
Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection

 , ,
, , 
Abstract
:1. Introduction
- First, it enables the drone to follow the planned path, which lies in the middle of the underlying PV module row, with greater accuracy. Due to the higher navigation accuracy, the system is robust to the wrong placement of the GPS waypoints (e.g., chosen with Google Earth before the mission’s start): this, in its turn, prevents the drone from flying over empty areas between two parallel PV module rows, collecting useless data, and wasting time and battery autonomy.
- Second, it enables the drone to fly at a lower height to the ground, capturing details on the PV module surfaces otherwise impossible to see (possibly including PV panels’ serial numbers) while reducing the oscillations in position generated by noise in GPS localization.
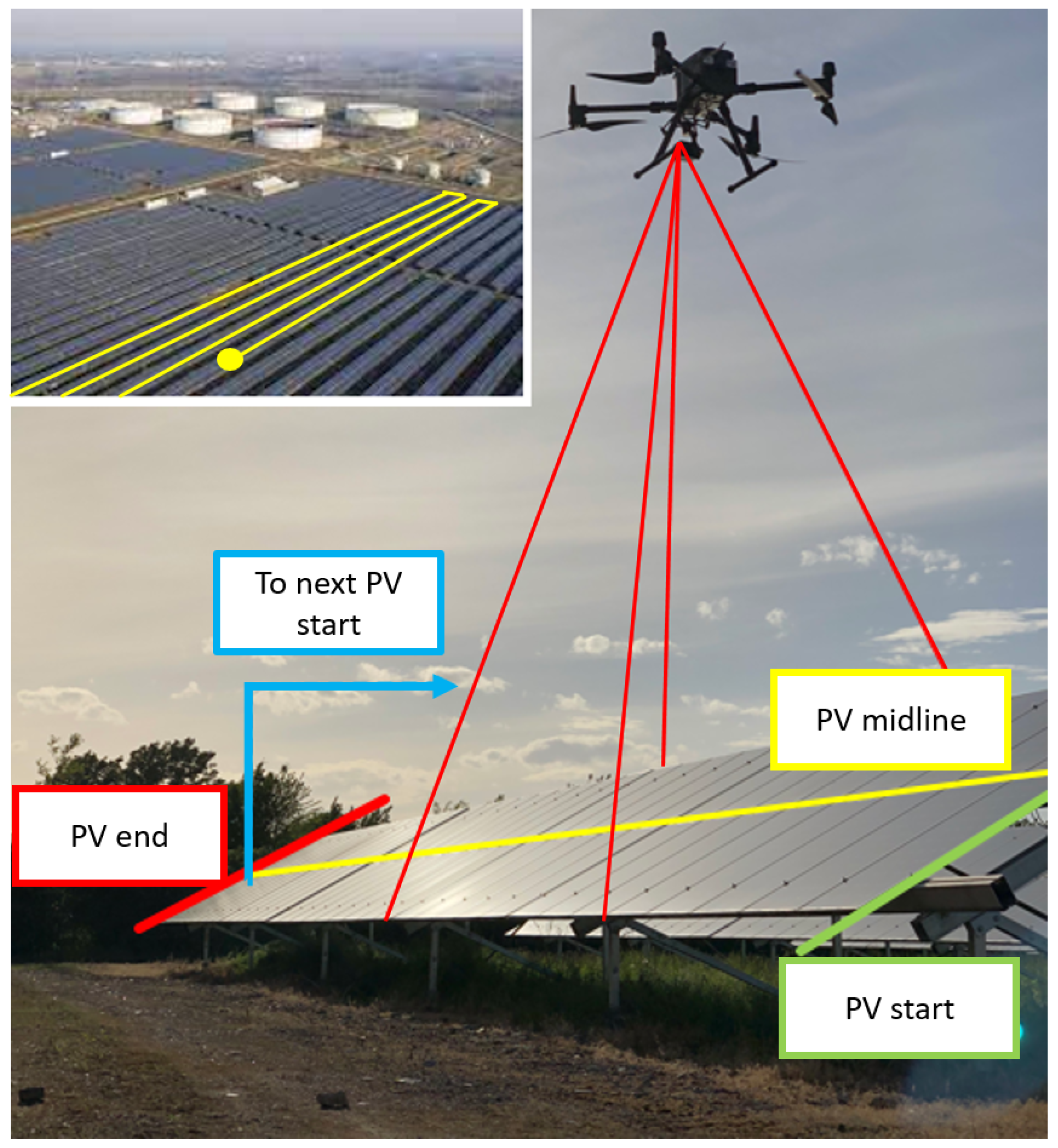
- PV midline, a straight line in the middle of the PV module row that determines the desired motion direction;
- PV end, a point on the PV midline that identifies the end of the PV module row;
- PV start, a point that identifies the start of the new PV module row, whose position is computed with respect to the end of the previous row.
