1. Introduction
With the rapid development of artificial intelligence and drone technology, using drones to perform tasks has become a research focus and exploration direction in the academic community. The ability of drones to arrive at the task area on time and safely directly determines the success of the task. Whether a UAV swarm can arrive at the task area with the optimal path directly affects the efficiency of the entire swarm in performing tasks.
In order to improve the efficiency of UAV mission execution, scholars have conducted in-depth exploration and achieved fruitful results. These mainly include path-planning methods based on classical theory or swarm intelligence optimization.
The classic path-planning theory mainly focuses on the RRT algorithm, A* algorithm, Dubins path, Dijkstra algorithm, etc. It has a solid theoretical foundation and research results.
Before path planning, it is necessary to quantify the geographical environment. The processing methods for geographical environments mainly include digital simulation, rasterization, and the Voronoi diagram. Based on the elevation map, researchers [
1,
2] converted it into a digital topographic map for path planning. The authors of [
3] designed a method for the feature extraction of three-dimensional maps, which added new features to two-dimensional maps and obtained more information compared to two-dimensional maps. The Voronoi diagram [
4,
5] divides the task area into a large number of equal-area regions. When performing search tasks, it can divide the whole into parts, which is more convenient for quantifying the effectiveness of search methods. Based on this, in [
6,
7], a generalized Voronoi diagram method was established. This method uses the relationship between the edge of each block and the starting position to further shorten the path length of UAVs.
After preprocessing the environment, classical path-planning methods can be used to solve the problem. The RRT algorithm [
8,
9] uses a random tree approach to search for the shortest path between the starting point and the destination point. Based on this, the authors of [
10] designed a bidirectional random tree, which improved the search speed and ensured the convergence of the search. In [
11], the authors constructed a method for designing the shape of random trees based on prior knowledge, which improved the search efficiency. In another study [
12], a path-planning method was developed based on time-varying ocean characteristics according to the maritime environment. This research had a positive role in promoting the subsequent research carried out in this study on time-varying environments.
The A* algorithm [
13,
14] is a method for quickly searching for the shortest path. Due to its simple operation and good results, it is widely used in path planning. Based on the A* algorithm, the authors of [
15] constructed an improved sparse A* algorithm based on the results of interaction with the environment. This method can better avoid the threat of ground radar. In [
16], combined with the geometric configuration of the mission area, a geometric A* algorithm was proposed. This method significantly reduced the number of maximum turns of the aircraft, making the planned path smoother. The authors of [
17] improved the search strategy of the A* algorithm and integrated it with the Delaunay triangulation method, shortening the total length of the path and reducing the number of turns. The authors of [
18] nested the A* algorithm and proposed a multilevel hybrid A* algorithm. Although the hybrid algorithm was much more complex than the classic A* algorithm, the constructed algorithm can plan feasible and optimal routes in extremely complex environments.
The Dubins path [
19,
20] ensures that the drone can smoothly turn in the shortest path, improving the efficiency of mission planning for long-distance flights. Based on the Dubins path, the authors of [
21] implemented a path-planning method under the constraints of restricted areas and directional constraints to achieve the goal of planning the shortest path under complex constraints. In [
22], the authors used the wolf algorithm to optimize the angle control of the drone under the requirements of the Dubins path, resulting in a minimum cost. Similarly, the authors of [
23] also used a quadratic differential approach to achieve optimal control of the platform under the constraints of the Dubins path.
The Dijkstra algorithm [
24,
25] is similar to a greedy algorithm. It iteratively searches for points that are closer to itself to optimize the path. The literature [
26] combined the Dijkstra algorithm with the Delaunay triangulation method to design a method for finding the optimal path on a curved surface. The authors of [
27] further combined the Dijkstra algorithm with the Ahuja algorithm and also used it in tandem with the Delaunay triangulation method to design a path-planning method suitable for cruise missiles. In [
28], researchers constructed a backward-labeled Dijkstra algorithm, to minimize the time required to complete the task.
The method based on swarm intelligence optimization mainly converts the path-planning problem into an optimization problem and then uses intelligent algorithms to solve it, that is, by constructing a mathematical model to quantify the objective function during the execution of the task. At the same time, considering the motion characteristics, environmental factors, and task requirements of the drone, constraints are set. Since the problem to be optimized is usually NP-Hard, it is necessary to use intelligent optimization algorithms to solve and obtain the path of UAVs. Typical intelligent optimization algorithms mainly include particle swarm optimization (PSO) [
29], ant colony optimization (ACO) [
30], genetic algorithm (GA) [
31], and so on.
