1. Introduction
In modern engineering, the finite element (FE) technique [
1,
2] is increasingly used to exploit the feasibility of very large and complex structures. Tokamaks, such as ITER [
3] now under construction and DEMO [
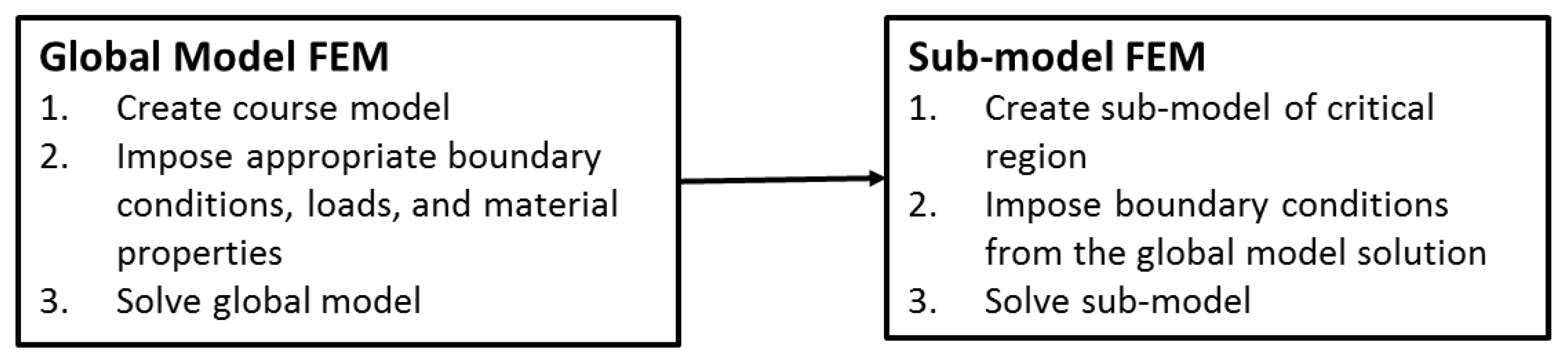
4], the proposed next DEMO-nstration fusion power plant, are typical examples of such very large and complex structures involving extremely hard technological issues in mechanical, thermo-fluid dynamic, neutronic, and electromagnetic fields. Due to this fact, these projects need an enormous amount of computer-aided engineering. This engineering work often requires the optimization of single small parts or sub-components of the whole structure. Design optimization can uniquely be achieved by iterating and repeating a slightly modified FE model to identify the best design parameters of the components by analyzing their structural performance in a given situation. As, in EM analyses, the load conditions at the component boundaries are greatly influenced by the presence of the whole structure, each iteration analysis would require a part of the structure, or the whole structure itself, to be included in the FE model, implying a complete remodeling of the whole structure at each iteration. Furthermore, the mesh refinement of the sub-model needed to achieve the required accuracy in the numerical solutions would incur very high, often prohibitive, costs both in terms of modeling and computing time. To overcome such limitations, the sub-modeling approach [
5,
6] is often used as it allows more accurate results to be obtained in a particular region of the FE model by transferring the boundary conditions from a primary (coarse) to a secondary (refined) mesh. The main sub-modeling routines can be summarized into two major steps as represented in the flowchart in
Figure 1.
This strategy has been applied in different engineering fields, including structural mechanics, electromagnetics, thermos-fluid dynamics, and so on [
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. In particular, when dealing with commercial tools, such as ANSYS EMAG, sub-modeling has mainly been used in the presence of finite elements with a magnetic nodal formulation (i.e., SOLID97) for which a DOF mapping to the boundary of the sub-model is feasible, as performed in [
9,
10].
The aim of this study is to analyze the possibility of extending the sub-modeling procedure to the ANSYS EM elements S236/S237 that are based on an edge-flux formulation and are much more efficient than those based on the nodal formulation in the non-linear analyses (such as those required for DEMO plant which make extensive use of ferromagnetic material, e.g., EUROFER97 [
20]).
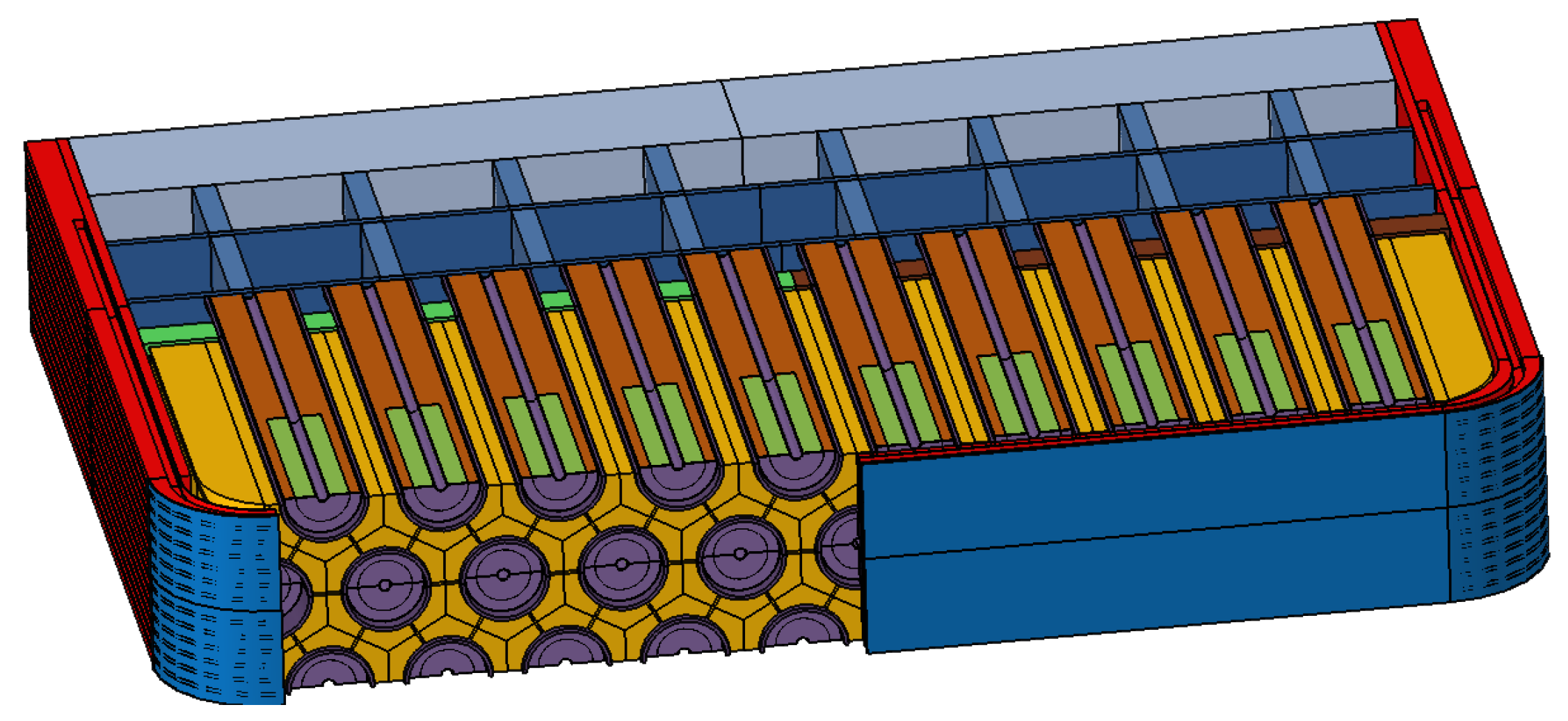
The sub-modeling feasibility is studied by applying the rigid boundary condition method. This method consists of running a global “coarse” mesh, including all the conducting structures that can have some impact on the component under investigation and inputting the obtained results on the detailed sub-model of the structure of interest as time-varying boundary conditions. The procedure was tested on the breeding blanket segment structure, taking as reference a DEMO2017 [
21] toroidal sector of 22.5 degrees, the HCPB concept with its complex internal structure made by pins [
22] (see
Figure 2), and a fast upper plasma vertical displacement event (UVDE) with a current quench (CQ) time of 74 ms carried out with CarMa0NL [
23].
