

A Nonparametric Regularization for Spectrum Estimation of Time-Varying Output-Only Measurements


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basics
2.1. Considered Systems and Assumptions
2.2. Non-Uniqueness Issues
3. The Proposed Identification Method
3.1. The Model
3.2. The Cost Function
3.3. The Kernel Functions
3.4. Construction of the Covariance Matrix
3.5. Tuning of the Model Complexity
3.6. Computational Concerns
3.7. Processing Long Measurements
3.8. Guide for Users
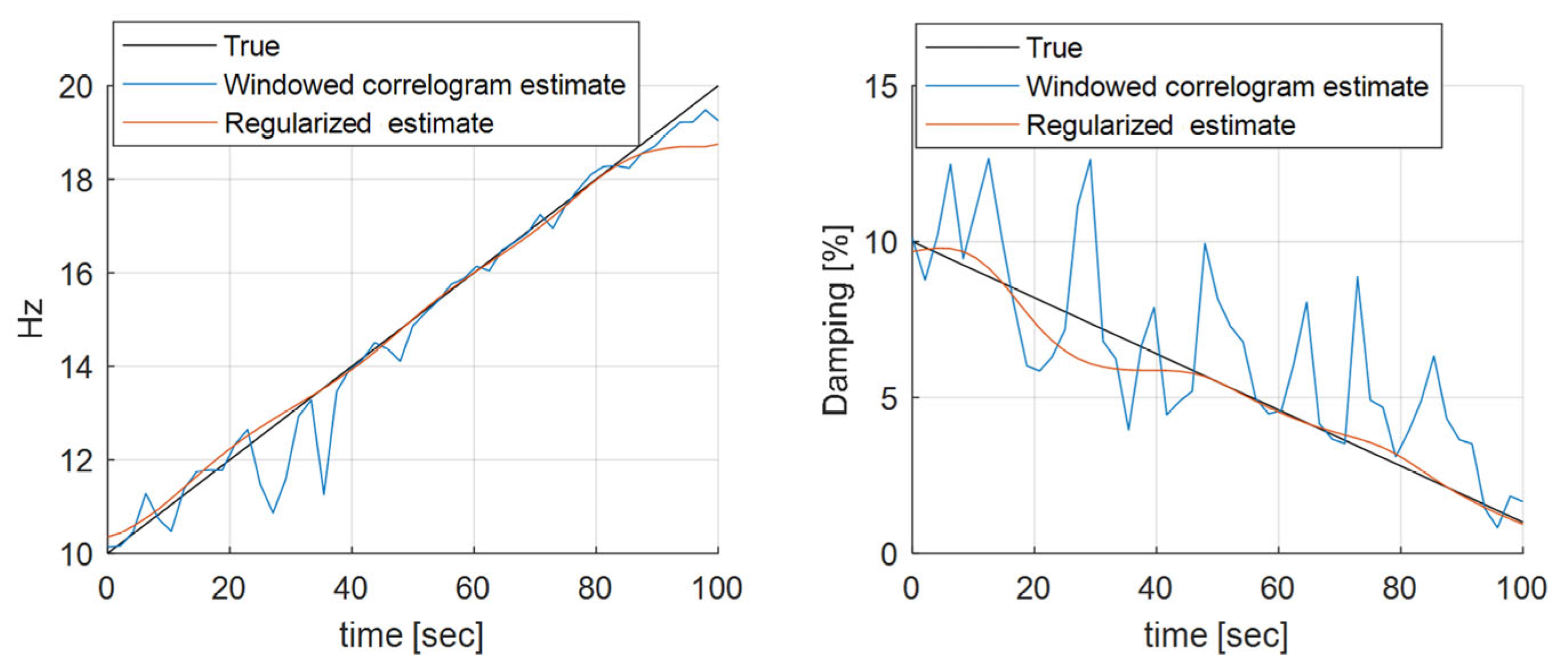
4. A Simulation Example
4.1. The Model
4.2. The Results
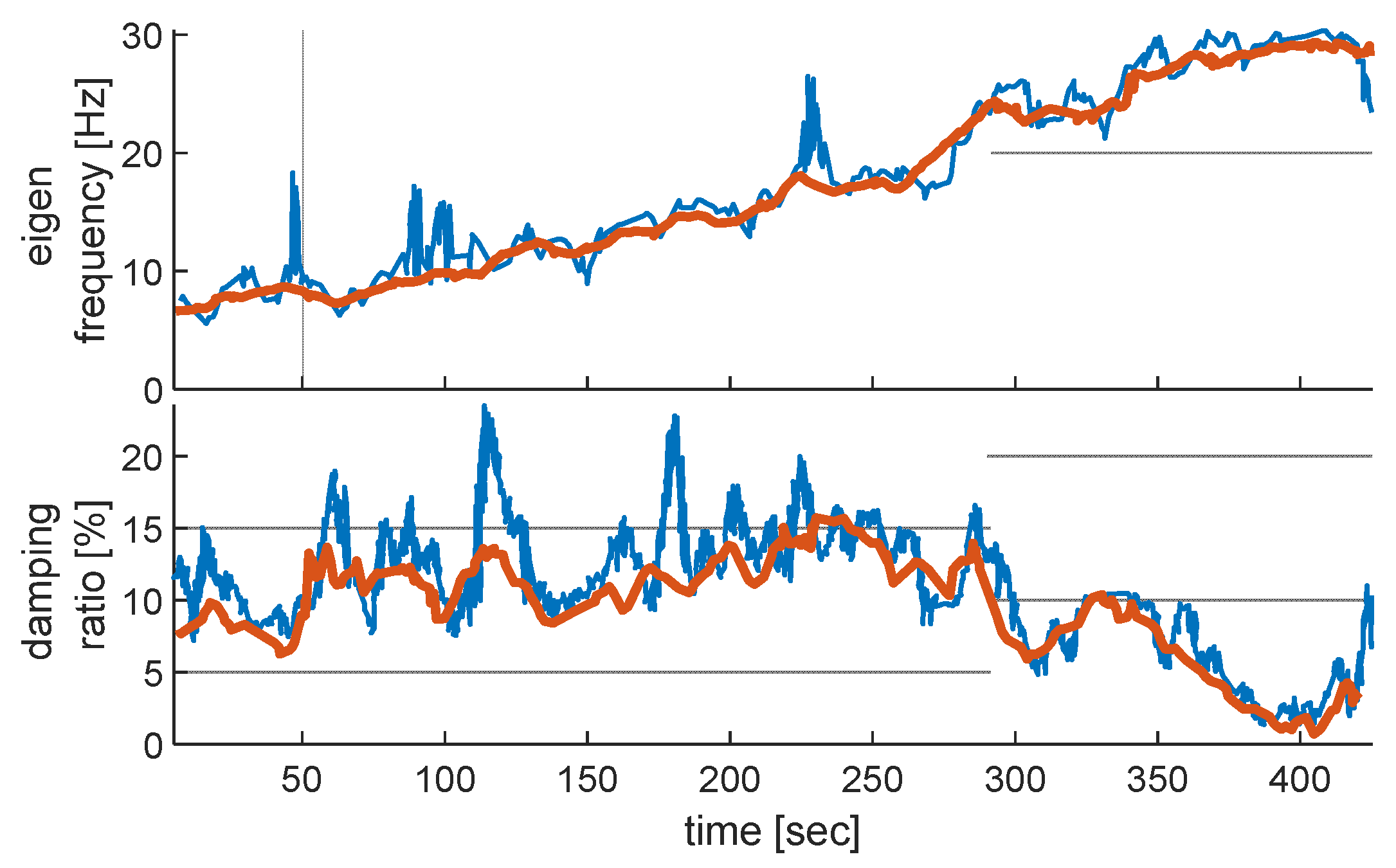
5. Measurement Examples
5.1. The Experiment
5.2. Results
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Peeters, B.; De Roeck, G. Stochastic system identification for operational modal analysis: A review. ASME J. Dyn. Syst. Meas. Control 2001, 123, 659–667. [Google Scholar] [CrossRef]
- Rainieri, C.; Fabbrocino, G. Operational Modal Analysis of Civil Engineering Structures; An Introduction and Guide for Applications; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Magalhães, F.; Cunh, Á. Explaining operational modal analysis with data from an arch bridge. Mech. Syst. Signal Process. 2011, 25, 1431–1450. [Google Scholar] [CrossRef]
