Joint Mobile Data Collection and Wireless Energy Transfer in Wireless Rechargeable Sensor Networks



Abstract
:1. Introduction
2. Related Work
2.1. Energy Replenishment for WRSN
2.2. Mobile Data Collection
3. Network Model and Data Collection
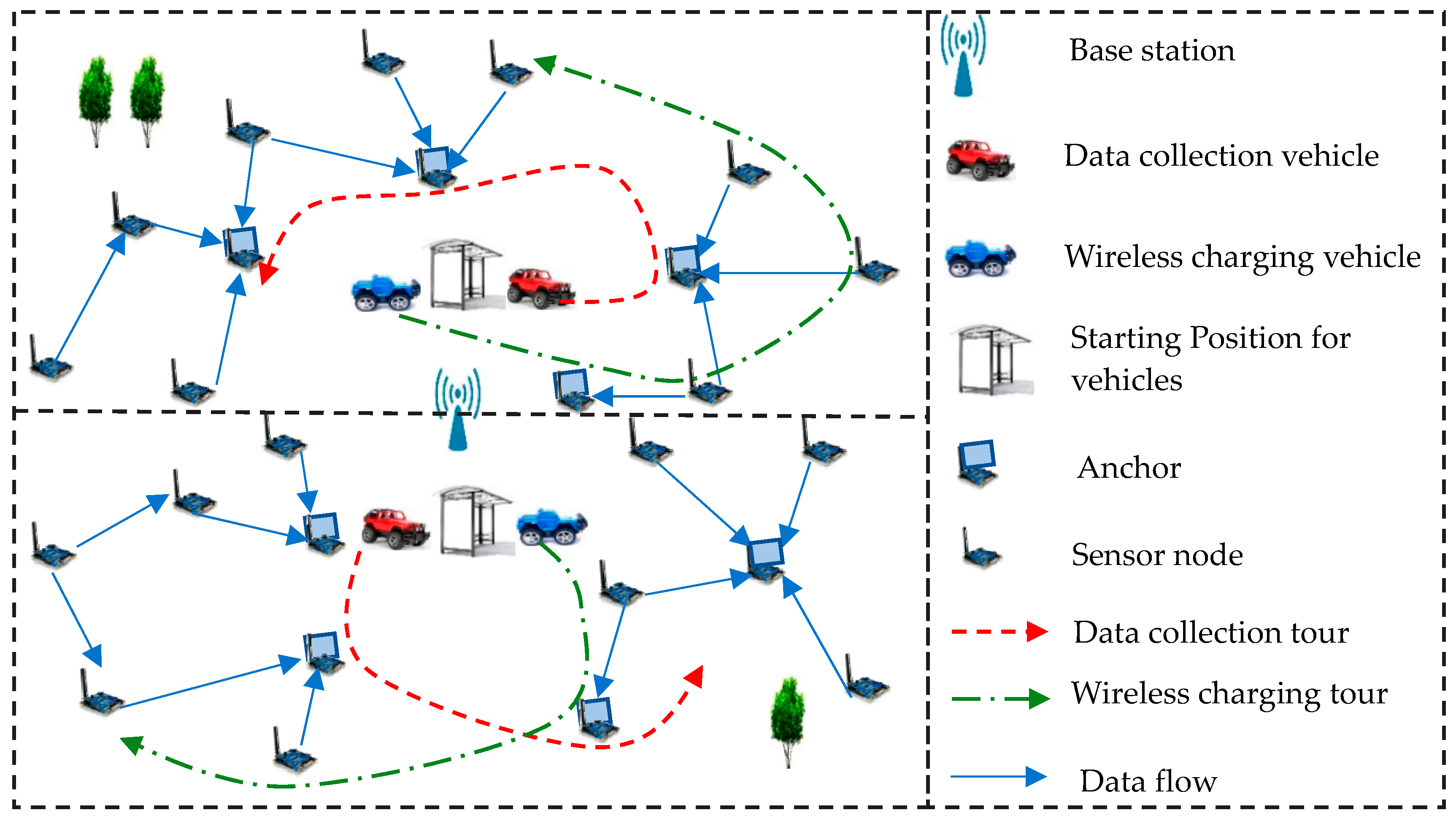
3.1. Network Model
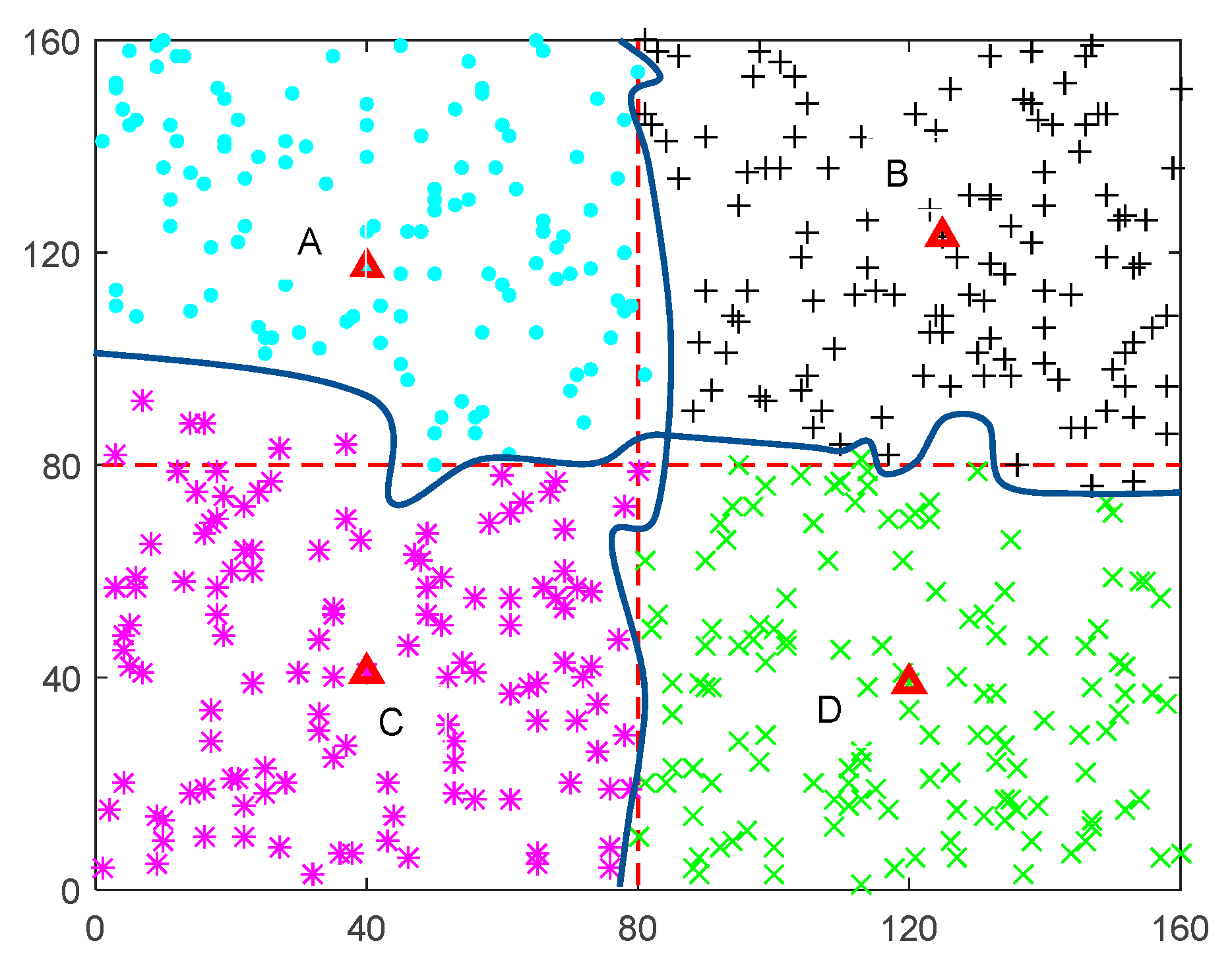
3.2. Adaptive Network Partition
- Carry out the first partition. This is similar to the method in [16] to divide the network. However, we divide the square network into c parts uniformly not using K-means method [16]. The other difference is the selection of the initial center. After the region is divided into c parts, we select a node in each part as the initial center point. The initial center points firstly are the node closest to the center location of each region, instead of the node with minimal energy. In addition, we calculate the distance d’ and the shortest routing hop h’ from each node to all central points. means the distance between node i and center point j, where . Then we sort the distance values of node i in an increasing order. means the serial number of the distance from node i to the center point j. When = 1, it means is the minimum distance. When = c, it means is the maximum distance. In a similar way, is denoted as the routing hop between node i to center point j, where . We sort the c numbers in an increasing order. means routing hop serial number from nodes i to center point j.