Four different models, described in detail in
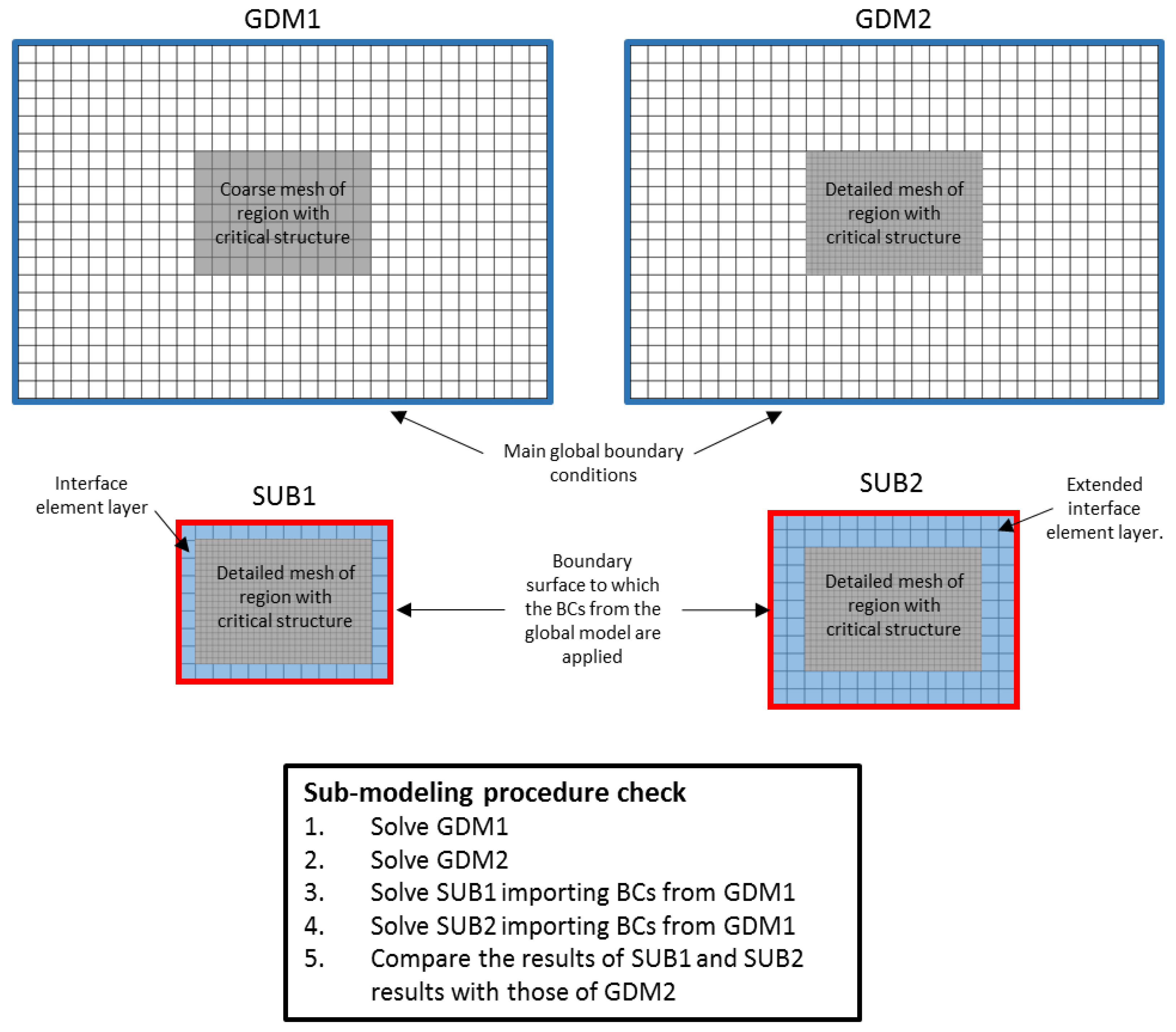
Section 2, were implemented:
GDM1: global DEMO model of the whole sector with a coarse mesh used to extract the boundary conditions for the sub-model;
GDM2: as GDM1 but with the detailed mesh integrated into it;
SUB1: sub-model created using the detailed mesh and a “reasonable” element layer of the coarse mesh of GDM2;
SUB2: like SUB1 but using an extended section of the coarse mesh (that also includes some excitations).