2. State of the Art
3. System Architecture
- A procedure for detecting PV modules in real time using a thermal or an RGB camera (or both);
- A procedure for correcting errors in the relative position of the PV midline, initially estimated through GPS, by merging thermal and RGB data;
- A navigation system provided with a sequence of georeferenced waypoints defining an inspection path over the PV plant, which uses the estimated position of the PV midline for making the UAV move along the path through visual servoing.
- the path goes from a PV start to a PV end waypoint when moving along a PV row: in this case, the distance between PV start and PV end defines how far a PV midline shall be followed before moving to the next one;
- the path goes from a PV end to a PV start waypoint when jumping to the next PV row: in this case, the position of PV start relative to PV end defines the start of the new row with respect to the previous one.
4. Detection of PV Modules
4.1. Segmentation of PV Modules via Thermal Camera
- the corresponding regression lines tend to be parallel;
- the average point–line distance between all pixels in the image plane belonging to the first line and the second line is below a threshold, i.e., the two lines tend to be close to each other.
4.2. Segmentation of PV Modules via RGB Camera
4.3. Threshold Tuning
5. UAV Navigation
5.1. From the Image Frame I to the Camera Frame C
5.2. Path Estimation through EKF
5.3. Path Following
6. Material and Methods
- The DJI Matrice Simulator embedded in the DJI Matrice 300. When the DJI Manifold is connected to the drone and the OSDK is enabled, this program simulates the UAV dynamics based on the commands received from the ROS nodes executed on the DJI Manifold.
- The Gazebo Simulator, running on an external Dell XPS notebook with an Intel i7 processor and 16 GB of RAM, integrated with ROS. Here, only the thermal and RGB cameras and the related gimbal mechanism are simulated to provide the DJI Manifold with images acquired in the simulated PV plant.
7. Results
7.1. Threshold Optimization Time
7.2. Results in Simulation
- Section 7.2.1 reports the simulated experiments with the thermal camera only, RGB camera only, and both cameras for PV module detection. Here, we do not consider errors in waypoints, which are correctly located on the midlines of the corresponding PV rows.
- Section 7.2.2 reports the simulated experiments with both cameras to assess the robustness of the approach in the presence of errors in waypoint positioning.
7.2.1. Navigation with Thermal Camera Only, RGB Camera Only, and Both Cameras
7.2.2. Navigation with Errors in Waypoint Positions
7.3. Results in Real-World Experiments
- Section 7.3.1 explores navigation along one PV module row using the thermal camera only, RGB camera only, and both cameras.
- Section 7.3.2 explore navigation along four PV rows using both thermal and RGB cameras.
7.3.1. Navigation along One Row
7.3.2. Navigation with Both Cameras along Four Rows
8. Conclusions
- A procedure for detecting PV modules in real time using a thermal or an RGB camera (or both);
- A procedure to correct errors in the relative position of the PV midline, initially estimated through GPS, by merging thermal and RGB data;
- A navigation system provided with a sequence of georeferenced waypoints defining an inspection path over the PV plant, which uses the estimated position of the PV midline to make the UAV move along the path with bounded navigation errors.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Heinberg, R.; Fridley, D. Our Renewable Future: Laying the Path for One Hundred Percent Clean Energy; Island Press: Washington, DC, USA, 2016; pp. 1–15. [Google Scholar]
- Renewable Energy Statistics. Eurostat. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Renewable_energy_statistics (accessed on 6 November 2022).
