
Self-Calibration of UAV Thermal Imagery Using Gradient Descent Algorithm




Abstract
:1. Introduction
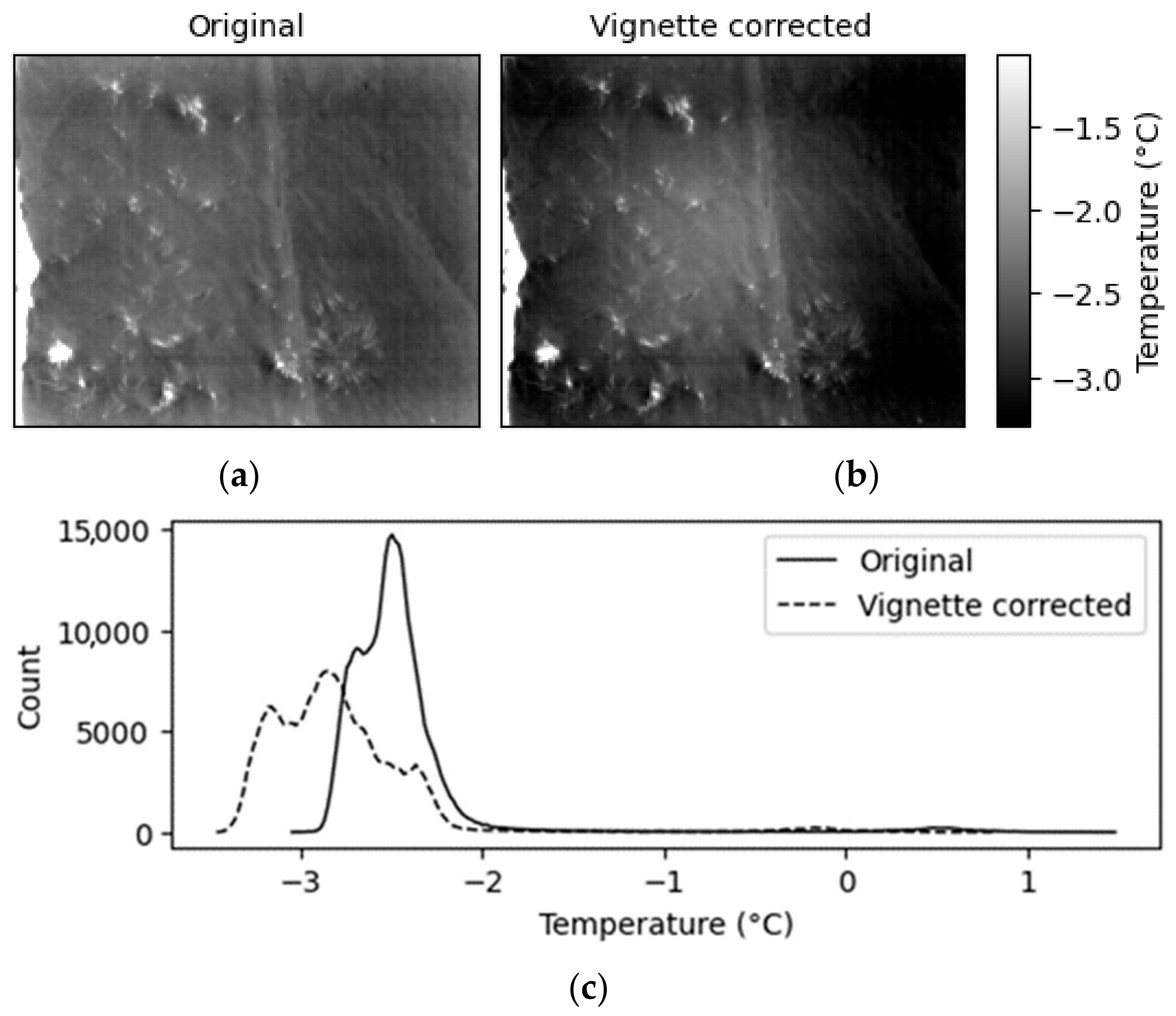
- Devignetting—reduction of temperature pixel bias within each single picture caused by non-uniform temperature of the thermal sensor;
- Georeferencing—assigning the consistent coordinate system for the whole picture set based on EXIF (exchangeable image file format) metadata and characteristic keypoints identified on each picture;
- Inter-image temperature consistency optimisation—reduction of average temperature difference in the same areas recorded on different pictures;
- Landmark referencing—minimising the temperature offset of the whole thermal mosaic based on ground-based reference points.
2. Materials and Methods
