

UAV-Aided Wireless Energy Transfer for Sustaining Internet of Everything in 6G


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Key Challenges
2.1. Adaptation to the Non-Linear EH of GDs
2.2. Diversified Energy Demands in IoE
2.3. Integration of UAV-Aided WET into 6G Wireless Communications
3. Novel Solutions
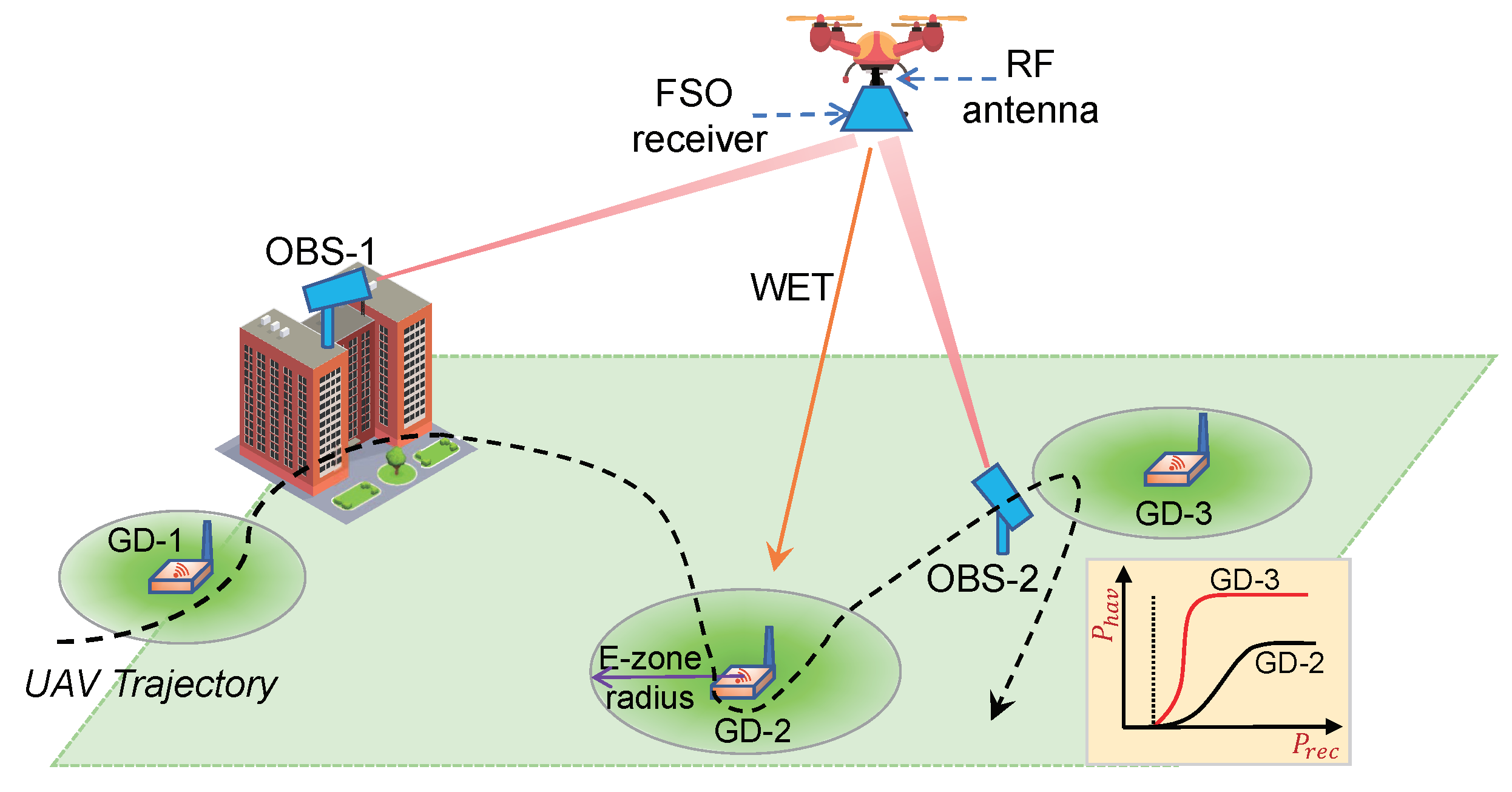
3.1. Enhancing UAV’s WET via Harvesting FSO Energy
3.2. Energy-Demand Aware Trajectory for Hierarchical WET
3.3. Multi-UAV Cooperation for Sustaining GD Communications
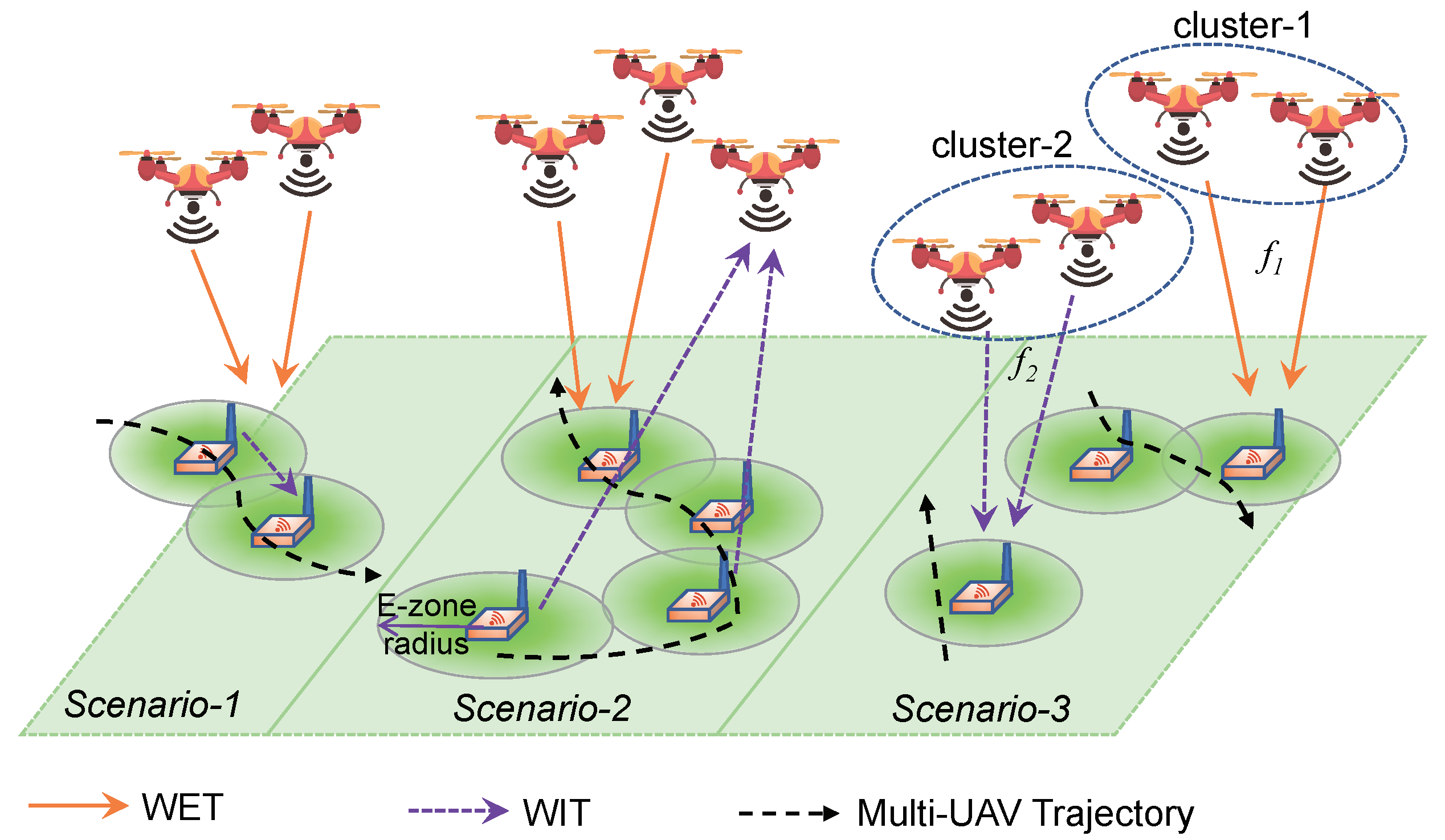
- Exploiting UAVs’ WETs to power WITs between GDs: As shown in Scenario-1 in Figure 4, multiple UAVs transmit energy cooperatively to sustain the ground-to-ground (G2G) communications between the GDs. The GDs’ various quality-of-service (QoS) requirements for communications are constrained by their available energy for G2G WITs, which in turn are converted as the GDs’ diversified energy demands under the UAVs’ cooperative WETs. The hierarchical WET proposed in the last subsection can then be extended to the multi-UAV case, for a joint design of the UAVs’ cooperative energy beaming as in, e.g., Refs. [9,13] and their energy-demand aware trajectories.
