High Resolution Geospatial Evapotranspiration Mapping of Irrigated Field Crops Using Multispectral and Thermal Infrared Imagery with METRIC Energy Balance Model

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Field Sites
2.2. Data Acquisition Campaigns
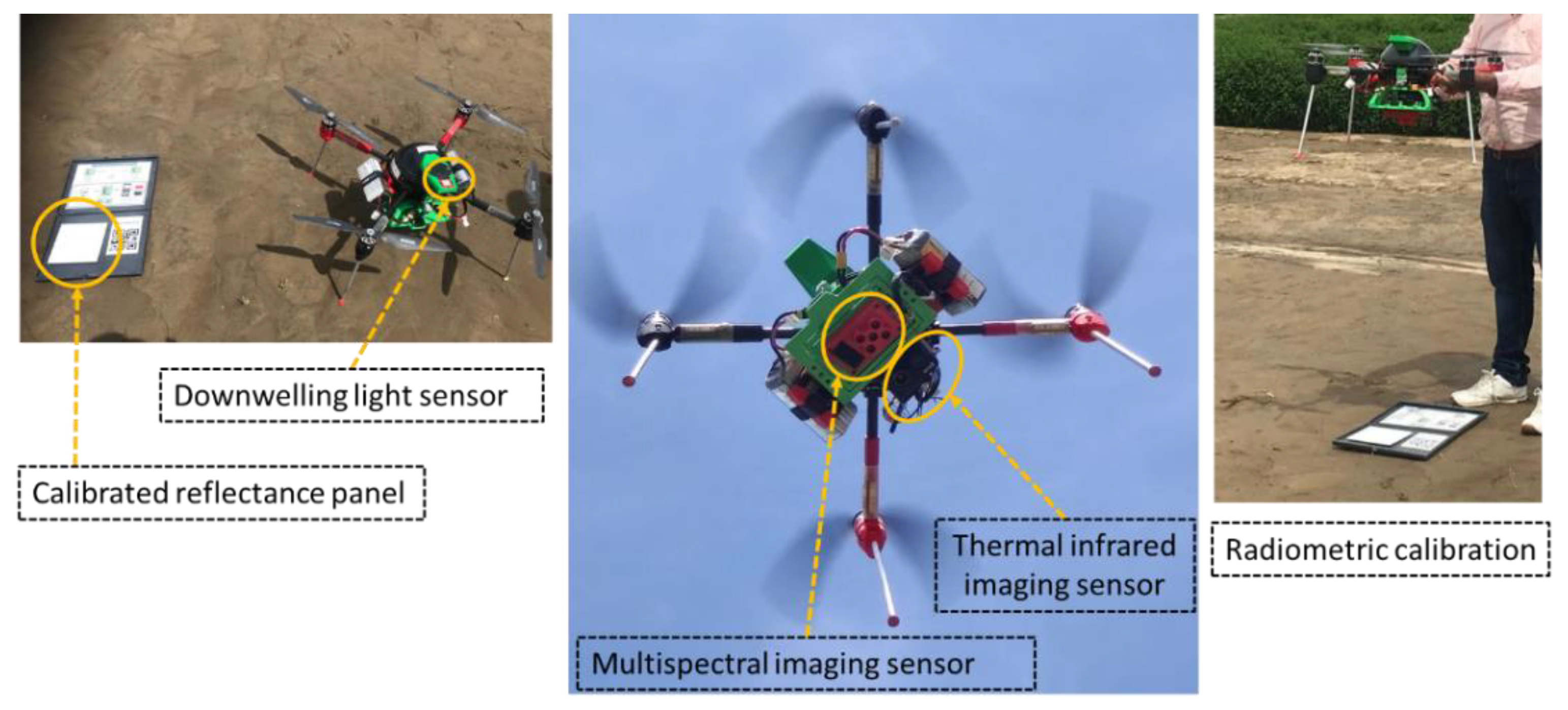
2.2.1. UAS-Based Imagery
2.2.2. Satellite-Based Imagery and Weather Data
2.3. Imagery Analysis and METRIC Models Implementation
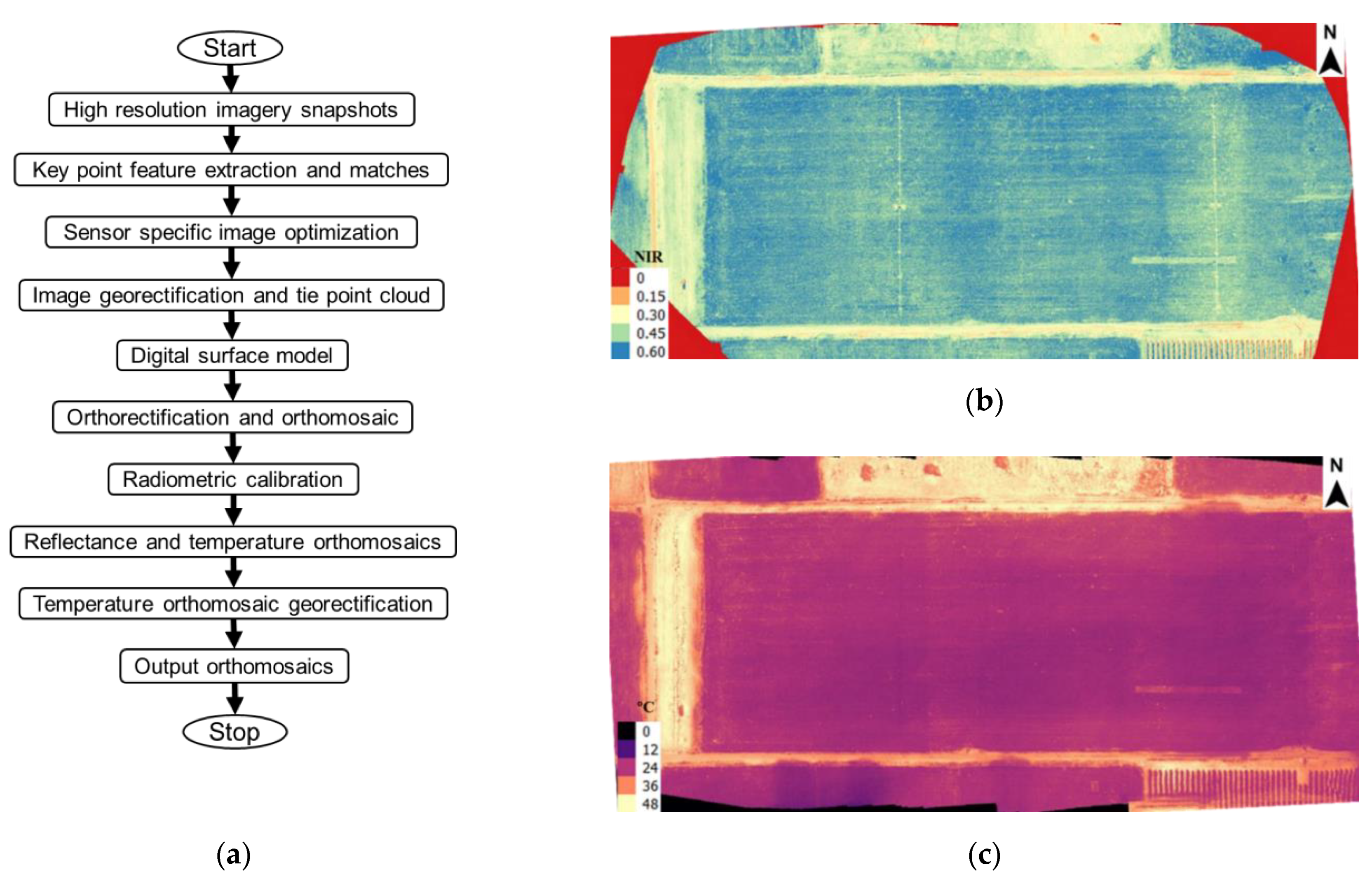
2.3.1. Preprocessing
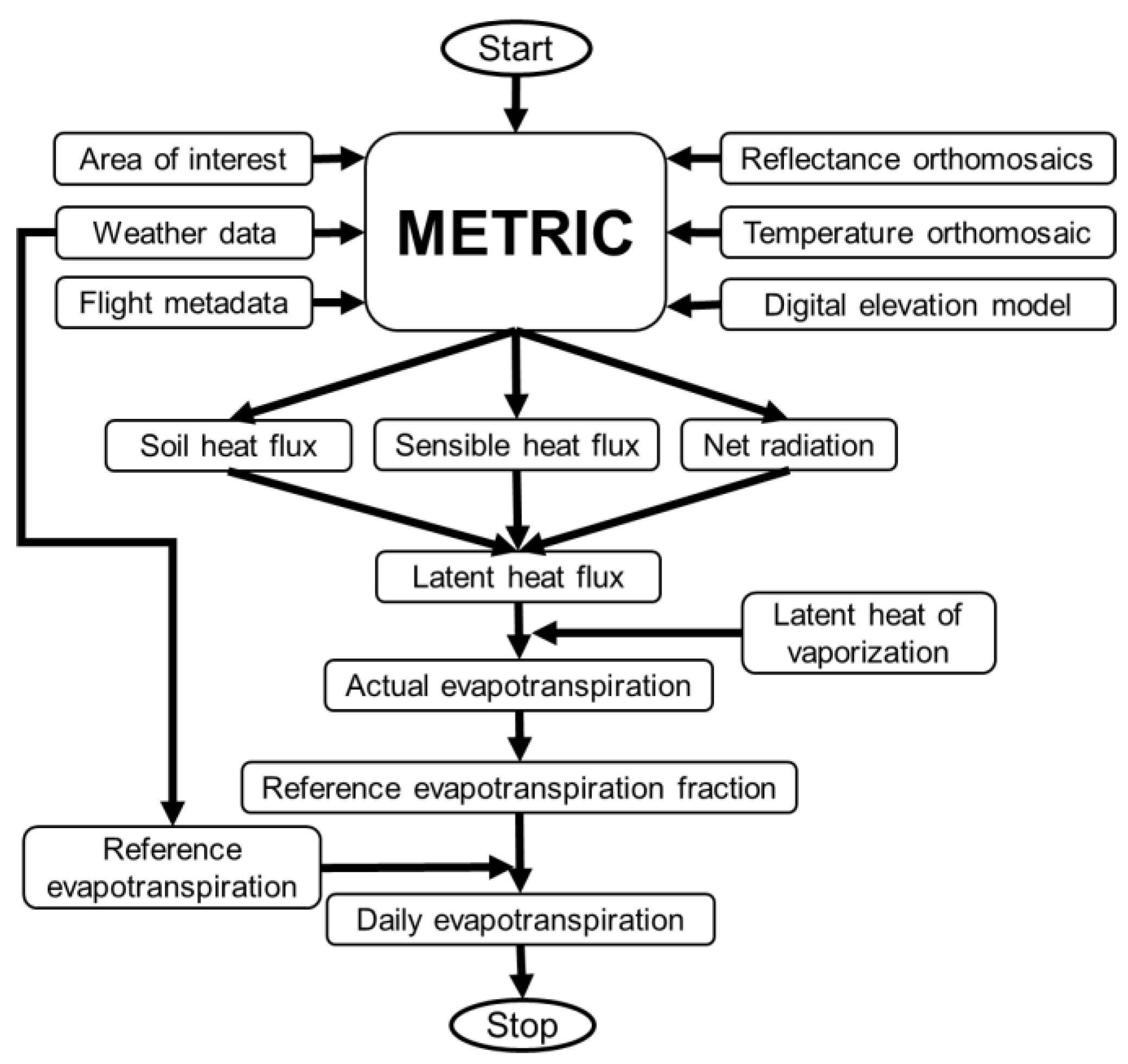
2.3.2. METRIC Model Implementation
2.4. Output Comparisons
3. Results
3.1. Crop Vigor
3.2. Net Radiation, Soil Heat and Sensible Heat Fluxes
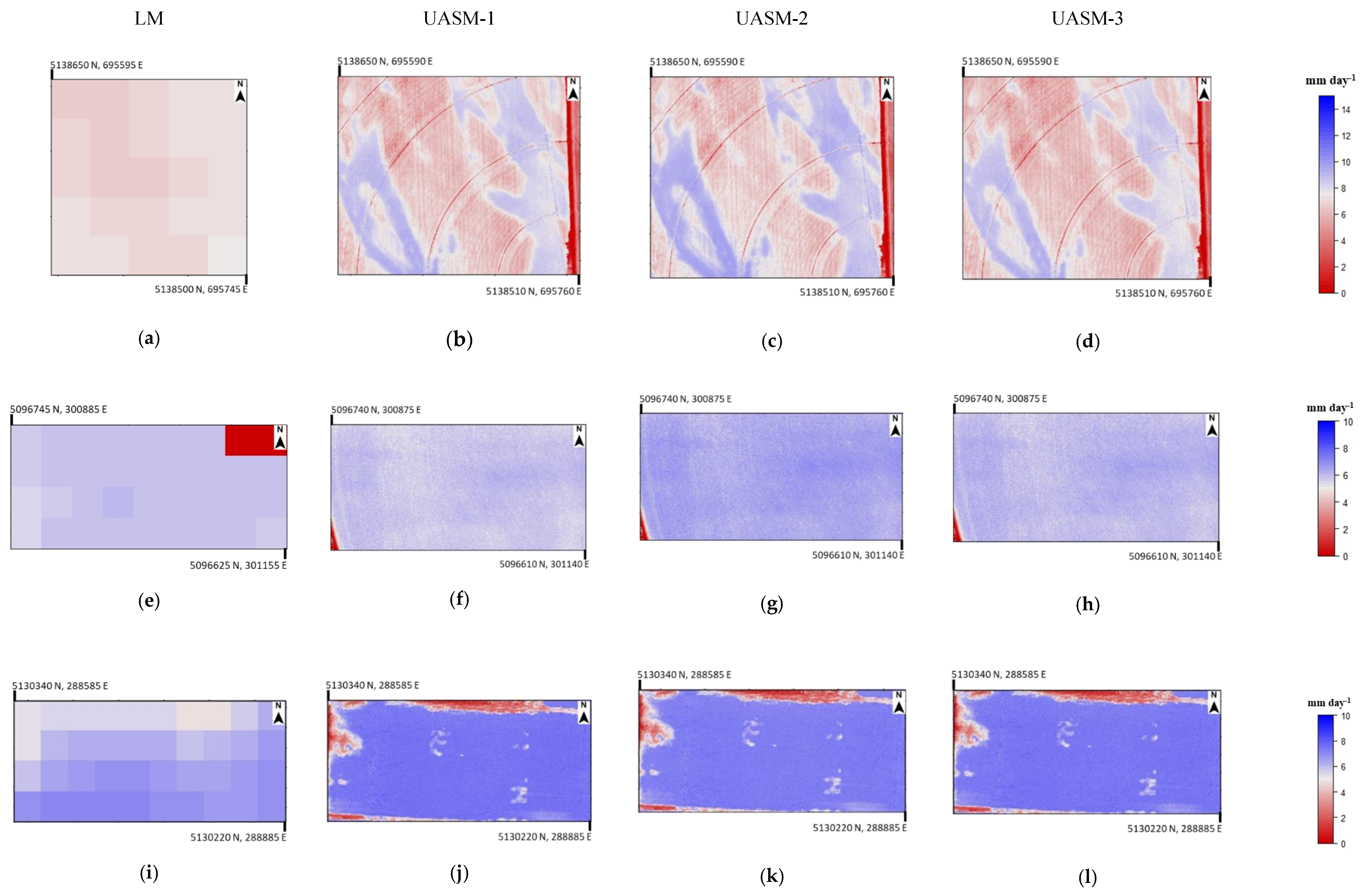
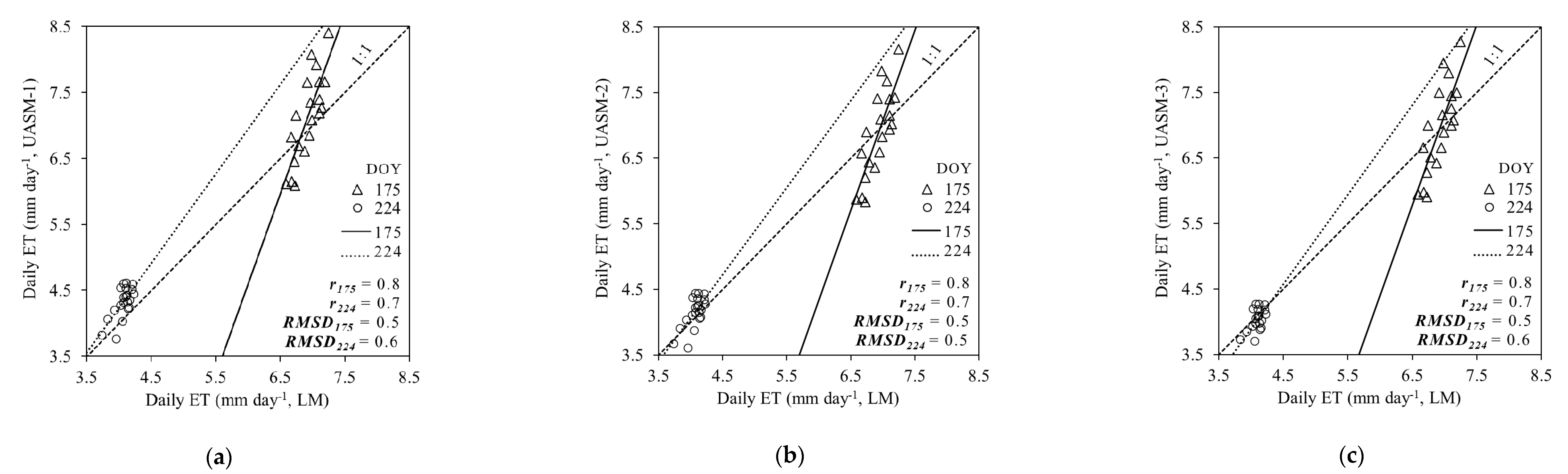
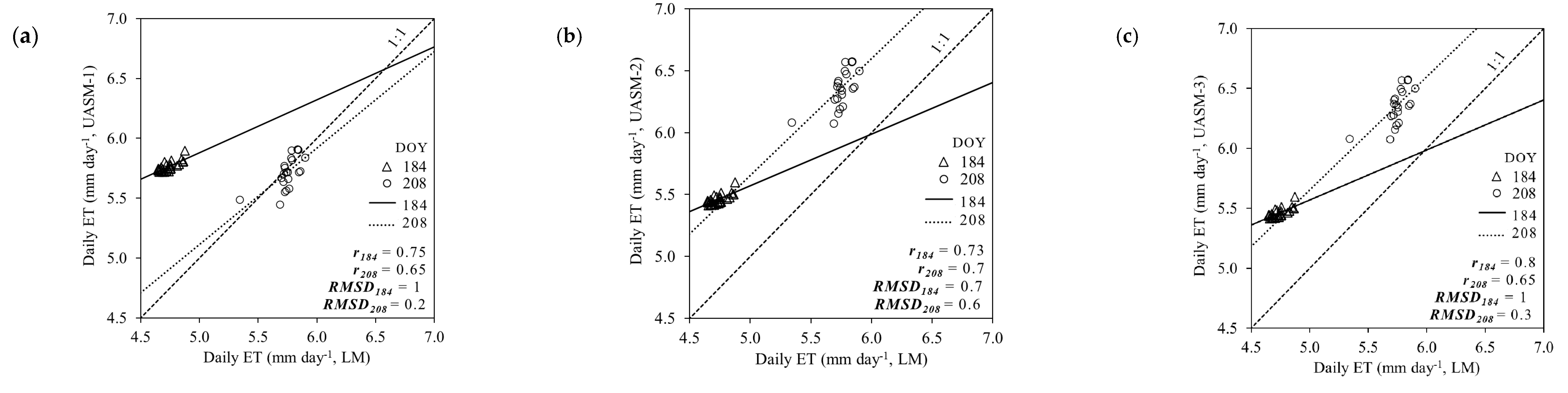
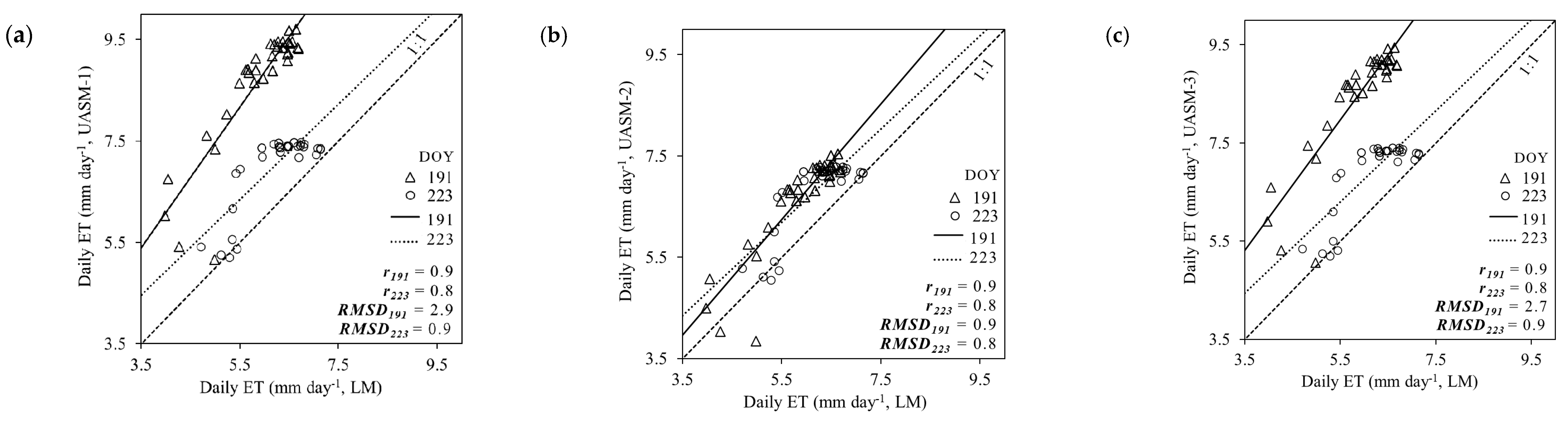
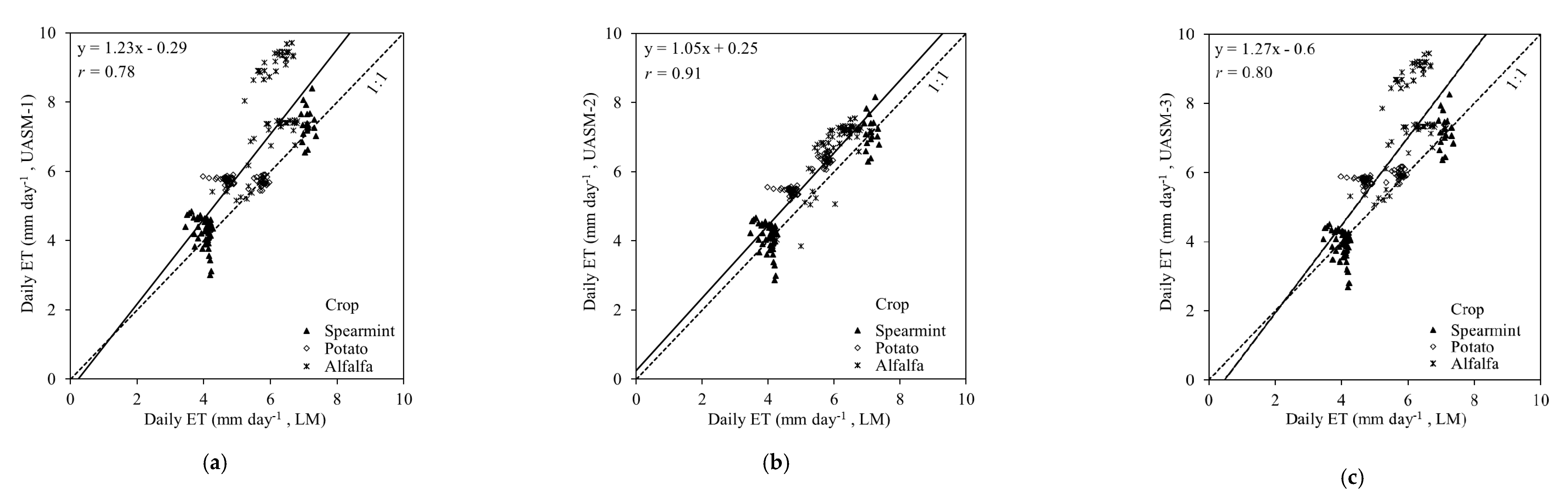
3.3. Daily Evapotranspiration
4. Discussion
4.1. Crop Vigor
4.2. Net Radiation and Soil Heat Flux
4.3. Sensible Heat Flux
4.4. Daily Evapotranspiration
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kustas, W.P.; Norman, J.M. Use of remote sensing for evapotranspiration monitoring over land surfaces. Hydrol. Sci. J. 1996, 41, 495–516. [Google Scholar] [CrossRef]
- Quattrochi, D.A.; Luvall, F.J.C. Thermal infrared remote sensing for analysis of landscape ecological processes: Methods and applications. Landsc. Ecol. 1999, 14, 577–598. [Google Scholar] [CrossRef]
- Overgaard, J.; Rosbjerg, D.; Butts, M.B. Land-surface modelling in hydrological perspective? a review. Biogeosciences 2006, 3, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, M.; King, E.A.; McVicar, T.R. A user-customized Web-based delivery system of hypertemporal remote sensing datasets for Australasia. Photogramm. Eng. Rem. Sens. 2006, 72, 1073–1080. [Google Scholar] [CrossRef]
- Farahani, H.; Howell, T.; Shuttleworth, W.; Bausch, W.C. Evapotranspiration: Progress in measurement and modeling in agriculture. Trans. Am. Soc. Agric. Biol. Eng. 2007, 50, 1627–1638. [Google Scholar] [CrossRef]
- Glenn, E.P.; Huete, A.R.; Nagler, P.L.; Hirschboeck, K.K.; Brown, P. Integrating remote sensing and ground methods to estimate evapotranspiration. Crit. Rev. Plant Sci. 2007, 26, 139–168. [Google Scholar] [CrossRef]
- Gowda, P.H.; Chavez, J.L.; Colaizzi, P.D.; Evett, S.R.; Howell, T.A.; Tolk, J.A. Remote sensing based energy balance algorithms for mapping ET: Current status and future challenges. Trans. Am. Soc. Agric. Biol. Eng. 2007, 50, 1639–1644. [Google Scholar]
- Verstraeten, W.W.; Veroustraete, F.; Feyen, J. Assessment of evapotranspiration and soil moisture content across different scales of observation. Sensors 2008, 8, 70–117. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.G.; Tasumi, M.; Trezza, R. Satellite-based energy balance for mapping evapotranspiration with internalized calibration (METRIC)-Model. J. Irrig. Drain. Eng. 2007, 133, 380–394. [Google Scholar] [CrossRef]