Path planning based on the PSO algorithm is mainly addressed in [
32,
33,
34,
35,
36,
37]. The authors of [
32] designed a distributed search method to address the problem of PSO being prone to local optimization. This method allows particles to exchange information in clusters, thereby improving the search accuracy of the area and enhancing the efficiency of collaborative search for UAV swarms. The authors of [
33] improved PSO using the artificial potential field method, which improved the quality of path optimization and reduced the optimization time of the algorithm. In another study [
34], the improved A* algorithm was combined with the PSO algorithm, which planned a path with good anti-interference performance and a shorter journey. In [
35,
36], PSO and a model predictive control or genetic algorithm were combined, respectively, making the optimized path more suitable for solving corresponding problems. The authors of [
37] constructed an improved quantum particle swarm algorithm, which improved the safety of the path and shortened the total length of the path.
The use of ACO for path planning has also achieved good results [
38,
39,
40,
41,
42]. The authors of [
38] combined fuzzy logic with an improved ACO algorithm to optimize more effective and safer paths. The authors of [
39] designed a fallback strategy based on the changing characteristics of pheromones to improve algorithm performance. The improved ACO algorithm can significantly improve the efficiency of path planning. In [
40], time windows were combined with ACO to achieve path planning in complex three-dimensional environments. The authors of [
41] used the artificial potential field method to improve ACO to enhance the convergence speed of the algorithm, thereby improving the efficiency of path planning. The authors of [
42] constructed a two-level optimization architecture based on the combination of the A* algorithm and the ACO algorithm, using two strategies to improve the speed of path planning.
There are also many research results on using GAs for path planning [
43,
44,
45,
46]. The authors of [
43] integrated a GA and ACO to achieve the integrated scheduling of dual tasks of UAV task allocation and path planning. The proposed method can realize the whole process from task publishing to path planning. In [
44], the GA method and the Cuckoo algorithm were combined to ensure a smooth path while taking into account the safety of the path. The authors of [
45] combined a GA with a distributed estimation algorithm to improve the search performance of the GA and enhance the efficiency of the collaborative search of the task platform. The authors of [
46] used a GA to achieve multiobjective optimization in path planning, which enabled the task platform to better avoid obstacles.
At the same time, in order to comprehensively consider and refine the constraints of drones during flight further, scholars have constructed geofencing to achieve real-time optimization and control of the motion parameters of drones. In [
47], an explicit reference governor framework was designed to ensure that drones can successfully reach predetermined locations. The authors of [
48] utilized geofencing to ensure that drones did not fly into no-fly zones while maximizing the capacity of airspace. The authors of [
49] constructed a self-adapted difference multiobjective optimization algorithm under the constraints of geofencing to improve the safety of drone flight.
Studies at this stage have made outstanding contributions to improving the efficiency of the path planning of UAVs and also provide reference ideas and research frameworks for subsequent research. However, there are still contents to be further analyzed and studied.
When planning the path of a drone swarm, the atmospheric impact is not considered or set as a constant. Obviously, this is not consistent with the actual situation, and atmospheric parameters have a significant impact on drones.
The atmospheric conditions studied in this article are mainly divided into two categories. One is wind, and the other is mobile extreme weather.
This article draws on internationally accepted wind classification standards and divides wind into weak, strong, and extreme wind based on its impact on the stability of the drone. Weak wind will have a cumulative impact on the drone’s heading. A drone subjected to weak wind will have a slight deviation in its path. Over time, this deviation will increase, which may lead to the drone deviating or getting lost. Strong wind will directly affect the stability of the drone, causing harm to the drone itself. Extreme wind refers to extreme weather that has a devastating effect on the drone.
Extreme weather mainly includes thunderstorm clouds and severe convective weather. Once the drone approaches these two types of weather, it is highly likely to lose control and even crash. Thunderstorm clouds are not static clouds, and they can move and expand. Therefore, it is necessary to study and predict the path and trend in order to avoid their threats in advance. Severe convective weather itself is not observable optically. Therefore, it is important to pay attention to the impact of such weather on drone swarms.
To this end, this article involves an analysis of environmental parameters. The main research focuses on the impact of wind and mobile extreme weather on drones, thereby weakening the impact of weather or avoiding the harm of the atmosphere to drones as early as possible.
The main contributions of this article are as follows:
- (1)
A deep learning-based atmospheric parameter prediction method is constructed. Based on the prediction results, the path of the drone swarm is optimized and adjusted, ensuring that the drones can fly according to the set path, avoid severe weather, and ensure their own safety.
- (2)
A method for predicting atmospheric parameters using deep learning is proposed. Compared to existing theoretical models, such methods can accurately characterize the deeper coupling relationships between more parameters, thereby improving the accuracy of prediction.