- Exploiting UAVs’ WETs to power GDs’ WITs to the UAVs: As shown in Scenario-2 in Figure 4, the UAVs’ cooperative energy beaming are performed to sustain the GDs’ uplink WITs. Due to the GDs’ diversified energy and communication demands, the UAVs’ WET to a GD in the downlink may occur simultaneously with another fully-charged GD’s WIT in the uplink. To avoid such co-channel interference, we apply the time-division-multiple-access (TDMA) based protocol to coordinate the UAVs’ cooperative energy beaming in the downlink and different GDs’ WITs in the uplink along the UAVs’ energy-demand aware trajectories, under the GDs’ RF EH constraints to sustain their WITs.
- Joint WETs and WITs from the UAVs to the GDs: As shown in Scenario-3 in Figure 4, the UAVs are grouped into multiple clusters, each of which dedicatedly serves a group of GDs. The UAV clusters can adopt different trajectories to serve different GD groups. As each UAV can freely switch between WET and WIT, we assign different operation frequency bands for different UAV clusters to avoid their inter-cluster interference; and for the case within a cluster, by adopting a dynamic WET and WIT protocol as in Ref. [11], the UAVs jointly and adaptively determine their WET and WIT status over different slots under the GDs’ RF EH constraints to sustain their information reception, where each GD’s QoS requirement is also met by properly controlling the intra-cluster interference during the UAVs’ cooperative WIT.
