
UAV Deployment Optimization for Secure Precise Wireless Transmission


Abstract
:1. Introduction
1.1. Background and Related Works
1.2. Motivation
1.3. Contributions
- We propose a novel SPTW framework with UAV secure communications which improves transmission security by change UAV’s position.
- Proposed UAV SPWT scheme is based on DM but not FDA, which can reduce the radio frequency chains’ cost. Meanwhile, the computational complexity will be significantly reduced.
- Conventional SPWT improves security performance with aided AN, while our proposed scheme deploys the transmitter, e.g., UAV on the zero SINR space of Eve, and the power originally allocated to artificial noise can be used to transmit useful information, which greatly improves Bob’s signal-to-interference-and-noise ratio (SINR) without affecting Eve’s SINR, thus enhancing the security performance.
2. Method
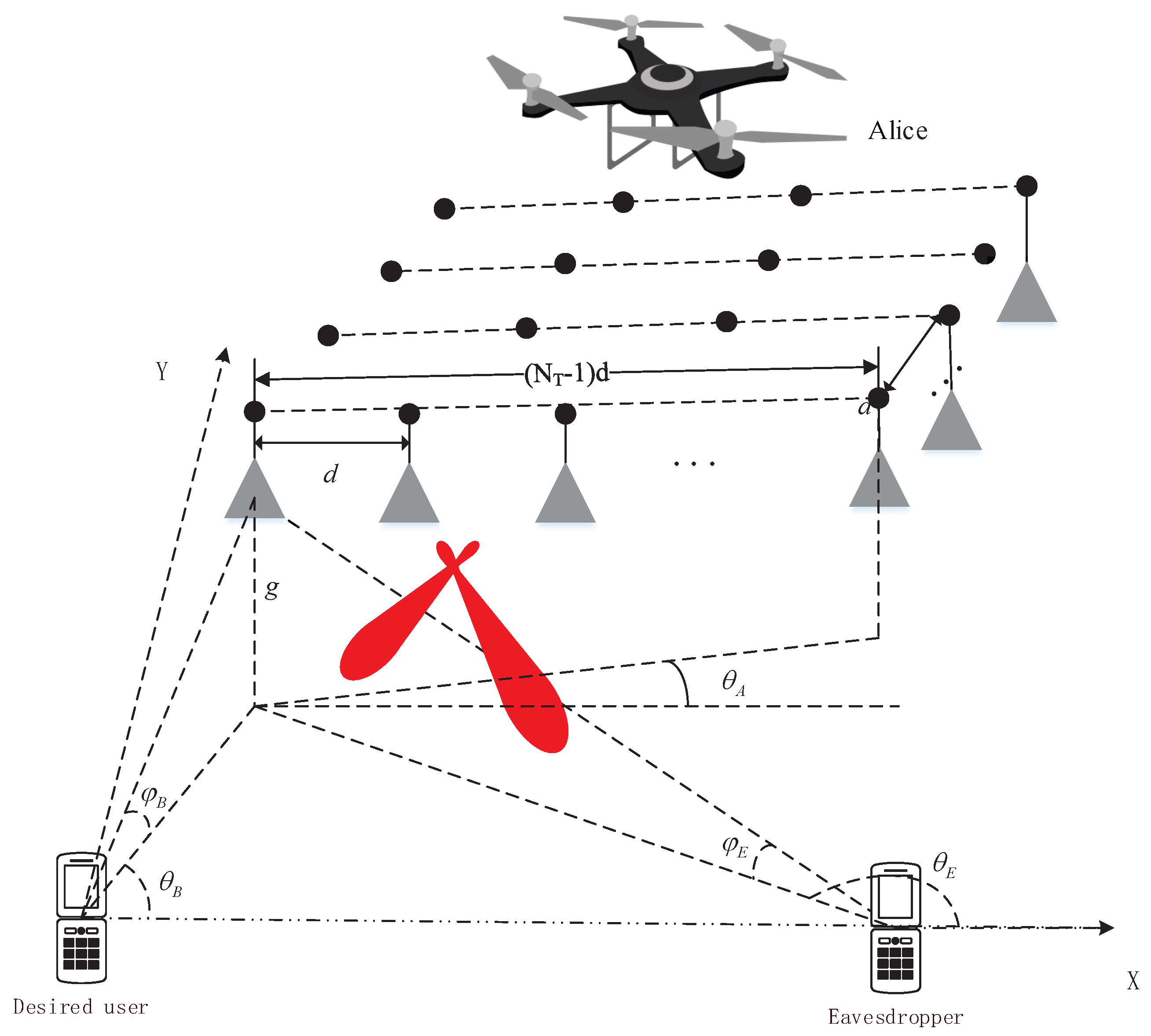
2.1. System Model
2.2. Proposed UAV Deployment Schemes
3. Simulation Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| SPWT | Secure Precise Wireless Transmissions |
| SR | Secrecy Rate |
| AN | Artificial Noise |
| DM | Directional Modulation |
| RF | Radio Frequency |
| FDA | Frequency Diverse Array |
| LoS | Line-of-Sight |
| 3D | Three-Dimensional |
References
- Wu, Y.; Khisti, A.; Xiao, C.; Caire, G.; Wong, K.-K.; Gao, X. A survey of physical layer security techniques for 5G wireless networks and challenges ahead. IEEE J. Sel. Areas Commun. 2018, 36, 679–695. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Ng, D.W.K.; Gerstacker, W.H.; Chen, H.-H. A survey on multiple-antenna techniques for physical layer security. IEEE Commun. Surv. Tutor. 2017, 19, 1027–1053. [Google Scholar] [CrossRef]
- Bai, J.; Wang, H.-M.; Liu, P. Robust irs-aided secrecy transmission with location optimization. IEEE Trans. Commun. 2022, 70, 6149–6163. [Google Scholar] [CrossRef]
- Rao, H.; Xiao, S.; Yan, S.; Wang, J.; Tang, W. Optimal geometric solutions to uav-enabled covert communications in line-of-sight scenarios. IEEE Trans. Wirel. Commun. 2022, 21, 10633–10647. [Google Scholar] [CrossRef]
- Daly, M.P.; Bernhard, J.T. Directional modulation technique for phased arrays. IEEE Trans. Antennas Propag. 2009, 57, 2633–2640. [Google Scholar] [CrossRef]
- Yuan, D.; Fusco, V.F. Orthogonal vector approach for synthesis of multi-beam directional modulation transmitters. IEEE Trans. Antennas Wirel. Propagat. Lett. 2015, 14, 1330–1333. [Google Scholar]