The reliability test of the sub-modeling procedure was carried out as follows:
- a)
The transient non-linear EM analysis of the sub-model was performed, assuming as time-dependent loading conditions at its boundary nodes the DOF values obtained at these nodes from the EM analysis under the same EM transient of GDM1, which does not contain the detailed region;
- b)
The results obtained in the detailed region in the sub-model analysis were compared with the results obtained in the same region using the model, including the DEMO sector and the detailed region itself;
- c)
A comparison between the results obtained with the two sub-models was made to investigate the possibility of extending the procedure by also applying internal excitations and to reduce the error due to sub-model perturbation of the boundary conditions.
A schematic representation of the implemented FEM models and the sub-modeling procedure check is shown in
Figure 3.
2. Model Descriptions
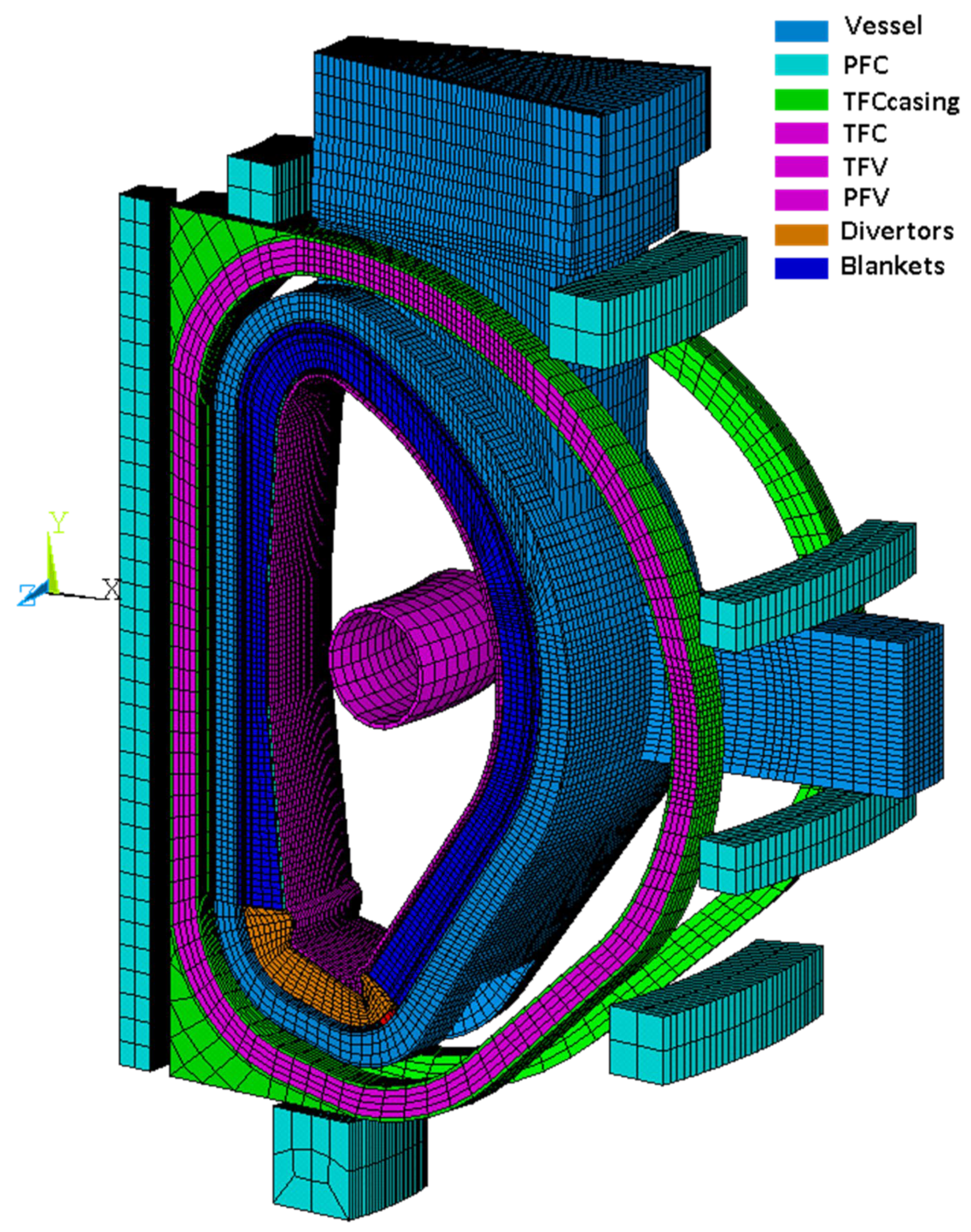
As previously introduced, the study was conducted using two DEMO global models: the first one, GDM1, was modeled with enough accuracy to allow quite good precision in the evaluation of the EM loads of large components, such as the vessel, divertors, and blanket segments. In particular, the vessel, upper and equatorial ports, upper and equatorial port plugs, and the main components of the back supporting structure (BSS) of all blanket segments (the back plate, side walls, toroidal and poloidal ribs, and manifold) were modeled with a good degree of accuracy, while the first wall (FW) and the breeding zone (BZ), whose complete detail would have required an extremely high number of elements, were modeled using homogenized structures as made, for example, in [
24]. A view of all the conductive structures and BB segments is shown in
Figure 4 and
Figure 5, respectively.
The second global model, GDM2, is identical to the first one for most of the mesh, but a segment of about 1.3 m height of the FW and the BZ, located in the equatorial region of the central outboard blanket, was remeshed to best reproduce, inside this limited region, the real geometric characteristics of the inner sub-components of the FW and BZ (cooling channels and pins) that had been roughly considered in the first model. The two sub-models (SUB1 and SUB2) were extracted from this global model (see
Figure 6 and
Figure 7).
2.1. Element Type and Boundary Conditions
All models were developed using the ANSYS element S236, which is a 3-D 20-node element that has static and transient, linear and non-linear, EM modeling capability [
25]. The element has magnetic and electric degrees of freedom (DOF). Magnetic degrees of freedom are based on the edge-flux formulation. The edge-flux (AZ) degree of freedom is defined as the line integral of the magnetic vector potential on the considered edge from the lower corner node number to the higher corner node number. It is defined at the mid-side nodes only (i.e., there are no magnetic degrees of freedom associated with the corner nodes). The analysis is driven by the current density applied as an element body load. The models use two element types: type 1 for non-conducting and type 2 for conducting materials (see
Table 1 for a list of the used key options).