4. Performance Evaluations and Discussions
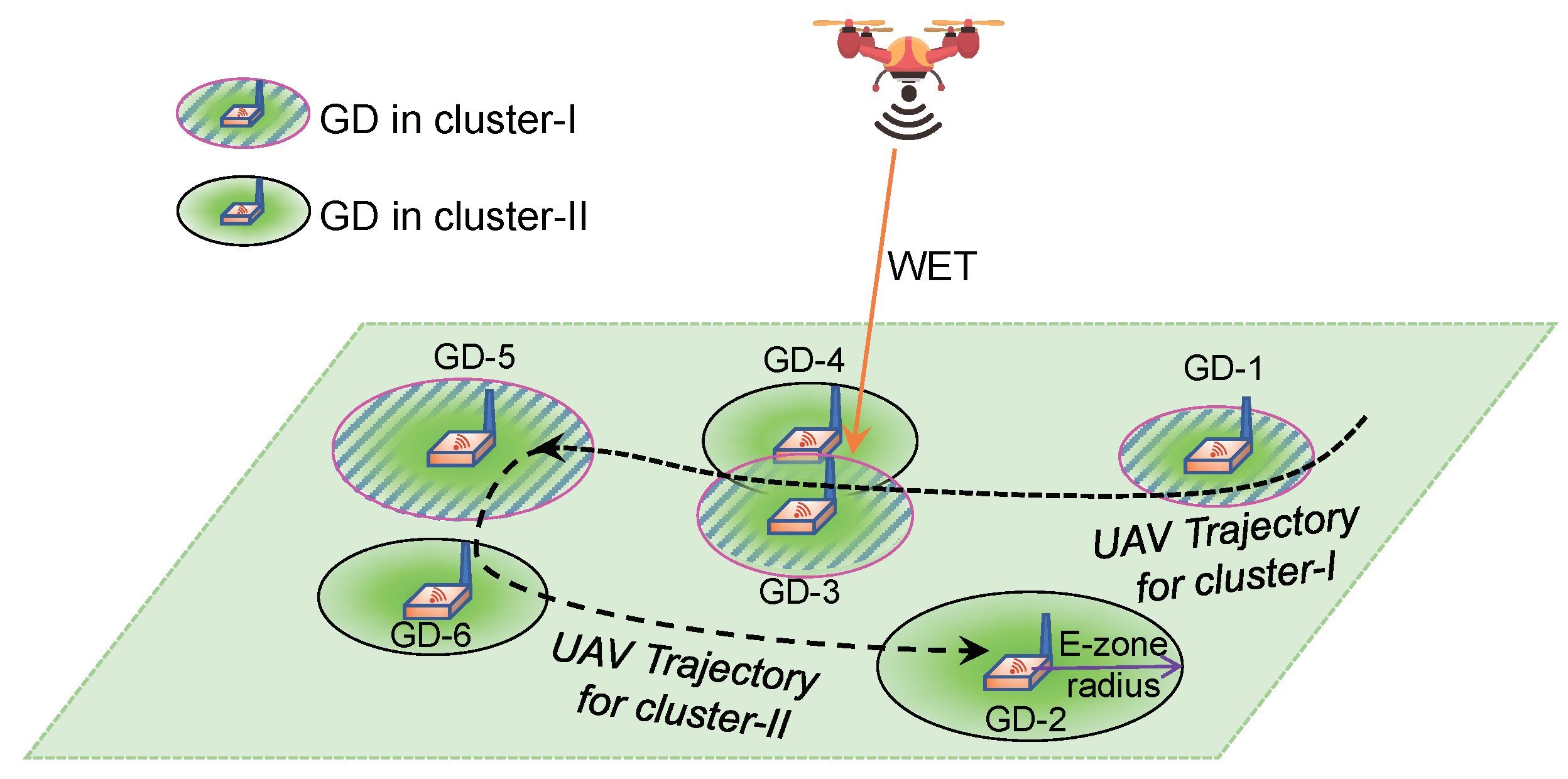
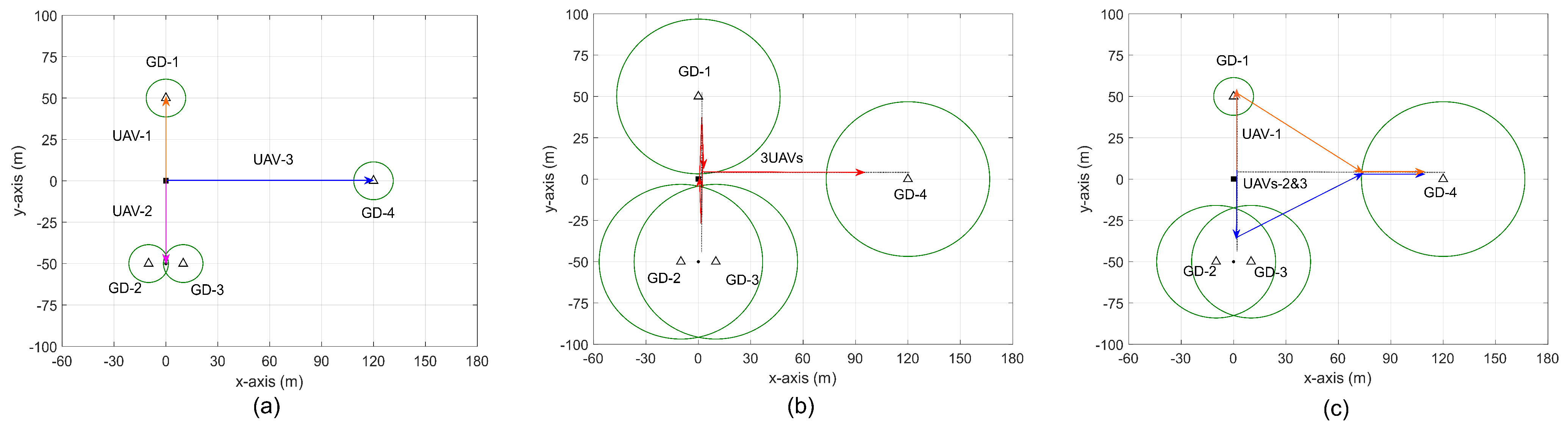
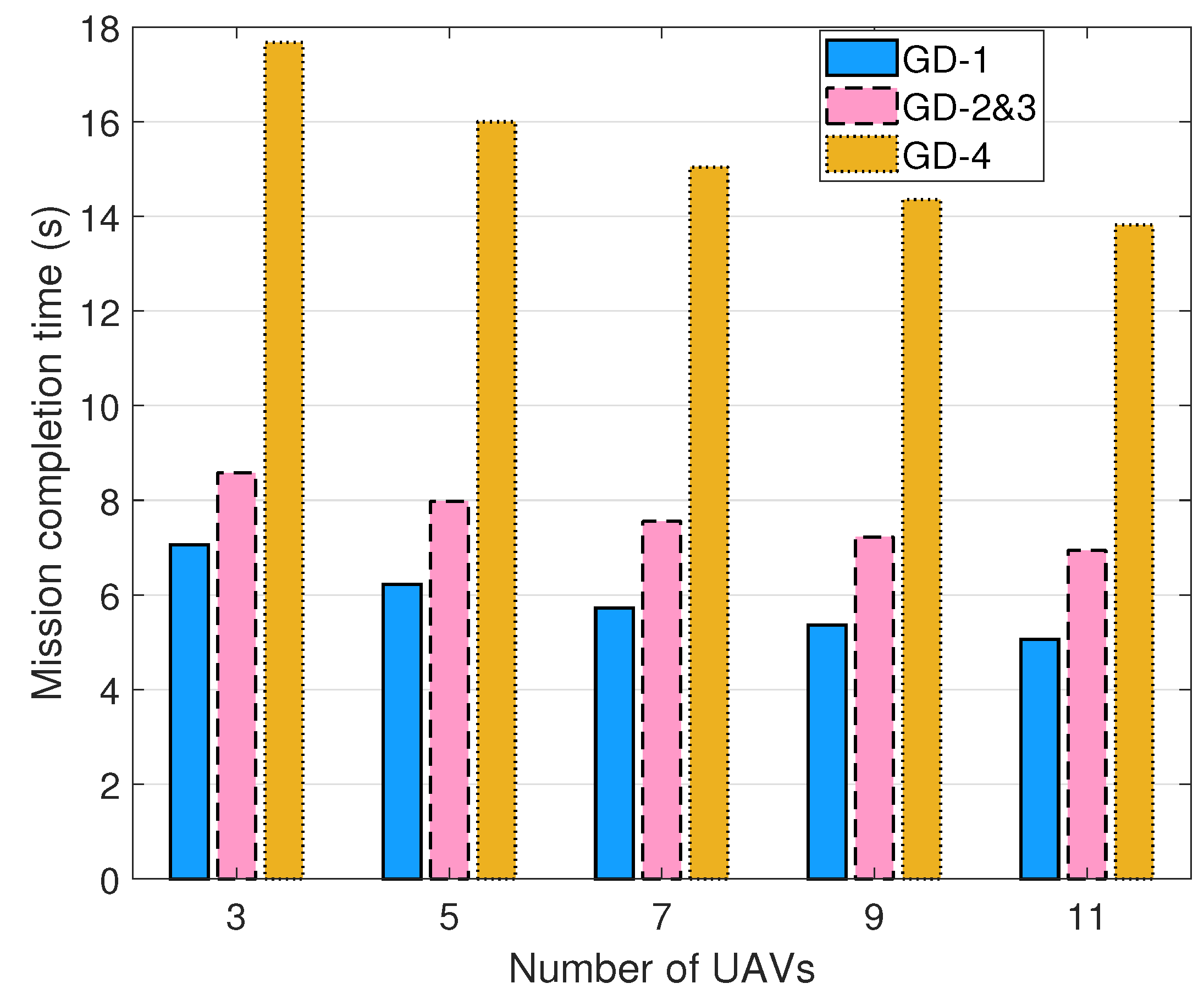
- GD-1 requires to harvest 50 mW·s of energy from the UAVs’ WETs, and then uses the harvested energy to receive the UAVs’ downlink information file of 10 Mbits. Its communication latency tolerance is 8 s.
