Effect of Soil Moisture Content and End-Effector Speed on Pick-up Force and Lump Damage for Seedling Transplanting



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
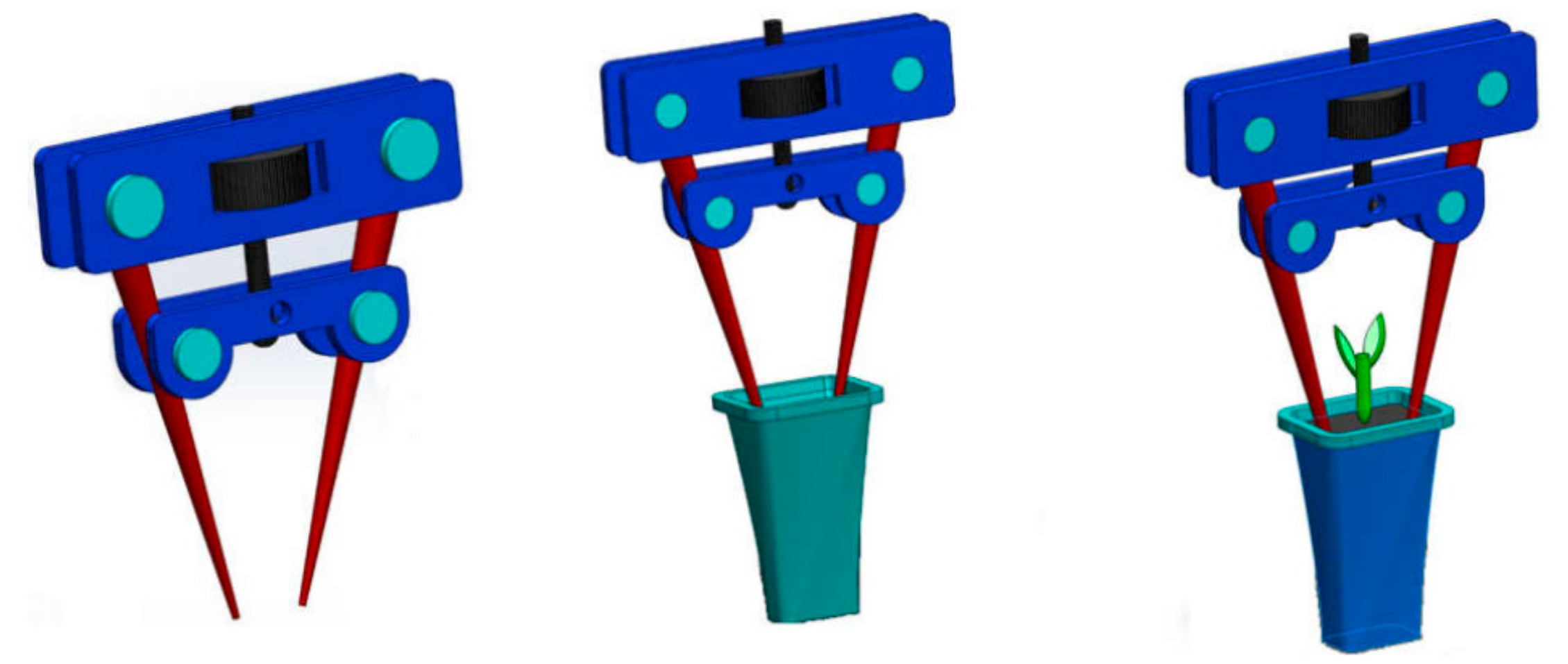
2.1. Principle of Force Gripping Seedling Lump Damage
2.2. Study Area Characterization
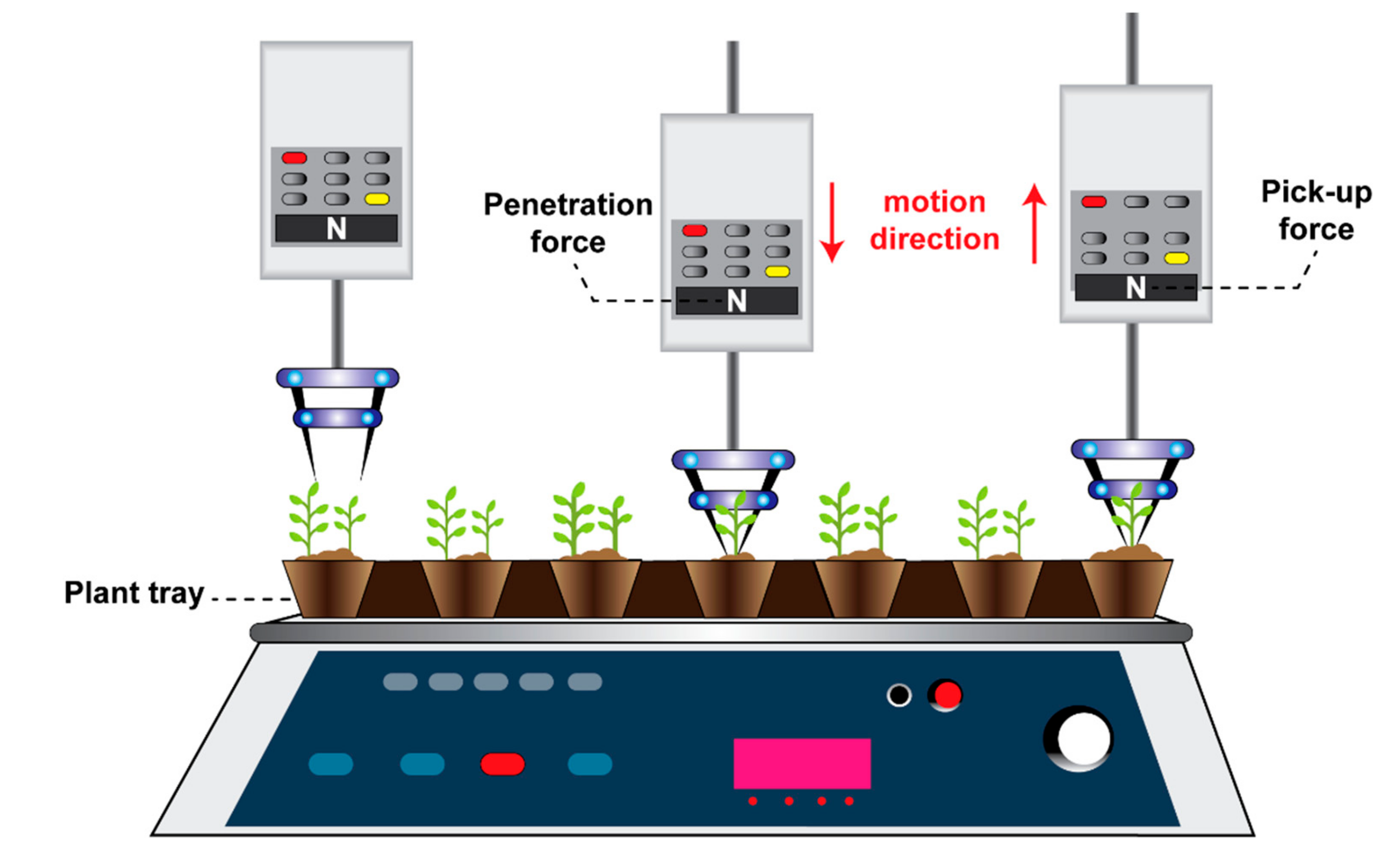
2.3. Force Application on the Seedling Soil Lump
2.4. The Water Moisture Contents Measurements
2.5. Test of Seedling Lump Resistance Using the Texture Analyzer Test
2.6. Test of the Simulated Picking up Seedlings Using an End-Effector
2.7. SCANCO X-ray Tomography Facility Experiment
2.8. Damage Investigation
2.9. Statistical Analysis
3. Results
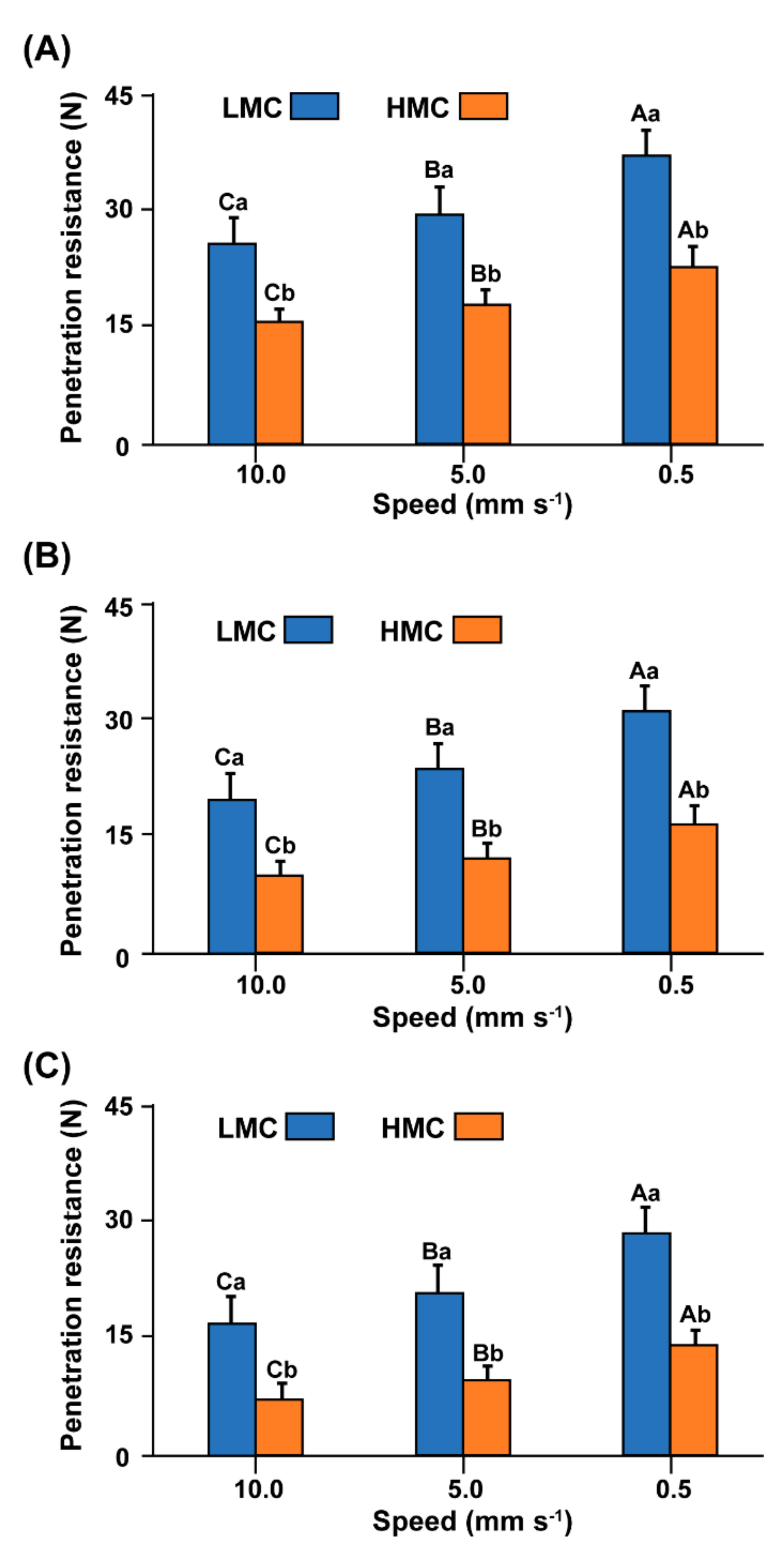
3.1. The Penetration Force Resistance as a Function of SMC, Penetration Speed S and Force F
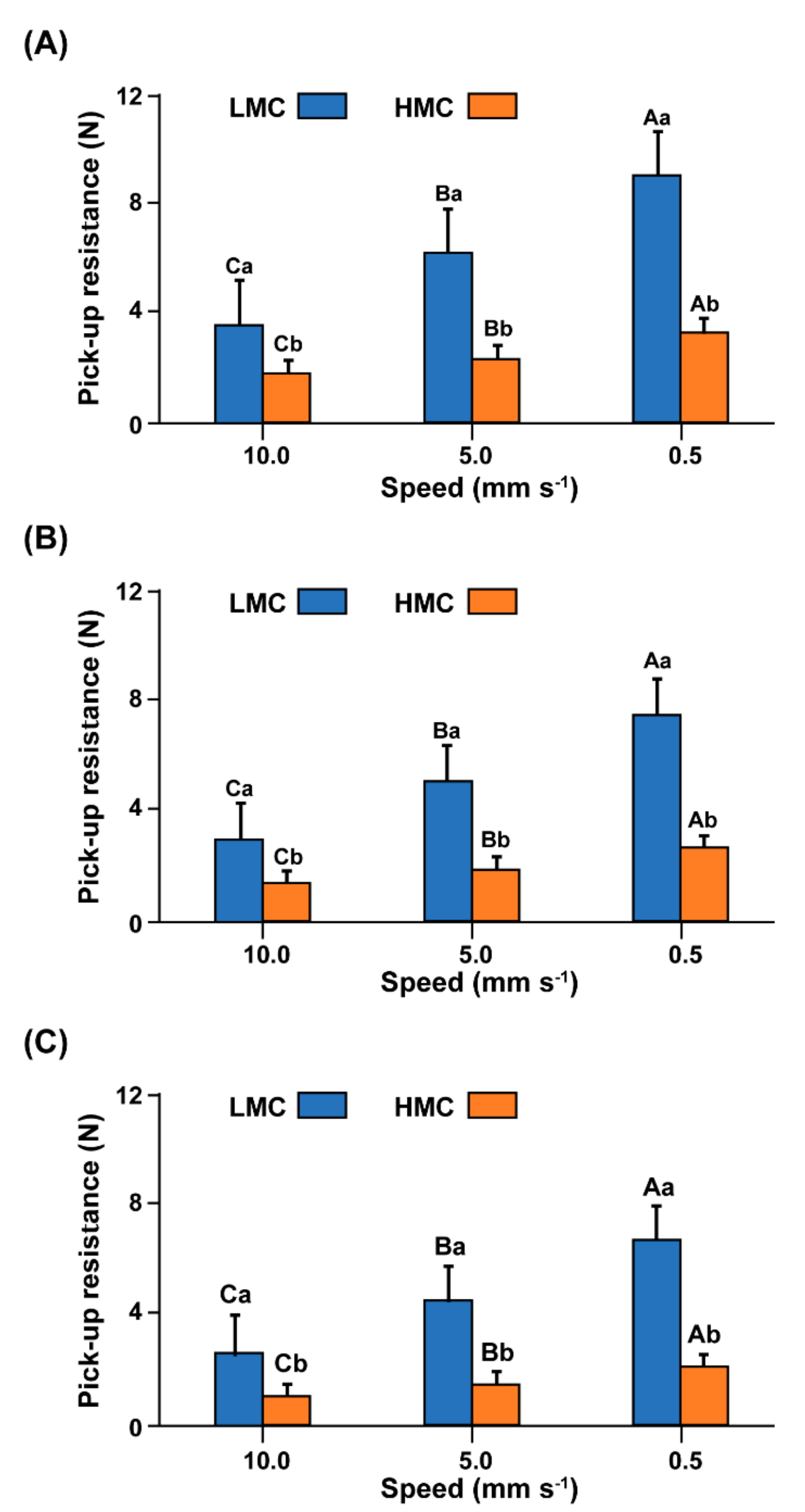
3.2. The Pick-up Force Resistance as a Function of SMC, S and F
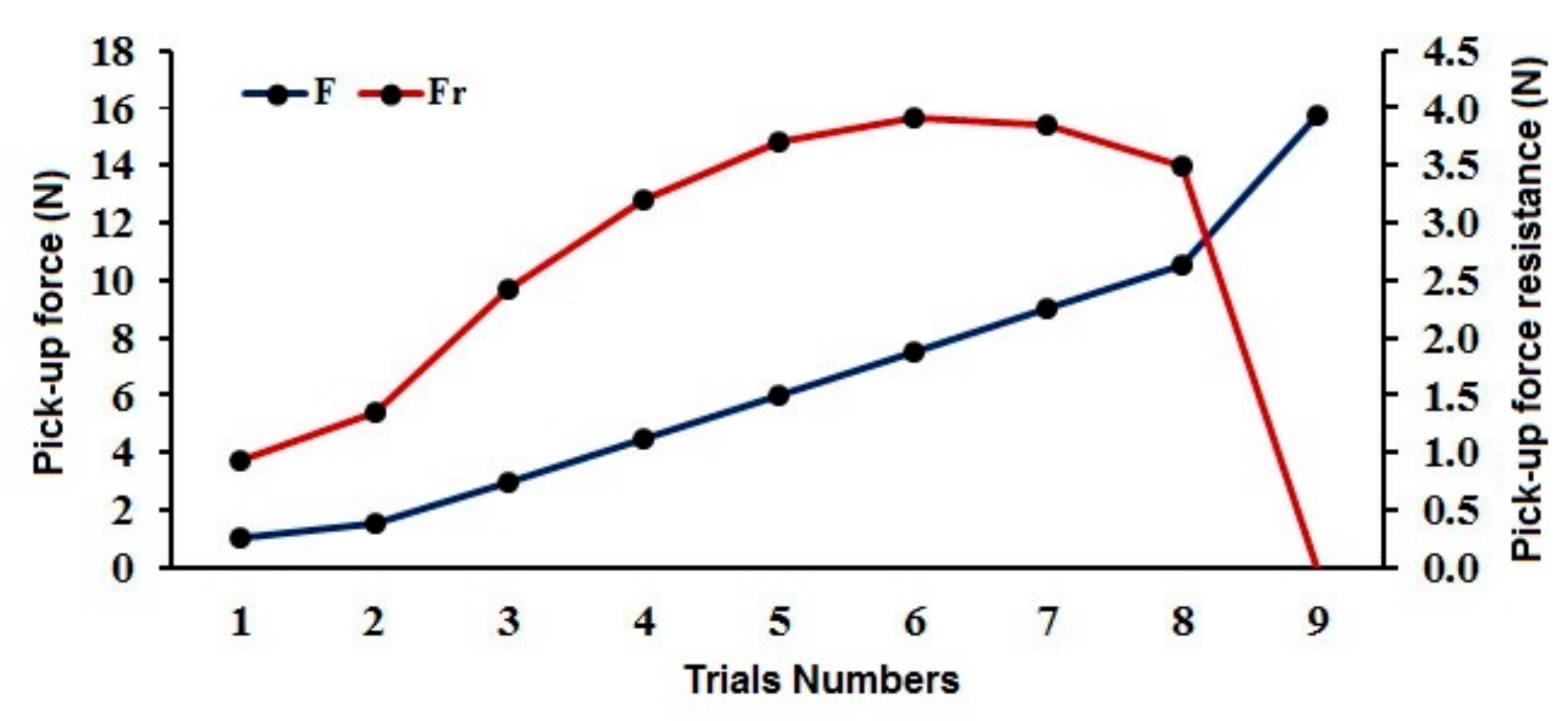
3.3. The Pick-up Force and Pick-up Resistance
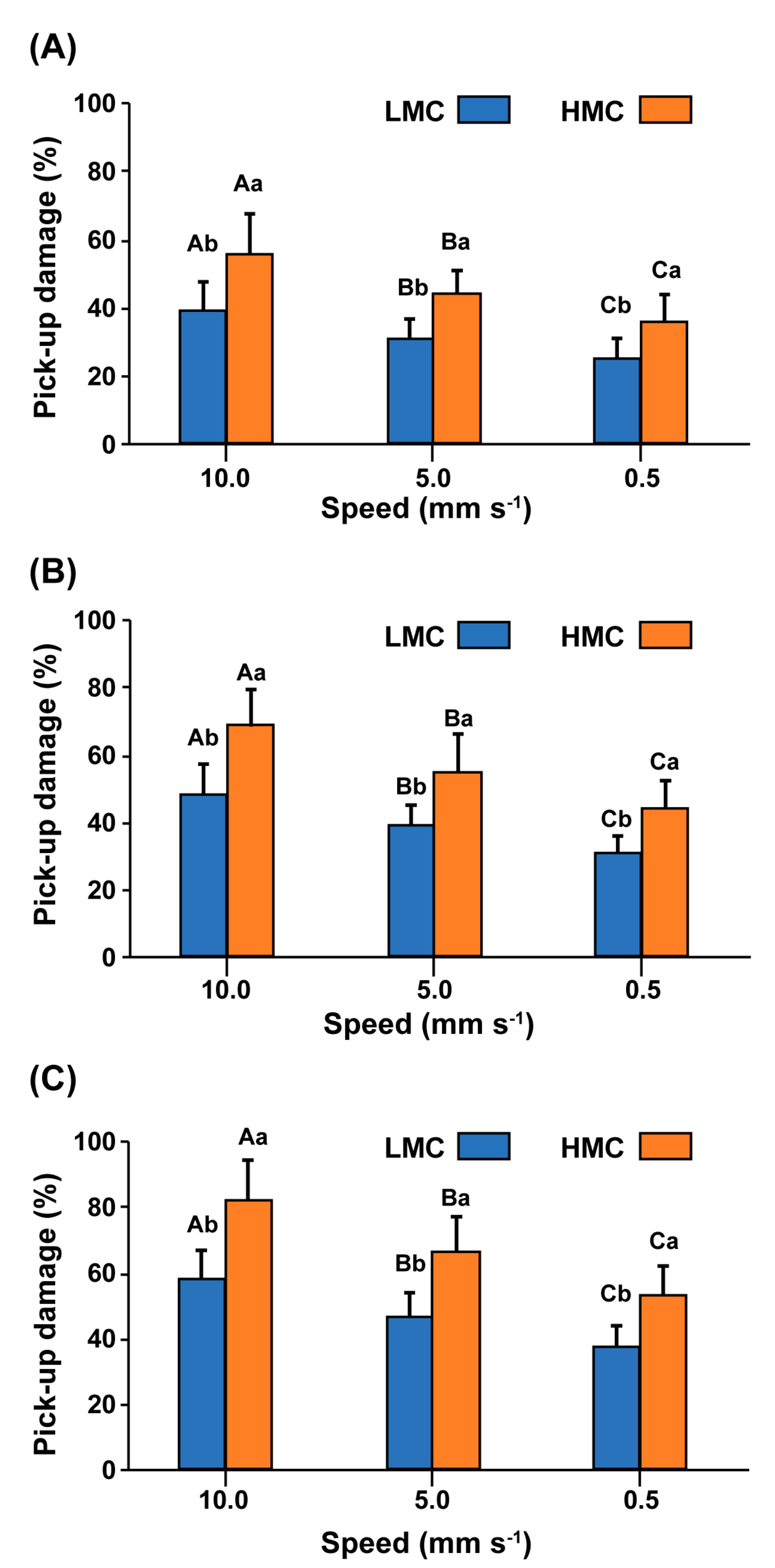
3.4. The Pick-up Damage as a Function of SMC, S and F
3.5. The Damage as a Function of the Force Balance
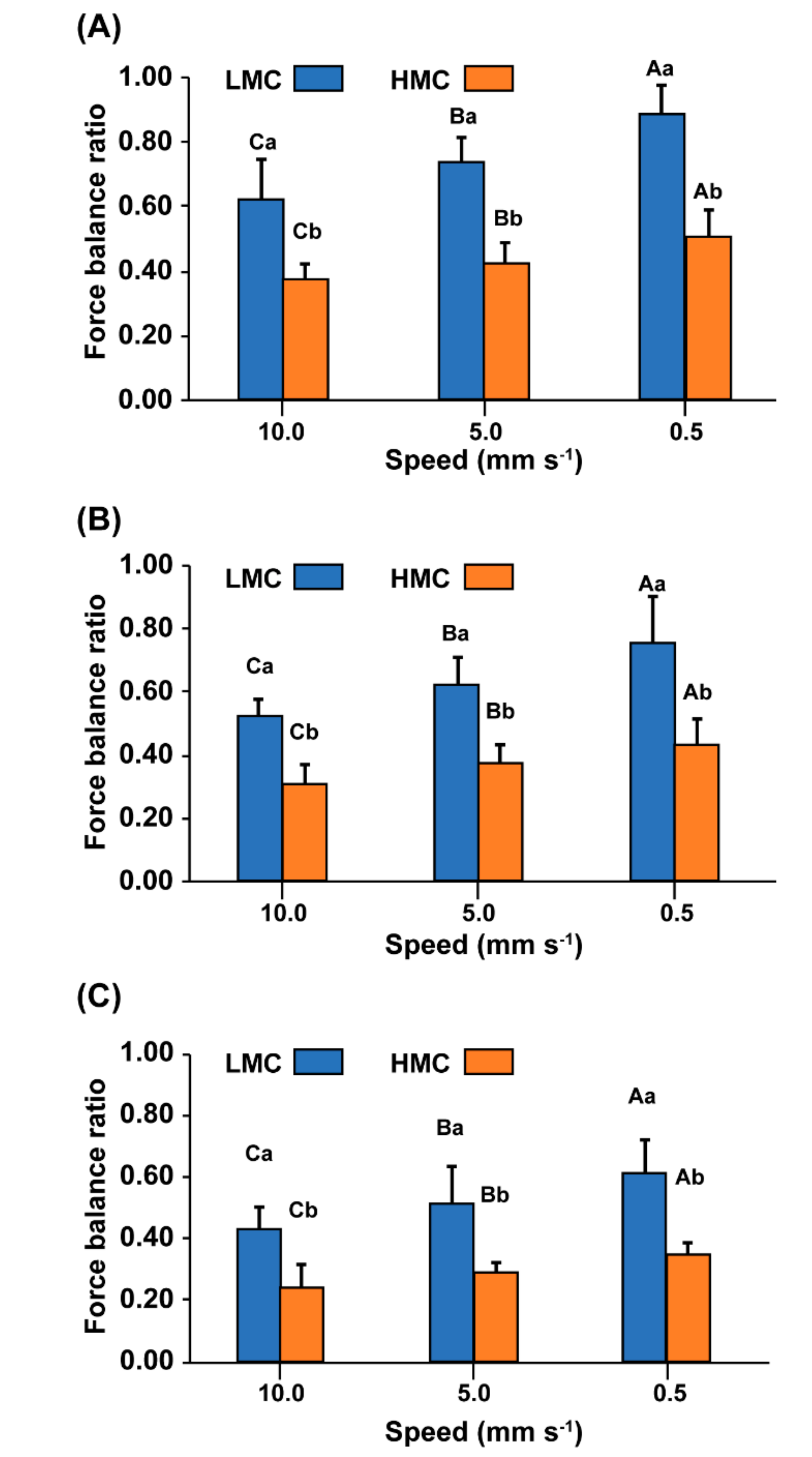
3.6. The Force Balance Ratio as a Function of SMC, S and F