- (3)
Mathematical models of wind, static threats, and mobile threats are constructed, and objective functions and beam conditions are designed for path optimization under various threats and mission completion conditions, thereby establishing a complete path optimization process and method.
- (4)
Combining the problems to be optimized and the deficiencies of the prediction network itself, we improved the deep network from two aspects: method applicability and network parameter adjustment. The proposed methods and ideas can be used to improve other deep networks.
The problem of path optimization under the influence of the atmospheric environment is introduced in
Section 2. The mathematical models of three typical threats to UAVs in the actual flight process are constructed in
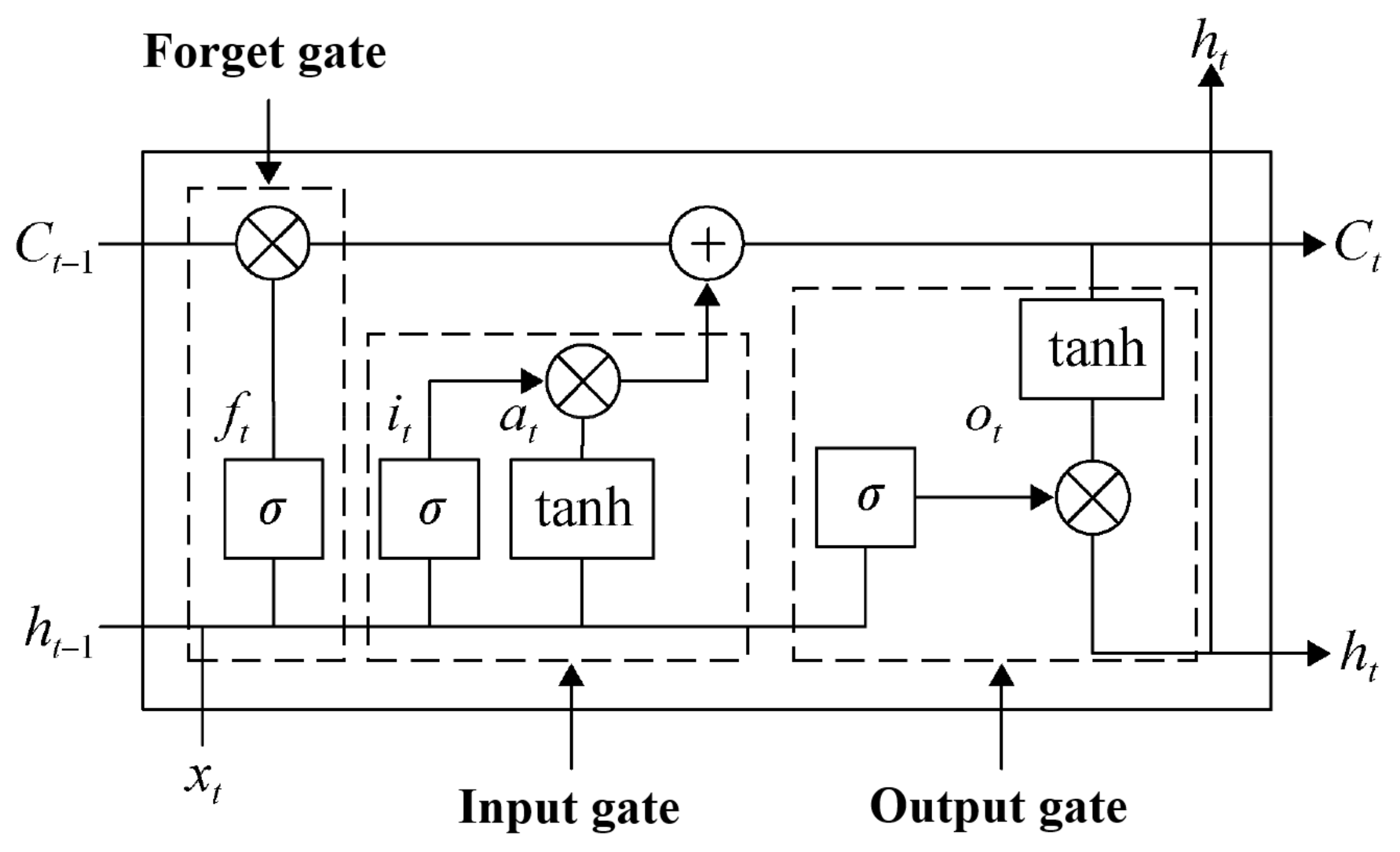
Section 3. After that, the climatic characteristics of wind, thunderstorm clouds, and severe convective threats are analyzed, and it is clear that these atmospheric parameters are time series data with high spatial correlations. The LSTM network is improved, and the atmospheric parameters are predicted by deep learning in
Section 4. Then, the route planning process based on parameter prediction is constructed in
Section 5. Finally, the algorithm is simulated to verify its response to dynamic threats in
Section 6, and conclusions are drawn in
Section 7.