- Allen, R.G.; Tasumi, M.; Morse, A.; Trezza, R.; Wright, J.L.; Bastiaanssen, W.; Kramber, W.; Lorite, I.J.; Robison, C.W. Satellite-based energy balance for mapping evapotranspiration with internalized calibration (METRIC)—Applications. J. Irrig. Drain. Eng. 2007, 133, 395–406. [Google Scholar] [CrossRef]
- Trezza, R. Evapotranspiration Using a Satellite-Based Surface Energy Balance with Standardized Ground Control. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2002. [Google Scholar]
- Tasumi, M.; Allen, R.G.; Trezza, R.; Wright, J.L. Satellite-based energy balance to assess within-population variance crop coefficient curves. J. Irrig. Drain. Eng. 2005, 131, 94–139. [Google Scholar] [CrossRef]
- Gonzalez-Dugo, M.P.; Neale, C.M.U.; Mateos, L.; Kustas, W.P.; Prueger, J.H.; Anderson, M.C.; Li, F. A comparison of operational remote sensing-based models for estimating crop evapotranspiration. Agric. For. Meteorol. 2009, 149, 1843–1853. [Google Scholar] [CrossRef]
- Chávez, J.L.; Howell, T.A.; Gowda, P.H.; Copeland, K.S.; Prueger, J.H. Surface aerodynamic temperature modeling over rainfed cotton. Trans. Am. Soc. Agric. Biol. Eng. 2010, 53, 759–767. [Google Scholar]
- Allen, R.; Irmak, A.; Trezza, R.; Hendrickx, J.M.; Bastiaanssen, W.; Kjaersgaard, J. Satellite-based ET estimation in agriculture using SEBAL and METRIC. Hydrol. Process. 2011, 25, 4011–4027. [Google Scholar] [CrossRef]
- Anderson, M.C.; Allen, R.G.; Morse, A.; Kustas, W.P. Use of Landsat thermal imagery in monitoring evapotranspiration and managing water resources. Remote Sens. Environ. 2012, 122, 50–65. [Google Scholar] [CrossRef]
- Santos, C.; Lorite, I.J.; Allen, R.G.; Tasumi, M. Aerodynamic Parameterization of the Satellite-Based Energy Balance (METRIC) Model for ET Estimation in Rainfed Olive Orchards of Andalusia, Spain. Water Resour. Manag. 2012, 26, 3267–3283. [Google Scholar] [CrossRef]
- Paço, T.A.; Pôças, I.; Cunha, M.; Silvestre, J.C.; Santos, F.L.; Paredes, P.; Pereira, L.S. Evapotranspiration and crop coefficients for a super intensive olive orchard. An application of SIMDualKc and METRIC models using ground and satellite observations. J. Hydrol. 2014, 519, 2067–2080. [Google Scholar] [CrossRef] [Green Version]
- Pôças, I.; Paço, T.A.; Cunha, M.; Andrade, J.A.; Silvestre, J.; Sousa, A.; Santos, F.L.; Pereira, L.S.; Allen, R.G. Satellite-based evapotranspiration of a super-intensive olive orchard: Application of METRIC algorithms. Biosyst. Eng. 2014, 128, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Carrasco-Benavides, M.; Ortega-Farías, S.; Lagos, L.; Kleissl, J.; Morales-Salinas, L.; Kilic, A. Parameterization of the satellite-based model (METRIC) for the estimation of instantaneous surface energy balance components over a drip-irrigated vineyard. Remote Sens. 2014, 6, 11342–11371. [Google Scholar] [CrossRef] [Green Version]