2.1. Data
- Area around about 500 m of the Kocinka stream stretch near Grodzisko village (50.8715 N, 18.9661 E);
- Area around about 350 m of the Kocinka stream stretch near Rybna village (50.9371 N, 19.1134 E);
- Area around about 160 m of the Sudół stream stretch near Kraków city (50.0999 N, 19.9027 E).
2.2. Algorithm
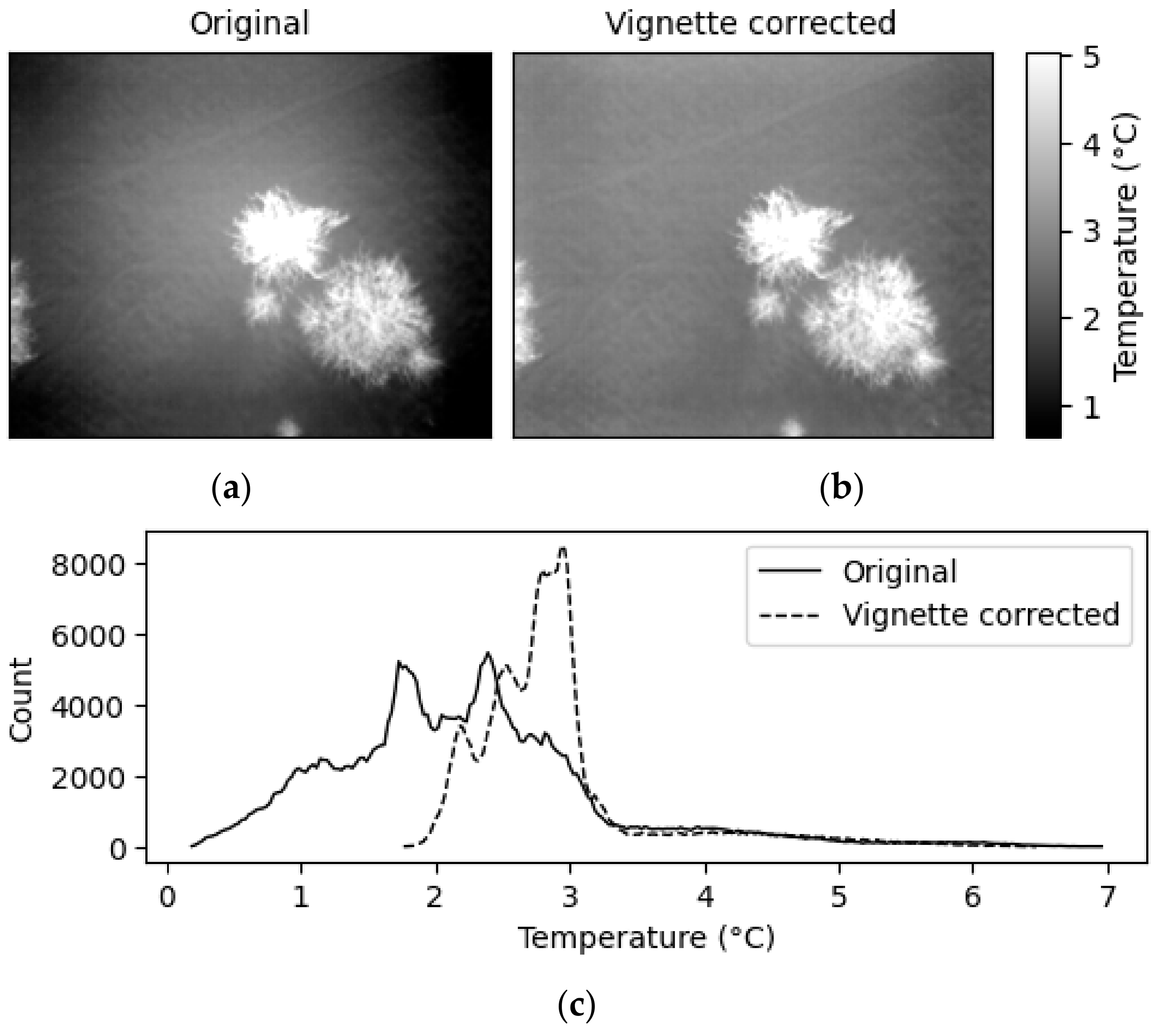
2.2.1. Devignetting
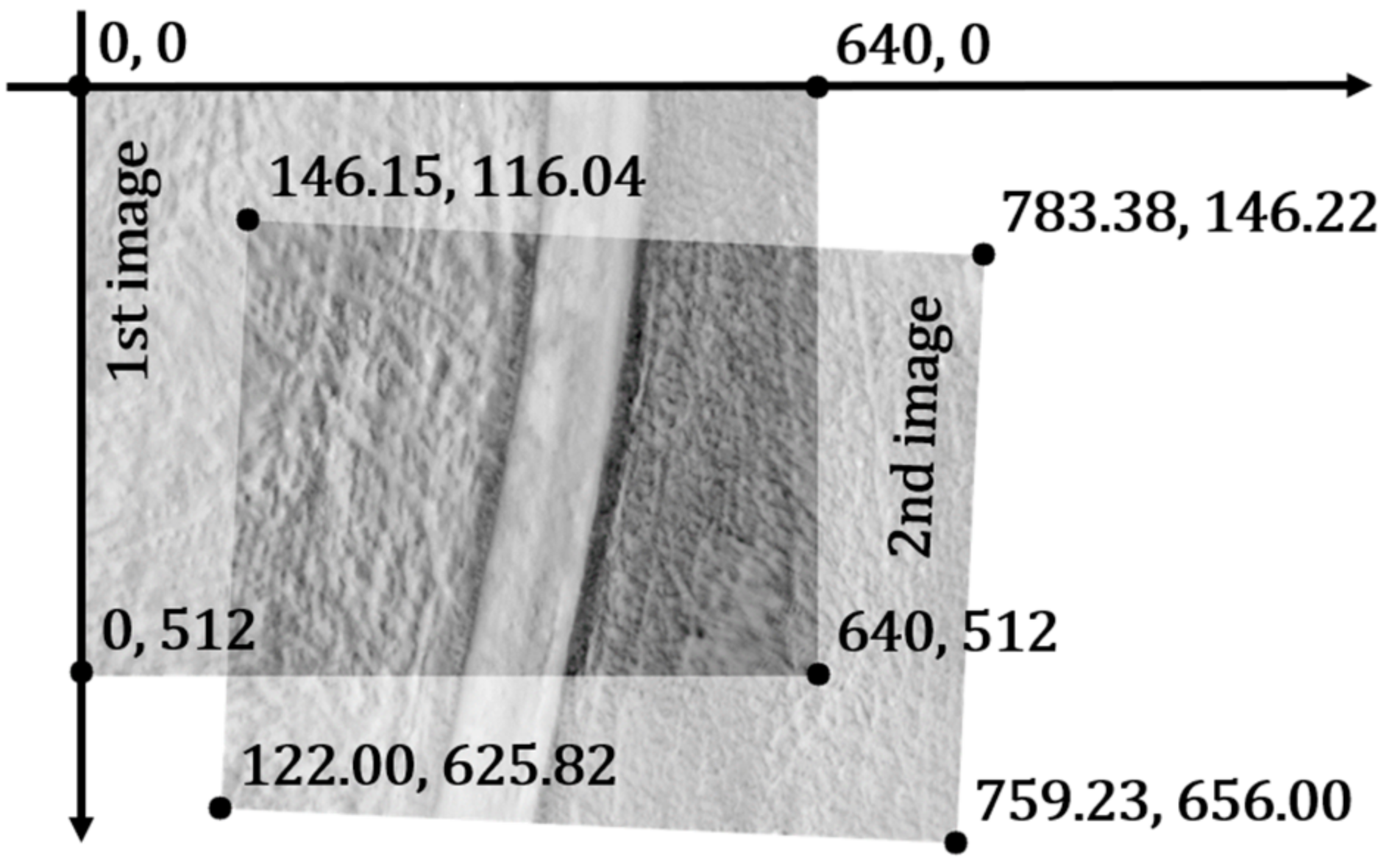
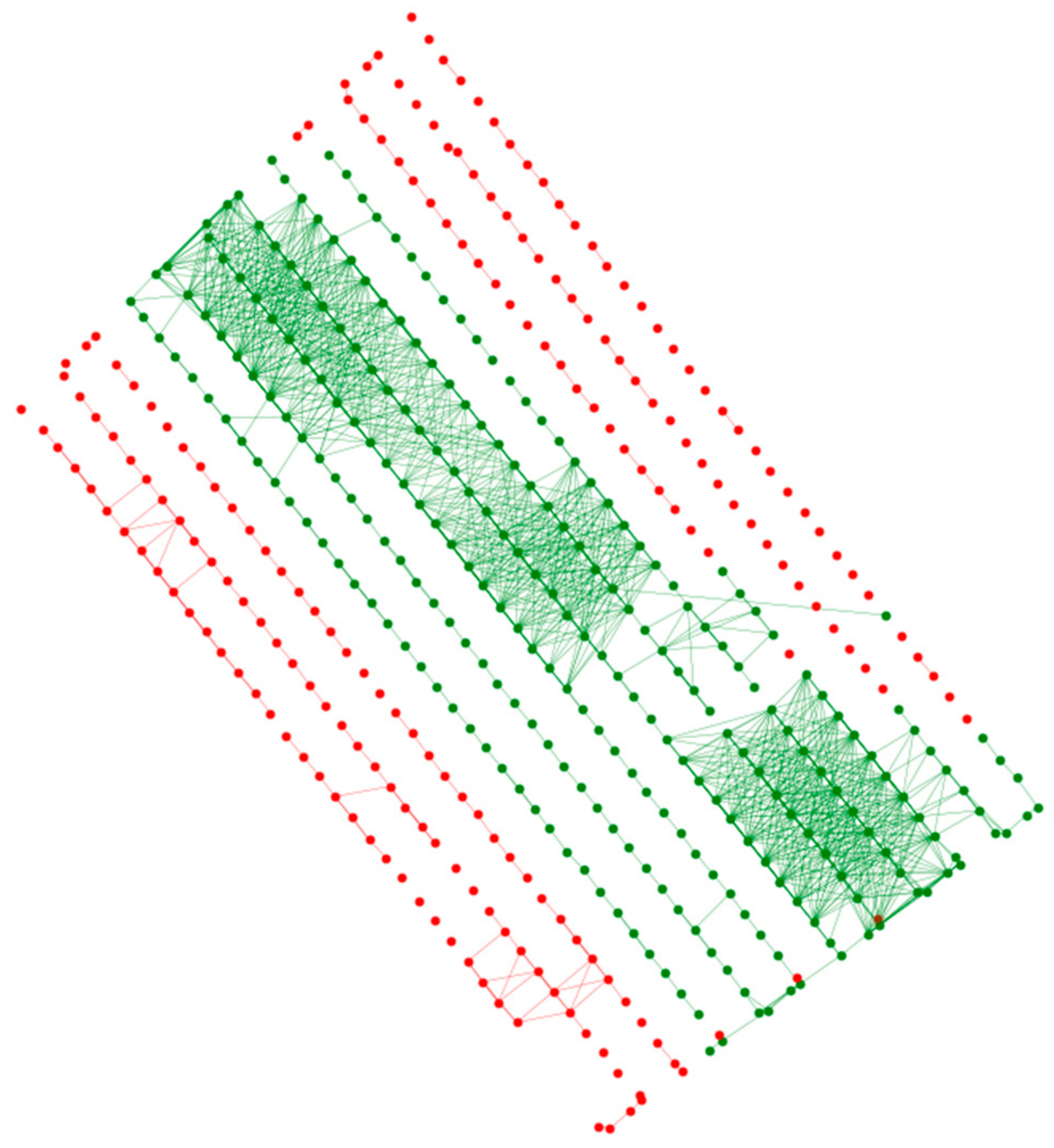
2.2.2. Georeferencing
- —relative transformation matrix between the 2nd image and 1st image pixel coordinate systems;
- —coordinates of corner point expressed in the 2nd image pixel coordinate system;
- —coordinates of the same point expressed in the 1st image pixel coordinate system.