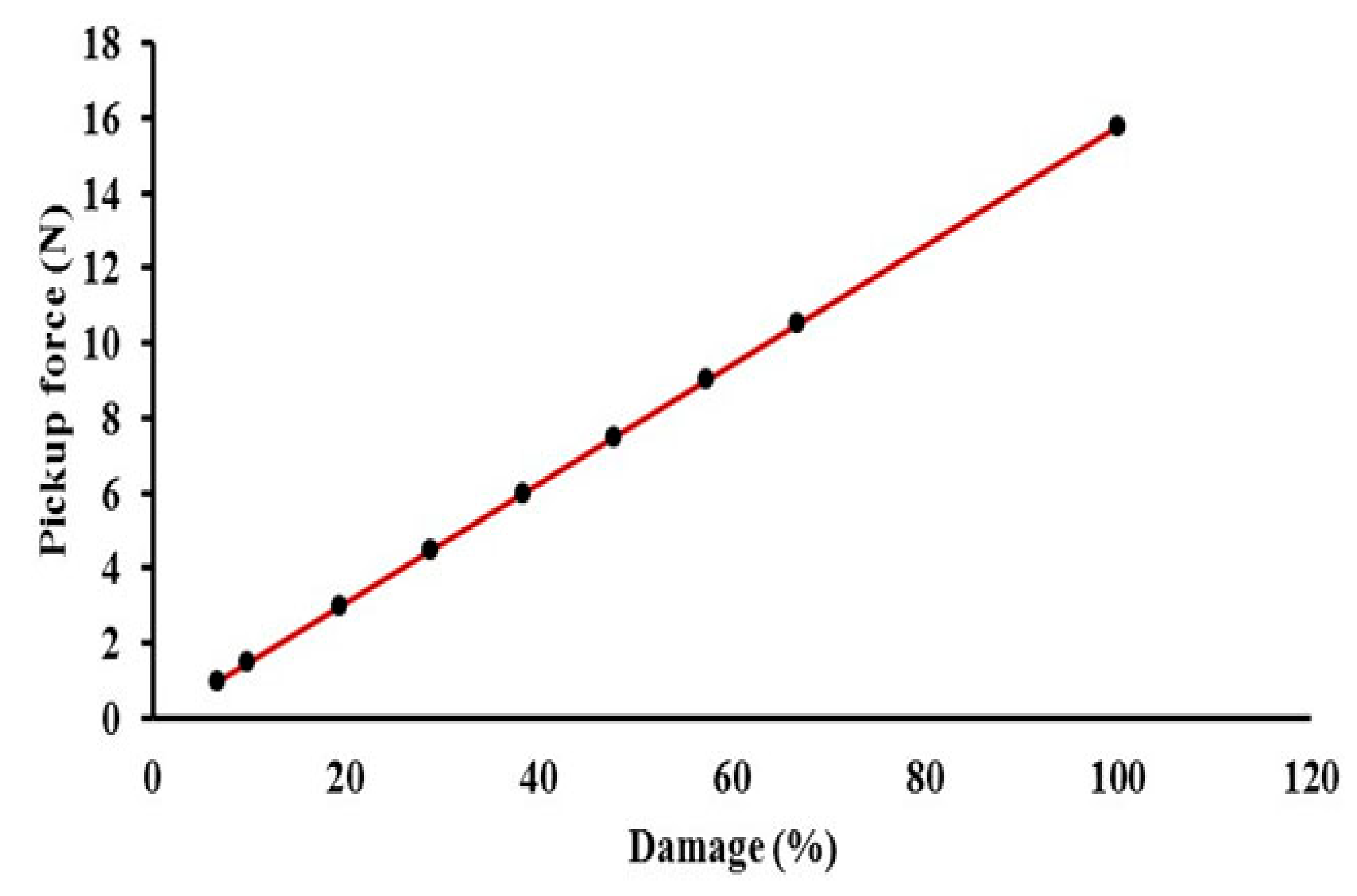
3.7. The Damage as a Function of the Pick-up Force
3.8. Damage Investigation by the X-ray CT System
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Nye, P.H.; Tinker, P.B. Solute Movement in the Soil-Root System; Univ of California Press: Burkley, CA, USA, 1977; Volume 4. [Google Scholar]
- Xiaoliang, L.; Qiyun, L. Development tendency of bowl-rear transplanting mechanization. J. Shandong Univ. Technol. Nat. Sci. Ed. 2003, 17, 108–110. [Google Scholar]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick–up device for vegetable transplanters. Trans. ASAE 2002, 45, 1–13. [Google Scholar]
- Jin, X.; Li, D.; Ma, H.; Ji, J.; Zhao, K.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef] [Green Version]
- Wei, L.; Jizhan, L. Review of end-effectors in tray seedlings transplanting robot. J. Agric. Mech. Res. 2013, 7, 6–10. [Google Scholar]
- Han, L.; Mao, H.; Hu, J.; Miao, X.; Tian, K.; Yang, X. Experiment on mechanical property of seedling pot for automatic transplanter. Trans. Chin. Soc. Agric. Eng. 2013, 29, 24–29. [Google Scholar]
- Xiaohua, M.; Hanping, M.; Lühua, H. Analysis of influencing factors on force of picking plug seedlings and pressure resistance of plug seedlings. Trans. Chin. Soc. Agric. Mach. 2013, 44, 27–32. [Google Scholar]