The following boundary conditions were applied to the global models:
- −
Each isolated conducting component was electrically grounded fixing the VOLT DOF on one node to zero;
- −
Cyclic boundary conditions for the VOLT DOF are imposed using the APDL command CPCYC on the master and slave sections (toroidal boundary nodes at −11.25 and +11.25 degrees, respectively) for conducting components that cross the cyclic boundary;
- −
A flux parallel boundary condition (AZ = 0) is applied on the nodes of the spherical boundary surface (at a radius of 120 m) and on the axial line, with the exception of one mid-side node of the axial line near the outer surface, in order to avoid the constrain of the toroidal flux to zero;
- −
Coupling of AZ on the master and slave was performed with an ad-hoc APDL macro that imposes equality constraint equations (CE) taking into account the edge integral direction. This requires an equivalent mesh on the master and slave section, which was respected during the creation of GDM1 and GDM2.
2.2. Excitation Loads
The plasma disruption event, taken as a reference for this work, is a fast UVDE with a thermal quench (TQ) characteristic time of 4 ms and a current quench characteristic time of 74 ms. Plasma evolution was calculated using the CarMa0NL code, as reported in [
23]. The time behaviour of the main plasma characteristics is shown in
Figure 8.
The plasma behaviour was implemented through a set of toroidal filaments (PFV) with equivalent currents that simulate the poloidal magnetic field generated by the plasma outside the plasma region; and a toroidal solenoid (TFV) in the central region of the plasma for the generation of the plasma toroidal flux.
The electric currents in the toroidal field coils (TFCs), as well as in the central solenoid (CS) and the poloidal field coils (PFCs), are assumed to be constant during the plasma disruption. The current in the TFC is chosen to produce a toroidal field of 4.9T at the nominal plasma radius of 8.9. The current direction is such that both the plasma and toroidal magnetic fields are clockwise (see
Figure 9).
3. Validation and Verification
The verification of the sub-modeling procedure is mainly aimed to check the correct importing of the boundary conditions into the sub-model and the feasibility of the edge-elements using time-dependent boundary conditions. It was conducted using SUB1 and GDM2 (from which the boundary conditions for SUB1 were extracted). In particular, the procedure consists of the following steps: (1) a run of GDM2 under the EM transient produced by the UVDE; (2) the extraction of the DOF values at the SUB1 boundary nodes at each time step; (3) the importing of the obtained values as boundary loads to run SUB1; (4) a comparison of the magnetic flux density (B) and current density (J) calculated running GDM2 and SUB1 in the SUB1 region at each time step. The agreement of both B and J was verified within an error lower than 0.1%. An example of the current density and magnetic field distribution inside the FW and BZ pins calculated with GDM2 at the end of the CQ is shown in
Figure 10. Maximum and minimum values are also reported there. Due to the high agreement between the GDM2 and SUB1 results, the J and B plots obtained with SUB1 are omitted.
As the real goal of the sub-modeling is to perform detailed analyses of small regions without the need to run the highly time-consuming analyses of a whole model, a second step was performed. In this case, SUB1 was run assuming the DOF values at its boundary nodes as those evaluated by the same analysis performed with the GDM1 model. The obtained results were then compared with the results of the analyses performed with GDM2, and a first estimate of the reliability and precision of the used sub-modeling approach was performed. Moreover, the possibility of improving the precision of the sub-modeling procedure by extending the sub-model in such a way as to reduce the perturbation of the detailed region at the sub-model boundary was verified by performing the previous analysis using SUB2.
To have an estimate of the reliability of the method, the percentage deviations of the results calculated with SUB1 and SUB2 from the results obtained with the full EM model GDM2 were calculated. As a preliminary assessment, the comparison was made using the maximum values of magnetic flux density B and eddy current density J for the FW and the inner and outer pipes within the BZ calculated at the end of the thermal quench (t = 11.52 s) and at the end of the current quench (t = 11.6 s). The percentage deviation was estimated using the following equation:
where
V stays for the B or J magnitude;
cmp for one of the following components: FW, the inner or outer pipe assemblies;
subx for the analyses of SUB1 or SUB2. The results are reported in
Table 2.
Furthermore, the good agreement of B and J is also reflected in the EM loads, as can be seen in
Figure 11, which shows the total EM loads for the most loaded BZ pin calculated with SUB1, SUB2, and GDM2.
4. Conclusions
In the present investigation, the possibility of extending the electromagnetic sub-modeling procedure, accomplished by transferring the boundary conditions from a primary (coarse) to a secondary (refined) mesh, well-proven for elements that have a magnetic-nodal formulation, was exploited for elements that have an edge-flux formulation that are much more performant than the former in non-linear analyses. The approach was demonstrated to be good enough to provide reliable EM inputs to be used as input for the structural analysis of the BB internal structure. Moreover, the performed study highlights the possibility of considering part of the excitation loads into the sub-models, allowing an increase in the element layers around the detailed region and reducing the error.
However, due to the edge formulation of SOLID236, the application of this methodology is limited to the case in which the boundary interface mesh (used to export/import the boundary DOFs) in the coarse and sub-model mesh is the same. An investigation of possible strategies to overcome this restriction is ongoing.