- —relative transformation matrix between the 2nd image and 1st image pixel coordinate systems after georeference optimisation;
- —coordinates of a point expressed in the 2nd image pixel coordinate system;
- —coordinates of the same point expressed in the 1st image pixel coordinate system after georeference optimisation.
- —number of pairs;
- —point of the j-th corner of the i-th pair of the 2nd image expressed in the 1st image pixel coordinate system estimated from pairs alignment;
- —point of the j-th corner of the i-th pair of the 2nd image expressed in the 1st image pixel coordinate system estimated using relative transformation recovered from absolute geographic transformations tuned during optimisation.
- —number of images;
- —point of centroid of the i-th image obtained from EXIF data expressed in the geographic coordinate system;
- —point of centroid of the i-th image obtained from absolute geographic transformation tuned during optimisation.
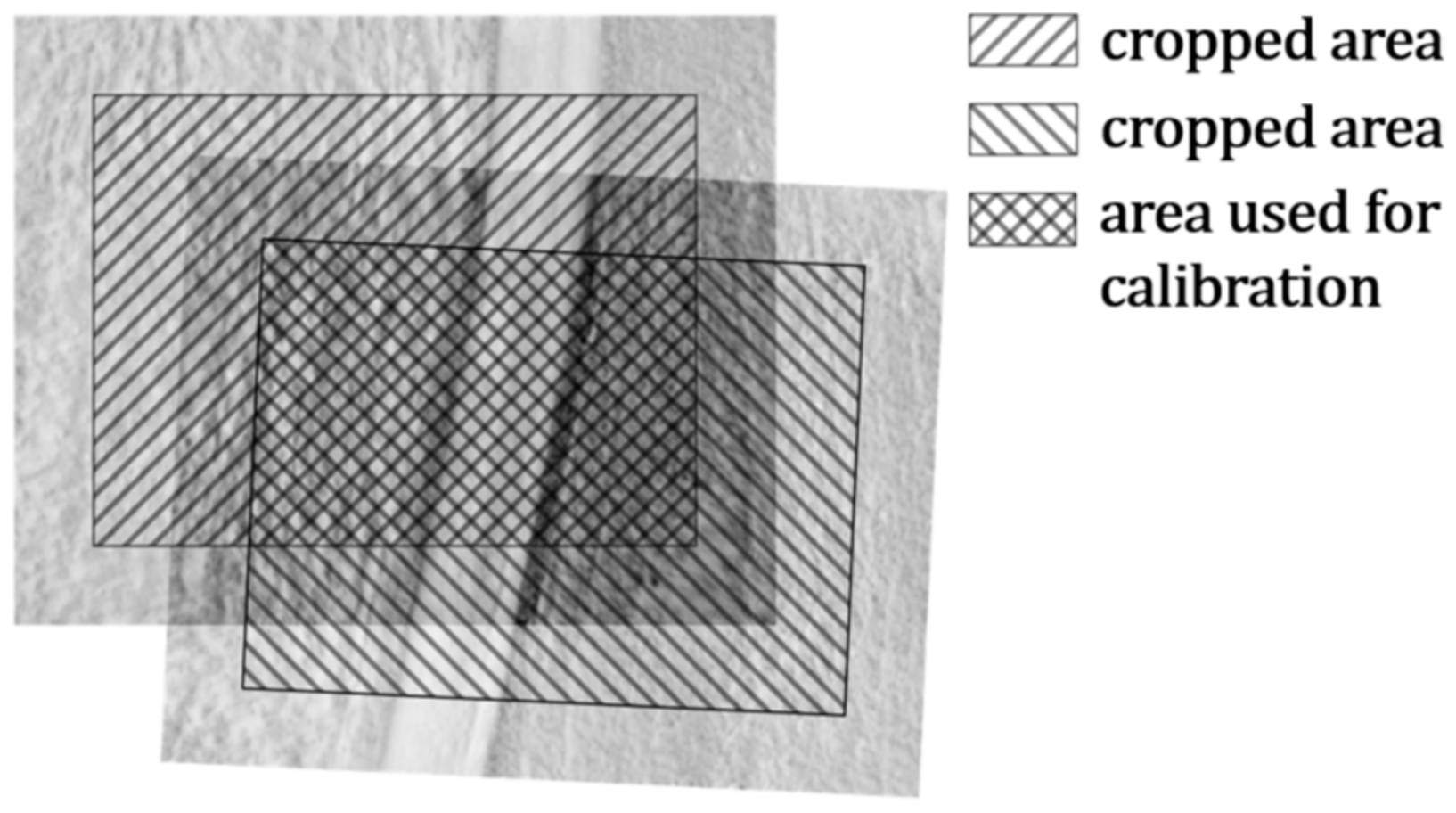
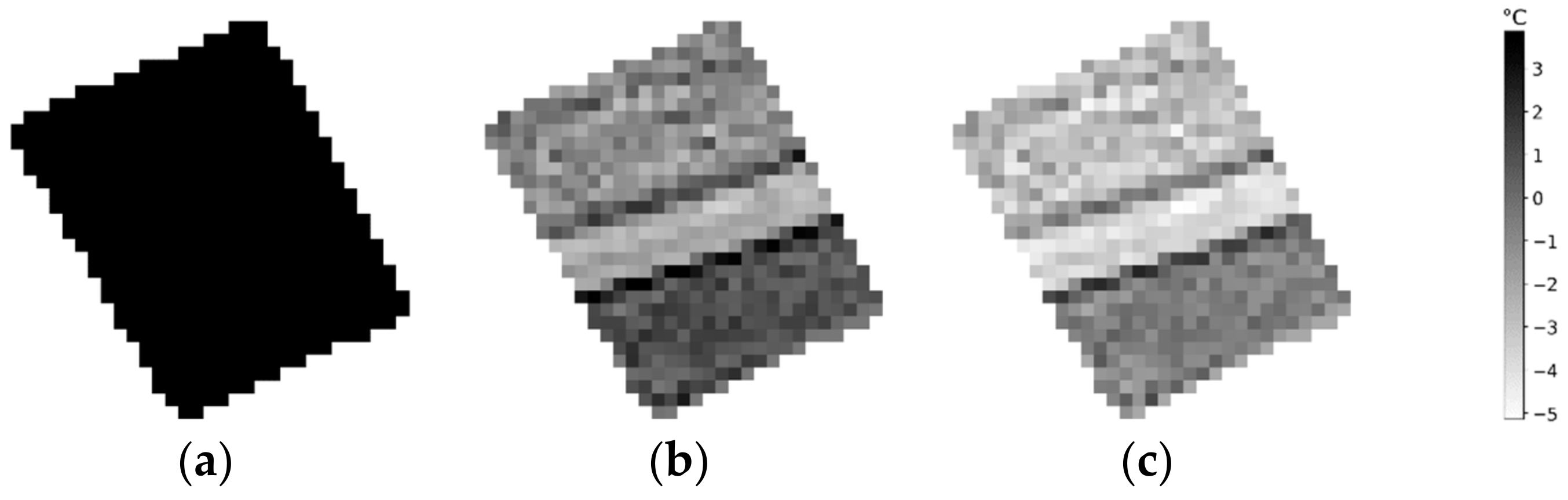
2.2.3. Inter-Image Temperature Consistency Optimisation
- —temperature value with applied calibration;
- —temperature value before calibration.
