
Detection and Characterization of Stressed Sweet Cherry Tissues Using Machine Learning

 , , ,
, , ,  and
and 
Abstract
:1. Introduction
- The production of chErry tRee dIsease deteCtion dAtaset (ERICA).
- A methodology leveraging Deep Learning and specifically the ResNet architecture.
2. Materials and Methods
2.1. Data Acquisition
- 1086 images of 1872 × 4160 and mixed image pixel resolutions (regular cameras).
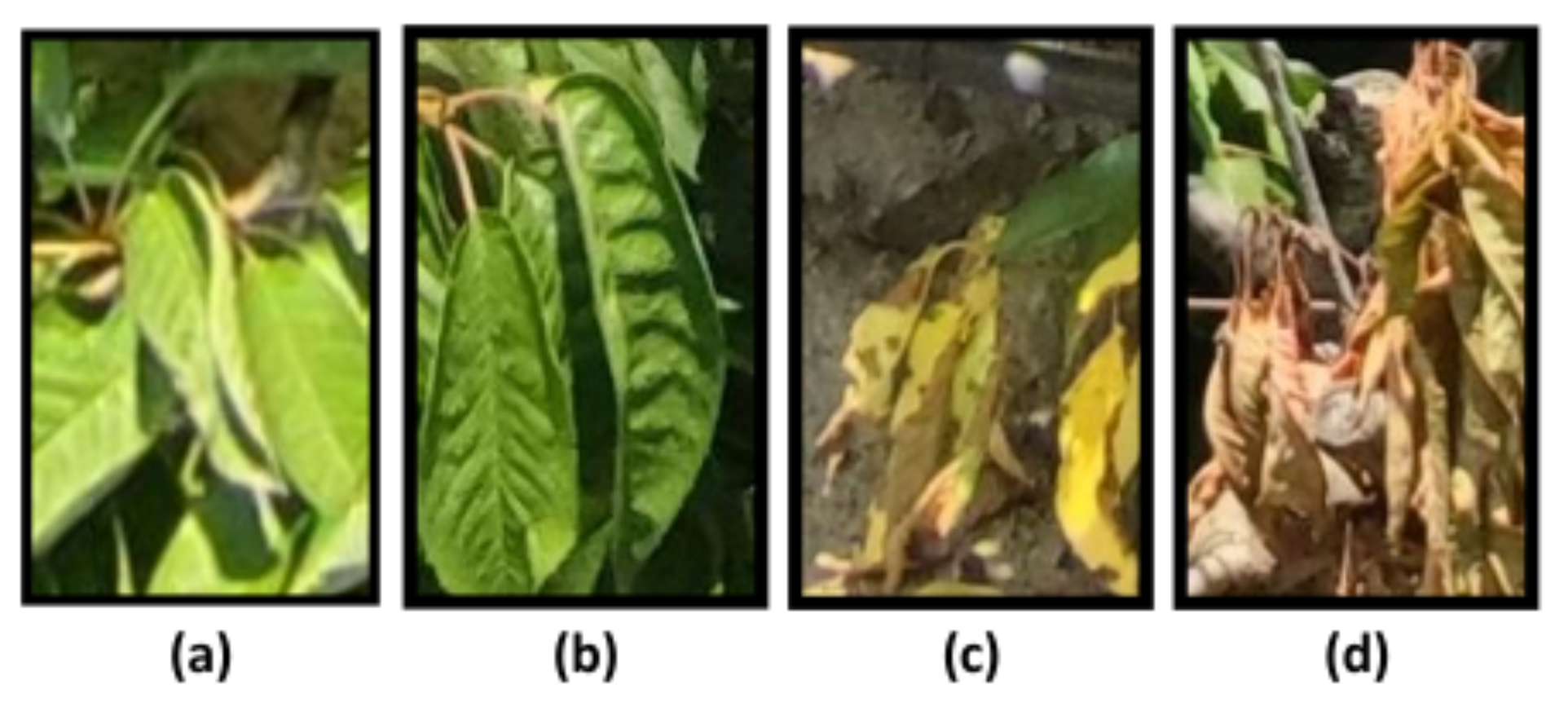
- Two classes of points interest on cherries trees.