- Jiannong, S.; Ping, W.; Wenjun, W.; Lichen, W. Experimental research on tensile strength of rice seedlings and force of pulling out seedlings from trays. Trans. Chin. Soc. Agric. Eng. 2003, 6, 10–13. [Google Scholar]
- Ren, W.; Che, Z.; Liu, J. Experiment on effect of paddy mud on adhesion property of farm paper mulch. Trans. Chin. Soc. Agric. Eng. 2011, 27, 129–133. [Google Scholar]
- Yang, Y.; Ting, K.C.; Giacomelli, G.A. Factors Affecting Performance of Sliding-Needles Gripper During Robotic Transplanting of Seedlings. Appl. Eng. Agric. 1991, 7, 493–498. [Google Scholar] [CrossRef]
- Hadjian, A.; Luco, J.; Tsai, N. Soil-structure interaction: continuum or finite element? Nucl. Eng. Des. 1974, 31, 151–167. [Google Scholar] [CrossRef]
- Kumar, G.P.; Raheman, H. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings. Biosyst. Eng. 2011, 110, 189–197. [Google Scholar] [CrossRef]
- Thomas, E.V. Development of a mechanism for transplanting rice seedlings. Mech. Mach. Theory 2002, 37, 395–410. [Google Scholar] [CrossRef]