- Carry on the second partition. We compute the weight of each node i to j firstly. Here, . α and β are defined as the proportions of distance priority and routing hop priority. Define as the ratio of α and β. If , our algorithm can be regarded as considering routing hop only. On the contrary, our algorithm can be transformed as taking distance into account merely when . In this scenario, we joint consider distance and routing hop equally to make . Subsequently, we select the smallest as a result of partitioning and assign the node i to the jth region. Loop this process until all nodes in the network are partitioned. The adaptive network partition algorithm with twice-partition is shown in Algorithm 1.
Algorithm 1 A Twice-Partition Algorithm Based on Center Points Input: sensor nodes N, center points numbers c. Output: min {}. Compute distance and shortest routing hop between node i to center point j, where . Sort and in an increasing order. means distance serial number and means routing hop serial number of node i to center point j. While Compute . min {}, assign the node i to the jth region. N = N − i. End
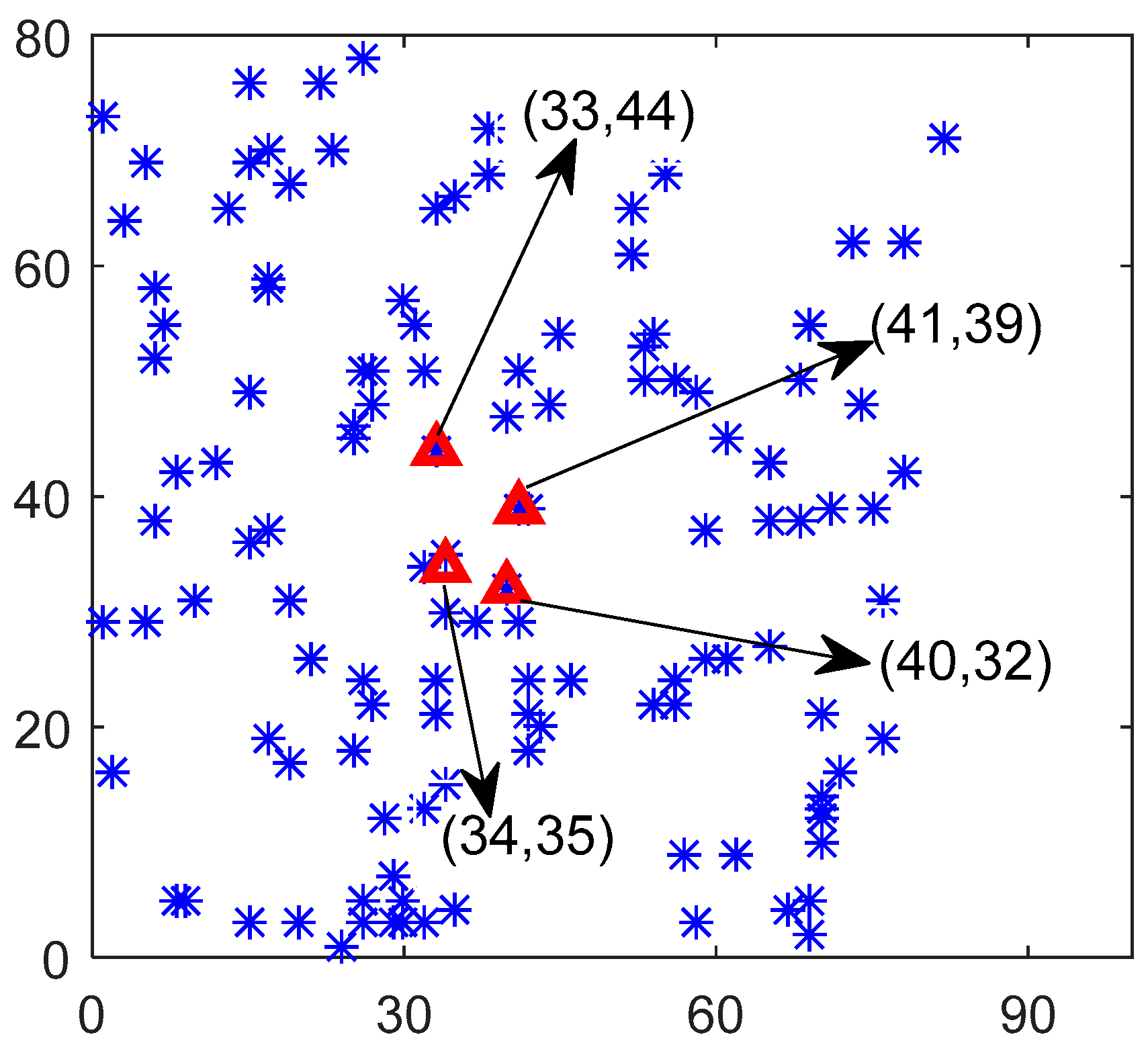
3.3. Vehicles Starting Point
| Algorithm 2 Starting Point of Vehicles Selection Algorithm |
| Input: sensor nodes nr in a cell. |
| Output: min {}, . |
| Compute distance for node k, where . |
| Compute routing hop for nodes k, where . |