- Jinsong, H.; Feng, S.; Jun, L. Robust synthesis method for secure directional modulation with imperfect direction angle. IEEE Commun. Lett. 2016, 20, 1084–1087. [Google Scholar]
- Sammartino, P.F.; Baker, C.J.; Griffiths, H.D. Frequency diverse MIMO techniques for radar. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 201–222. [Google Scholar] [CrossRef]
- Nusenu, S.Y.; Huaizong, S.; Ye, P. Power allocation and equivalent transmit fda beamspace for 5G mmwave noma networks: Meta-heuristic optimization approach. IEEE Trans. Veh. Technol. 2022, 71, 9635–9646. [Google Scholar] [CrossRef]
- Hu, Y.Q.; Chen, H.; Ji, S.-L.; Wang, W.-Q.; Chen, H. Adaptive detector for fda-based ambient backscatter communications. IEEE Trans. Wirel. Commun. 2022, 21, 10381–10392. [Google Scholar] [CrossRef]
- Wang, L.; Wang, W.-Q.; So, H.C. Covariance matrix estimation for fda-mimo adaptive transmit power allocation. IEEE Trans. Signal Process. 2022, 70, 3386–3399. [Google Scholar] [CrossRef]
- Shen, T.; Zhang, S.; Chen, R.; Wang, J.; Hu, J.; Shu, F.; Wang, J. Two Practical Random-Subcarrier-Selection Methods for Secure Precise Wireless Transmissions. IEEE Trans. Veh. Technol. 2019, 68, 9018–9028. [Google Scholar] [CrossRef]
- Shen, T.; Lin, Y.; Zou, J.; Wu, Y.; Shu, F.; Wang, J. Low-Complexity Leakage-Based Secure Precise Wireless Transmission with Hybrid Beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 1687–1691. [Google Scholar] [CrossRef]
- Shu, F.; Wu, X.; Hu, J.; Li, J.; Chen, R.; Wang, J. Secure and precise wireless transmission for random-subcarrier-selection-based directional modulation transmit antenna array. IEEE J. Sel. Areas Commun. 2018, 36, 890–904. [Google Scholar] [CrossRef]
- Zhou, X.; Yan, S.; Hu, J.; Sun, J.; Li, J.; Shu, F. Joint optimization of a uav’s trajectory and transmit power for covert communications. IEEE Trans. Signal Process. 2019, 67, 4276–4290. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-uav enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef] [Green Version]
- Yi, F.; Zhang, C.; Baek, S.; Rawashdeh, S.; Mohammadi, A. Autonomous Landing of a UAV on a Moving Platform Using Model Predictive Control. Drones 2018, 2, 34. [Google Scholar] [CrossRef] [Green Version]
- Ouamri, M.A.; Oteşteanu, M.-E.; Barb, G.; Gueguen, C. Coverage Analysis and Efficient Placement of Drone-BSs in 5G Networks. Eng. Proc. 2022, 14, 18. [Google Scholar] [CrossRef]