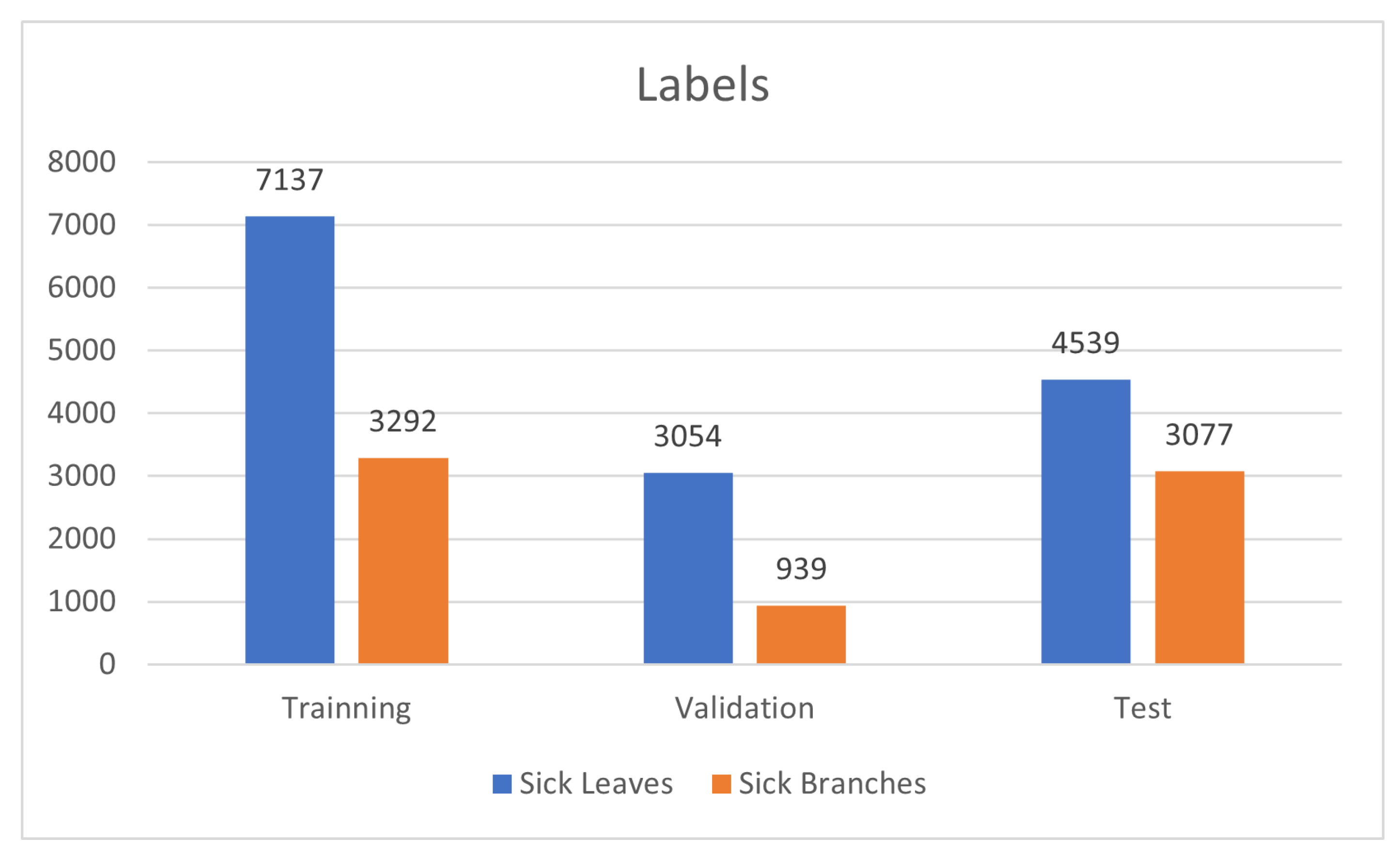
- Infected leaves class has 11,676 labels and infected branches 6369.