Author Contributions
Conceptualization, I.A.M., M.R. and F.L.; methodology, M.R.; software, M.R.; validation, M.R. and I.A.M.; formal analysis, M.R.; investigation, M.R. and I.A.M.; resources, I.A.M. and F.L.; data curation, I.A.M. and M.R.; writing—original draft preparation, I.A.M.; writing—review and editing, M.R. and F.L.; visualization, I.A.M. and M.R.; supervision, I.A.M. and F.L.; project administration, I.A.M.; funding acquisition, I.A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This work was carried out within the framework of the EUROfusion Consortium, funded by the European Union via the Euratom Research and Training Programme (Grant Agreement No. 101052200–EUROfusion). Views and opinions expressed are, however, those of the author(s) only and do not necessarily reflect those of the European Union or the European Commission. Neither the European Union nor the European Commission can be held responsible for them.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations and acronyms are used in this manuscript:
| DEMO | DEMOnstration power plant |
| ITER | International thermonuclear experimental reactor |
| BB | Breeding blanket |
| HCPB | Helium cooled pebble bed |
| FE | Finite element |
| EM | Electromagnetic |
| UVDE | Upper vertical displacement event |
| DOF | Degree of freedom |
| GDM1 | Global DEMO model with coarse mesh |
| GDM2 | Global DEMO model with detailed mesh in the sub-model region |
| SUB1 | Sub-model with detailed mesh |
| SUB2 | Extended sub-model(SUB1 + extended boundary layer of coarse mesh) |
| FW | First wall |
| BZ | Breeding zone |
| BSS | Back supporting structure |
| DOF | Degree of freedom |
| AZ | Magnetic edge-flux DOF |
| VOLT | Electric DOF |
| CURR | Plasma toroidal current |
| PSI_TOR | Plasma toroidal flux |
| R | Cylindrical radial coordinate |
| Z | Cylindrical vertical coordinate |
| PFV | Plasma poloidal field variation |
| TFV | Plasma toroidal field variation |
| PFC | Poloidal field coil |
| CS | Central solenoid |
| TFC | Toroidal field coil |
| B | Magnetic flux density |
| J | Electric current density |
| TQ | Thermal quench |
| CQ | Current quench |
References
- Turner, M.J.; Clough, R.W.; Martin, H.C.; Topp, L.J. Stiffness and deflection analysis of complex structures. J. Aeronaut. Sci. 1956, 23, 805–823. [Google Scholar] [CrossRef]
- Hutton, D.V. Fundamental of Finite Element Analysis, 1st ed.; McGraw Hill Companies: New York, NY, USA, 2004. [Google Scholar]
- Available online: https://www.iter.org/ (accessed on 25 January 2023).
- Available online: https://www.euro-fusion.org/programme/demo/ (accessed on 25 January 2023).
- Hirai, I.; Wang, B.P.; Pilkey, W.D. An efficient zooming method for finite element analysis. Int. J. Numer. Methods Eng. 1984, 20, 1671–1683. [Google Scholar] [CrossRef]
- Hirai, I.; Uchiyama, Y.; Mizuta, Y.; Pilkey, W.D. An exact zooming method. Finite Elem. Anal. Des. 1985, 1, 61–69. [Google Scholar] [CrossRef]
- Kondo, M.; Sinclair, G.B. A simple substructuring procedure for finite element analysis of stress concentrations. Commun. Appl. Numer. Methods 1985, 1, 215–218. [Google Scholar] [CrossRef]
- Sun, C.T.; Mao, K.M. A global-local finite element method suitable for parallel computations. Comput. Struct. 1988, 29, 309–315. [Google Scholar] [CrossRef]
- Marin, A.; Bertolini, C.; Lucca, F.; Ma, Y.; Pagani, I.; Vayakis, G.; Viganò, F.; Wälsh, M. ITER Magnetic sensor platform Engineering analyses. Fusion Eng. Des. 2019, 146, 2644–2648. [Google Scholar] [CrossRef]
- Testoni, P.; Fanni, A.; Sonato, P. A sub-modeling approach for the electromechanical disruption analysis of the ITER ICH Antenna. Fusion Eng. Des. 2008, 83, 695–701. [Google Scholar] [CrossRef]
- Khan, S.H.; Cai, M.; Grattan, K.T.V.; Kajan, K.; Honeywood, M.; Mills, S. Design and investigation of high-speed, large-force and long lifetime electromagnetic actuators by finite element modelling. J. Phys. Conf. Ser. 2005, 15, 300–305. [Google Scholar] [CrossRef] [Green Version]
- Curreli, C.; Di Puccio, F.; Mattei, L. Application of the finite element submodeling technique in a single point contact and wear problem. Int. J. Numer. Methods. Eng. 2018, 116, 708–722. [Google Scholar] [CrossRef]
- Cormier, N.G.; Smallwood, B.S.; Sinclair, G.B.; Meda, G. Aggressive submodelling of stress concentrations. Int. J. Numer. Meth. Eng. 1999, 46, 889–909. [Google Scholar] [CrossRef]
- Aristovich, K.Y.; Khan, S.H. A new submodelling technique for multi-scale finite element computation of electromagnetic fields: Application in bioelectromagnetism. J. Phys. Conf. Ser. 2010, 238, 012050. [Google Scholar] [CrossRef]
- Pina-Estany, J.; Colominas, C.; Fraxedas, J.; Llobet, J.; Perez-Murano, F.; Puigoriol-Forcada, J.M.; Ruso, D.; Garcia-Granada, A. A statistical analysis of nanocavities replication applied to injection moulding. Int. Commun. Heat Mass Transf. 2017, 81, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Kitamura, M.; Ohtsubo, H.; Akiyama, A.; Bandoh, H. Submodeling analysis of ship structure with superconvergent patch recovery method. Int. J. Offshore Polar Eng. 2003, 13, 216–222. [Google Scholar]
- Mao, K.M.; Sun, C.T. A refined global-local finite element analysis method. Int. J. Numer. Methods Eng. 1991, 32, 29–43. [Google Scholar] [CrossRef]
- Katagiri, H.; Semba, K.; Sano, H.; Mimura, N.; Yamada, T. Fast calculation of AC copper loss for high speed machines by zooming method. IEEJ J. Ind. Appl. 2017, 6, 395–400. [Google Scholar] [CrossRef] [Green Version]
- Kowalski, M.; Kreischer, C. Metrological and numerical Validation of electromagnetic Sub-Model Techniques for 3D-FEM. In Proceedings of the 23rd International Conference on the Computation of Electromagnetic Fields, Cancun, Mexico, 16–20 January 2022. [Google Scholar]
- Mergia, K.; Boukos, N. Structural, thermal, electrical and magnetic properties of Eurofer 97 steel. J. Nucl. Mater. 2008, 373, 1–8. [Google Scholar] [CrossRef]
- DEMO1 Reference Design-2017 March (“EU DEMO1 2017”)-PROCESS Two Page Output. Available online: http://idm.euro-fusion.org/?uid=2NE9JA&version=v1.0 (accessed on 25 January 2023).
- Hernández, F.A.; Pereslavtsev, P.; Zhou, G.; Kang, Q.; D’Amico, S.; Neuberger, H.; Boccaccini, L.V.; Kiss, B.; Nádasi, G.; Maqueda, L.; et al. Consolidated design of the HCPB Breeding Blanket for the pre-Conceptual Design Phase of the EU DEMO and harmonization with the ITER HCPB TBM program. Fusion Eng. Des. 2020, 157, 111614. [Google Scholar] [CrossRef]
- Villone, F. PMI-5.3.1-T006-D001-Report on 3D Disruption Studies and Vertical Stability Studies. Available online: https://idm.euro-fusion.org/default.aspx?uid=2MNKBE&version=v1.2 (accessed on 25 January 2023).
