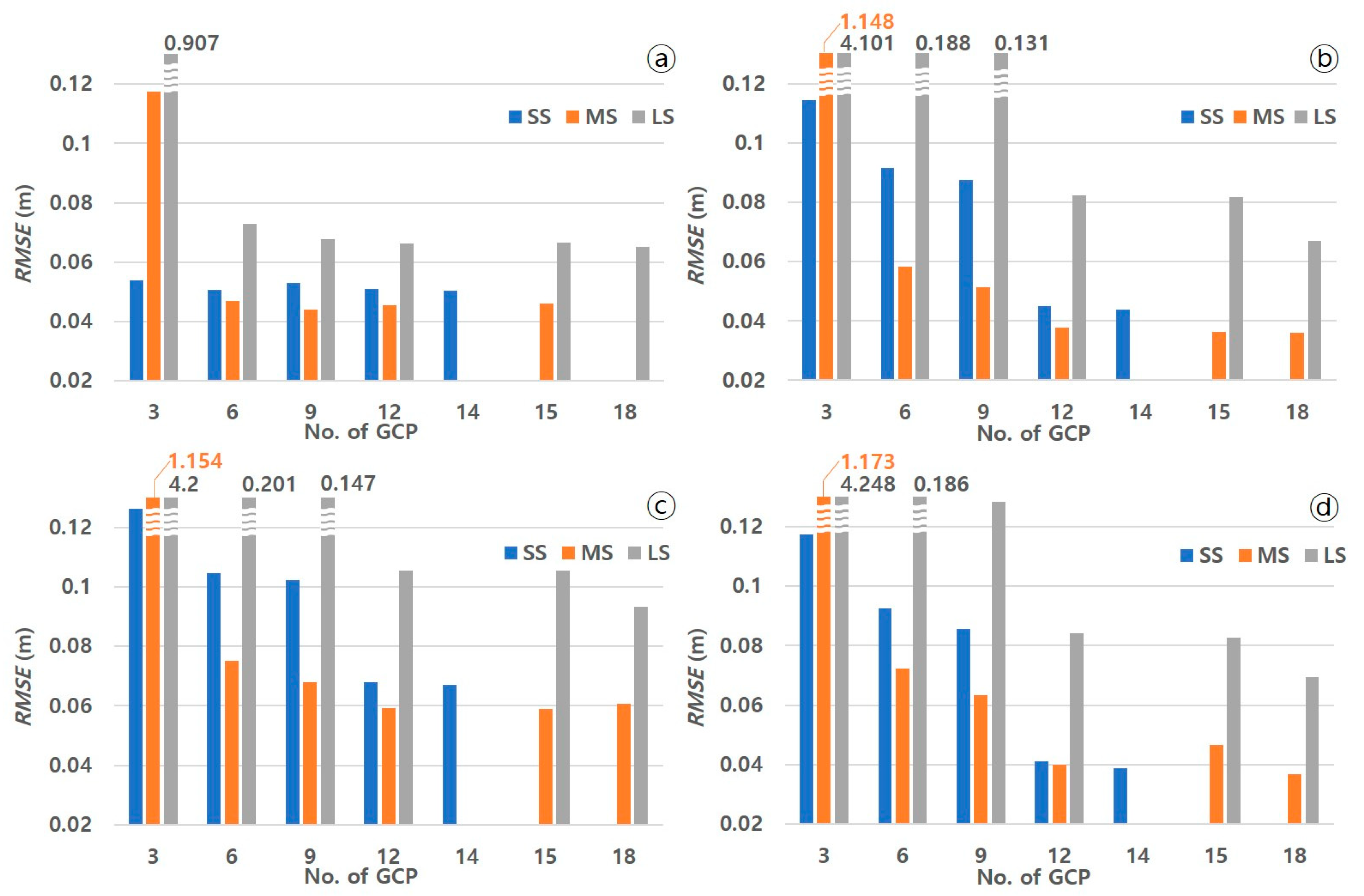
In the SS, the average vertical error was the largest (−0.063 m) when the number of GCPs was three. As the number increased, the error slowly decreased and showed a tendency to converge to zero. The difference between the two cases was only 1 mm when using 12 and 14 GCPs. The standard deviation was also the largest for three GCPs. However, it slowly decreased and there was a small difference when 12 and 14 GCPs were used. RMSE also exceeded 0.1 m for three GCPs but was less than 0.1 m for six and nine GCPs. It was close to 0.04 m from 12 GCPs. These results indicate that at least six GCPs must be installed in small areas, such as SS, considering the vertical accuracy and that at least 12 GCPs must be used to achieve the 5 cm class of ASPRS.