- la Fuente-Sáiz, D.; Ortega-Farías, S.; Fonseca, D.; Ortega-Salazar, S.; Kilic, A.; Allen, R. Calibration of metric model to estimate energy balance over a drip-irrigated apple orchard. Remote Sens. 2017, 9, 670. [Google Scholar] [CrossRef] [Green Version]
- McShane, R.R.; Driscoll, K.P.; Sando, R. A Review of Surface Energy Balance Models for Estimating Actual Evapotranspiration with Remote Sensing at High Spatiotemporal Resolution over Large Extents; Scientific Investigations Report; Department of the Interior and U.S. Geological Survey: Reston, VA, USA, 2017.
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Vargas, J.J.Q.; Khot, L.R.; Peters, R.T.; Chandel, A.K.; Molaei, B. Low Orbiting Satellite and Small UAS-Based High-Resolution Imagery Data to Quantify Crop Lodging: A Case Study in Irrigated Spearmint. IEEE Geosci. Remote Sens. 2019, 17, 755–759. [Google Scholar] [CrossRef]
- Ranjan, R.; Chandel, A.K.; Khot, L.R.; Bahlol, H.Y.; Zhou, J.; Boydston, R.A.; Miklas, P.N. Irrigated pinto bean crop stress and yield assessment using ground based low altitude remote sensing technology. Inf. Process. Agric. 2019, 6, 502–514. [Google Scholar] [CrossRef]
- Berni, J.A.; Zarco-Tejada, P.J.; Suárez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef] [Green Version]
- Chávez, J.L.; Gowda, P.H.; Howell, T.A.; Garcia, L.A.; Copeland, K.S.; Neale, C.M.U. ET mapping with high-resolution airborne remote sensing data in an advective semiarid environment. J. Irrig. Drain. Eng. 2012, 138, 416–423. [Google Scholar] [CrossRef]
- Elarab, M. The Application of Unmanned Aerial Vehicle to Precision Agriculture: Chlorophyll, Nitrogen, and Evapotranspiration Estimation. Ph.D. Thesis, Utah State University, Logan, UT, USA, 2016. [Google Scholar]
- Chávez, J.L.; Torres-Rua, A.; Boldt, W.E.; Zhang, H.; Robertson, C.; Marek, G.; Wang, D.; Heeren, D.; Taghvaeian, S.; Neale, C.M. A Decade of Unmanned Aerial Systems in Irrigated Agriculture in the Western US. Appl. Eng. Agric. 2020, 36, 423–436. [Google Scholar] [CrossRef]
- Sankaran, S.; Khot, L.R.; Espinoza, C.Z.; Jarolmasjed, S.; Sathuvalli, V.R.; Vandemark, G.J.; Miklas, P.N.; Carter, A.H.; Pumphrey, M.O.; Knowles, N.R.; et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: A review. Eur. J. Agron. 2015, 70, 112–123. [Google Scholar] [CrossRef]
- Ortega-Farías, S.; Ortega-Salazar, S.; Poblete, T.; Kilic, A.; Allen, R.; Poblete-Echeverría, C.; Ahumada-Orellana, L.; Zuñiga, M.; Sepúlveda, D. Estimation of energy balance components over a drip-irrigated olive orchard using thermal and multispectral cameras placed on a helicopter-based unmanned aerial vehicle (UAV). Remote Sens. 2016, 8, 638. [Google Scholar] [CrossRef] [Green Version]
- Brenner, C.; Thiem, C.E.; Wizemann, H.D.; Bernhardt, M.; Schulz, K. Estimating spatially distributed turbulent heat fluxes from high-resolution thermal imagery acquired with a UAV system. Int. J. Remote Sens. 2017, 38, 3003–3026. [Google Scholar] [CrossRef] [Green Version]