- Maione, I.A.; Roccella, M.; Hernández, F.A.; Lucca, F. Update of electromagnetic loads on HCPB breeding blanket for DEMO 2017 configuration. Fusion Eng. Des. 2020, 156, 111604. [Google Scholar] [CrossRef]
- ANSYS APDL Reference Manual. Available online: https://www.ansys.com/ (accessed on 25 January 2023).
Figure 1.
Basic flowchart for the FEM sub-modeling procedure.
Figure 1.
Basic flowchart for the FEM sub-modeling procedure.
Figure 2.
Example of a slice of the HCPB concept with a pin internal structure. Refer to [
22] for a complete description.
Figure 2.
Example of a slice of the HCPB concept with a pin internal structure. Refer to [
22] for a complete description.
Figure 3.
Schematic representation of the implemented FEM models and computational steps used to check the sub-modeling procedure.
Figure 3.
Schematic representation of the implemented FEM models and computational steps used to check the sub-modeling procedure.
Figure 4.
View of the conductive structure of the global DEMO model (GDM1). The complete electromagnetic model consists of an additional enclosure of 120 m.
Figure 4.
View of the conductive structure of the global DEMO model (GDM1). The complete electromagnetic model consists of an additional enclosure of 120 m.
Figure 5.
The five blanket segments (two at inboard and three at outboard) included in the modeled 22.5 degrees HCPB DEMO sector.
Figure 5.
The five blanket segments (two at inboard and three at outboard) included in the modeled 22.5 degrees HCPB DEMO sector.
Figure 6.
Details of the additional models used for the V&V of the sub-modeling procedure. The purple and light blue regions in GMD2 identify the regions from which SUB1 and SUB2 are, respectively, extracted.
Figure 6.
Details of the additional models used for the V&V of the sub-modeling procedure. The purple and light blue regions in GMD2 identify the regions from which SUB1 and SUB2 are, respectively, extracted.
Figure 7.
(Left) Mesh of the pins inside the BZ of the detailed section of the central blanket. The external wall of the detailed section of FW was hidden to show the modeling of the tight cooling channeling inside; (right) model of a single pipe pair inside the detailed section of the BZ. In grey: insulating gaps between the two nested pipes; in blue and light blue: the conducting walls of the pipes.
Figure 7.
(Left) Mesh of the pins inside the BZ of the detailed section of the central blanket. The external wall of the detailed section of FW was hidden to show the modeling of the tight cooling channeling inside; (right) model of a single pipe pair inside the detailed section of the BZ. In grey: insulating gaps between the two nested pipes; in blue and light blue: the conducting walls of the pipes.
Figure 8.
Time behaviour of plasma current (CURR), plasma current centroid position (in cylindrical coordinates R and Z), and plasma toroidal flux (PSI_TOR) during the considered UVDE.
Figure 8.
Time behaviour of plasma current (CURR), plasma current centroid position (in cylindrical coordinates R and Z), and plasma toroidal flux (PSI_TOR) during the considered UVDE.
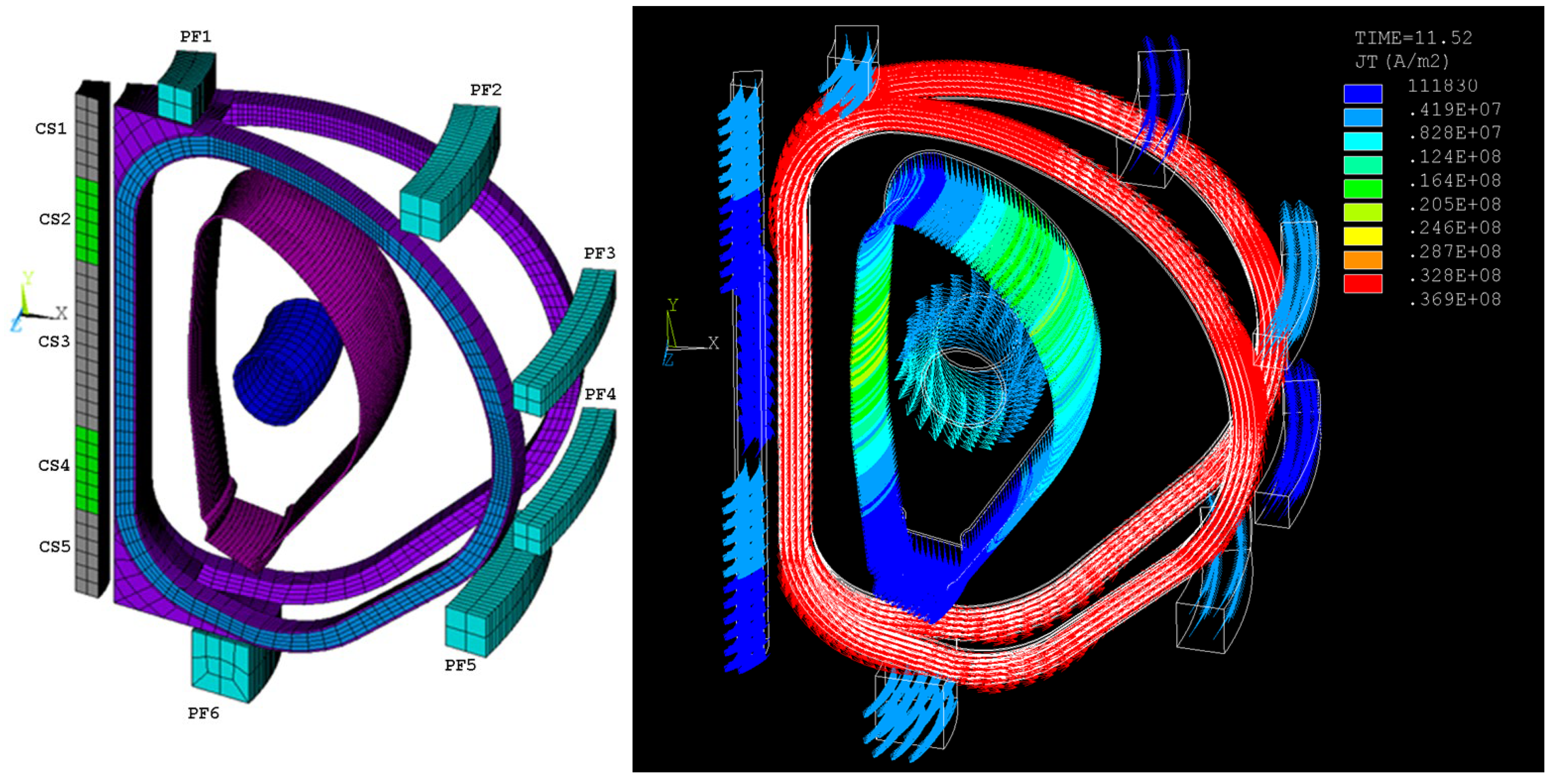
Figure 9.