The average vertical error of the MS was very inaccurate (approximately −0.9 m) with three GCPs. As the number increased from 6 to 12, the average vertical error tended to decrease, reaching −0.027 m when it was 12. The error was −0.018 m when 15 and 18 GCPs were used. The standard deviation amounted to 0.7 m when the number of GCPs was three. It was 0.036 m for six GCPs and approximately 0.03 m from nine GCPs. RMSE was 1.148 m for three GCPs and slightly exceeded 0.005 m for six and nine GCPs. It was close to 0.03 m from 12 GCPs. In summary, excellent accuracy could be secured for MS with six GCPs as in SS when considering the vertical position accuracy, the accuracy within 5 cm class was observed when 12 or more GCPs were used.
In the LS, the error was close to 3.8 m with three GCPs, and it exceeded 0.1 m even when the number increased to six. The error was 0.06 m for nine GCPs, and it recorded a stable error range only when the number of GCPs reached 12. The standard deviation also recorded a vast difference when the number of GCPs increased from three to nine but became less than 0.08 m when 12 GCPs were used. The RMSE of the LS became less than 0.1 m from 12 GCPs, unlike the SS and MS, which exhibited excellent accuracy from six GCPs, and the LS exhibiting the highest accuracy using 18 GCPs. In the LS with a large area, the accuracy showed a tendency to improve as the number of GCPs increased. Therefore, higher accuracy could have been achieved through the use of more GCPs. In many cases, however, UAV modeling is not performed in large areas, such as in LS [
45].
4.3. Total Errors and RMSEs of 3D Point Clouds
While the horizontal and vertical errors represent xy- and z-direction errors, the total error determines the 3D error in the xyz direction. The mean total errors of the SS were approximately 1 m with three, six, and nine GCPs were used. They significantly decreased to 0.064 and 0.063 m when 12 and 14 GCPs were used. The standard deviation also exhibited the smallest difference when 12 or more GCPs were used. RMSE exceeded 0.1 m for three and six GCPs and presented the best results (0.068 and 0.067 m) when 12 and 14 GCPs were used. Therefore, for the area of the SS, 12 or more GCPs must be used to obtain high accuracy when considering the total accuracy.
In the case of the MS, the average error slightly changed by millimeters from 12 GCPs, which is also true of the standard deviation and RMSE. As RMSE converged to less than 0.06 m from 12 GCPs, it is necessary to install 12 or more GCPs to obtain high accuracy.
In the LS, the average error, standard deviation, and RMSE were significantly reduced when 12 or more GCPs were used as in MS. RMSE was approximately 0.08 m from 12 GCPs. However, the difference in the MS is that the error and standard deviation were somewhat reduced when 18 GCPs were used compared to 12 and 15 GCPs. Thus, 12 or more GCPs must be used to secure high accuracy in large areas, such as LS. If more than 18 GCPs are used, this may increase the accuracy slightly.
4.4. Vertical Errors and RMSEs of DSMs
As DSMs are produced by interpolating 3D point clouds, their accuracy is similar to that of 3D point clouds. In the SS, the average vertical error of DSM was the largest when the number of GCPs was three. It decreased as the number of GCPs increased, and there was almost no difference when 12 and 14 GCPs were used. The standard deviation was also the smallest when using 12 and 14 GCPs similarly to 3D point clouds. Further, RMSE was approximately 0.04 m from 12 GCPs.
In both MS and LS, there was a small difference from the vertical errors of the corresponding 3D point clouds. In summary, in the case of DSM, at least 12 GCPs must be secured to ensure the accuracy of the result in a situation where vertical errors are considered.
4.5. Comprehensive Discussion
For each study site, the number of GCPs to be used to derive highly accurate horizontal, vertical, and total accuracy was different (
Table 7). In this table, “minimum” represents the minimum number of GCPs to achieve the accuracy of approximately 0.1 m, which is “excellent” accuracy. Whereas, “optimal” is the number of GCPs required to meet the accuracy of ASPRS. The criteria for vertical and total errors are relative.