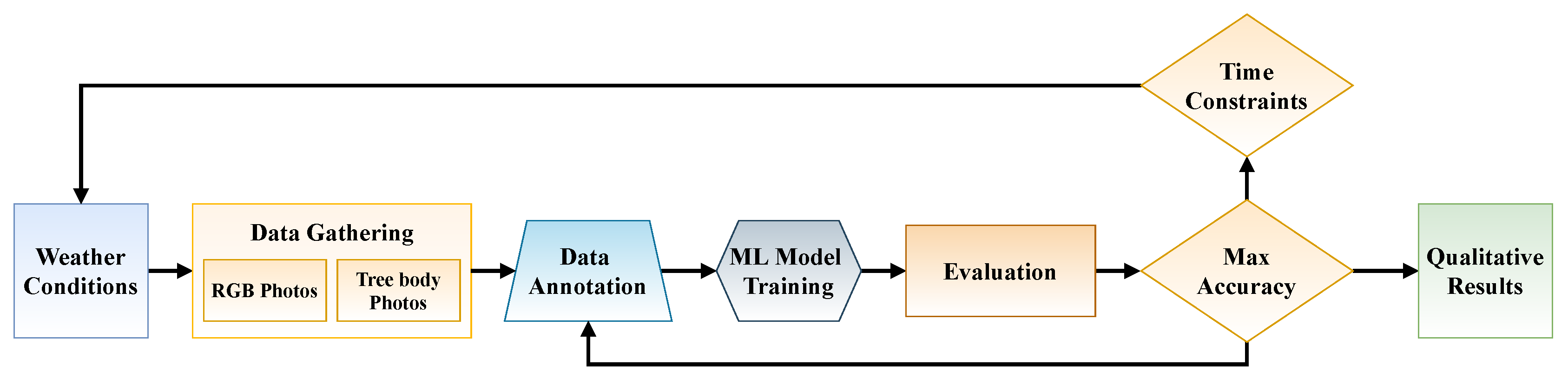
- The images were captured at a specific time during the day (midday).
- Manually annotation until reaching high accuracy and then contributing as assistance to the rest of the annotation.
- Ideal weather conditions (cloudless).
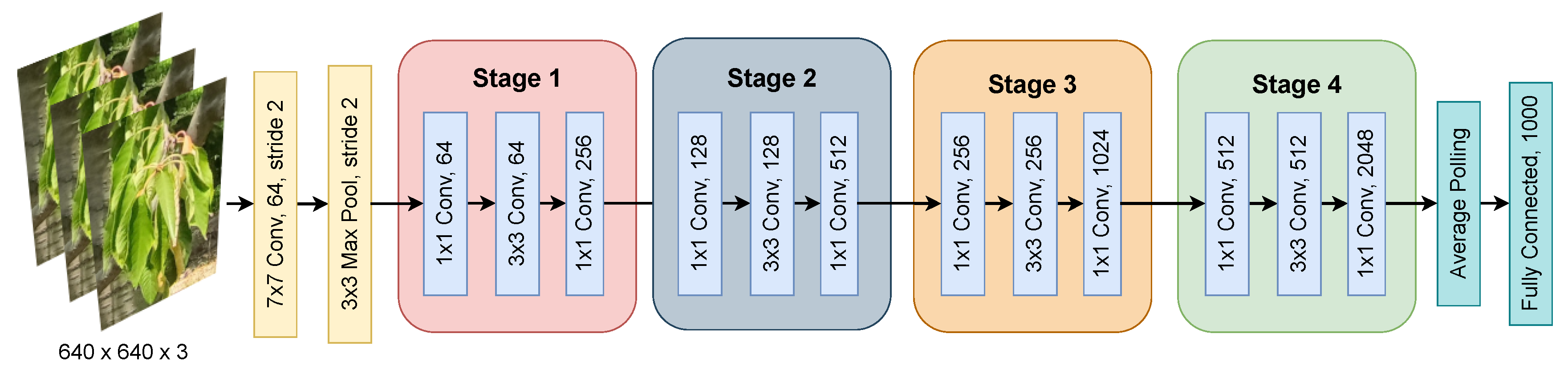
2.2. ResNet 50
2.3. Infected Leaf and Infected Branch Recognition
3. Results and Discussion
3.1. Data Preparation
3.2. Infected Tree Detection Evaluation
3.3. Ablation
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moysiadis, V.; Sarigiannidis, P.; Vitsas, V.; Khelifi, A. Smart Farming in Europe. Comput. Sci. Rev. 2021, 39, l100345. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Amatya, S.; Karkee, M.; Zhang, Q.; Whiting, M.D. Automated Detection of Branch Shaking Locations for Robotic Cherry Harvesting Using Machine Vision. Robotics 2017, 6, 31. [Google Scholar] [CrossRef] [Green Version]
- Kashyap, P.K.; Kumar, S.; Jaiswal, A.; Prasad, M.; Gandomi, A.H. Towards Precision Agriculture: IoT-Enabled Intelligent Irrigation Systems Using Deep Learning Neural Network. IEEE Sens. J. 2021, 21, 17479–17491. [Google Scholar] [CrossRef]
- Anand, T.; Sinha, S.; Mandal, M.; Chamola, V.; Yu, F.R. AgriSegNet: Deep Aerial Semantic Segmentation Framework for IoT-Assisted Precision Agriculture. IEEE Sens. J. 2021, 21, 17581–17590. [Google Scholar] [CrossRef]
- Siniosoglou, I.; Argyriou, V.; Bibi, S.; Lagkas, T.; Sarigiannidis, P. Unsupervised Ethical Equity Evaluation of Adversarial Federated Networks. In Proceedings of the 16th International Conference on Availability, Reliability and Security, Vienna, Austria, 17–20 August 2021; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Lakshmi, V.; Corbett, J. How Artificial Intelligence Improves Agricultural Productivity and Sustainability: A Global Thematic Analysis. 2020. Available online: https://scholarspace.manoa.hawaii.edu/handle/10125/64381 (accessed on 12 December 2021). [CrossRef] [Green Version]
- Devkota, P.; Iezzoni, A.; Gasic, K.; Reighard, G.; Hammerschmidt, R. Evaluation of the susceptibility of Prunus rootstock genotypes to Armillaria and Desarmillaria species. Eur. J. Plant Pathol. 2020, 158, 177–193. [Google Scholar] [CrossRef]