2. Problem Description
2.1. The Threat of Wind and Sudden Weather to UAVs
Wind has the most extensive and lasting impact on the stability of drones, and it also poses the greatest threat to drones. The power and direction of fixed-wing drones mainly rely on wind, and the impact of wind is self-evident. The impact of wind on drones during flight is shown in
Figure 1.
As shown in
Figure 1, wind affects the stability and motion state of UAVs. When the wind field is unstable, the stability of the drone will inevitably decrease, which will affect the flight safety of the drone.
For a single UAV, the influence of wind is persistent. If the wind factor is not considered, and the state and path of the UAV are not corrected, the UAV will deviate from its path over time. For a UAV swarm, without considering the impact of wind on the UAVs, different individuals will be affected by different winds, resulting in the swarm configuration chaos and even the risk of UAV collision in the swarm.
When the drone is performing tasks at sea, due to the influence of ocean currents and the atmosphere, there is a possibility of sudden changes in climate conditions. Extreme weather such as thunderstorms and severe convective weather may occur in the task area. The impact of severe weather on the drone is shown in
Figure 2.
As can be seen from
Figure 2, when encountering severe weather, the airfield of the drone undergoes significant changes. As can be seen from
Figure 2b, the stability of the drone is significantly affected at this time, even threatening the safety of the drone itself.
Thunderstorm clouds are observable, while severe convective weather is difficult to observe with the naked eye.
Therefore, it is necessary to predict wind and sudden weather conditions, so as to adjust the motion parameters of UAVs in advance and reduce their impact on these systems.
2.2. Influence of Environmental Parameters on the UAV Path
Considering the course of an actual flight, the effect of wind on the drone is shown in
Figure 3.
As shown in
Figure 3, during the actual flight of the drone, sudden threats may arise at any time. When the drone flies to the target point according to a predetermined path, it may encounter a no-fly zone or thunderstorm cloud, which is represented by the red circle in
Figure 3. In this case, the drone cannot fly according to the planned path and must adjust its own route. At the same time, winds will also affect the stability of the drone. It is possible that the drone is blown off its original route and then adjusted, as shown in
Figure 3. From
Figure 3, it can be seen that when there is a sudden threat, the drone’s path needs to be adjusted in real time to weaken the impact of the threat.
Although these threats are sudden, they are not completely unpredictable. For example, the parameters of the wind, which change relatively smoothly and have a certain regularity, can be predicted in the short term. At the same time, by studying environmental parameters, it is also possible to predict the trajectory of thunderstorms and avoid them.
Therefore, it is necessary to predict the parameters of the atmospheric environment in order to consider and quantify these factors during the path-planning process. Ultimately, this will weaken the impact of atmospheric changes on the drone and ensure that it can safely reach the mission area.
2.3. Difficulties in Predicting Atmospheric Parameters and Applicability of Deep Learning
Through the study of environmental factors and historical data, a simulated distribution map of the wind field can be constructed, which can then quantify the wind parameters that cannot be observed optically. However, it is clear that quantification is only the first step in studying and utilizing wind. In order to minimize the impact of the atmosphere on the performance of the drone swarm, it is necessary to further predict the specific conditions of wind parameters near the path points at subsequent times. At present, prediction methods for atmospheric parameters can be mainly divided into four categories, as shown in
Figure 4.
The physical model method is a predictive model of atmospheric parameters that is constructed based on domain knowledge. Such models include the well-known Dryden model, the Davenport model, and the Mann model in the atmospheric field. The advantage is that the model has good interpretability, meaning that each formula is supported by professional background knowledge, making it easy to understand, improve, and refine. Its disadvantage is that the accuracy of parameter fitting affects the performance of the model. The atmospheric system is a complex system, and the relationships between parameters are generally nonlinear, which is difficult to effectively characterize. For the purpose of analysis and optimization, the physical model-based method often adopts some ideal assumptions or approximates some relationships as linear relationships. In the short term, parameters can be approximately equivalent, but as time goes on, the nonlinear relationship between parameters becomes more prominent, resulting in deviations in the accuracy of the constructed model.