- Dupuy, L.; Gregory, P.J.; Bengough, A.G. Root growth models: towards a new generation of continuous approaches. J. Exp. Bot. 2010, 61, 2131–2143. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Cai, Y. Continuum Damage Mechanics and Numerical Applications; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Ji, W.; Luo, D.; Li, J.; Yang, J.; Zhao, D. Compliance grasp force control for end-effector of fruit-vegetable picking robot. Trans. Chin. Soc. Agric. Eng. 2014, 30, 19–26. [Google Scholar]
- Abel, J. In-FieldRobotic Leaf Grasping and Automated Crop Spectroscopy; Carnegie Mellon University: Pittsburgh, PA, USA, 2018. [Google Scholar]
- Yang, Q.; Jin, Y.; Qian, S.; Bao, G. Research on end-effector of apple picking based on new flexible pneumatic actuator. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2010, 41, 154–204. [Google Scholar]
- Luhua, S.; Hegie, A.; Suzuki, N.; Shulaev, E.; Luo, X.; Cenariu, D.; Ma, V.; Kao, S.; Lim, J.; Gunay, M.B.; et al. Linking genes of unknown function with abiotic stress responses by high-throughput phenotype screening. Physiol. Plant. 2013, 148, 322–333. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, J.; Zhang, W.; Zhao, X.; Liu, W. Kinematic analysis and performance experiment of cantilever cup vegetable transplanter. Trans. Chin. Soc. Agric. Eng. 2011, 27, 21–25. [Google Scholar]