- —number of pairs;
- —calibrated temperature value of the pixel with the coordinates (j,k) of the 1st image in the i-th pair;
- —calibrated temperature value of the pixel with the coordinates (j,k) of the 2nd image in the i-th pair.
- —mean temperature value of uncalibrated images;
- —mean temperature value of calibrated images.
2.3. Landmark Referencing
3. Results and Discussion
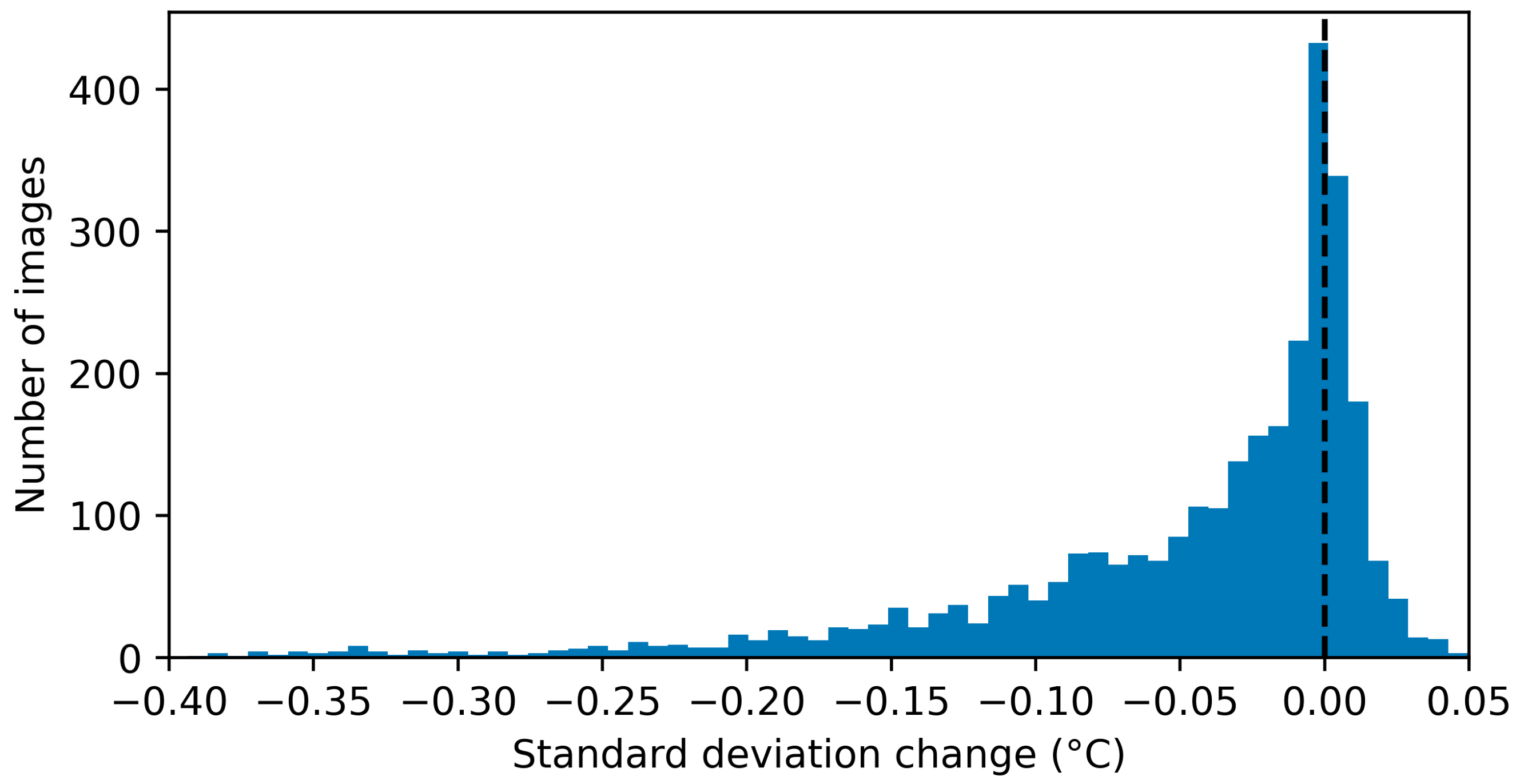
3.1. Devignetting
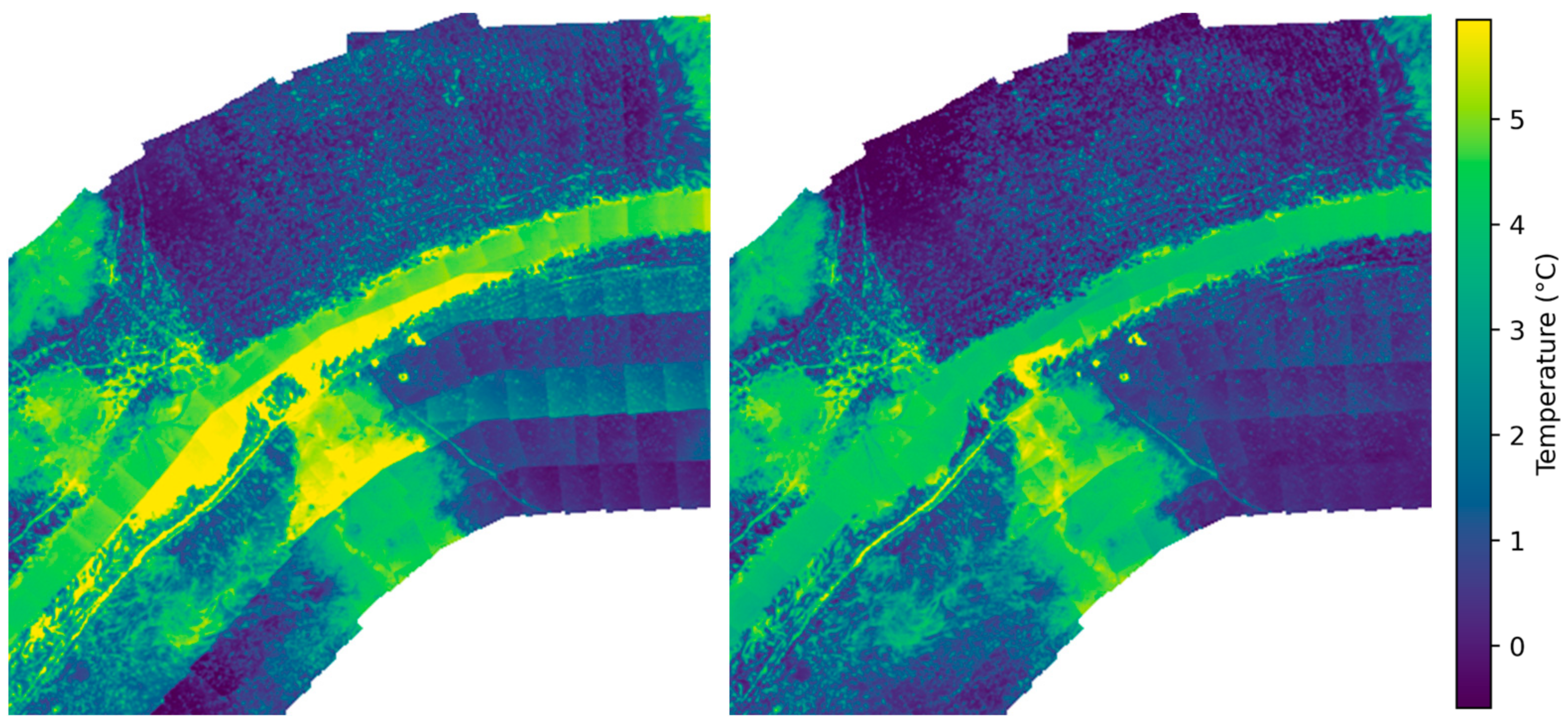
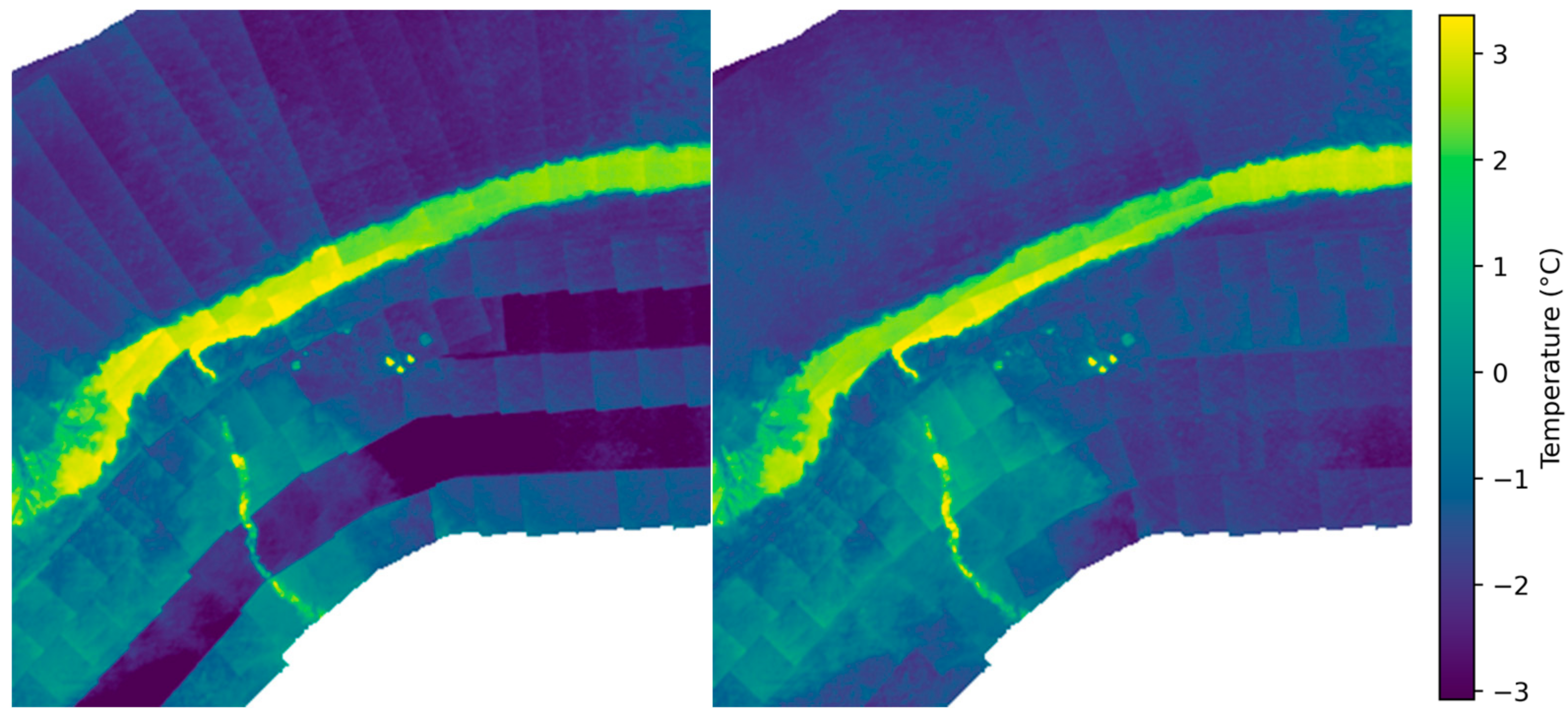
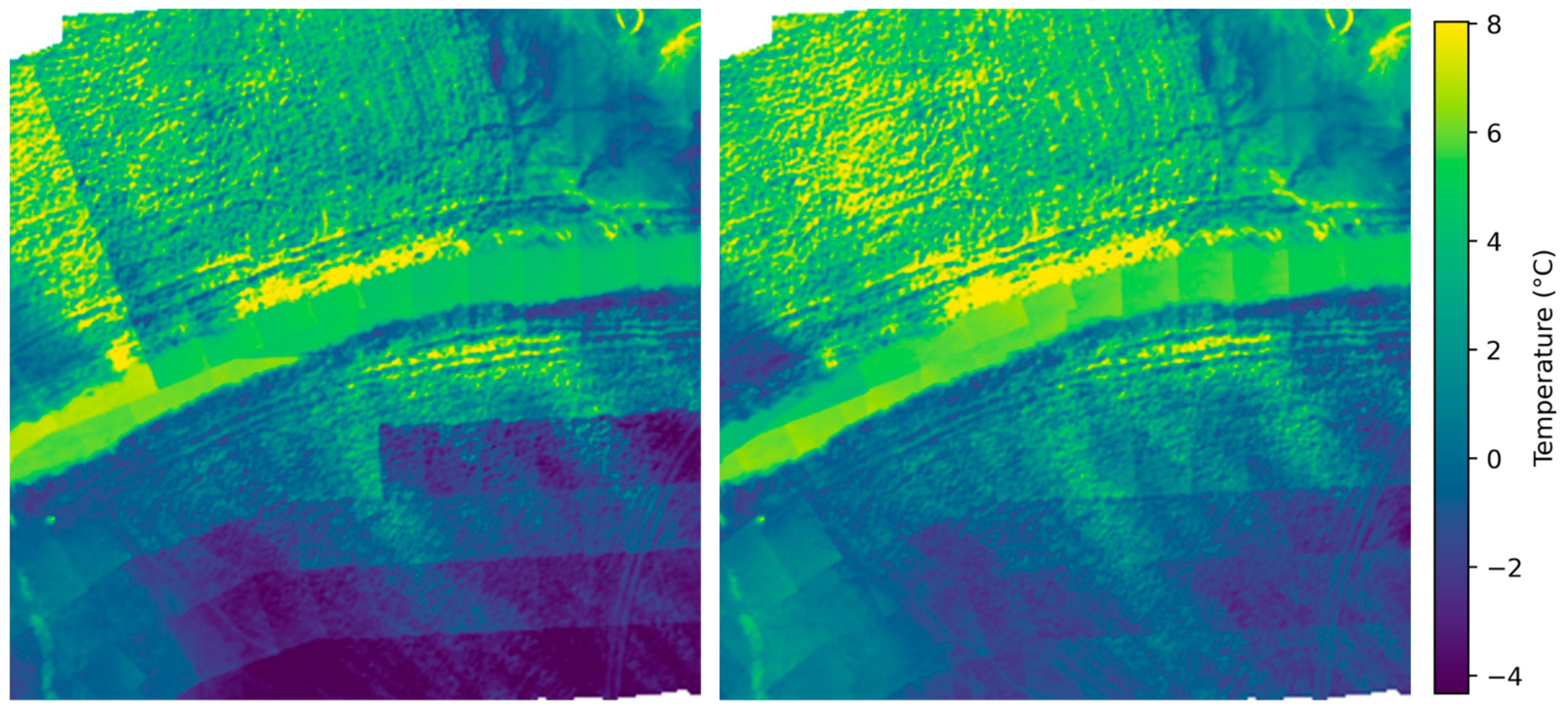
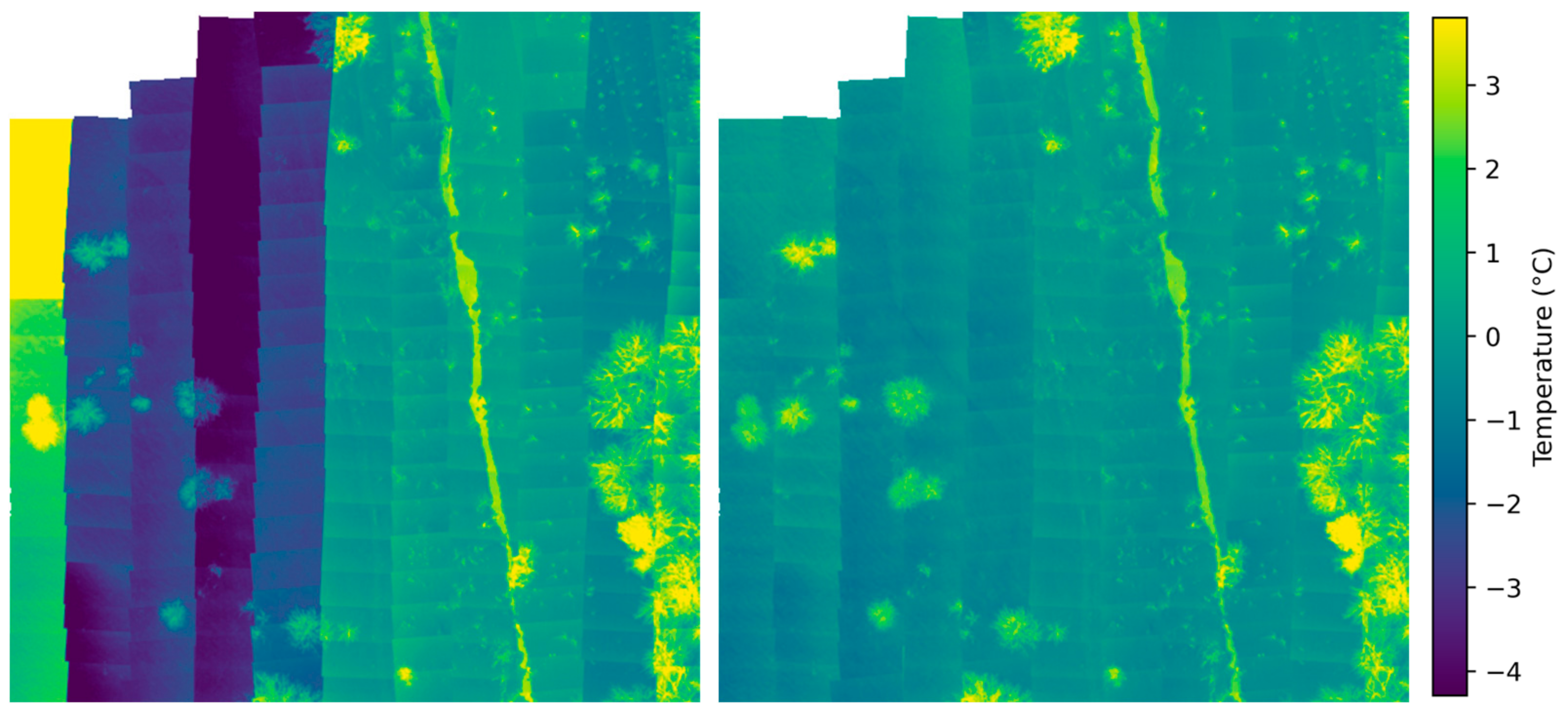
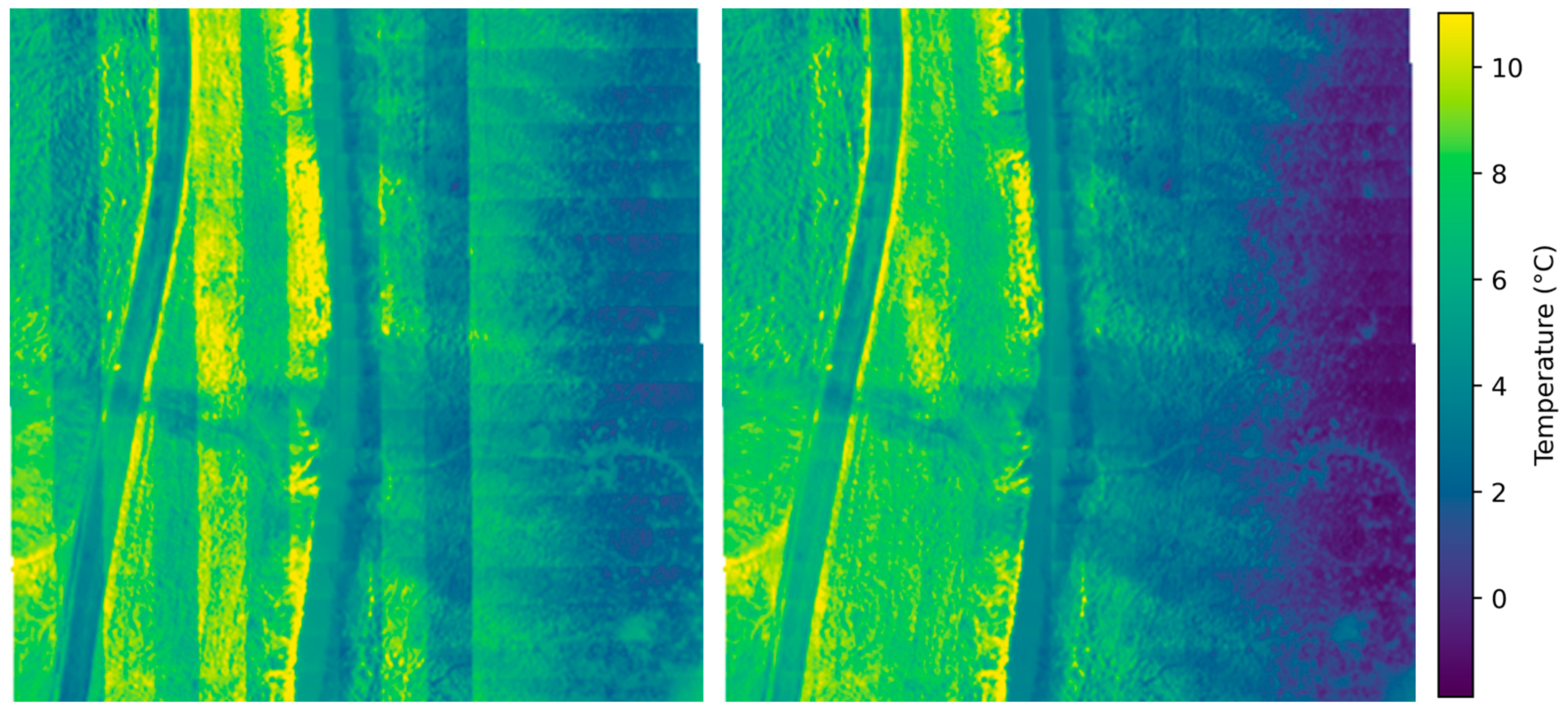
3.2. Visual Assessment
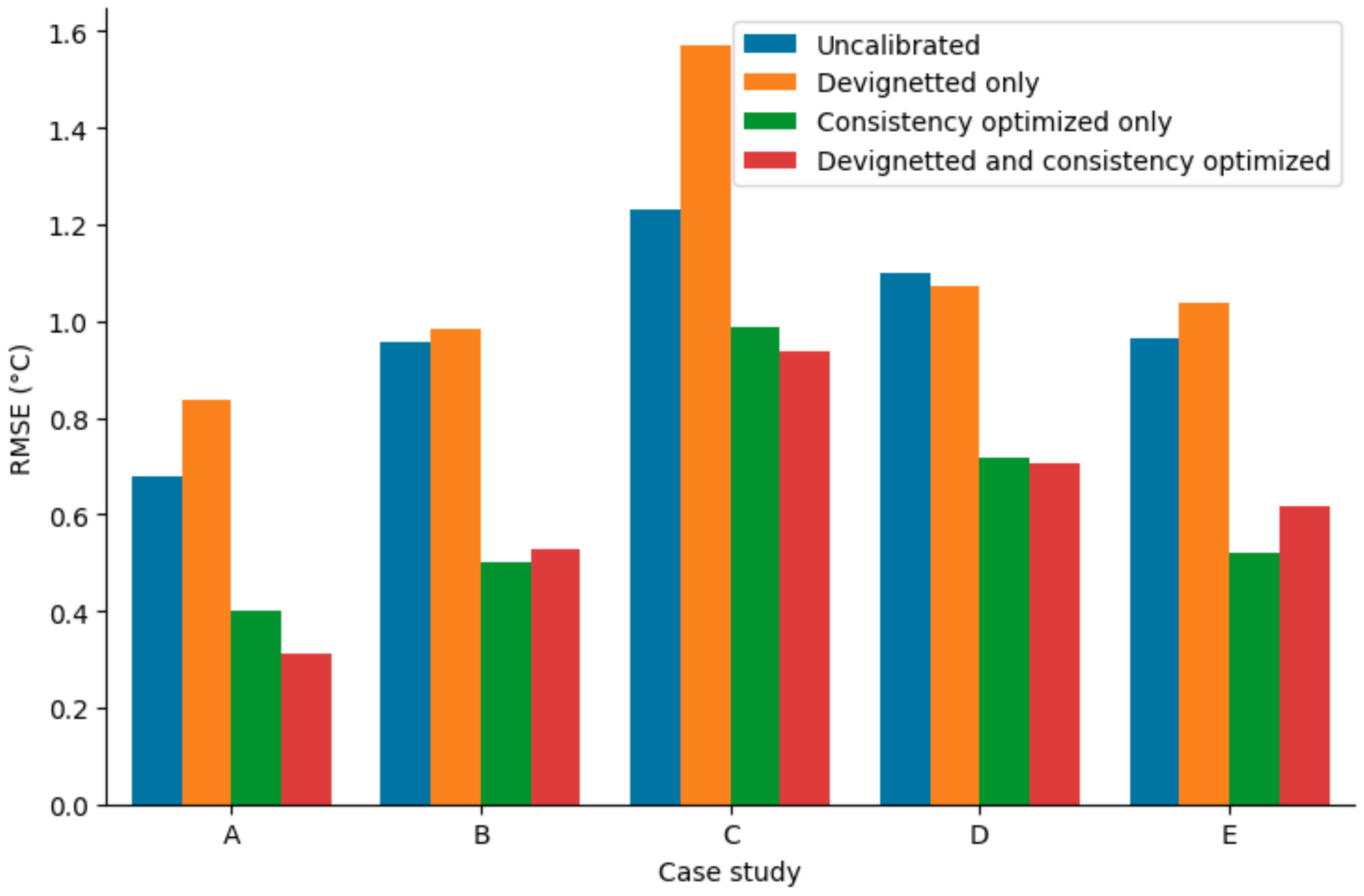
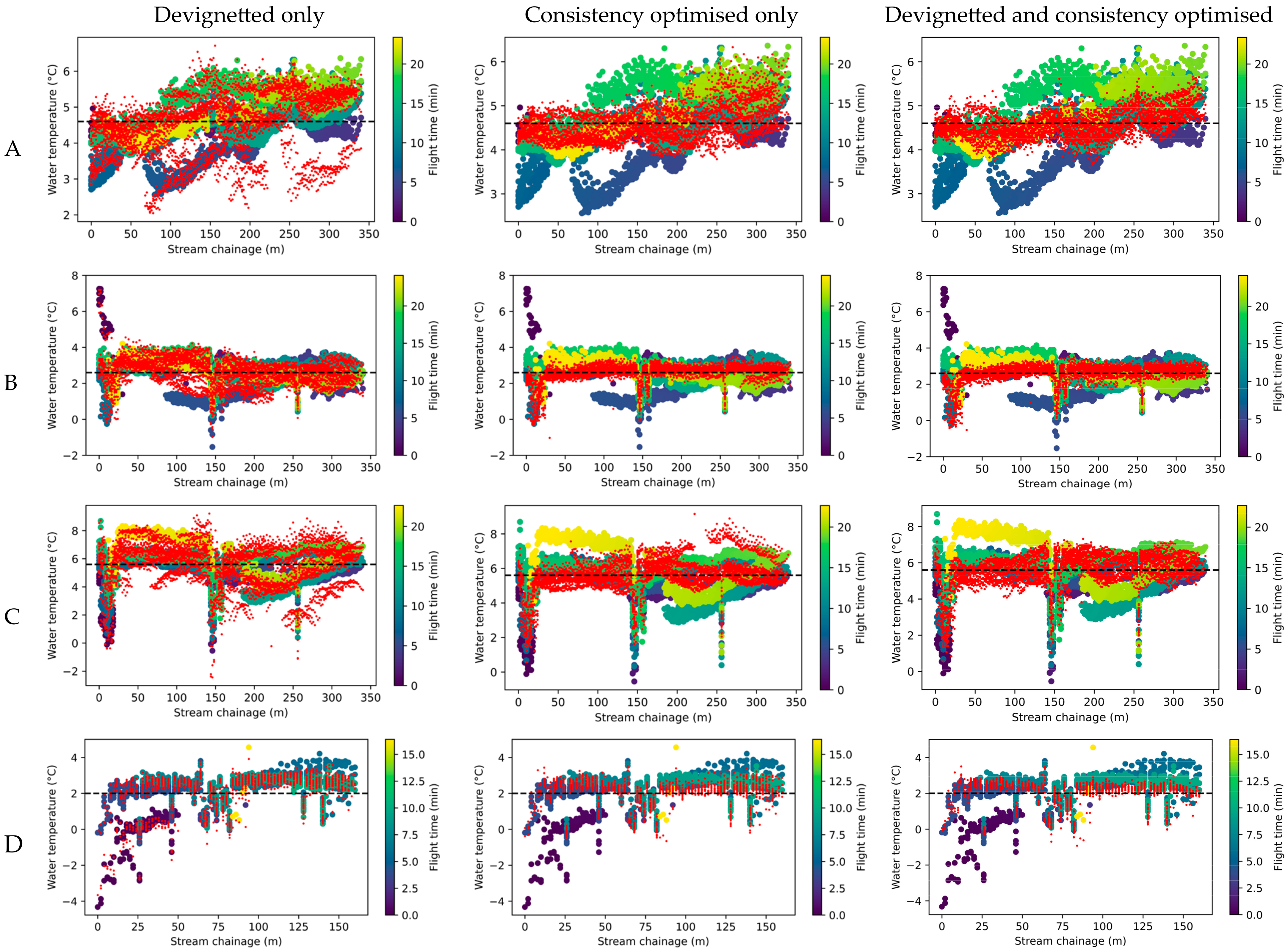
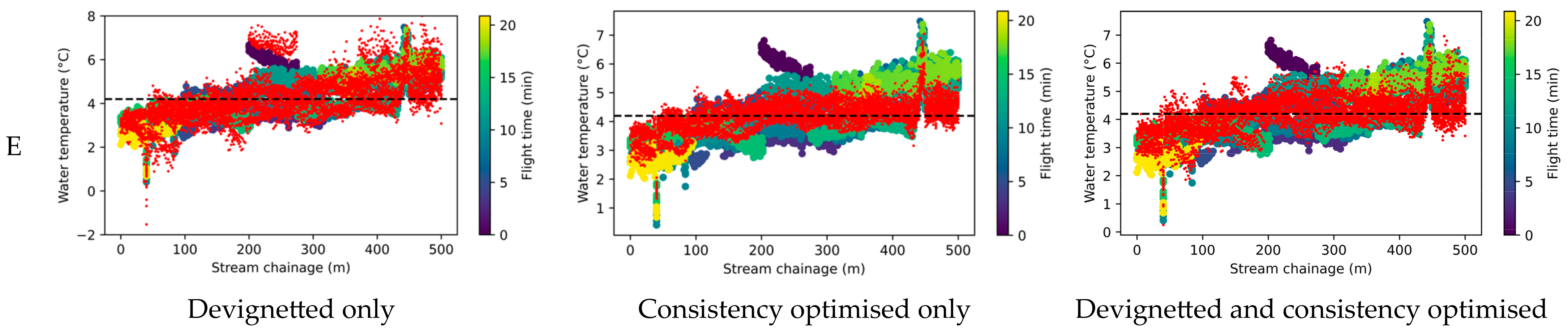
3.3. Waterbody Temperature
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Conversion Notebook
Appendix A.2. Georeferencing Notebook

Appendix A.3. Calibration Notebook
References
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring From an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Lagüela, S.; Díaz−Vilariño, L.; Roca, D.; Lorenzo, H. Aerial Thermography from Low-Cost UAV for the Generation of Thermographic Digital Terrain Models. Opto-Electron. Rev. 2015, 23, 76–82. [Google Scholar] [CrossRef]