- Both GD-2 and GD-3 require to harvest 40 mW·s of energy from the UAVs’ WETs, to power GD-2’s transmission of an information file of 5 Mbits to GD-3. Their communication latency tolerance is 12 s.
- GD-4 does not communicate, but requires to harvest 340 mW·s of energy from the UAVs’ WETs (e.g., for sensing purposes). Its energy latency tolerance is 40 s.
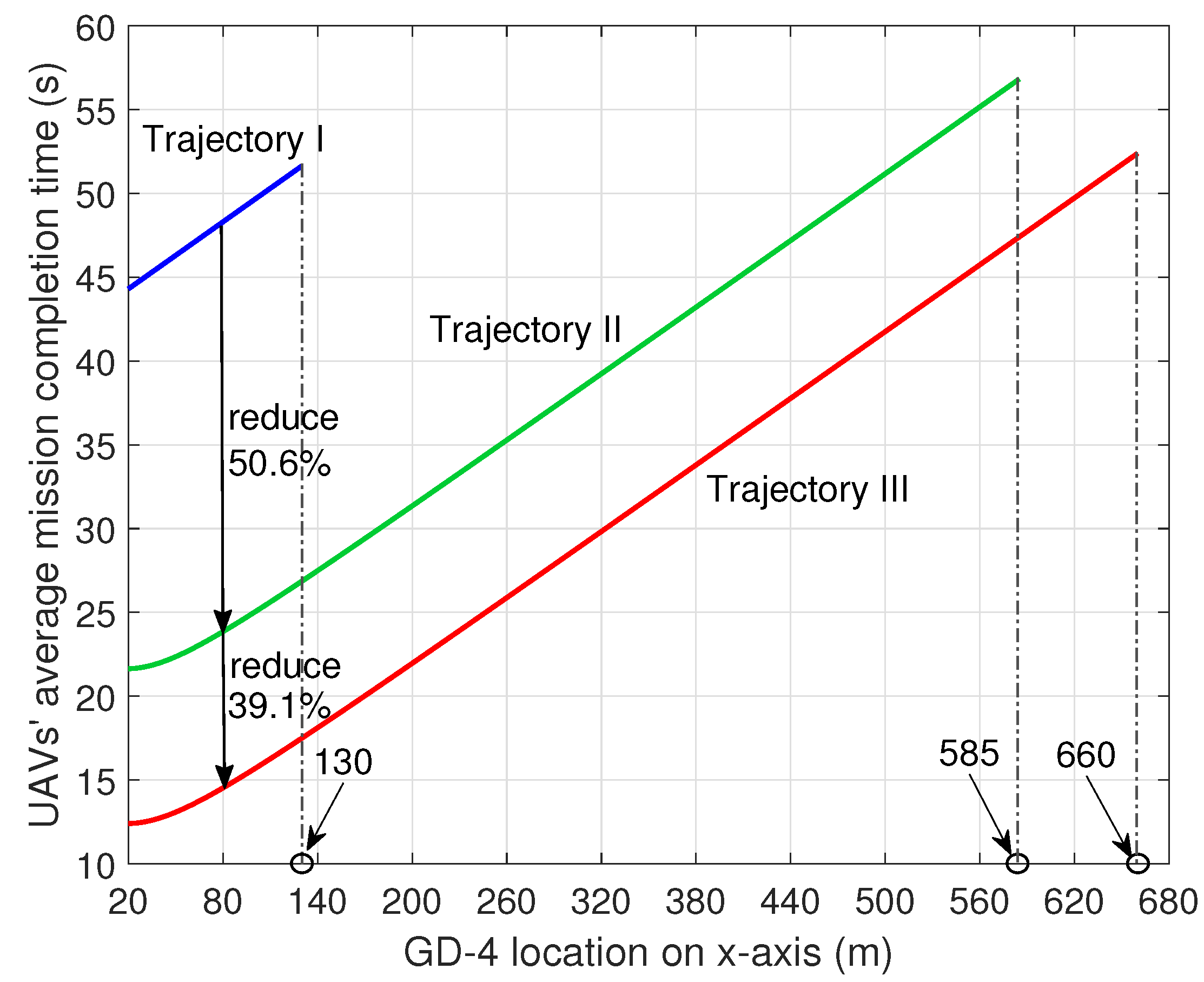
- No cooperation with Trajectory I: the three UAVs operate individually, where each of the three UAVs flies directly to GD-1, the cluster of GD-2 and GD-3, and GD-4, respectively, and hovers above the GD (or the center of the cluster) to serve it.