- Wang, W.; Dou, W.; Wang, C.; Zhao, S.; Zhao, M. Parameter analysis of the planting process of 2ZT-2 beet transplanter. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2009, 40, 69–73. [Google Scholar]
- Xin, L.; Lv, Z.; Wang, W.; Zhou, M.; Zhao, Y. Optimal Design and Development of a Double-Crank Potted Rice Seedling Transplanting Mechanism. Trans. ASABE 2017, 60, 31–40. [Google Scholar] [CrossRef]
- Gui-wen1a, L.; La-zhen1a, Q.; Yun-mei1a, Z.; Jin-xiang1b, C.; Chao-long1a, Z.; Zhen-wei1a, D. Experiment and analysis on mechanic properties in pulling of floating seedlings of cotton. J. Hunan Agric. Univ. (Nat. Sci.) 2013, 2, 217–220. [Google Scholar]
- Choi, W.C.; Kim, D.C.; Ryu, I.; Kim, K.U. Development of a seedling pick–up device for vegetable transplanters. Trans. ASAE 2002, 45, 13–19. [Google Scholar] [CrossRef]
- Heinrichs, E.; Medrano, F.; Rapusas, H. Genetic Evaluation for Insect Resistance in Rice; International Rice Research Institute: Manila, Philippines, 1985. [Google Scholar]
- Kang, D.H.; Kim, D.E.; Lee, G.I.; Kim, Y.H.; Lee, H.J.; Min, Y.B. Development of a vegetable transplanting robot. J. Biosyst. Eng. 2012, 37, 201–208. [Google Scholar] [CrossRef]
- Simonton, W. Robotic end effector for handling greenhouse plant material. Trans. ASAE 1991, 34, 2615–2621. [Google Scholar] [CrossRef]