- Messina, G.; Peña, J.M.; Vizzari, M.; Modica, G. A Comparison of UAV and Satellites Multispectral Imagery in Monitoring Onion Crop. An Application in the ‘Cipolla Rossa Di Tropea’ (Italy). Remote Sens. 2020, 12, 3424. [Google Scholar] [CrossRef]
- Dugdale, S.J. A Practitioner’s Guide to Thermal Infrared Remote Sensing of Rivers and Streams: Recent Advances, Precautions and Considerations. WIREs Water 2016, 3, 251–268. [Google Scholar] [CrossRef]
- Dugdale, S.J.; Kelleher, C.A.; Malcolm, I.A.; Caldwell, S.; Hannah, D.M. Assessing the Potential of Drone-based Thermal Infrared Imagery for Quantifying River Temperature Heterogeneity. Hydrol. Process. 2019, 33, 1152–1163. [Google Scholar] [CrossRef]
- O’Sullivan, A.M.; Linnansaari, T.; Curry, R.A. Ice Cover Exists: A Quick Method to Delineate Groundwater Inputs in Running Waters for Cold and Temperate Regions. Hydrol. Process. 2019, 33, 3297–3309. [Google Scholar] [CrossRef]
- Aragon, B.; Phinn, S.R.; Johansen, K.; Parkes, S.; Malbeteau, Y.; Al-Mashharawi, S.; Alamoudi, T.S.; Andrade, C.F.; Turner, D.; Lucieer, A.; et al. A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments. Sensors 2020, 20, 3316. [Google Scholar] [CrossRef] [PubMed]