- Paul, G. Evaluation of Surface Energy Balance Models for Mapping Evapotranspiration Using very High Resolution Airborne Remote Sensing Data. Ph.D. Thesis, Kansas State University, Manhattan, KS, USA, 2013. [Google Scholar]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating Multispectral Images and Vegetation Indices for Precision Farming Applications from UAV Images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Jorge, J.; Vallbe, M.; Soler, J.A. Detection of irrigation in homogeneities in an olive grove using the NDRE vegetation index obtained from UAV images. Eur. J. Remote Sens. 2019, 52, 169–177. [Google Scholar] [CrossRef] [Green Version]
- Duchemin, B.; Hadria, R.; Erraki, S.; Boulet, G.; Maisongrande, P.; Chehbouni, A.; Escadafal, R.; Ezzahar, J.; Hoedjes, J.C.B.; Kharrou, M.H.; et al. Monitoring wheat phenology and irrigation in Central Morocco: On the use of relationships between evapotranspiration, crops coefficients, leaf area index and remotely-sensed vegetation indices. Agric. Water Manag. 2006, 79, 1–27. [Google Scholar] [CrossRef]
- Smith, A.M.; Bourgeois, G.; Teillet, P.M.; Freemantle, J.; Nadeau, C. A comparison of NDVI and MTVI2 for estimating LAI using CHRIS imagery: A case study in wheat. Can. J. Remote Sens. 2008, 34, 539–548. [Google Scholar] [CrossRef]
- Sun, Z.; Gebremichael, M.; Wang, Q.; Wang, J.; Sammis, T.; Nickless, A. Evaluation of clear-sky incoming radiation estimating equations typically used in remote sensing evapotranspiration algorithms. Remote Sens. 2013, 5, 4735–4752. [Google Scholar] [CrossRef] [Green Version]
- Stettz, S.; Zaitchik, B.F.; Ademe, D.; Musie, S.; Simane, B. Estimating variability in downwelling surface shortwave radiation in a tropical highland environment. PLoS ONE 2019, 14, e0211220. [Google Scholar] [CrossRef]
- Prata, A.J. A new long-wave formula for estimating downward clear-sky radiation at the surface. Q. J. R. Meteorol. Soc. 1996, 122, 1127–1151. [Google Scholar] [CrossRef]
- Olmedo, G.F.; Ortega-Farías, S.; de la Fuente-Sáiz, D.; Fonseca-Luego, D.; Fuentes-Peñailillo, F. Water: Tools and Functions to Estimate Actual Evapotranspiration Using Land Surface Energy Balance Models in R. R. J. 2016, 8, 352–369. [Google Scholar] [CrossRef] [Green Version]
- Jaafar, H.H.; Ahmad, F.A. Time series trends of Landsat-based ET using automated calibration in METRIC and SEBAL: The Bekaa Valley, Lebanon. Remote Sens. Environ. 2020, 238, 111034. [Google Scholar] [CrossRef]
- Huete, A. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Jackson, R.; Hatfield, J.; Reginato, R.; Idso, S.; Pinter, P. Estimation of daily evapotranspiration from one time-of-day measurements. Agric. Water. Manag. 1983, 7, 351–362. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Site 1 | Site 2 | Site 3 |
|---|---|---|---|