- Triantafyllou, A.; Sarigiannidis, P.; Bibi, S. Precision Agriculture: A Remote Sensing Monitoring System Architecture. Information 2019, 10, 348. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.T.; Lopez Caceres, M.L.; Moritake, K.; Kentsch, S.; Shu, H.; Diez, Y. Individual Sick Fir Tree (Abies mariesii) Identification in Insect Infested Forests by Means of UAV Images and Deep Learning. Remote Sens. 2021, 13, 260. [Google Scholar] [CrossRef]
- O’Shea, K.; Nash, R. An Introduction to Convolutional Neural Networks. arXiv 2015, arXiv:1511.08458. [Google Scholar]
- Deng, X.; Tong, Z.; Lan, Y.; Huang, Z. Detection and Location of Dead Trees with Pine Wilt Disease Based on Deep Learning and UAV Remote Sensing. AgriEngineering 2020, 2, 294–307. [Google Scholar] [CrossRef]
- Sri, M.; Naik, B.; Sankar, K. Object Detection Based on Faster R-Cnn. Int. J. Eng. Adv. Technol. 2021, 10, 72–76. [Google Scholar] [CrossRef]
- Zhu, H.; Yang, L.; Fei, J.; Zhao, L.; Han, Z. Recognition of carrot appearance quality based on deep feature and support vector machine. Comput. Electron. Agric. 2021, 186, 106185. [Google Scholar] [CrossRef]
- Mkonyi, L.; Rubanga, D.; Richard, M.; Zekeya, N.; Sawahiko, S.; Maiseli, B.; Machuve, D. Early identification of Tuta absoluta in tomato plants using deep learning. Sci. Afr. 2020, 10, e00590. [Google Scholar] [CrossRef]
- Mohanty, S.P.; Hughes, D.P.; Salathé, M. Using Deep Learning for Image-Based Plant Disease Detection. Front. Plant Sci. 2016, 7, 1419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hughes, D.P.; Salathe, M. An open access repository of images on plant health to enable the development of mobile disease diagnostics. arXiv 2016, arXiv:1511.08060. [Google Scholar]
- Matin, M.M.H.; Khatun, A.; Moazzam, M.; Uddin, M. An Efficient Disease Detection Technique of Rice Leaf Using AlexNet. J. Comput. Commun. 2020, 8, 49–57. [Google Scholar] [CrossRef]
- Alguliyev, R.; Imamverdiyev, Y.; Sukhostat, L.; Bayramov, R. Plant disease detection based on a deep model. Soft Comput. 2021, 25, 13229–13242. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, Y.; Sun, X.; Dai, H.; Chen, X. Intelligent Solutions in Chest Abnormality Detection Based on YOLOv5 and ResNet50. J. Healthc. Eng. 2021, 2021, 2267635. [Google Scholar] [CrossRef]
- Joshua, J.; Mmbaga, M.T. Perpetuation of Cherry Leaf Spot Disease in Ornamental Cherry. J. Phytopathol. 2015, 163, 194–201. [Google Scholar] [CrossRef]