This study’s results showed that using only three GCPs could result in the optimal accuracy when considering the horizontal accuracy in a small area. Regarding the vertical and total accuracy in typical drone survey areas, such as SS and MS, 6 GCPs are required for excellent accuracy and 12 GCPs for optimal accuracy. Therefore, installing more than 12 GCPs in an area of approximately 39 ha or less is inefficient.
In the LS, the optimal accuracy was observed from six GCPs when considering the horizontal accuracy. The vertical and total accuracy shown excellent results when at least 12 GCPs were used, and the optimal accuracy was observed using 18 GCPs. In previous studies, the accuracy improved as the number of GCPs increased for very large areas, but the accuracy improvement alongside the increase in the number of GCPs was unknown [
19,
24,
26,
43]. In this study, the degree of improvement was not evident, either.
Thus, in typical areas (such as SS and MS), using 12 GCPs will be able to produce highly accurate 3D point clouds and DSMs. In larger areas, the installation of more than 12 GCPs will be required depending on the needs. These results indicate that using too many GCPs may not be effective compared to the labor and cost [
55,
56], even if the area of the target site is diverse, unlike calculating the optimal number of GCPs per area in previous studies [
26,
29,
41,
43].
In order to find methods that can improve UAV modeling accuracy, research has been conducted on solutions, such as camera angle, altitude, overlap, interior orientation parameters of the camera, and calibration, rather than on exterior orientation parameters, such as GCPs. In addition, the need for GCP installation was significantly reduced through the RTK and PPK techniques [
25,
27,
37]. Therefore, with the development of technology, the dependence on the number of GCPs is expected to decrease gradually. Nevertheless, discussion on the number of GCPs will continue, as the method of using GCPs is the most widely used UAV modeling method and the most accurate method.
There are extremely diverse target sites for UAV modeling, as almost all the surface of the earth can be targeted [
57,
58,
59,
60,
61]. Thus, the elevation and roughness of the ground surface are different. In our study, the three study areas were similar because there was little or no vegetation. However, the main study areas showed variation as follows: (i) Aggregation and bare land (SS), (ii) sand and gravels of beach (MS), and (iii) artificial/man-made areas (LS). In addition, the study on the number of GCPs mentioned in the introduction [
38,
39,
40,
41,
42,
43] also had a difference in elevation of less than 100 m in the study area except for the study of Enoc Sanz-Ablanedo et al. [
43]. Generally, the distance between GCPs is referred to as the plane distance, but if the height difference in the study area is large, the height of the study area should be considered because the slant distance increases in proportion to the height difference. If the characteristics of the ground surface are considered in future studies, this may produce interesting results.
Herein, different UAVs and cameras were used for the three study sites. Various models and cameras were used as research materials because UAVs from hobby-type UAVs to industrial UAVs are routinely considered in UAV modeling. Therefore, it will be possible to apply the results of this study more universally. However, in future research, it will be essential to conduct research by reinforcing variable control and changing only the relative area for the same UAV, camera, and site.
Up to 18 GCPs were used for each site. LS exhibited the smallest RMSE with 18 GCPs. In future research, if the set interval for the number of GCPs is reduced to less than 3 and 18 GCPs or more are used, the results can be used to reinforce the results of this study.
5. Conclusions
In this study, the accuracy of 3D point clouds and DSMs were analyzed in three study sites with different areas according to the number of GCPs to propose the optimal number of GCPs for the 3D UAV modeling of various areas.
When the horizontal accuracy was considered, three or more GCPs had to be used in the SS, while six or more GCPs had to be used in the MS and LS. In terms of the vertical accuracy, using only 12 GCPs reached the optimal accuracy in SS and MS, and 18 GCPs in the LS. When considering the total accuracy that covers both the horizontal and vertical accuracy, using only 12 GCPs exhibited the optimal accuracy in SS and MS, and again 18 GCPs in the LS as with the vertical accuracy.
When 3D point clouds, DSMs, and orthomosaics are produced using UAVS, the installation of GCPs requires a lot of time and labor, both indoors and outdoors. Most of the previous studies discussed the number of GCPs in only one study area. On the other hand, our study selected various UAV modelling sites (encompassing natural environment, large industrial complexes, and environmental monitoring areas) based on different areas. We expect that if the results of this study are applied to actual UAV modeling, it may be possible to reduce the time and labor required for GCP installation.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}