| Crop | Spearmint | Potato | Alfalfa |
| Location, WA | Toppenish (46°22′19.16″ N, 120°27′21.91″ W) | Paterson (45°59′43.52″ N, 119°33′57.58″ W) | Prosser (46°17′35.16″ N, 119°44′38.82″ W) |
| Irrigation system | Center pivot | Center pivot | Wheel-line |
| Study plot size (m × m) | 175 × 135 | 275 × 170 | 300 × 140 |
| Mean wind speed (m s−1) | 1.8 | 2.1 | 2.6 |
| Mean relative humidity (%) | 46.9 | 55.5 | 52.9 |
| Total precipitation (mm) | 25 | 53 | 57.2 |
| Mean air temperature (°C) | 20.1 | 18.2 | 18 |
| Cumulative seasonal reference ET (alfalfa-based, mm) | 1042 | 1153 | 1216 |
| Dataset | DOY | DBH | Crop | UAS Imagery | Landsat 7/8 Imagery | Weather & Scene Metadata |
|---|---|---|---|---|---|---|
| 1 | 175 | 10 | Spearmint | √ | √ | √ |
| 2 | 224 | 37 | Spearmint | √ | √ | √ |
| 3 | 184 | 72 | Potato | √ | √ | √ |
| 4 | 208 | 48 | Potato | √ | √ | √ |
| 5 | 191 | 2 | Alfalfa | √ | √ | √ |
| 6 | 223 | 7 | Alfalfa | √ | √ | √ |
| Parameter | LM | UASM-1 | UASM-2 | UASM-3 |
|---|---|---|---|---|
| Metadata | Landsat 7/8 based | UAS flight based | ||
| Surface albedo | Landsat 7/8 imager based | UAS imager based | ||
| Digital elevation model (DEM) | SRTM grids | Derived corresponding to small UAS-based imagery | ||
| Considers variable elevation, slope and aspect per pixel | Considers constant elevation by forcing slope and aspects to zero | |||
| Leaf area index (LAI) | LAI = −(ln[(0.69−SAVI)/0.59])/0.91 SAVI = ((1 + L) ×(RNIR−RR))/(L + (RNIR+RR)), L = 0.1 | LAI = (−ln(1−FCC))/K FCC = (NDVI−NDVImin)/(NDVImax−NDVImin) FCC = 0 for NDVI < 0.3 | ||
| Incoming shortwave radiation (ISWR) | Rs↓ = Gsc × cosθrel × τsw/d2 | Measured directly from the nearest open field weather station. | ||
| cosθrel calculated for non-horizontal surface using surface slopes and aspect. | cosθrel calculated for horizontal surface by forcing surface slope and aspect to zero. | |||
| Incoming longwave radiation (ILWR) | RL↓ = εaσTs4 | RL↓ = εaσTa4 | ||
| Momentum roughness length (MRL) | Zom = 0.018 × LAI | |||
| Zom,mtn = Zom × (1 + (((180×S)⁄π)−5)/20) | No adjustment | |||
| Approach | LM | UASM-1 | UASM-2 | UASM-3 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameter (Unit) | Mean | SD | Mean | SD | Mean | SD | Mean | SD | ||||||||
| DBH | 10 | 37 | 10 | 37 | 10 | 37 | 10 | 37 | 10 | 37 | 10 | 37 | 10 | 37 | 10 | 37 |
| SAVI | 0.8 | 0.9 | 0.03 | 0.01 | 0.8 * | 0.8 * | 0.1 * | 0.1 * | 0.8 * | 0.8 * | 0.1 * | 0.1 * | 0.8 * | 0.8 * | 0.1 * | 0.1 * |
| NDVI | 0.9 | 0.9 | 0.02 | 0.02 | 0.9 * | 0.9 * | 0.1 * | 0.1 * | 0.9 * | 0.9 * | 0.1 * | 0.1 * | 0.9 * | 0.9 * | 0.1 * | 0.1 * |
| FCC | - | - | - | - | - | - | - | - | - | - | - | - | 0.9 | 0.9 | 0.2 | 0.1 |
| LAI (m2 m−2) | 5.8 | 6.0 | 0.3 | 0.1 | 5.5 * | 5.7 * | 1.2 * | 1.0 * | 5.5 * | 5.7 * | 1.2 * | 1.0 * | 5.5 | 5.9 | 1.6 | 0.9 |
| MRL (m) | 0.1 | 0.1 | 0.004 | 0.001 | 0.1 | 0.1 | 0.02 | 0.02 | 0.1 | 0.1 | 0.02 | 0.02 | 0.1 | 0.1 | 0.03 | 0.02 |