Statistical model methods are mainly divided into parametric and nonparametric methods. The parametric method is relatively mature, mainly including Gaussian mixture models and regression models. The idea of Gaussian mixture models is to treat data as a mixture of different parameter Gaussian models and determine the parameters of each Gaussian model to obtain a description of the original parameters. Regression models are based on least squares, treating the original data as monadic or multidimensional superposition models, and by determining the highest order and corresponding parameters, we can obtain a regression model to describe the corresponding sequence. Nonparametric methods are more based on assumptions to determine the distribution state of the target parameters and then determine the corresponding parameters. Such methods are completely based on mathematical models and probability theory, with a long research history and solid foundation, as well as good interpretability and research depth. However, as mentioned in this paragraph, the accuracy of such methods is also related to the accuracy of the model. The relationships between atmospheric parameters involve high-dimensional coupling and constraint associations, which are difficult to effectively describe based on statistical model methods. Therefore, such methods are more used for single-variable prediction, while for high-dimensional data, the method performance is significantly limited.
The time series method considers the time series characteristics and spatial–temporal correlations within the atmospheric data sequence to make predictions. The most representative method in this category is Kalman filtering and its improved versions. By constructing the Kalman equation set, the recursive relationship between parameters is obtained, thus achieving the filtering of the original data and determining the abnormal data. Due to its solid theoretical foundation, Kalman filtering has been widely applied in many fields. Scholars continue to improve and refine it to further enhance its performance. However, the performance of Kalman filtering is highly correlated with the parameters in its recursive formula. These parameters are learned from samples, but it is difficult for this method to learn data with large samples and different distribution types, which leads to performance bottlenecks. Moreover, its performance does not significantly improve with the increase in learning data.
Deep learning-based methods have the advantages of the aforementioned time series methods; that is, by mining the original data, the internal logic and time series relationships can be obtained, and the parameters can be adjusted accordingly. At the same time, such methods can obtain high-dimensional features of atmospheric data through nonlinear activation functions. In terms of performance and prediction accuracy, their effects have obvious advantages. However, there are also obvious deficiencies. The first is a lack of interpretability. Although good results have been achieved in obtaining high-dimensional features of data, the meaning of this feature itself is not interpretable. The second deficiency is that hyperparameters affect network performance. Even with the same network architecture, different internal layer numbers, node numbers in a certain layer, or hyperparameters such as learning rate can affect network performance. However, there is no clear optimal value method for these hyperparameters, and it is more common to perform iteration and trial and error to continuously adjust them and build a detection network with good performance. The third is the large amount of computation.
Considering the problem of parameter prediction studied in this article, it can be seen that the parameters of wind have a high degree of spatial and temporal correlation, and there is a high-dimensional coupling between data. The spatial correlation refers to the fact that the parameters of wind are not only related to parameters such as temperature and altitude near a certain point but also to the wind direction and speed of other points. The temporal correlation refers to the fact that the parameters of wind in a certain area have a certain periodic variation pattern, which can be obtained through the analysis of historical data. Therefore, the essence of predicting atmospheric parameters is to predict sequences with spatial and temporal correlation.
Combining the problem requirements and method characteristics, we used deep learning to predict wind parameters. By learning the historical parameters in each small region of the entire task area, a parameter prediction network is constructed to achieve accurate prediction. This method can construct high-dimensional mapping relationships. It can obtain deeper parameter relationships with other factors, such as altitude, temperature, light intensity, and air humidity. Compared to other methods, its performance has obvious advantages.
6. Simulation Verification
6.1. Path Considering Wind Influence
To verify the impact of wind on the path of a drone, in this section, we compare the optimal path planning with and without wind, thus reflecting the effect of wind on the drone.