- Devkota, P.; Hammerschmidt, R. The infection process of Armillaria mellea and Armillaria solidipes. Physiol. Mol. Plant Pathol. 2020, 112, 101543. [Google Scholar] [CrossRef]
- Crespo Palomo, M.; Lawrence, D.; Nouri, M.; Doll, D.; Trouillas, F. Characterization of Fusarium and Neocosmospora Species Associated With Crown Rot and Stem Canker of Pistachio Rootstocks in California. Plant Dis. 2019, 103, 1931–1939. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Carvalho, O.L.F.D.; de Carvalho Júnior, O.A.; Albuquerque, A.O.D.; Bem, P.P.D.; Silva, C.R.; Ferreira, P.H.G.; Moura, R.D.S.D.; Gomes, R.A.T.; Guimarães, R.F.; Borges, D.L. Instance Segmentation for Large, Multi-Channel Remote Sensing Imagery Using Mask-RCNN and a Mosaicking Approach. Remote Sens. 2021, 13, 39. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 658–666. [Google Scholar] [CrossRef] [Green Version]
- Hosang, J.; Benenson, R.; Schiele, B. Learning Non-Maximum Suppression. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 7–9 July 2015; Bach, F., Blei, D., Eds.; PMLR: Lille, France, 2015; Volume 37, pp. 448–456. [Google Scholar]
- Kandel, I.; Castelli, M. The effect of batch size on the generalizability of the convolutional neural networks on a histopathology dataset. ICT Express 2020, 6, 312–315. [Google Scholar] [CrossRef]
- You, Y.; Wang, Y.; Zhang, H.; Zhang, Z.; Demmel, J.; Hsieh, C.J. The Limit of the Batch Size. arXiv 2020, arXiv:2006.08517. [Google Scholar]
- Yan, B.; Pan, F.; Lei, X.; Liu, Z.; Yang, F. A Real-Time Apple Targets Detection Method for Picking Robot Based on Improved YOLOv5. Remote Sens. 2021, 13, 1619. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Batch | Precision | Pixels | Recall | mAP |
|---|---|---|---|---|---|
| yolov5s | 2 | 0.7 | 640 × 640 | 0.089 | 0.394 |
| 4 | 0.696 | 640 × 640 | 0.11 | 0.4 | |
| 8 | 0.675 | 640 × 640 | 0.108 | 0.388 | |
| 16 | 0.681 | 640 × 640 | 0.094 | 0.385 | |
| yolov5m | 2 | 0.646 | 640 × 640 | 0.094 | 0.367 |
| 4 | 0.653 | 640 × 640 | 0.075 | 0.363 | |
| 8 | 0.617 | 640 × 640 | 0.093 | 0.352 | |
| 16 | 0.861 | 640 × 640 | 0.053 | 0.456 | |
| yolov5l | 2 | 0.653 | 640 × 640 | 0.075 | 0.363 |
| 4 | 0.617 | 640 × 640 | 0.093 | 0.352 | |
| 8 | 0.79 | 640 × 640 | 0.051 | 0.42 | |
| 16 | 0.695 | 640 × 640 | 0.082 | 0.317 | |