- Petrone, G.; Spagnuolo, G.; Teodorescu, R.; Veerachary, M.; Vitelli, M. Reliability Issues in Photovoltaic Power Processing Systems. IEEE Trans. Ind. Electron. 2008, 55, 2569–2580. [Google Scholar] [CrossRef]
- Grimaccia, F.; Leva, S.; Dolara, A.; Aghaei, M. Survey on PV Modules Common Faults after OM Flight Extensive Campaign over Different Plants in Italy. IEEE J. Photovolt. 2017, 7, 810–816. [Google Scholar] [CrossRef] [Green Version]
- Tsanakas, J.A.; Ha, L.; Buerhop, C. Faults and infrared thermographic diagnosis in operating c-Si photovoltaic modules: A review of research and future challenges. Renew. Sust. Energ. Rev. 2016, 62, 695–709. [Google Scholar] [CrossRef]
- Quater, P.B.; Grimaccia, F.; Leva, S.; Mussetta, M.; Aghaei, M. Light Unmanned Aerial Vehicles (UAVs) for Cooperative Inspection of PV Plants. IEEE J. Photovol. 2014, 4, 1107–1113. [Google Scholar] [CrossRef] [Green Version]
- Carletti, V.; Greco, A.; Saggese, A.; Vento, M. Multi-Object Tracking by Flying Cameras Based on a Forward-Backward Interaction. IEEE Access 2018, 6, 43905–43919. [Google Scholar] [CrossRef]
- Djordjevic, S.; Parlevliet, D.; Jennings, P. Detectable faults on recently installed solar modules in Western Australia. Renew. Energy 2014, 67, 215–221. [Google Scholar] [CrossRef] [Green Version]
- Roggi, G.; Niccolai, A.; Grimaccia, F.; Lovera, M. A Computer Vision Line-Tracking Algorithm for Automatic UAV Photovoltaic Plants Monitoring Applications. Energies 2020, 13, 838. [Google Scholar] [CrossRef] [Green Version]
- Hartmut, S.; Dirk, H.; Blumenthal, S.; Linder, T.; Molitor, P.; Tretyakov, V. Teleoperated Visual Inspection and Surveillance with Unmanned Ground and Aerial Vehicles. Int. J. Online Biomed. Eng. 2020, 13, 26–38. [Google Scholar]
- Rathinam, S.; Kim, Z.; Soghikian, A.; Sengupta, R. Vision Based Following of Locally Linear Structures using an Unmanned Aerial Vehicle. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 6085–6090. [Google Scholar]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected Using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef] [Green Version]
- Metni, N.; Hamel, T. A UAV for bridge inspection: Visual servoing control law with orientation limits. Autom. Constr. 2007, 17, 3–10. [Google Scholar] [CrossRef]
- Aghaei, M.; Dolara, A.; Leva, S.; Grimaccia, F. Image resolution and defects detection in PV inspection by unmanned technologies. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Zefri, Y.; Elkettani, A.; Sebari, I.; Lamallam, S. Thermal infrared and visual inspection of photovoltaic installations by uav photogrammetry—Application case: Morocco. Drones 2018, 2, 41. [Google Scholar] [CrossRef]
- Zefri, Y.; Sebari, I.; Hajji, H.; Aniba, G. Developing a deep learning-based layer-3 solution for thermal infrared large-scale photovoltaic module inspection from orthorectified big UAV imagery data. Int. J. Appl. Earth Obs. Geoinf. 2022, 106, 102652. [Google Scholar] [CrossRef]
- Hassan, S.A.; Han, S.H.; Shin, S.Y. Real-time Road Cracks Detection based on Improved Deep Convolutional Neural Network. In Proceedings of the 2020 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), London, ON, Canada, 30 August–2 September 2020; pp. 1–4. [Google Scholar]
- Pan, Y.; Zhang, X.; Cervone, G.; Yang, L. Detection of Asphalt Pavement Potholes and Cracks Based on the Unmanned Aerial Vehicle Multispectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3701–3712. [Google Scholar] [CrossRef]
- Zhang, F.; Fan, Y.; Cai, T.; Liu, W.; Hu, Z.; Wang, N.; Wu, M. OTL-Classifier: Towards Imaging Processing for Future Unmanned Overhead Transmission Line Maintenance. Electronics 2019, 8, 1270. [Google Scholar] [CrossRef] [Green Version]