- Shen, A.; Luo, J.; Ning, J.; Li, Y.; Wang, Z.; Duo, B. Safeguarding UAV Networks against Active Eavesdropping: An Elevation Angle-Distance Trade-Off for Secrecy Enhancement. Drones 2023, 7, 109. [Google Scholar] [CrossRef]
- Zhou, X.; Yan, S.; Shu, F.; Chen, R.; Li, J. UAV-Enabled Covert Wireless Data Collection. IEEE J. Sel. Areas Commun. 2021, 39, 3348–3362. [Google Scholar] [CrossRef]
- Hu, J.; Wu, Y.; Chen, R.; Shu, F.; Wang, J. Optimal Detection of UAV’s Transmission with Beam Sweeping in Covert Wireless Networks. IEEE Trans. Veh. Technol. 2020, 69, 1080–1085. [Google Scholar] [CrossRef]
- Li, Y.; Shu, F.; Shi, B.; Cheng, X.; Song, Y.; Wang, J. Enhanced RSS-based UAV localization via trajectory and multi-base stations. IEEE Commun. Lett. 2021, 25, 1881–1885. [Google Scholar] [CrossRef]
- Cheng, X.; Shu, F.; Li, Y.; Zhuang, Z.; Wu, D.; Wang, J. Optimal Measurement of Drone Swarm in RSS-Based Passive Localization with Region Constraints. IEEE Open J. Veh. Technol. 2023, 4, 1–11. [Google Scholar] [CrossRef]
- Zhou, X.; Li, J.; Shu, F.; Wu, Q.; Wu, Y.; Chen, W.; Hanzo, L. Secure SWIPT for Directional Modulation-Aided AF Relaying Networks. IEEE J. Sel. Areas Commun. 2021, 37, 253–268. [Google Scholar] [CrossRef] [Green Version]
- Kraus, J.D.; Marhefka, R.J. Antennas For All Applications; McGraw-Hill, Inc.: New York, NY, USA, 2002. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The number of transmitter antennas () | |
| Total signal bandwidth (B) | 5 MHz |
| Total transmit power (P) | 1 W |
| The height of UAV (g) | 200 m |
| The eavesdropper’s position () | (500 m, 0) |
| The flight angle of UAV () | |
| Central carrier frequency () | 3 GHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, T.; Xia, G.; Ye, J.; Gu, L.; Zhou, X.; Shu, F. UAV Deployment Optimization for Secure Precise Wireless Transmission. Drones 2023, 7, 224. https://doi.org/10.3390/drones7040224
Shen T, Xia G, Ye J, Gu L, Zhou X, Shu F. UAV Deployment Optimization for Secure Precise Wireless Transmission. Drones. 2023; 7(4):224. https://doi.org/10.3390/drones7040224
Chicago/Turabian StyleShen, Tong, Guiyang Xia, Jingjing Ye, Lichuan Gu, Xiaobo Zhou, and Feng Shu. 2023. "UAV Deployment Optimization for Secure Precise Wireless Transmission" Drones 7, no. 4: 224. https://doi.org/10.3390/drones7040224
APA StyleShen, T., Xia, G., Ye, J., Gu, L., Zhou, X., & Shu, F. (2023). UAV Deployment Optimization for Secure Precise Wireless Transmission. Drones, 7(4), 224. https://doi.org/10.3390/drones7040224