We first set the task area and use the planning method in
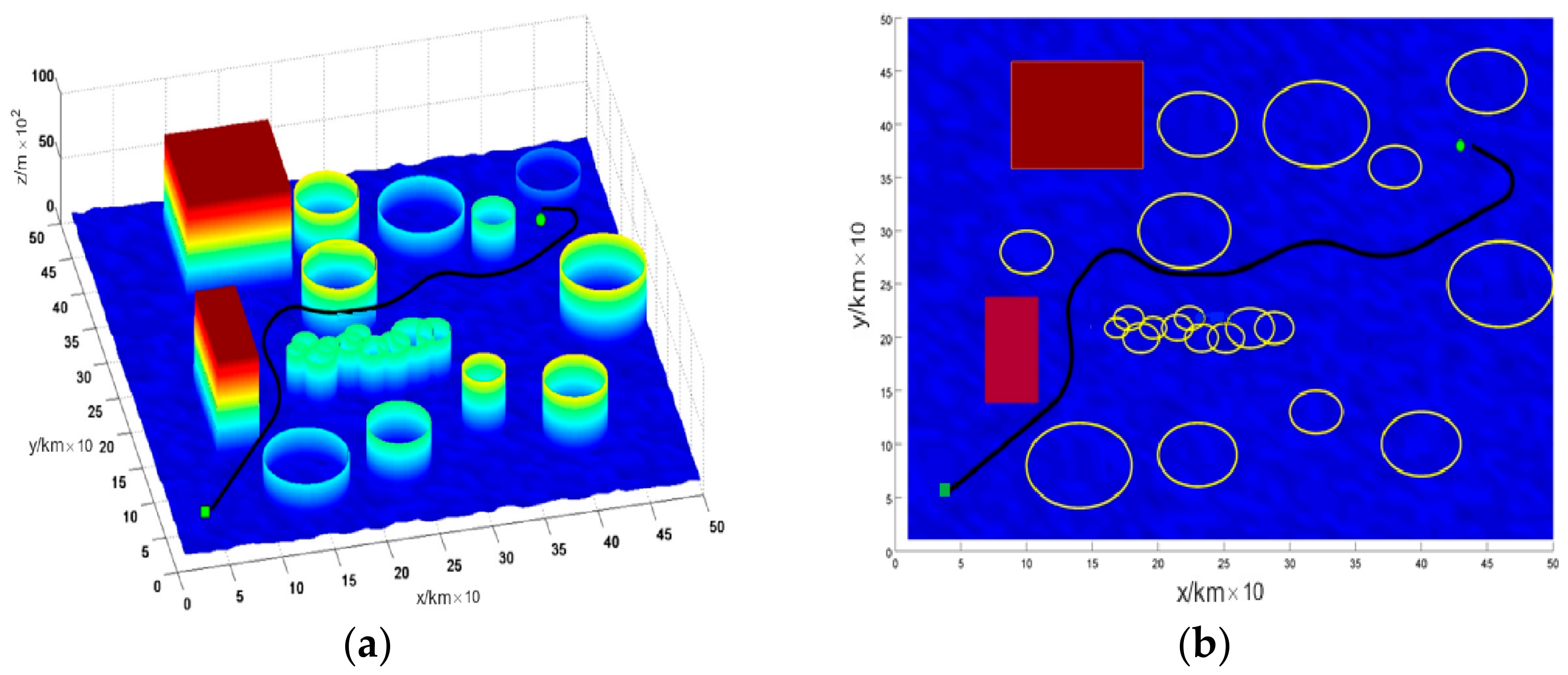
Section 5 to optimize the UAV path, resulting in the path shown in
Figure 18.
The red rectangular area is a no fly zone. The individual yellow circles represent peaks or thunderstorm clouds. The yellow circle represents the area of strong convection. Next, assuming there are weak and strong winds in the negative direction along the Y-axis, the UAV flies along the ideal path. When it is unable to avoid the obstacle zone, secondary planning is performed on the UAV path, and the results are shown in
Figure 19 and
Figure 20.
Comparing
Figure 18 and
Figure 19, it can be seen that the drone can still fly along the route in the initial stage. However, as time accumulates, its error gradually becomes prominent. This makes it difficult for the drone using the path in
Figure 19b to fly past the obstacle at (20, 30) like in
Figure 18b. At this point, if the aircraft continues to fly in the original direction, it will inevitably hit the thunderstorm area at (20, 30). Therefore, it is necessary to re-plan the path of the drone, resulting in the path shown in
Figure 19.
As can be seen from the comparison between
Figure 18 and
Figure 20, the drone is affected by strong winds, and it is difficult for the drone to fly over the thunderstorm area at (20, 30). It is also necessary to conduct path replanning. Due to the influence of strong winds in subsequent stages, when using the method proposed in this paper for planning, the aircraft no longer flies over the path with a short distance between the two circles at (40, 40) but flies below it, thus ensuring the safety of the drone.
The result of route planning using the method in this article is shown in
Figure 21.
As can be seen from
Figure 21, the replanned path is longer than that in
Figure 19; also, the corresponding cost function is inevitably increased. However, from the perspective of flight safety, this flight path is safer and closer to reality.
Through the simulation experiments in this section, it can be seen that wind has a significant impact on the path and may even prevent the planned path from being used. Therefore, when planning the path, it is necessary to consider the impact of wind on the drone to ensure that the path is feasible.
6.2. Path Planning Considering Wind and Mobile Threats
Assuming that there are moving obstacles during the flight of the UAV swarm, other simulation conditions remain unchanged. The optimization results obtained using the method in this article are shown in
Figure 22.
In
Figure 22, point C is the starting point of the thunderstorm cloud. The thunderstorm cloud moves in the positive direction of the X-axis and the negative direction of the Y-axis. As can be seen from
Figure 22, if the drone at point G follows its original path, which is indicated by the yellow dotted line, it is likely to enter the thunderstorm area and affect its own safety. At this time, by predicting the path of the thunderstorm cloud, the drone adjusts its path and operates in the direction of point G → point D → point A → point C to avoid the thunderstorm cloud.