- Zormpas, A.; Moirogiorgou, K.; Kalaitzakis, K.; Plokamakis, G.A.; Partsinevelos, P.; Giakos, G.; Zervakis, M. Power Transmission Lines Inspection using Properly Equipped Unmanned Aerial Vehicle (UAV). In Proceedings of the 2018 IEEE International Conference on Imaging Systems and Techniques (IST), Krakow, Poland, 16–18 October 2018; pp. 1–5. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the NIPS’15, Montreal, QC, Canada, 7–12 December 2015. [Google Scholar]
- Duda, R.; Hart, P. Use of the Hough Transformation to Detect Lines and Curves in Pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Tsanakas, J.A.; Ha, L.D.; Al Shakarchi, F. Advanced inspection of photovoltaic installations by aerial triangulation and terrestrial georeferencing of thermal/visual imagery. Renew. Energy 2017, 102, 224–233. [Google Scholar] [CrossRef]
- Li, X.; Yang, Q.; Lou, Z.; Yan, W. Deep Learning Based Module Defect Analysis for Large-Scale Photovoltaic Farms. IEEE Trans. Energy Convers. 2019, 34, 520–529. [Google Scholar] [CrossRef]
- Huerta Herraiz, A.; Pliego Marugán, A.; García Márquez, F.P. Photovoltaic plant condition monitoring using thermal images analysis by convolutional neural network-based structure. Renew. Energy 2020, 153, 334–348. [Google Scholar] [CrossRef] [Green Version]
- Carletti, V.; Greco, A.; Saggese, A.; Vento, M. An intelligent flying system for automatic detection of faults in photovoltaic plants. J. Ambient Intell. Humaniz. Comput. 2020, 11, 2027–2040. [Google Scholar] [CrossRef]
- Fernández, A.; Usamentiaga, R.; de Arquer, P.; Fernández, M.; Fernández, D.; Carús, J.; Fernández, M. Robust detection, classification and localization of defects in large photovoltaic plants based on unmanned aerial vehicles and infrared thermography. Appl. Sci. 2020, 10, 5948. [Google Scholar] [CrossRef]
- Chiang, W.H.; Wu, H.S.; Wu, J.S.; Lin, S.J. A Method for Estimating On-Field Photovoltaics System Efficiency Using Thermal Imaging and Weather Instrument Data and an Unmanned Aerial Vehicle. Energies 2022, 15, 5835. [Google Scholar] [CrossRef]
- Zefri, Y.; Elkcttani, A.; Sebari, I.; Lamallam, S.A. Inspection of Photovoltaic Installations by Thermo-visual UAV Imagery Application Case: Morocco. In Proceedings of the 2017 International Renewable and Sustainable Energy Conference (IRSEC), Tangier, Morocco, 4–7 December 2017; pp. 1–6. [Google Scholar]
- Souffer, I.; Sghiouar, M.; Sebari, I.; Zefri, Y.; Hajji, H.; Aniba, G. Automatic Extraction of Photovoltaic Panels from UAV Imagery with Object-Based Image Analysis and Machine Learning. Lect. Notes Electr. Eng. 2022, 745, 699–709. [Google Scholar]
- Solend, T.; Jonas Fossum Moen, H.; Rodningsby, A. Modelling the impact of UAV navigation errors on infrared PV inspection data quality and efficiency. In Proceedings of the 2021 IEEE 48th Photovoltaic Specialists Conference (PVSC), Fort Lauderdale, FL, USA, 20–25 June 2021; pp. 991–996. [Google Scholar]
- Moradi Sizkouhi, A.M.; Majid Esmailifar, S.; Aghaei, M.; Vidal de Oliveira, A.K.; Rüther, R. Autonomous Path Planning by Unmanned Aerial Vehicle (UAV) for Precise Monitoring of Large-Scale PV plants. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019. [Google Scholar]
- Moradi Sizkouhi, A.M.; Aghaei, M.; Esmailifar, S.M.; Mohammadi, M.R.; Grimaccia, F. Automatic Boundary Extraction of Large-Scale Photovoltaic Plants Using a Fully Convolutional Network on Aerial Imagery. IEEE J. Photovol. 2020, 10, 1061–1067. [Google Scholar] [CrossRef]
- Moradi Sizkouhi, A.M.; Aghaei, M.; Esmailifar, S.M. Aerial Imagery of PV Plants for Boundary Detection; IEEE Dataport: New York, NY, USA, 2020; Available online: https://ieee-dataport.org/documents/aerial-imagery-pv-plants-boundary-detection (accessed on 6 November 2020).