- Full cooperation with Trajectory II: all three UAVs operate cooperatively as a team, where according to the GDs’ energy and communication latency tolerances, the UAVs sequentially visit GD-1, the cluster of GD-2 and GD-3, and GD-4 to serve them.
- Partial cooperation under UAV clustering with Trajectory III: the UAVs are grouped into two clusters, with a single UAV-1 in one cluster, and UAV-2 and UAV-3 working cooperatively in the other cluster. The former and the latter UAV clusters separately fly to GD-1 and the cluster of GD-2 and GD-3 to serve them, and then join at GD-4’s E-zone edge (i.e., GD-4’s x-location minus its E-zone radius on x-axis) for cooperative WET by flying to GD-4.
5. Conclusions and Future Work
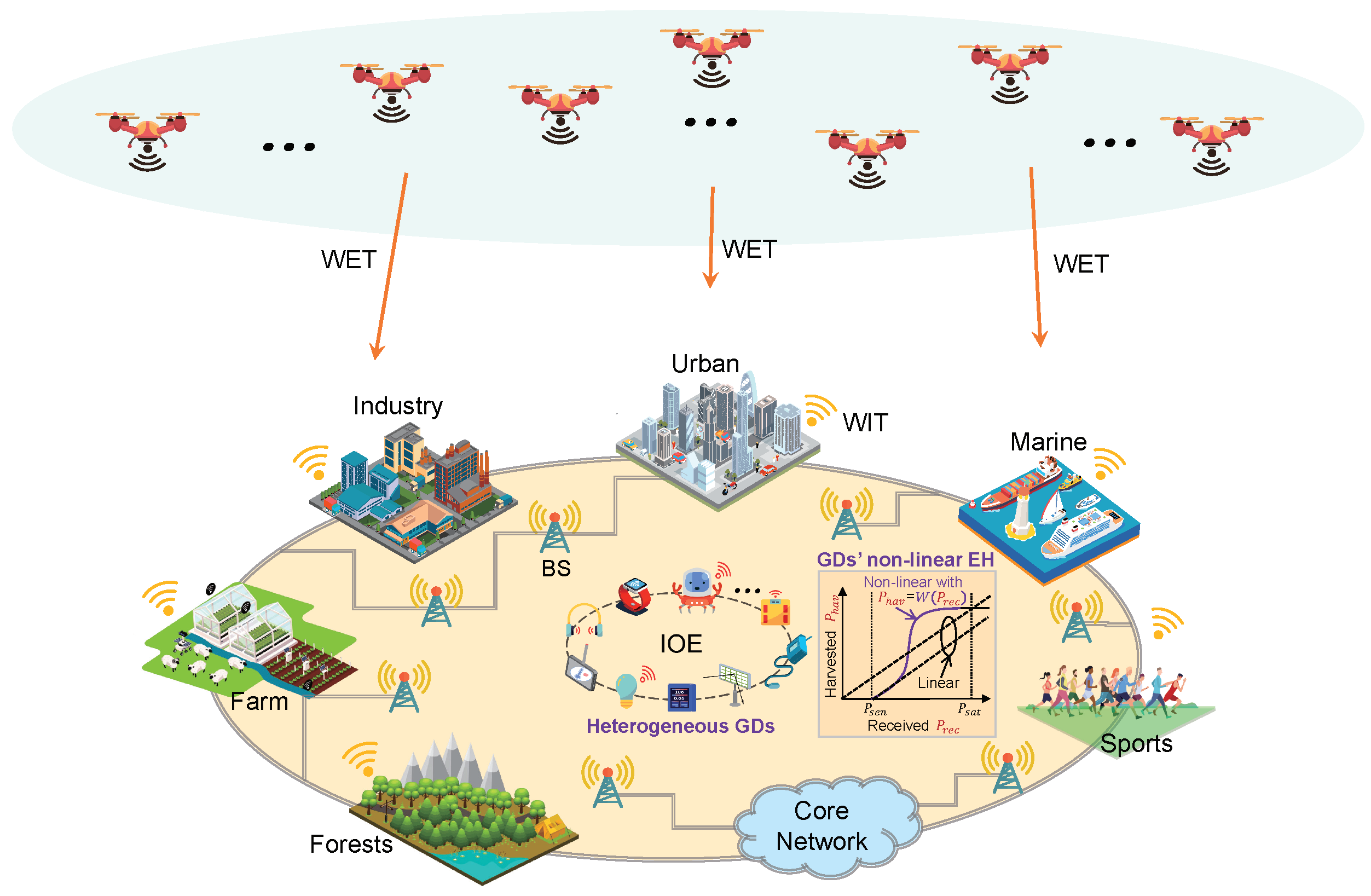
- Efficient retrieval of the demands of GDs: A complete and timely retrieval of all the GDs’ different non-linear EH properties and energy demands is essential for the UAVs to properly implement our proposed adaptive trajectory and hierarchical WET in Section 4. It may be difficult to reliably establish direct GD-to-UAV connections in the complex IoE scenario. In this case, a more promising method is to employ the cellular-connected UAVs, where the UAVs are integrated as cellular users and are reliably served by the BSs [7]. As shown in Figure 1, the GDs’ EH properties and demand information at any required locations can be efficiently obtained by the UAVs via these GDs’ associated BSs connected by the core network.