- Brownjohn, J.; Magalhaes, F.; Caetano, E.; Cunha, A. Ambient vibration re-testing and operational modal analysis of the Humber Bridge. Eng. Struct. 2010, 32, 2003–2018. [Google Scholar] [CrossRef]
- Jing, W.; Hong, Z.; Gang, X.; Erbing, W.; Xiang, L. Operational modal analysis for automobile. In Future Communication, Computing, Control and Management; Lecture Notes in Electrical Engineering; Springer: Cham, Switzerland, 2012. [Google Scholar]
- Møller, N.; Gade, S. Application of Operational Modal Analysis on Car. In SAE 2003 Noise & Vibration Conference and Exhibition; SAE: Warrendale, PA, USA, 2003. [Google Scholar]
- Sichani, M.T.; Ahmadian, H. Identification of Railway Car Body Model Using Operational Modal Analysis. In Proceedings of the 8th International Railway Transportation Conference, Teheran, Iran, 8–9 November 2006. [Google Scholar]
- Morse, T.L.; Williamson, C.H.K. Prediction of vortex-induced vibration response by employing controlled motion. J. Fluid Mech. 2009, 634, 5–39. [Google Scholar] [CrossRef]
- Carberry, J.; Sheridan, J.; Rockwell, D. A Comparison of Forced and Freely Oscillating Cylinders. In Proceedings of the 14th Australasian Fluid Mechanics Conference, Adelaide, Australia, 9–14 December 2001. [Google Scholar]
- Edwins, D. Modal Testing: Theory, Practice and Applications, 2nd ed.; Research Studies Press: Brookline, MA, USA, 2000. [Google Scholar]
- Peeters, B.; Van der Auweraer, H.; Guillaume, P.; Leuridan, J. The PolyMAX Frequency-Domain Method: A New Standard for Modal Parameter Estimation? Shock Vib. 2004, 11, 359–409. [Google Scholar] [CrossRef]
- Calayır, Y.; Yetkin, M.; Erkek, H. Finite element model updating of masonry minarets by using operational modal analysis method. Structures 2021, 34, 3501–3507. [Google Scholar] [CrossRef]
- Reynders, E. System Identification Methods for (Operational) Modal Analysis: Review and Comparison. Arch. Comput. Methods Eng. 2012, 19, 51–124. [Google Scholar] [CrossRef]
- Lyons, R.G. Understanding Digital Signal Processing, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2010; ISBN 9780137027415. [Google Scholar]
- Priemer, R. Introductory Signal Processing; World Scientific: Singapore, 1991; ISBN 9971509199. [Google Scholar]
- Oktay, Signals and Systems: A MATLAB® Integrated Approach; CRC Press: Boca Raton, FL, USA, 2014.