- Hu, J.; Yan, X.; Ma, J.; Qi, C.; Francis, K.; Mao, H. Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot. Comput. Electron. Agric. 2014, 107, 64–72. [Google Scholar] [CrossRef]
- Mao, H.; Han, L.; Hu, J.; Kumi, F. Development of a pincette-type pick-up device for automatic transplanting of greenhouse seedlings. Appl. Eng. Agric. 2014, 30, 547–556. [Google Scholar]
- Guomin, S.G.W.X.H.; Xiaojun, Z.T.W.C.Q. Design of the End-effector for Plug Seedlings Transplanter and Analysis on Virtual Prototype. Trans. Chin. Soc. Agric. Mach. 2010, 10, 48–53. [Google Scholar]
- Ting, K.; Giacomelli, G.; Ling, P. Workability and productivity of robotic plug transplanting workcell. In Vitro Cell. Dev. Biol.-Plant 1992, 28, 5–10. [Google Scholar] [CrossRef]
- Xin, J.; Kaixuan, Z.; Jiangtao, J.; Hao, M.; Jing, P.; Zhaomei, Q. Design and experiment of automatic transplanting device for potted tomato seedlings. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 1045–1054. [Google Scholar] [CrossRef]
- Liang, X.; Cai, Y. Design and Analysis on a Scalability Mechanism for Plug Seedling Transplanting and Separating. In Computer Science and Engineering Technology (CSET2015), Medical Science and Biological Engineering (MSBE2015): Proceedings of the 2015 International Conference on CSET & MSBE; World Scientific Publishing Company: Singapore, 2015; pp. 41–46. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H. Experiment and analysis of impact factors for soil matrix intact rate of manipulator for picking-up plug seedlings. Trans. Chin. Soc. Agric. Eng. 2015, 31, 65–71. [Google Scholar]
- Jin, X.; Li, S.J.; Yang, X.J.; Wu, J.M.; Liu, Z.J.; Liu, H.K. Developments in research on seedling auto-picking device of vegetable transplanter. Appl. Mech. Mater. 2013, 375–379. [Google Scholar] [CrossRef]
- Souch, C.; Martin, P.J.; Stephens, W.; Spoor, G. Effects of soil compaction and mechanical damage at harvest on growth and biomass production of short rotation coppice willow. Plant Soil 2004, 263, 173–182. [Google Scholar] [CrossRef] [Green Version]
- Chancellor, W.J. Advances in soil-plant dynamics. In Advances in Soil Dynamics Volume 1; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 1994; pp. 255–280. [Google Scholar]
- Perret, J.; Al-Belushi, M.; Deadman, M. Non-destructive visualization and quantification of roots using computed tomography. Soil Biol. Biochem. 2007, 39, 391–399. [Google Scholar] [CrossRef]
- Mairhofer, S.; Zappala, S.; Tracy, S.R.; Sturrock, C.; Bennett, M.; Mooney, S.J.; Pridmore, T. RooTrak: Automated recovery of three-dimensional plant root architecture in soil from X-ray microcomputed tomography images using visual tracking. Plant Physiol. 2012, 158, 561–569. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, S.; Liu, J. Effect of Soil Moisture Content and End-Effector Speed on Pick-up Force and Lump Damage for Seedling Transplanting. AgriEngineering 2019, 1, 343-355. https://doi.org/10.3390/agriengineering1030026
Mohamed S, Liu J. Effect of Soil Moisture Content and End-Effector Speed on Pick-up Force and Lump Damage for Seedling Transplanting. AgriEngineering. 2019; 1(3):343-355. https://doi.org/10.3390/agriengineering1030026
Chicago/Turabian StyleMohamed, Sami, and Jizhan Liu. 2019. "Effect of Soil Moisture Content and End-Effector Speed on Pick-up Force and Lump Damage for Seedling Transplanting" AgriEngineering 1, no. 3: 343-355. https://doi.org/10.3390/agriengineering1030026
APA StyleMohamed, S., & Liu, J. (2019). Effect of Soil Moisture Content and End-Effector Speed on Pick-up Force and Lump Damage for Seedling Transplanting. AgriEngineering, 1(3), 343-355. https://doi.org/10.3390/agriengineering1030026