- Expanding E-zones for GDs: Besides exploiting the multi-UAV cooperation as shown in Section 3.3, we can also employ the intelligent reflected surface (IRS) to expand the E-zones for the GDs for more efficient UAV-aided WET, where the A2G channel path loss can be largely reduced via the assistance from IRS [31]. For a UAV with multiple antennas, the active and inactive energy beamforming at the UAV and the IRS can be jointly designed along the UAV’s energy-demand trajectory, to efficiently improve the UAVs’ WET performance for serving multiple GDs.
- Intelligent UAV swarming for cost-effective WET: While multi-UAV cooperation can boost the efficiency of the UAV-aided WET, repeating UAV interactions is required to assure their synchronous moving and transmissions. This can increase the UAVs’ operational overhead and/or cost substantially. By allowing the UAVs to automatically move and transmit under a pre-defined proactive set of operation rules, the method of intelligent UAV swarming can be alternatively adopted [32]. However, it is still challenging to determine the UAVs’ automatic operation rules in the complex IoE scenario. More research efforts are expected to develop efficient UAV swarming systems for cost-effective WET.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2020, 34, 134C–142C. [Google Scholar] [CrossRef]
- Liu, J.; Peng, J.; Xu, W.; Liang, W.; Liu, T.; Peng, X.; Xu, Z.; Li, Z.; Jia, X. Maximizing sensor lifetime via multi-node partial-charging on sensors. IEEE Trans. Mobile Comp. 2022, forthcoming. [Google Scholar] [CrossRef]
- Che, Y.L.; Duan, L.; Zhang, R. Spatial throughput maximization of wireless powered communication networks. IEEE J. Sel. Areas Commun. 2015, 33, 1534–1548. [Google Scholar] [CrossRef]
- Wang, L.; Che, Y.L.; Wu, K.; Duan, L. Multiple access mmWave design for UAV-aided 5G communications. IEEE Wirel. Commun. 2019, 26, 64–71. [Google Scholar] [CrossRef]
- Xu, W.; Sun, Y.; Zou, R.; Liang, W.; Xia, Q.; Shan, F.; Wang, T.; Jia, X.; Li, Z. Throughput maximization of UAV networks. IEEE/ACM Trans. Netw. 2021, 30, 881–895. [Google Scholar] [CrossRef]
- Shen, Q.; Peng, J.; Xu, W.; Sun, Y.; Liang, W.; Chen, L.; Zhao, Q.; Jia, X. Fair communications in UAV networks for rescue applications. IEEE Internet Things J. 2023, forthcoming. [Google Scholar] [CrossRef]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-connected UAV: Potential, challenges and promising technologies. IEEE Wirel. Commun. 2019, 26, 120–127. [Google Scholar] [CrossRef]
- Chen, S.; Shu, Y.; Yu, B.; Liang, C.; Shi, Z.; Chen, J. Demo: Mobile wireless charging and sensing by drones. In Proceedings of the 14th Annual International Conference on Mobile Systems, Applications and Services Companion—MobiSys Companion, New York, NY, USA, 25–30 June 2016; p. 99. [Google Scholar]
- Xie, L.; Cao, X.; Xu, J.; Zhang, R. UAV-enabled wireless power transfer: A tutorial overview. IEEE Trans. Green Commun. Netw. 2021, 5, 2042–2064. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Che, Y.L.; Lai, Y.; Luo, S.; Wu, K.; Duan, L. UAV-aided information and energy transmissions for cognitive and sustainable 5G networks. IEEE Trans. Wirel. Commun. 2021, 20, 1668–1683. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, J.; Zhang, R. Energy minimization for wireless communication with rotary-wing UAV. IEEE Trans. Wirel. Commun. 2019, 18, 2329–2345. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Che, Y.L.; Luo, S.; Wu, K.; Leung, V.C.M. Multi-agent graph reinforcement learning based on-demand wireless energy transferin multi-UAV-aided IoT network. arXiv 2023, arXiv:2307.14626. [Google Scholar]
- Yuan, X.; Yang, T.; Hu, Y.; Xu, J.; Schmeink, A. Trajectory design for UAV-enabled multiuser wireless power transfer with nonlinear energy harvesting. IEEE Trans. Wirel. Commun. 2021, 20, 1105–1121. [Google Scholar]
- Oubbati, O.S.; Atiquzzaman, M.; Lim, H.; Rachedi, A.; Lakas, A. Synchronizing UAV teams for timely data collection and energy transfer by deep reinforcement learning. IEEE Trans. Veh. Technol. 2022, 71, 6682–6697. [Google Scholar]
- Oubbati, O.S.; Lakas, A.; Guizani, M. Multiagent deep reinforcement learning for wireless-powered UAV networks. IEEE Internet Things J. 2022, 9, 16044–16059. [Google Scholar]
- Peng, H.; Wang, L.C. Energy Harvesting Reconfigurable Intelligent Surface for UAV Based on Robust Deep Reinforcement Learning. IEEE Trans. Wirel. Commun. 2023, forthcoming. [Google Scholar]
- Alevizos, P.N.; Bletsas, A. Sensitive and nonlinear far-field RF energy harvesting in wireless communications. IEEE Trans. Commun. 2018, 17, 3670–3685. [Google Scholar] [CrossRef]
- PowerCast Module. Available online: http://www.mouser.com/ds/2/329/P2110B-Datasheet-Rev-3-1091766.pdf (accessed on 8 July 2020).