- Bartlett, M.S. Periodogram Analysis and Continuous Spectra. Biometrika 1950, 37, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Welch, P.D. The use of Fast Fourier Transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Zhenkun, L.; Fuhua, M.; Cui, Y.; Mengjia, C. A novel method for Estimating Time of Flight of ultrasonic echoes through short-time Fourier transforms. Ultrasonics 2020, 103, 106104. [Google Scholar]
- Smith, L.; Smith, N.; Kodipaka, S.; Dahal, A.; Tang, B.; Ball, J.E.; Young, M. Effect of the short time fourier transform on the classification of complex-valued mobile signals. SPIE Int. Soc. Optical Eng. 2021, 11756, 2587664. [Google Scholar]
- Matyunina, Z.Y.; Rashevskaya, M. Application of the Short Time Fourier Transform for Calculating Electric Energy Losses under the Conditions of a Non-Sinusoidal Voltage. In Proceedings of the International Ural Conference on Electrical Power Engineering (UralCon), Chelyabinsk, Russia, 22–24 September 2020. [Google Scholar]
- Haiyan, Z.; Yuelong, J.; Baiyang, W.; Yuyun, K. Exercise fatigue diagnosis method based on short-time Fourier transform and convolutional neural network. Front. Physiol. 2022, 13, 965974. [Google Scholar]
- Jont, A.B. Short Time Spectral Analysis, Synthesis, and Modification by Discrete Fourier Transform. IEEE Trans. Acoust. Speech Signal Process. 1977, 25, 235–238. [Google Scholar]
- Peeters, B.; Karkle, P.; Pronin, M.; Van der Vorst, R. Operational Modal Analysis for in-line flutter assessment during wind tunnel testing. In Proceedings of the 15th International Forum on Aeroelasticity and Structural Dynamic, Paris, France, 26–30 June 2011. [Google Scholar]
- Tikhonov, N. On the stability of inverse problems (Об устoйчивoсти oбратных задач). Dokl. Akad. Nauk SSSR 1943, 39, 195–198. [Google Scholar]
- Nikolayevich, V.I. Arsenin, Solution of Ill-posed Problems; Winston & Sons: Washington, DC, USA, 1977; ISBN 0470991240. [Google Scholar]
- Pillonetto, G.; De Nicolao, G. A new kernel-based approach for linear system identification. Automatica 2010, 46, 81–93. [Google Scholar] [CrossRef]
- Buhmann, M.D. Radial Basis Functions: Theory and Implementations; Cambridge University Press: Cambridge, UK, 2009; ISBN 9780521101332. [Google Scholar]
- Rajagopal, V.C.; Ramaswamy, K.R.; Van der Hof, P.M. A regularized kernel-based method for learning a module in a dynamic network with correlated noise. In Proceedings of the IEEE Conference on Decision and Control, Jeju, Republic of Korea, 4–18 December 2020; Volume 2020, pp. 4348–4353. [Google Scholar]
- Ramaswamy, K.R.; Bottegal, G.; Van der Hof, P.M. Learning linear modules in a dynamic network using regularized kernel-based methods. Automatica 2021, 129, 109591. [Google Scholar] [CrossRef]
- Ramaswamy, K.R.; Csurcsia, P.Z.; Schoukens, J.; Van der Hof, P.M. A frequency domain approach for local module identification in dynamic networks. Automatica 2022, 142, 110370. [Google Scholar] [CrossRef]
- Pintelon, R.; Schoukens, J. System Identification: A Frequency Domain Approach; Wiley-IEEE Press: New Jersey, NJ, USA, 2012; ISBN 978-0470640371. [Google Scholar]
- Zadeh, L.A.; Ragazzini, J.R. Frequency analysis of variable networks. Proc. IRE 1950, 38, 291–299. [Google Scholar] [CrossRef]
- Zadeh, L.A. A general theory of linear signal transmission systems. J. Frankl. Inst. 1952, 253, 293–312. [Google Scholar] [CrossRef]
- Csurcsia, P.Z.; Schoukens, J.; Kollár, I. Identification of time-varying systems using a two-dimensional B-spline algorithm. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference, Graz, Austria, 13–16 May 2012. [Google Scholar]