| Sort and in an increasing order. |
| means distance serial number and means routing hop serial number of node k. |
| Compute , where . |
| , assign starting point to the position of node with W. |
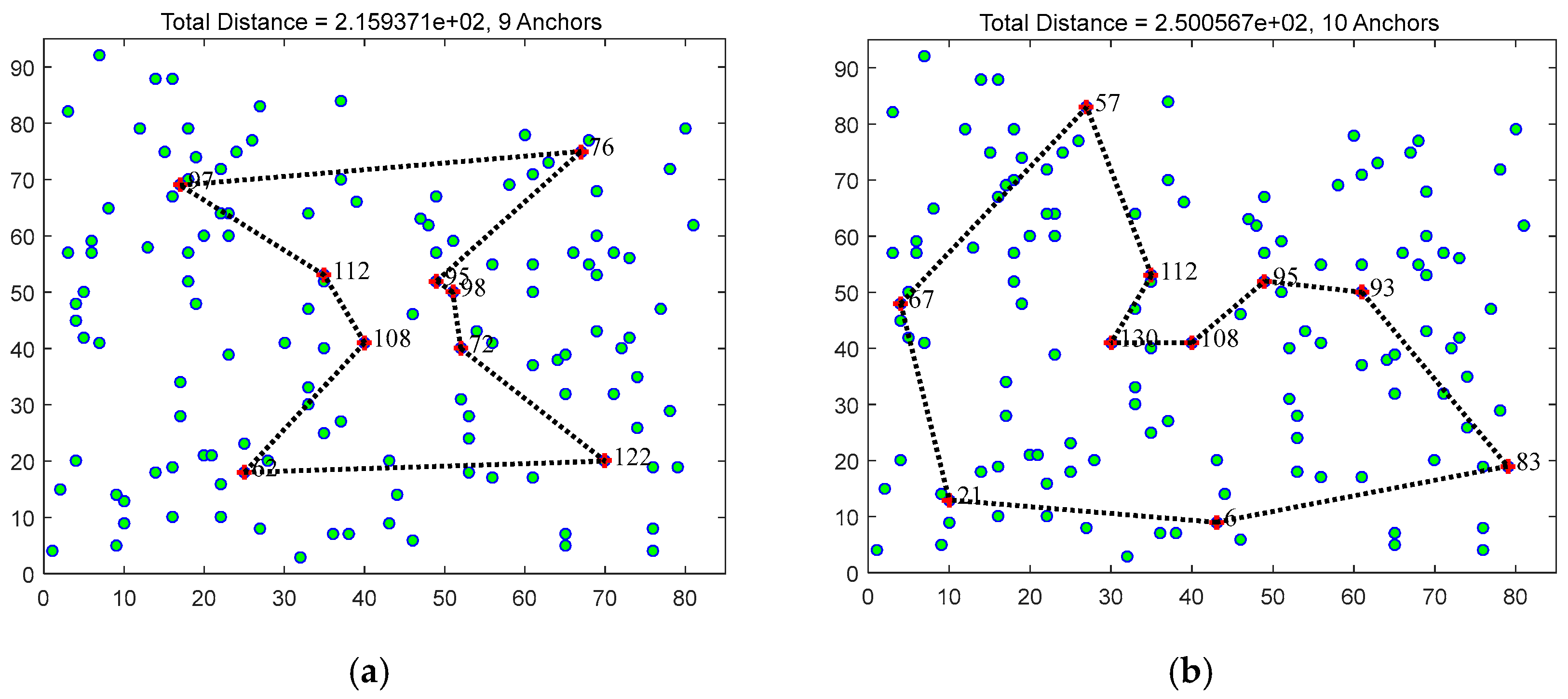
3.4. Adaptive Anchor Point Selection
| Algorithm 3 Anchor Point Selection Algorithm. |
| Input: sensor nodes nr in a cell, connected matrix X. |
| Output: Anchor Point list A. |
| Compute node amount within k hops for nodes i , Compute the least energy of nodes i within k hops . |
| Sort and in a decreasing order. |
| means nodes amount serial number and means energy serial number of node i. |
| Compute and Sort in an increasing order, denote as Ns. |