At the same time, this can also show the advantage of the UAV swarm; that is, when there is a problem with the path of a drone, the drone only needs to fly as close as possible to other drones to ensure its relative safety.
To further characterize the decision-making process of the drone, only the path of the drone is plotted, as shown in
Figure 23 and
Figure 24.
As shown in
Figure 23, when the drone is located at point G, a thunderstorm cloud swarm forms at point C, and its location is known through meteorological information. It is predicted that there is a risk of collision between the original path of the drone and the path of the thunderstorm cloud. Therefore, the drone adjusts its own direction to move closer to other safe drone paths to avoid the impact of moving obstacles.
Through the simulation verification in this section, it can be seen that when there is a moving obstacle, if the space where its path has appeared is completely avoided, it is more difficult to obtain good optimization results. It is necessary to optimize the path based on the time window and motion characteristics of each platform so as to ensure better planning results while avoiding threats.
6.3. Comparison of Path-Planning Methods
To further compare the performance of path-planning methods, the simulation conditions remain unchanged, and the algorithms in this paper are compared with those in the literature [
12,
37,
46].
Based on the simulation results in
Section 6.1 and
Section 6.2, three sets of experiments were conducted. The first set was conducted under weak wind conditions without mobile threats. The second set was conducted under strong wind conditions without mobile threats. The third set was conducted under wind conditions with mobile threats.
Each group of experiments involved 50 Monte Carlo simulation experiments, with 4 drones dispatched each time, for a total of 200 dispatched drones. The following five parameters were statistically analyzed as metrics:
Pa: The proportion that arrived at the target point.
Pl: The influence of wind on UAV flights resulted in deviation, and ultimately, a proportion of flights did not find or fly near the target point. Alternatively, the UAV was affected by a moving threat zone, oscillating in front of the threat zone and unable to leave the area. This is often referred to as the trap space in the RRT algorithm.
Pm: The proportion of sorties that flew into the threat zone.
Ds: The total distance flown in a single sortie. According to whether the UAV reached the target point, we used two methods to record the total flight distance of the UAV. The first was to record the distance flown directly after the drone reached the target point. The second was to record the maximum distance flown among all recorded distances if the drone flew into a threat zone or could not reach the target point.
Tc: The total optimization time for obtaining path results.
Experiments were conducted under conditions of no mobile threats and weak wind conditions, and the results are shown in
Table 2.
From the first set of comparison results, the method in the literature [
12] has better performance. This is because the method is based on RRT for improvement, achieving the shortest path search. In particular, the two indicators
Ds and
Tc are better because RRT itself does not require a large number of particles for optimization and iteration. Therefore, the time consumed for optimization is significantly better than other methods.
The remaining three methods have their own advantages and disadvantages in terms of results. The method in this paper takes longer and plans a longer route. This is because the method in this paper needs to revise the path based on the effect of wind, which requires a lot of time. At the same time, in order to offset the influence of wind, the distance is also longer. In [
37], the PSO algorithm was used to plan the path. Due to the lack of consideration of the influence of wind, there were two losses of sorties. However, due to its use of the PSO algorithm, its algorithm speed is faster than other swarm intelligence algorithms. The authors of [
46] used a genetic algorithm to optimize the multiobjective function in path planning. It makes real-time decisions based on perception results, which takes a longer time. Additionally, because it is not a global plan, the planned route is also longer.
Next, we conducted an experiment under strong wind conditions without mobile threats, and the results are shown in
Table 3.
As shown in
Table 3, when there is strong wind, the performance of different methods varies.
The method constructed in this article is relatively stable because it considers the impact of wind and performs secondary corrections on the path to ensure that the UAV can reach the target point. However, this comes at the expense of the total mileage of the UAV flight and the algorithm optimization time. The shortcomings of the method in [
12] also begin to manifest. This is mainly due to the impact of strong winds on the UAV, making it impossible to use the path planned along the edge of the threat area. Instead, it is blown into the threat area by the wind, resulting in a large
Pm. At the same time, due to the influence of wind, there is also the problem of RRT’s own trap space, which means that it oscillates within a certain area and cannot leave it. The method in [
37] has limited consideration for the impact of the atmosphere. This causes the UAV to be affected by strong winds and blown into the threat area or unable to reach the target point, resulting in significant increases in its
Pl and
Pm. Similarly, the success rate of executing tasks is not high, resulting in a rapid increase in its
Ds. The method in [
46] is real-time decision making, so the distinction between strong and weak winds is not obvious. However, due to insufficient consideration of the impact of wind, there have been cases where drones have been blown into the threat zone.