| ISWR (W m−2) | 903 | 820 | 0.02 | 0.01 | 899 | 817 | 6.1 | 8.3 | 901 | 820 | 0.01 | 0.01 | 934 | 737 | - | - |
| ILWR (W m−2) | 396 | 352 | 4.4 | 3.8 | 347 * | 296 * | 24.2 * | 11.0 * | 347 * | 296 * | 24 * | 11.0 * | 349 | 334 | - | - |
| OLWR (W m−2) | 515 | 455 | 5.7 | 4.9 | 451 * | 382 * | 29.7 * | 13.2 * | 451 * | 382 * | 29.7 * | 13.2 * | 451 | 381 | 29.7 | 13.5 |
| Net radiation (Rn, W m−2) | 594 | 508 | 17.3 | 11.3 | 677 * | 596 * | 16.3 * | 17.7 * | 677 * | 596 * | 16.3 * | 17.7 * | 707 | 564 | 29.2 | 22.3 |
| Soil heat flux (G, W m−2) | 48.3 | 23.8 | 8 | 3.6 | 35 * | 19.4 * | 22 * | 8.4 * | 35.2 * | 19.4 * | 22 * | 8.4 * | 36 | 18.2 | 20.2 | 7.2 |
| Sensible heat flux (H, W m−2) | 106 | 168 | 13.5 | 12 | 188 | 237 | 87 | 41 | 165 | 250 | 87 | 39 | 194 | 234 | 80 | 29.5 |
| ETinst (mm h−1) | 0.66 | 0.47 | 0.04 | 0.02 | 0.67 | 0.50 | 0.15 | 0.08 | 0.65 | 0.48 | 0.15 | 0.08 | 0.65 | 0.46 | 0.15 | 0.08 |
| ETrF | 0.73 | 0.78 | 0.05 | 0.04 | 0.74 | 0.83 | 0.16 | 0.13 | 0.71 | 0.79 | 0.16 | 0.13 | 0.72 | 0.76 | 0.16 | 0.13 |
| ETr24 (mm day−1) | 9.43 * | 5.2 * | 0 | 0 | 9.43 * | 5.16 * | 0 | 0 | 9.43 * | 5.16 * | 0 | 0 | 9.43 * | 5.16 * | 0 | 0 |
| Daily ET (mm day−1) | 6.99 | 4.01 | 0.22 | 0.20 | 6.96 | 4.26 | 1.53 | 0.67 | 6.72 | 4.09 | 1.5 | 0.65 | 6.79 | 3.92 | 1.53 | 0.65 |
| ETdep,abs (%) | - | - | - | 0.43 | 6.23 | - | - | 3.86 | 2.00 | - | - | 2.86 | 2.24 | - | - | |
| Approach | LM | UASM-1 | UASM-2 | UASM-3 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameter (Unit) | Mean | SD | Mean | SD | Mean | SD | Mean | SD | ||||||||
| DBH | 72 | 48 | 72 | 48 | 72 | 48 | 72 | 48 | 72 | 48 | 72 | 48 | 72 | 48 | 72 | 48 |
| SAVI | 0.86 | 0.82 | 0.02 | 0.03 | 0.85 * | 0.85 * | 0.09 * | 0.07 * | 0.85 * | 0.85 * | 0.09 * | 0.07 * | 0.85 * | 0.85 * | 0.09 * | 0.07 * |
| NDVI | 0.90 | 0.85 | 0.02 | 0.02 | 0.90 * | 0.88 * | 0.09 * | 0.06 * | 0.90 * | 0.88 * | 0.09 * | 0.06 * | 0.90 * | 0.88 * | 0.09 * | 0.06 * |
| FCC | - | - | - | - | - | - | - | - | - | - | - | - | 0.93 | 0.92 | 0.12 | 0.08 |
| LAI (m2 m−2) | 6 | 4.02 | 0 | 0.46 | 5.83 * | 5.82 * | 0.85 * | 0.70 * | 5.83 * | 5.82 * | 0.85 * | 0.70 * | 5.52 | 5.11 | 0.71 | 0.62 |
| MRL (m) | 0.08 | 0.04 | 0 | 0.006 | 0.09 | 0.09 | 0.01 | 0.01 | 0.11 | 0.1 | 0.02 | 0.01 | 0.1 | 0.09 | 0.01 | 0.01 |
| ISWR (W m−2) | 903.5 | 854.9 | 0.01 | 0.01 | 927.1 | 873.4 | 7.35 | 9.95 | 921.3 | 865.6 | 0.003 | 0.003 | 949 | 889 | - | - |
| ILWR (W m−2) | 337.2 | 370.3 | 4.38 | 3.68 | 314.3 * | 335.8 * | 4.14 * | 9.99 * | 314.3 * | 335.8 * | 4.14 * | 9.99 * | 321.3 | 375.4 | - | - |
| OLWR (W m−2) | 439.6 | 478.5 | 5.71 | 4.02 | 409.9 * | 434.7 * | 4.11 * | 12.04 * | 409.9 * | 434.7 * | 4.11 * | 12 * | 409.8 | 434.6 | 4.05 | 12 |
| Net radiation (Rn, W m−2) | 565.5 | 546.6 | 9.22 | 6.68 | 685.2 * | 617 * | 15.0 * | 18.42 * | 685.2 * | 617 * | 15.0 * | 18.4 * | 715.8 | 675.3 | 17.4 | 20.5 |