| yolov5s6 | 2 | 0.512 | 1280 × 1280 | 0.079 | 0.286 |
| 4 | 0.494 | 1280 × 1280 | 0.05 | 0.263 | |
| 8 | 0.486 | 1280 × 1280 | 0.037 | 0.258 | |
| 16 | 0.56 | 1280 × 1280 | 0.028 | 0.292 | |
| yolov5m6 | 2 | 0.409 | 1280 × 1280 | 0.045 | 0.222 |
| 4 | 0.497 | 1280 × 1280 | 0.043 | 0.269 | |
| 8 | 0.445 | 1280 × 1280 | 0.056 | 0.247 | |
| 16 | 0.462 | 1280 × 1280 | 0.075 | 0.262 | |
| yolov5l6 | 2 | 0.402 | 1280 × 1280 | 0.056 | 0.221 |
| 4 | 0.402 | 1280 × 1280 | 0.073 | 0.227 | |
| 8 | 0.452 | 1280 × 1280 | 0.046 | 0.241 | |
| 16 | 0.435 | 1280 × 1280 | 0.032 | 0.263 |
| yolov5m | k = 25 | 50 | 70 | 90 |
|---|---|---|---|---|
| Precision | 0.861 | 0.625 | 0.695 | 0.426 |
| Recall | 0.053 | 0.068 | 0.082 | 0.064 |
| mAP | 0.456 | 0.328 | 0.387 | 0.240 |
| Hyperparameters | Scheme One | Scheme Two | Scheme Three |
|---|---|---|---|
| lr0 | 0.01 | 0.00258 | 0.0032 |
| lrf | 0.2 | 0.17 | 0.12 |
| momentum | 0.937 | 0.779 | 0.843 |
| weight_decay | 0.0005 | 0.00058 | 0.00036 |
| warmup_epochs | 3.0 | 1.33 | 2.0 |
| warmup_momentum | 0.8 | 0.86 | 0.5 |
| yolov5m | Scheme One | Scheme Two | Scheme Three |
|---|---|---|---|
| Precision | 0.861 | 0.631 | 0.827 |
| Recall | 0.053 | 0.062 | 0.004 |
| mAP | 0.456 | 0.346 | 0.416 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaschatzis, C.; Karaiskou, C.; Mouratidis, E.G.; Karagiannis, E.; Sarigiannidis, P.G. Detection and Characterization of Stressed Sweet Cherry Tissues Using Machine Learning. Drones 2022, 6, 3. https://doi.org/10.3390/drones6010003
Chaschatzis C, Karaiskou C, Mouratidis EG, Karagiannis E, Sarigiannidis PG. Detection and Characterization of Stressed Sweet Cherry Tissues Using Machine Learning. Drones. 2022; 6(1):3. https://doi.org/10.3390/drones6010003
Chicago/Turabian StyleChaschatzis, Christos, Chrysoula Karaiskou, Efstathios G. Mouratidis, Evangelos Karagiannis, and Panagiotis G. Sarigiannidis. 2022. "Detection and Characterization of Stressed Sweet Cherry Tissues Using Machine Learning" Drones 6, no. 1: 3. https://doi.org/10.3390/drones6010003
APA StyleChaschatzis, C., Karaiskou, C., Mouratidis, E. G., Karagiannis, E., & Sarigiannidis, P. G. (2022). Detection and Characterization of Stressed Sweet Cherry Tissues Using Machine Learning. Drones, 6(1), 3. https://doi.org/10.3390/drones6010003