- Singh, S.K.; Agrawal, K.; Singh, K.; Li, C.P.; Alouini, M.S. NOMA Enhanced UAV-Assisted Communication System with Nonlinear Energy Harvesting. IEEE Open J. Commun. Soc. 2022, 3, 936–957. [Google Scholar]
- Liu, Y.; Dai, H.N.; Wang, Q.; Imran, M.; Guizani, N. Wireless Powering Internet of Things with UAVs: Challenges and Opportunities. IEEE Net. 2022, 36, 146–152. [Google Scholar] [CrossRef]
- Lin, J.; Huang, L.; Zhang, H.; Yang, X.; Zhao, P. A novel lyapunov based dynamic resource allocation for UAVs-assisted edge computing. Comp. Netw. 2022, 205, 108710. [Google Scholar]
- Shi, T.; Qin, K.; Luo, G. Completion Time Optimization in UAV-Relaying-Assisted MEC Networks with Moving Users. IEEE Trans. Consumer Electr. 2023, forthcoming. [Google Scholar]
- Jia, H.; Wang, Y.; Chen, Y.; Liu, M.; Li, Z. Sum Rate Maximization for Multi-UAV Enabled Space-Air-Ground Wireless Powered Communication Networks. In Proceedings of the IEEE Wireless Communications and Networking Conference Workshops, Nanjing, China, 29 March 2021. [Google Scholar]
- Yang, H.; Ye, Y.; Chu, X.; Sun, S. Energy Efficiency Maximization for UAV-Enabled Hybrid Backscatter-Harvest-Then-Transmit Communications. IEEE Trans. Wirel. Commun. 2022, 21, 2876–2891. [Google Scholar] [CrossRef]
- Xie, L.; Xu, J.; Zhang, R. Throughput maximization for UAV-enabled wireless powered communication networks. IEEE Internet Things J. 2019, 6, 1690–1703. [Google Scholar] [CrossRef]
- Pan, H.; Liu, Y.; Sun, G.; Fan, J.; Liang, S.; Yuen, C. Joint Power and 3D Trajectory Optimization for UAV-Enabled Wireless Powered Communication Networks with Obstacles. IEEE Trans. Commun. 2023, 71, 2364–2380. [Google Scholar] [CrossRef]
- Tang, Q.; Yang, Y.; Liu, L.; Yang, K. Minimal Throughput Maximization of UAV-enabled Wireless Powered Communication Network in Cuboid Building Perimeter Scenario. IEEE Trans. Net. Serv. Manag. 2023, forthcoming. [Google Scholar] [CrossRef]
- Kartalopoulos, S.V. Free-Space Optical Networks for Ultra-Broad Band Services; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Che, Y.L.; Long, W.; Luo, S.; Wu, K.; Zhang, R. Energy-efficient UAV multicasting with simultaneous FSO backhaul and power transfer. IEEE Wirel. Commun. Lett. 2021, 10, 1537–1541. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Joint active and passive beamforming optimization for intelligent reflecting surface assisted SWIPT under QoS constraints. IEEE J. Sel. Areas Commun. 2020, 38, 1735–1748. [Google Scholar] [CrossRef]
- Hu, F.; Ou, D.; Huang, X. UAV Swarm Networks: Models, Protocols, and Systems; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Che, Y.; Zhao, Z.; Luo, S.; Wu, K.; Duan, L.; Leung, V.C.M. UAV-Aided Wireless Energy Transfer for Sustaining Internet of Everything in 6G. Drones 2023, 7, 628. https://doi.org/10.3390/drones7100628
Che Y, Zhao Z, Luo S, Wu K, Duan L, Leung VCM. UAV-Aided Wireless Energy Transfer for Sustaining Internet of Everything in 6G. Drones. 2023; 7(10):628. https://doi.org/10.3390/drones7100628
Chicago/Turabian StyleChe, Yueling, Zeyu Zhao, Sheng Luo, Kaishun Wu, Lingjie Duan, and Victor C. M. Leung. 2023. "UAV-Aided Wireless Energy Transfer for Sustaining Internet of Everything in 6G" Drones 7, no. 10: 628. https://doi.org/10.3390/drones7100628
APA StyleChe, Y., Zhao, Z., Luo, S., Wu, K., Duan, L., & Leung, V. C. M. (2023). UAV-Aided Wireless Energy Transfer for Sustaining Internet of Everything in 6G. Drones, 7(10), 628. https://doi.org/10.3390/drones7100628