(Left) The EM model of the excitations used to reproduce the complete EM transient due to plasma disruption. TFC winding pack (blue-cyan), TFC casing (violet), CS (green and grey), PFCs (cyan), PFV (magenta), TFV (blue). In the modeled DEMO sector are included only two halves of one TFC at the sector boundary. (Right) Current density vector plot in the CS, PFCs, TFCs, and PFV and TFV load excitation arrays at TQ peak time.
Figure 9.
(Left) The EM model of the excitations used to reproduce the complete EM transient due to plasma disruption. TFC winding pack (blue-cyan), TFC casing (violet), CS (green and grey), PFCs (cyan), PFV (magenta), TFV (blue). In the modeled DEMO sector are included only two halves of one TFC at the sector boundary. (Right) Current density vector plot in the CS, PFCs, TFCs, and PFV and TFV load excitation arrays at TQ peak time.
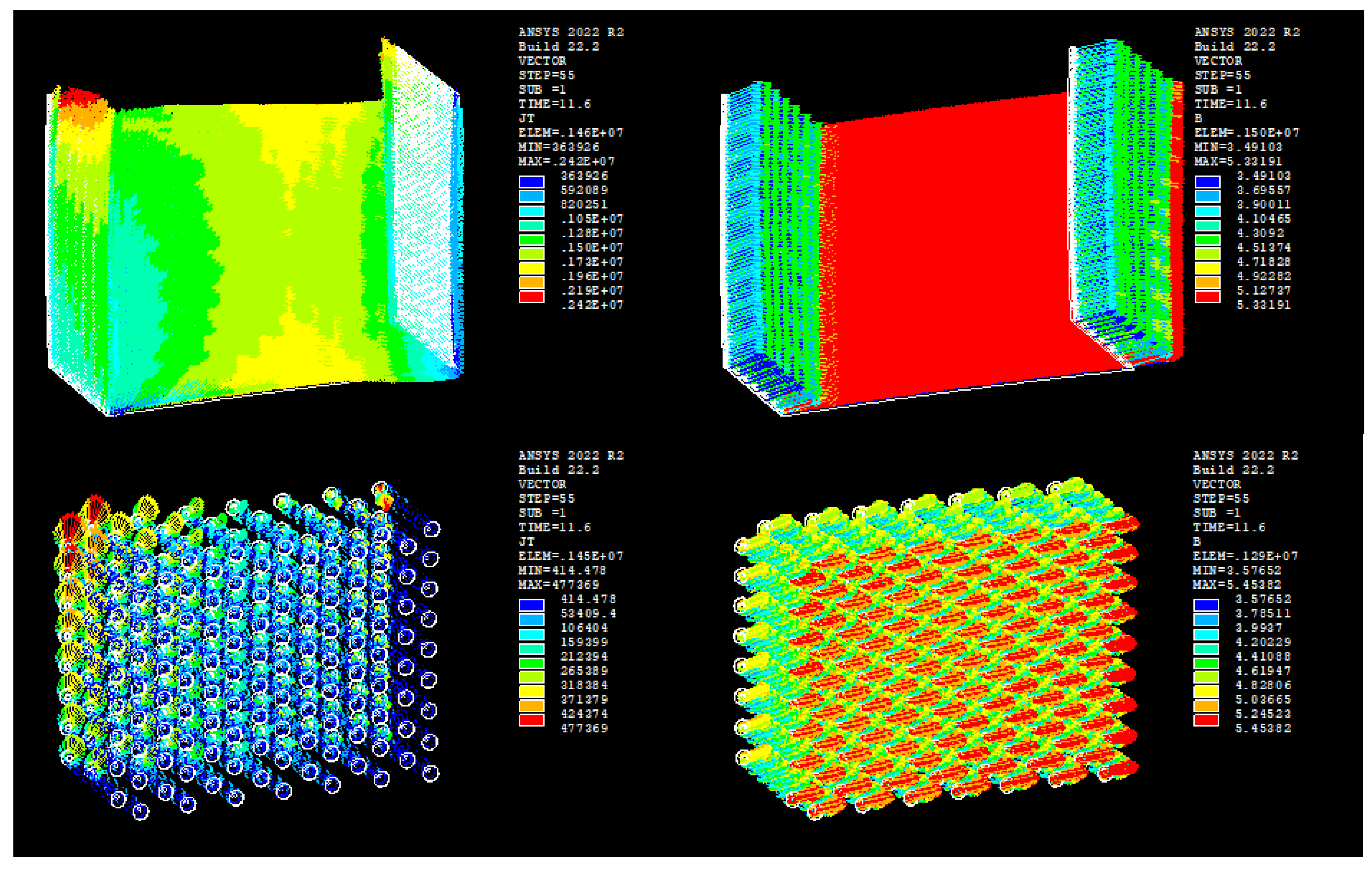
Figure 10.
Example of J (left) and B (right) distribution inside the FW (top) and the BZ pins (bottom) during the EM transient calculated using GDM2 at the end of the CQ (11.6 s).
Figure 10.
Example of J (left) and B (right) distribution inside the FW (top) and the BZ pins (bottom) during the EM transient calculated using GDM2 at the end of the CQ (11.6 s).