Finally, we conducted an experiment with mobile threat and wind conditions, and the results are shown in
Table 4.
As shown in
Table 4, compared with other methods, the performance of the proposed method in this paper in complex environments is superior, which can ensure the completion of tasks to the greatest extent. The method in [
12] has a trap space that often occurs in RRT algorithms due to the influence of dynamic threats and wind, resulting in an increase in
Pl. Moreover, due to the ability to fly along the edge of the threat area, it is easily blown into the threat zone by the wind, resulting in an increase in
Pm. Similarly, the method in [
46] also has the potential for local oscillations due to real-time decision making based on perception results, resulting in an increase in
Pl.
Through the comparison of the three sets of experiments and results, it can be seen that the method proposed in this paper has certain advantages and disadvantages. Compared with the method in [
12], the method proposed in this paper can independently design the objective function according to the task requirements and has good scalability. Additionally, the method in this article will not be constrained by the trap space. Compared with [
37], it can be seen that the ability of the UAV to successfully perform tasks is significantly improved considering the atmospheric and motion threats. The research results are more closely related to practical applications. Compared with the method in [
46], the method proposed in this paper can be planned offline and does not require excessive sensing equipment.
However, correspondingly, the shortcomings of this method are also obvious. Firstly, the planned path is longer, which limits the applicability of this method when it comes to quickly reaching the task area or saving energy. Secondly, the time required for planning is significantly longer than other methods, which means that more computing power or time is required to support it. Thirdly, and most importantly, this method requires a large volume of atmospheric data as the underlying support to characterize and predict atmospheric parameters in order to ensure algorithm accuracy.
6.4. Comparison of Optimization Algorithms
To further compare the performance and verify the prediction performance of the algorithm, the improved LSTM in this paper, the classic LSTM, the improved PSO-LSTM in [
50], and the GA-LSTM in [
51] were compared.
After training the improved LSTM network and the other three network parameters, we randomly selected 500-length data from the public dataset (DOI: 10.5281/zenodo.1443511, accessed on 15 March 2017) and input it into the four networks. We tested the prediction results 30 times and took the average, obtaining the comparison results shown in
Figure 25 and
Figure 26.
By comparing the results of
Figure 25 and
Figure 26, it can be seen that the algorithm in this paper has certain advantages over other methods. Compared with LSTM, the improved LSTM has improved performance due to the optimization of the corresponding network parameters. The method proposed in this paper makes adaptive improvements to the ABC algorithm, and its optimization performance is better than that of the PSO algorithm. Therefore, this method improves the network prediction accuracy better than the PSO-LSTM method in the literature [
50]. At the same time, compared with the GA-LSTM algorithm, only one parameter, learning rate, is optimized in the corresponding study [
51], and the performance improvement is limited compared to the results presented in this paper.
To quantitatively compare the performance of the four algorithms, the root-mean-squared errors (RMSEs) of the four algorithms were determined.
From the parameters in
Table 5, it can also be seen that our algorithm outperforms other algorithms in terms of performance. There are two other reasons for this result.
The first is the ABC algorithm, which can effectively avoid falling into local optima through information sharing and local search strategies, thus having global optimization capabilities. At the same time, modifying the ABC algorithm using chaos theory ensures that the ABC algorithm can search for global optima with a higher probability. However, both the PSO algorithm and the GA have inherent deficiencies in being unable to escape local optima.
The second reason is that the algorithm parameters have little impact on the ABC algorithm. The performance of the PSO algorithm is related to two learning factors. The values of these two learning factors directly affect the speed of algorithm convergence and even whether it is premature. The performance of the GA is related to selection and mutation factors. These two parameters affect the ability of the algorithm to search globally and locally, but there is a contradiction between them. If too much emphasis is placed on a global search, the search accuracy in some areas will be reduced, making it difficult to find the optimal solution. Conversely, it is easy to fall into local optimization. However, the ABC algorithm mainly adjusts the position of the bees, which has a limited impact on the efficiency of the algorithm.
However, the ABC algorithm also has its shortcomings, mainly due to its slow convergence time. During each iteration of the algorithm, the ABC algorithm is more complex than the PSO algorithm and the GA. The amount of computation per iteration is significantly higher than the other two methods. In order to ensure that the algorithm can search for the global optimum, the ABC algorithm requires more iterations. Through experiments, it can be seen that the optimization time required by the ABC algorithm is approximately 3.27 times that of PSO and 2.41 times that of GA.
It can be seen that when the computational power and time are sufficient, it is recommended to use the ABC algorithm to obtain a higher-quality solution.































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}