- Pérez-González, A.; Benítez-Montoya, N.; Jaramillo-Duque, A.; Cano-Quintero, J. Coverage path planning with semantic segmentation for UAV in PV plants. Appl. Sci. 2021, 11, 12093. [Google Scholar] [CrossRef]
- Le, W.; Xue, Z.; Chen, J.; Zhang, Z. Coverage Path Planning Based on the Optimization Strategy of Multiple Solar Powered Unmanned Aerial Vehicles. Drones 2022, 6, 203. [Google Scholar] [CrossRef]
- Raguram, R.; Frahm, J.M.; Pollefeys, M. A Comparative Analysis of RANSAC Techniques Leading to Adaptive Real-Time Random Sample Consensus. In Proceedings of the ECCV’08; Forsyth, D., Torr, P., Zisserman, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 500–513. [Google Scholar]
- Majeed, A.; Abbas, M.; Qayyum, F.; Miura, K.T.; Misro, M.Y.; Nazir, T. Geometric Modeling Using New Cubic Trigonometric B-Spline Functions with Shape Parameter. Mathematics 2020, 8, 2102. [Google Scholar] [CrossRef]
- Sarapura, J.A.; Roberti, F.; Carelli, R.; Sebastián, J.M. Passivity based visual servoing of a UAV for tracking crop lines. In Proceedings of the 2017 XVII Workshop on Information Processing and Control (RPIC), Mar del Plata, Argentina, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Li, G.Y.; Soong, R.T.; Liu, J.S.; Huang, Y.T. UAV System Integration of Real-time Sensing and Flight Task Control for Autonomous Building Inspection Task. In Proceedings of the 2019 International Conference on Technologies and Applications of Artificial Intelligence (TAAI), Kaohsiung, Taiwan, 21–23 November 2019. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the ECCV’18, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Shahoud, A.; Shashev, D.; Shidlovskiy, S. Visual Navigation and Path Tracking Using Street Geometry Information for Image Alignment and Servoing. Drones 2022, 6, 107. [Google Scholar] [CrossRef]
- Xi, Z.; Lou, Z.; Sun, Y.; Li, X.; Yang, Q.; Yan, W. A Vision-Based Inspection Strategy for Large-Scale Photovoltaic Farms Using an Autonomous UAV. In Proceedings of the 2018 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuxi, China, 19–23 October 2018; pp. 200–203. [Google Scholar]
- Barredo Arrieta, A.; Díaz-Rodríguez, N.; Del Ser, J.; Bennetot, A.; Tabik, S.; Barbado, A.; Garcia, S.; Gil-Lopez, S.; Molina, D.; Benjamins, R.; et al. Explainable Explainable Artificial Intelligence (XAI): Concepts, taxonomies, opportunities and challenges toward responsible AI. Inf. Fusion 2020, 58, 82–115. [Google Scholar] [CrossRef] [Green Version]
- Thys, S.; Ranst, W.; Goedeme, T. Fooling automated surveillance cameras: Adversarial patches to attack person detection. In Proceedings of the CVPR’19, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Haponik, A. Fly to the Sky! With AI. How Is Artificial Intelligence Used in Aviation? Available online: https://addepto.com/fly-to-the-sky-with-ai-how-is-artificial-intelligence-used-in-aviation/ (accessed on 6 November 2022).
- Schirmer, S.; Torens, C.; Nikodem, F.; Dauer, J. Considerations of Artificial Intelligence Safety Engineering for Unmanned Aircraft. In Proceedings of the SAFECOMP’18; Gallina, B., Skavhaug, A., Schoitsch, E., Bitsch, F., Eds.; Springer: Cham, Switzerland, 2018; pp. 465–472. [Google Scholar]
- ROS—Robot Operating System. Available online: https://www.ros.org (accessed on 6 November 2022).