| Soil heat flux (G, W m−2) | 29 | 46.9 | 3.94 | 5.50 | 22.5 * | 29.9 * | 9.53 * | 10.97 * | 22.5 * | 29.9 * | 9.53 * | 11 * | 23.5 | 32.6 | 9.50 | 10.8 |
| Sensible heat flux (H, W m−2) | 133 | 91.8 | 13.4 | 6.35 | 175.3 | 180.5 | 71.7 | 17.78 | 201.1 | 134.8 | 67.6 | 20.5 | 202.5 | 218.7 | 67.5 | 12.4 |
| ETinst (mm h−1) | 0.59 | 0.61 | 0.02 | 0.01 | 0.71 | 0.60 | 0.13 | 0.04 | 0.68 | 0.67 | 0.12 | 0.05 | 0.72 | 0.62 | 0.13 | 0.05 |
| ETrF | 0.75 | 0.89 | 0.03 | 0.02 | 0.91 | 0.88 | 0.10 | 0.06 | 0.86 | 0.98 | 0.10 | 0.07 | 0.91 | 0.92 | 0.10 | 0.07 |
| ETr24 (mm day−1) | 6.27 * | 6.47 * | 0 | 0 | 6.27 * | 6.47 * | 0 | 0 | 6.27 * | 6.47 * | 0 | 0 | 6.27 * | 6.47 * | 0 | 0 |
| Daily ET (mm day−1) | 4.71 | 5.76 | 0.17 | 0.12 | 5.69 | 5.71 | 0.63 | 0.42 | 5.39 | 6.35 | 0.60 | 0.45 | 5.71 | 5.95 | 0.63 | 0.44 |
| ETdep,abs (%) | - | - | - | - | 20.8 | 0.87 | - | - | 14.4 | 10.2 | - | - | 21.2 | 3.30 | - | - |
| Approach | LM | UASM-1 | UASM -2 | UASM-3 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Parameter (Unit) | Mean | SD | Mean | SD | Mean | SD | Mean | SD | ||||||||
| DBH | 2 | 7 | 2 | 7 | 2 | 7 | 2 | 7 | 2 | 7 | 2 | 7 | 2 | 7 | 2 | 7 |
| SAVI | 0.83 | 0.68 | 0.01 | 0.19 | 0.85 * | 0.73 * | 0.07 * | 0.20 * | 0.85 * | 0.73 * | 0.07 * | 0.20 * | 0.85 * | 0.73 * | 0.07 * | 0.20 * |
| NDVI | 0.83 | 0.83 | 0.11 | 0.08 | 0.82 * | 0.81 * | 0.17 * | 0.22 * | 0.82 * | 0.81 * | 0.17 * | 0.22 * | 0.82 * | 0.81 * | 0.17 * | 0.22 * |
| FCC | - | - | - | - | - | - | - | - | - | - | - | - | 0.92 | 0.80 | 0.08 | 0.24 |
| LAI (m2 m−2) | 5.31 | 4.74 | 0.68 | 1.24 | 5.25 * | 5.05 * | 1.53 * | 0.98 * | 5.25 * | 5.05 * | 1.53 * | 0.98 * | 5.05 | 3.54 | 0.96 | 1.18 |
| MRL (m) | 0.07 | 0.06 | 0.02 | 0.02 | 0.08 | 0.08 | 0.01 | 0.02 | 0.09 | 0.09 | 0.01 | 0.02 | 0.09 | 0.04 | 0.02 | 0.01 |
| ISWR (W m−2) | 886.1 | 822.9 | 0.02 | 0.02 | 902.3 | 840.4 | 9.19 | 9.90 | 889.2 | 821.3 | 0.003 | 0.003 | 872 | 804.5 | - | - |
| ILWR (W m−2) | 367.2 | 367 | 7.00 | 6.89 | 324.1 * | 312.2 * | 27.8 * | 20.7 * | 324.1 * | 312.2 * | 27.8 * | 20.7 * | 331.9 | 346.7 | - | - |
| OLWR (W m−2) | 475.1 | 477.6 | 8.58 | 8.34 | 419.2 * | 401.9 * | 32.5 * | 23.2 * | 419.2 * | 401.9 * | 32.5 * | 23.2 * | 419.5 | 401.8 | 32.5 | 23.1 |
| Net radiation (Rn, W m−2) | 592.5 | 534.7 | 9.03 | 5.73 | 661.4 * | 620.7 * | 28.7 * | 29.1 * | 661.4 * | 620.7 * | 28.7 * | 29.1 * | 654.6 | 639.8 | 53.5 | 46.7 |
| Soil heat flux (G, W m−2) | 63.6 | 44.6 | 15.3 | 15.7 | 35.9 * | 27.6 * | 25.6 * | 21.1 * | 35.9 * | 27.6 * | 25.6 * | 21.1 * | 33.7 | 27.7 | 20.2 | 19 |
| Sensible heat flux (H, W m−2) | 181 | 59.9 | 33.7 | 30.3 | 119.5 | 114.3 | 70 | 51.8 | 238.4 | 126.3 | 47 | 49.8 | 126.9 | 137.5 | 46.2 | 34 |
| ETinst (mm h−1) | 0.53 | 0.64 | 0.07 | 0.06 | 0.74 | 0.70 | 0.18 | 0.14 | 0.57 | 0.68 | 0.14 | 0.14 | 0.72 | 0.69 | 0.17 | 0.14 |