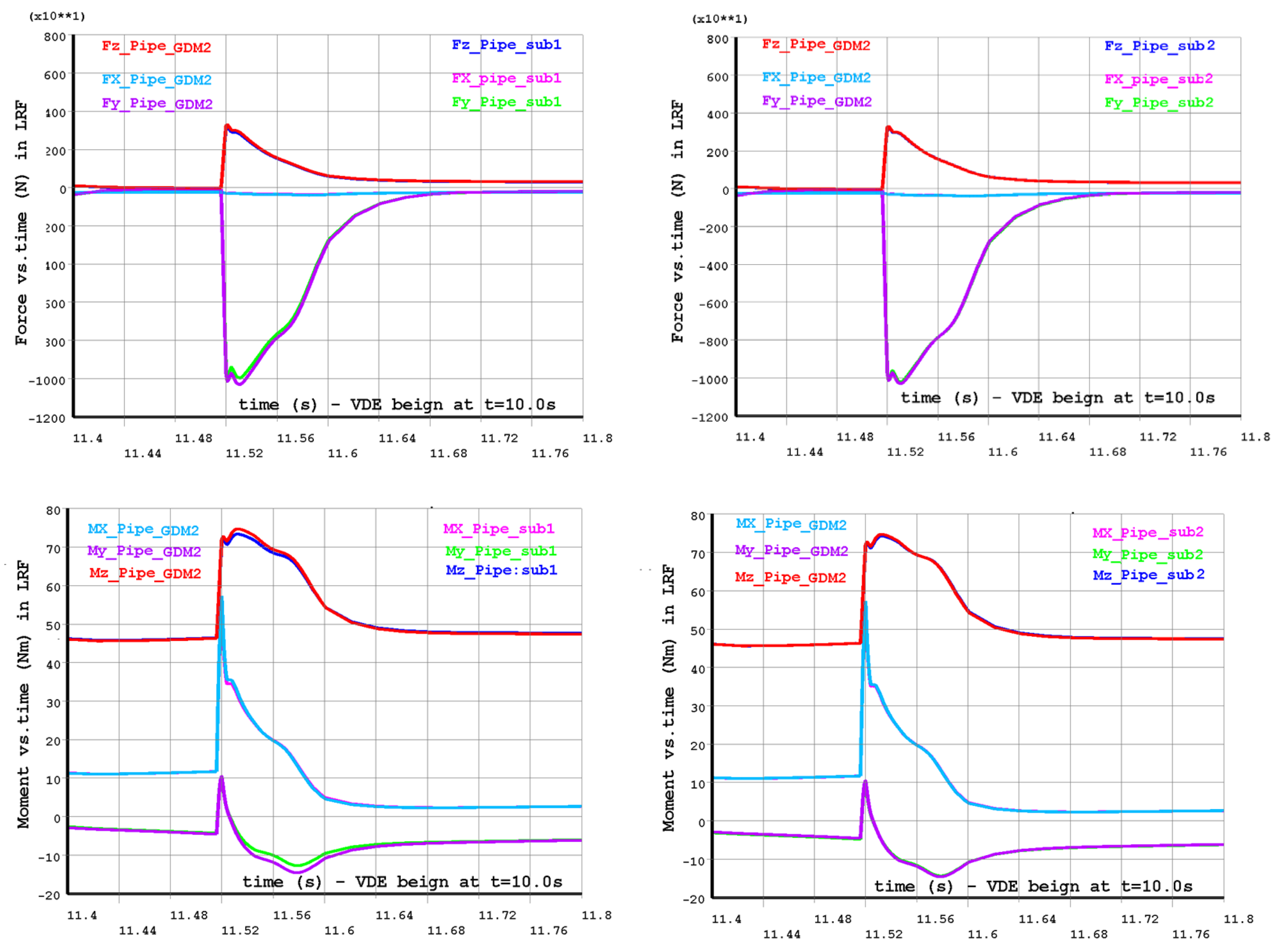
Figure 11.
Components of the total EM force (Fx, Fy, and Fz) and moment (Mx, My, Mz) on the most loaded BZ pin. Comparison, component by component, between SUB1 and GDM2 (left) and SUB2 and GDM2 (right).
Figure 11.
Components of the total EM force (Fx, Fy, and Fz) and moment (Mx, My, Mz) on the most loaded BZ pin. Comparison, component by component, between SUB1 and GDM2 (left) and SUB2 and GDM2 (right).
Table 1.
Element type options used for the generation of the electromagnetic FEM models (refer to [
25] for a detailed description of the used key options).
Table 1.
Element type options used for the generation of the electromagnetic FEM models (refer to [
25] for a detailed description of the used key options).
| ET, 1, SOLID236 | ET, 2, SOLID236 | Comment |
|---|
| KEYOPT,1,1,0 | KEYOPT,2,1,1 | Magnetic and electric DOFs: (ET 1) only AZ; (ET 2) AZ, VOLT |
| KEYOPT,1,2,0 | KEYOPT,2,2,0 | Strong (matrix) coupling between magnetic and electric DOFs |
| KEYOPT,1,5,0 | KEYOPT,2,5,0 | Eddy currents effects |
| KEYOPT,1,7,1 | KEYOPT,2,7,1 | Electromagnetic force output at element corner nodes only |
| KEYOPT,1,8,0 | KEYOPT,2,8,0 | Maxwell stress tensor electromagnetic force calculation |
Table 2.
Percentage deviations of B and J calculated using Equation (1) for SUB1 and SUB2 in respect to the GDM2 reference value.
Table 2.
Percentage deviations of B and J calculated using Equation (1) for SUB1 and SUB2 in respect to the GDM2 reference value.
| | From SUB1 Analysis (%) | From SUB2 Analysis (%) | GMD2 Reference Value |
|---|
| δBmax (FW at t = 11.52 s) | 0.3 | 0.07 | 5.43 T |
| δBmax (FW at t = 11.6 s) | 0.4 | 0.1 | 5.33 T |
| δJmax (FW at t = 11.52 s) | 3.0 | 0.9 | 10.2 MA/m2 |
| δJmax (FW at t = 11.6 s) | 9.0 | 0.8 | 2.42 MA/m2 |
| δBmax (Pin at t = 11.52 s) | 2.2 | 0.7 | 5.69 T |
| δBmax (Pin at t = 11.6 s) | 15 | 0.04 | 5.45 T |
| δJmax (Pin at t = 11.52 s) | 2.5 | 0.7 | 1.26 MA/m2 |
| δJmax (Pin at t = 11.6 s) | 5.7 | 0.6 | 0.47 MA/m2 |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}