- Zhu, C.; Byrd, R.; Lu, P.; Nocedal, J. Algorithm 778: L-BFGS-B: Fortran Subroutines for Large-Scale Bound-Constrained Optimization. ACM Trans. Math. Softw. 1997, 23, 550–560. [Google Scholar] [CrossRef]
- Daum, F.E. Extended Kalman Filters. In Encyclopedia of Systems and Control; Baillieul, J., Samad, T., Eds.; Springer: London, UK, 2015; pp. 411–413. [Google Scholar]
- Capezio, F.; Sgorbissa, A.; Zaccaria, R. GPS-based localization for a surveillance UGV in outdoor areas. In Proceedings of the RoMoCo’05, Dymaczewo, Poland, 23–25 June 2005; pp. 157–162. [Google Scholar]
- Sgorbissa, A. Integrated robot planning, path following, and obstacle avoidance in two and three dimensions: Wheeled robots, underwater vehicles, and multicopters. Int. J. Rob. Res. 2019, 38, 853–876. [Google Scholar] [CrossRef]
- Recchiuto, C.; Sgorbissa, A.; Zaccaria, R. Visual feedback with multiple cameras in a UAVs Human-Swarm Interface. Robot. Auton. Syst. 2016, 80, 43–54. [Google Scholar] [CrossRef]
- Tang, J.; Chen, X.; Zhu, X.; Zhu, F. Dynamic Reallocation Model of Multiple Unmanned Aerial Vehicle Tasks in Emergent Adjustment Scenarios. IEEE Trans. Aerosp. Electron. Syst. 2022, 1–43. [Google Scholar] [CrossRef]
- Piaggio, M.; Sgorbissa, A.; Zaccaria, R. Autonomous navigation and localization in service mobile robotics. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 4, pp. 2024–2029. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test # | [s] | [s] | [s] | Month | Time of Day |
|---|---|---|---|---|---|
| 1 | 78.2 | 34.7 | 112.9 | Jun | 9:25 am |
| 2 | 85.1 | 55.2 | 140.3 | Oct | 10:26 am |
| 3 | 72.3 | 49.0 | 121.3 | Jul | 12:09 pm |
| 4 | 68.6 | 38.9 | 107.6 | Oct | 1:20 pm |
| 5 | 82.3 | 44.5 | 126.8 | Mar | 3:19 pm |
| Test # | [m] | [m] | RMSE [m] | RMSE | RMSE [m] |
|---|---|---|---|---|---|
| Thermal camera | 0.022 | 0.031 | 0.178 | 0.015 | 0.173 |
| RGB camera | 0.032 | 0.036 | 0.246 | 0.018 | 0.218 |
| Both cameras | 0.026 | 0.036 | 0.153 | 0.016 | 0.122 |
| Test # | [m] | [m] | RMSE [m] |
|---|---|---|---|
| Thermal camera | 0.012 | 0.010 | 0.157 |
| RGB camera | 0.023 | 0.019 | 0.128 |
| Both cameras | 0.010 | 0.008 | 0.055 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morando, L.; Recchiuto, C.T.; Calla, J.; Scuteri, P.; Sgorbissa, A. Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection. Drones 2022, 6, 347. https://doi.org/10.3390/drones6110347
Morando L, Recchiuto CT, Calla J, Scuteri P, Sgorbissa A. Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection. Drones. 2022; 6(11):347. https://doi.org/10.3390/drones6110347
Chicago/Turabian StyleMorando, Luca, Carmine Tommaso Recchiuto, Jacopo Calla, Paolo Scuteri, and Antonio Sgorbissa. 2022. "Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection" Drones 6, no. 11: 347. https://doi.org/10.3390/drones6110347
APA StyleMorando, L., Recchiuto, C. T., Calla, J., Scuteri, P., & Sgorbissa, A. (2022). Thermal and Visual Tracking of Photovoltaic Plants for Autonomous UAV Inspection. Drones, 6(11), 347. https://doi.org/10.3390/drones6110347