| ETrF | 0.67 | 0.74 | 0.08 | 0.07 | 0.95 | 0.81 | 0.22 | 0.16 | 0.73 | 0.79 | 0.18 | 0.16 | 0.93 | 0.80 | 0.22 | 0.16 |
| ETr24 (mm day−1) | 8.84 * | 8.48 * | 0 | 0 | 8.84 * | 8.48 * | 0 | 0 | 8.84 * | 8.48 * | 0 | 0 | 8.84 * | 8.84 * | 0 | 0 |
| Daily ET (mm day−1) | 5.90 | 6.26 | 0.73 | 0.59 | 8.40 | 6.88 | 1.95 | 1.39 | 6.43 | 6.71 | 1.56 | 1.36 | 8.18 | 6.82 | 1.91 | 1.38 |
| ETdep,abs (%) | - | - | - | - | 42.4 | 9.90 | - | - | 8.98 | 7.19 | - | - | 38.6 | 8.95 | - | - |
| DBH | Approach | Pixel | Spearmint | Potato | Alfalfa | |||
|---|---|---|---|---|---|---|---|---|
| NDVI | Ts | NDVI | Ts | NDVI | Ts | |||
| 10 (Spearmint) 72 (Potato) 2 (Alfalfa) | LM | Hot | 0.21 | 336.15 | 0.28 | 321.07 | 0.19 | 330.26 |
| Cold | 0.87 | 300.86 | 0.82 | 299.34 | 0.86 | 298.66 | ||
| UASM-1 | Hot | 0.27 | 320.43 | 0.26 | 319.18 | 0.25 | 323.54 | |
| Cold | 0.93 | 294.65 | 0.89 | 296.92 | 0.9 | 296.54 | ||
| UASM-2 | Hot | 0.27 | 320.43 | 0.26 | 319.18 | 0.25 | 323.54 | |
| Cold | 0.81 | 295.82 | 0.85 | 295.03 | 0.88 | 294.42 | ||
| UASM-3 | Hot | 0.27 | 320.43 | 0.26 | 319.18 | 0.25 | 323.54 | |
| Cold | 0.87 | 293.2 | 0.87 | 294.55 | 0.85 | 293.43 | ||
| 37 (Spearmint) 48 (Potato) 7 (Alfalfa) | LM | Hot | 0.19 | 333.47 | 0.15 | 326.78 | 0.17 | 331.3 |
| Cold | 0.91 | 301.37 | 0.96 | 306 | 0.86 | 300.52 | ||
| UASM-1 | Hot | 0.24 | 317.94 | 0.27 | 326.85 | 0.21 | 319.11 | |
| Cold | 0.85 | 297.8 | 0.91 | 294.84 | 0.87 | 297.51 | ||
| UASM-2 | Hot | 0.24 | 317.94 | 0.27 | 326.85 | 0.21 | 319.11 | |
| Cold | 0.86 | 298.58 | 0.92 | 294.61 | 0.85 | 296.88 | ||
| UASM-3 | Hot | 0.24 | 317.94 | 0.27 | 326.85 | 0.21 | 319.11 | |
| Cold | 0.88 | 295.57 | 0.89 | 295.96 | 0.89 | 294.98 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chandel, A.K.; Molaei, B.; Khot, L.R.; Peters, R.T.; Stöckle, C.O. High Resolution Geospatial Evapotranspiration Mapping of Irrigated Field Crops Using Multispectral and Thermal Infrared Imagery with METRIC Energy Balance Model. Drones 2020, 4, 52. https://doi.org/10.3390/drones4030052
Chandel AK, Molaei B, Khot LR, Peters RT, Stöckle CO. High Resolution Geospatial Evapotranspiration Mapping of Irrigated Field Crops Using Multispectral and Thermal Infrared Imagery with METRIC Energy Balance Model. Drones. 2020; 4(3):52. https://doi.org/10.3390/drones4030052
Chicago/Turabian StyleChandel, Abhilash K., Behnaz Molaei, Lav R. Khot, R. Troy Peters, and Claudio O. Stöckle. 2020. "High Resolution Geospatial Evapotranspiration Mapping of Irrigated Field Crops Using Multispectral and Thermal Infrared Imagery with METRIC Energy Balance Model" Drones 4, no. 3: 52. https://doi.org/10.3390/drones4030052
APA StyleChandel, A. K., Molaei, B., Khot, L. R., Peters, R. T., & Stöckle, C. O. (2020). High Resolution Geospatial Evapotranspiration Mapping of Irrigated Field Crops Using Multispectral and Thermal Infrared Imagery with METRIC Energy Balance Model. Drones, 4(3), 52. https://doi.org/10.3390/drones4030052