- Kelly, J.; Kljun, N.; Olsson, P.-O.; Mihai, L.; Liljeblad, B.; Weslien, P.; Klemedtsson, L.; Eklundh, L. Challenges and Best Practices for Deriving Temperature Data from an Uncalibrated UAV Thermal Infrared Camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef]
- Kusnierek, K.; Korsaeth, A. Challenges in Using an Analog Uncooled Microbolometer Thermal Camera to Measure Crop Temperature. Int. J. Agric. Biol. Eng. 2014, 7, 60–74. [Google Scholar]
- Yuan, W.; Hua, W. A Case Study of Vignetting Nonuniformity in UAV-Based Uncooled Thermal Cameras. Drones 2022, 6, 394. [Google Scholar] [CrossRef]
- Ribeiro-Gomes, K.; Hernández-López, D.; Ortega, J.; Ballesteros, R.; Poblete, T.; Moreno, M. Uncooled Thermal Camera Calibration and Optimization of the Photogrammetry Process for UAV Applications in Agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef] [PubMed]
- Lin, D.; Maas, H.-G.; Westfeld, P.; Budzier, H.; Gerlach, G. An Advanced Radiometric Calibration Approach for Uncooled Thermal Cameras. Photogramm. Rec. 2018, 33, 30–48. [Google Scholar] [CrossRef]
- Sampath, A.; Moe, D.; Christopherson, J. Two methods for self calibration of digital camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 261–266. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Pérez-Porras, F.J.; Larriva, J.E.M.D.; Frau, C.M.