- Blanco Alvarez, M.; Csurcsia, P.Z.; Peeters, B.; Janssens, K.; Desmet, W. Nonlinearity assessment of MIMO electroacoustic systems on direct field environmental acoustic testing. In Proceedings of the ISMA 2018—International Conference on Noise and Vibration Engineering and USD 2018—International Conference on Uncertainty in Structural Dynamics, Leuven, Belgium, 17–19 September 2018. [Google Scholar]
- Csurcsia, P.Z.; Peeters, B.; Schoukens, J. The best linear approximation of MIMO systems: Simplified nonlinearity assessment using a toolbox. In Proceedings of the ISMA 2020—International Conference on Noise and Vibration Engineering and USD 2020—International Conference on Uncertainty in Structural Dynamics, Leuven, Belgium, 9–11 September 2020. [Google Scholar]
- Rasmussen, E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; ISBN 026218253X. [Google Scholar]
- Csurcsia, P.Z.; Peeters, B.; Schoukens, J. Tracking the modal parameters of time-varying structures by regularized nonparametric estimation and operational modal analysis. In Proceedings of the 8th IOMAC—International Operational Modal Analysis Conference, Copenhagen, Denmark, 13–15 May 2019; pp. 511–523. [Google Scholar]
- Chen, T.; Ohlsson, H.; Ljung, L. On the estimation of transfer functions, regularizations and Gaussian processes—Revisited. Automatica 2012, 48, 1525–1535. [Google Scholar] [CrossRef]
- Pillonetto, G.; Dinuzzo, F.; Chen, T.; De Nicolao, G.; Ljung, L. Kernel methods in system identification, machine learning and function estimation: A survey. Automatica 2014, 50, 657–682. [Google Scholar] [CrossRef]
- Chen, T.; Ljung, L. Implementation of algorithms for tuning parameters in regularized least squares problems in system identification. Automatica 2013, 49, 2213–2220. [Google Scholar] [CrossRef]
- Marconato, A.; Maarten, S. Tuning the hyperparameters of the filter-based regularization method for impulse response estimation. IFAC-PapersOnLine 2017, 50, 12841–12846. [Google Scholar] [CrossRef]
- Csurcsia, P.Z.; Siddiqi, M.F.; Runacres, M.C.; De Troyer, T. Unsteady Aerodynamic Lift Force on a Pitching Wing: Experimental Measurement and Data Processing. Vibration 2023, 6, 29–44. [Google Scholar] [CrossRef]
- Csurcsia, P.Z.; Peeters, B.; Schoukens, J. The Best Linear Approximation of MIMO Systems: First Results on Simplified Nonlinearity Assessment. In Conference Proceedings of the Society for Experimental Mechanics Series; Springer: Cham, Switzerland, 2020; pp. 53–64. [Google Scholar]
- Tavares, A.; Drapier, D.; Di Lorenzo, E.; Csurcsia, P.Z.; De Troyer, T.; Desmet, W.; Gryllias, K. Automated Operational Modal Analysis for the Monitoring of a Wind Turbine Blade. Structural Health Monitoring 2023: Designing SHM for Sustainability, Maintainability, and Reliability. In Proceedings of the 14th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 12–14 September 2023; pp. 2759–2766. [Google Scholar]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csurcsia, P.Z.; Ajmal, M.; De Troyer, T. A Nonparametric Regularization for Spectrum Estimation of Time-Varying Output-Only Measurements. Vibration 2024, 7, 161-176. https://doi.org/10.3390/vibration7010009
Csurcsia PZ, Ajmal M, De Troyer T. A Nonparametric Regularization for Spectrum Estimation of Time-Varying Output-Only Measurements. Vibration. 2024; 7(1):161-176. https://doi.org/10.3390/vibration7010009
Chicago/Turabian StyleCsurcsia, Péter Zoltán, Muhammad Ajmal, and Tim De Troyer. 2024. "A Nonparametric Regularization for Spectrum Estimation of Time-Varying Output-Only Measurements" Vibration 7, no. 1: 161-176. https://doi.org/10.3390/vibration7010009
APA StyleCsurcsia, P. Z., Ajmal, M., & De Troyer, T. (2024). A Nonparametric Regularization for Spectrum Estimation of Time-Varying Output-Only Measurements. Vibration, 7(1), 161-176. https://doi.org/10.3390/vibration7010009