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P.; García-Ferrer, A. Drift Correction of Lightweight Microbolometer Thermal Sensors On-Board Unmanned Aerial Vehicles. Remote Sens. 2018, 10, 615. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Sedano-Cibrián, J.; Pérez-Álvarez, R.; De Luis-Ruiz, J.M.; Pereda-García, R.; Salas-Menocal, B.R. Thermal Water Prospection with UAV, Low-Cost Sensors and GIS. Application to the Case of La Hermida. Sensors 2022, 22, 6756. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Lin, S.; Kambhamettu, C.; Yu, J.; Kang, S.B. Single-Image Vignetting Correction. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2243–2256. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.Y. Luna983/Stitch-Aerial-Photos: Stable v1.1. 2020. Available online: https://github.com/luna983/stitch-aerial-photos (accessed on 18 June 2023).
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Muja, M.; Lowe, D.G. Fast Approximate Nearest Neighbors with Automatic Algorithm Configuration. In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications (VISIGRAPP 2009)—Volume 1: VISAPP, Lisboa, Portugal, 5–8 February 2009; pp. 331–340. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- John, C.; Allan, H.D. A First Look at Graph Theory; Allied Publishers: New Delhi, India, 1995. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alias | Location | Time | Conditions | Water Temperature |
|---|---|---|---|---|
| A | Kocinka, Rybna | 15 December 2021 12:20 | Fog, snow cover | 4.6 °C |
| B | Kocinka, Rybna | 18 January 2022 14:55 | Snow cover, total cloud cover | 2.6 °C |
| C | Kocinka, Rybna | 25 March 2022 07:30 | No cloud cover | 5.6 °C |
| D | Sudół, Kraków | 20 December 2022 11:20 | Moderate cloud cover | 2.0 °C |
| E | Kocinka, Grodzisko | 11 January 2023 11:00 | No cloud cover | 4.2 °C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szostak, R.; Zimnoch, M.; Wachniew, P.; Jasek-Kamińska, A. Self-Calibration of UAV Thermal Imagery Using Gradient Descent Algorithm. Drones 2023, 7, 683. https://doi.org/10.3390/drones7110683
Szostak R, Zimnoch M, Wachniew P, Jasek-Kamińska A. Self-Calibration of UAV Thermal Imagery Using Gradient Descent Algorithm. Drones. 2023; 7(11):683. https://doi.org/10.3390/drones7110683
Chicago/Turabian StyleSzostak, Radosław, Mirosław Zimnoch, Przemysław Wachniew, and Alina Jasek-Kamińska. 2023. "Self-Calibration of UAV Thermal Imagery Using Gradient Descent Algorithm" Drones 7, no. 11: 683. https://doi.org/10.3390/drones7110683
APA StyleSzostak, R., Zimnoch, M., Wachniew, P., & Jasek-Kamińska, A. (2023). Self-Calibration of UAV Thermal Imagery Using Gradient Descent Algorithm. Drones, 7(11), 683. https://doi.org/10.3390/drones7110683