| Initialize node index i = 1, k = 1, j = | Ns |. |
| While |
| Obtain ith element in Ns and insert to A; |
| For k from 1 to j |
| If Xik > 0, and set k as descendant of i; End if |
| End for |
| ; |
| End while |
| Obtain anchor point list A from above. |
| While true |
| Compute the shortest migration tour Ltsp through sensors in A. |
| If , break; |
| Else Remove anchors with the largest Wi from A; End if |
| End while |
4. Performance Optimization
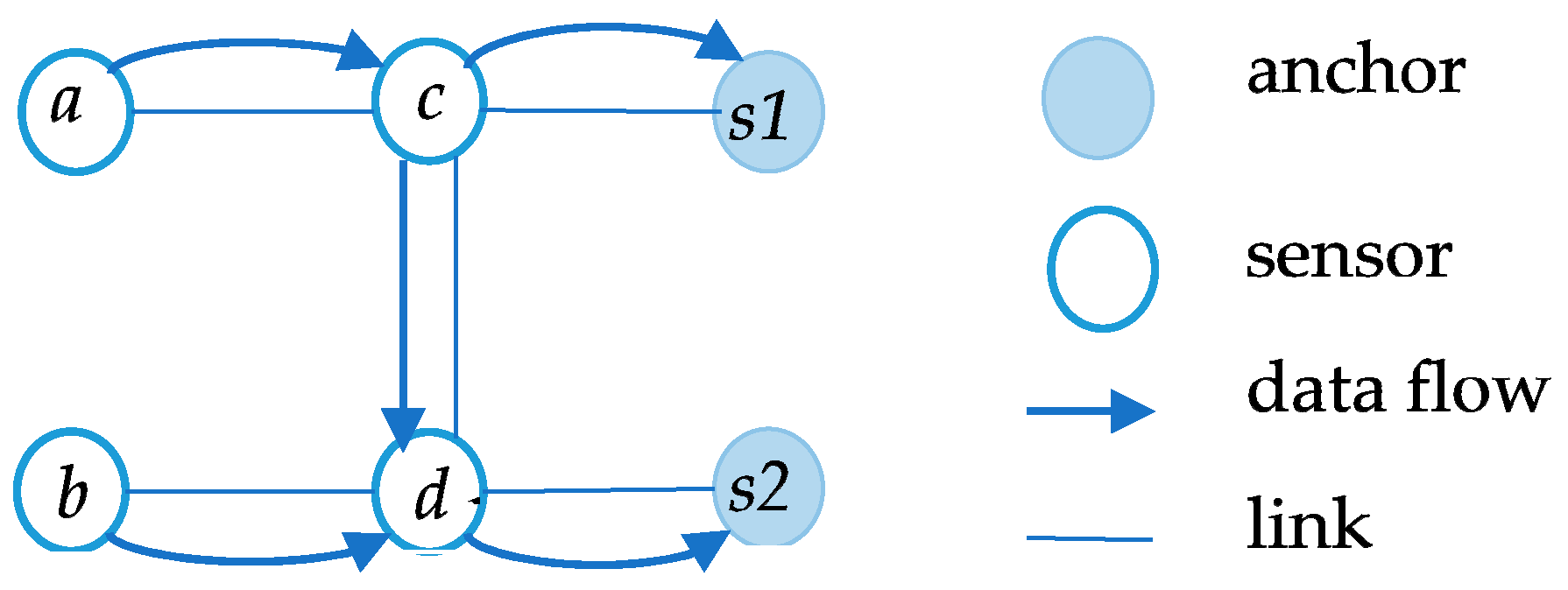
4.1. Formulate Problem for Mobile Data Gathering
4.2. Lagrange Dual and Sub-Problem for Data Rate and Link Rate
4.3. Optimal Charging Threshold
5. Performance Evaluation
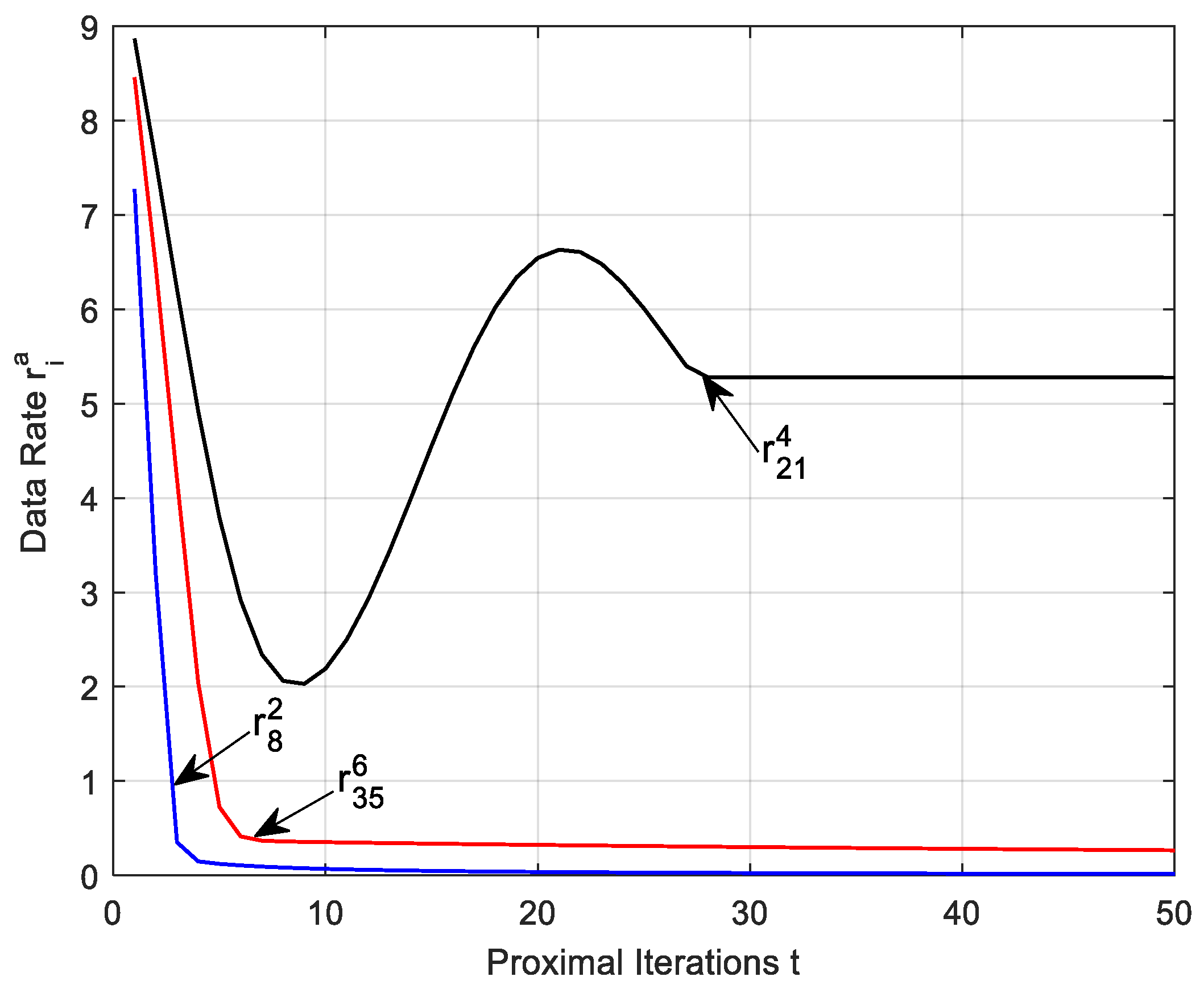
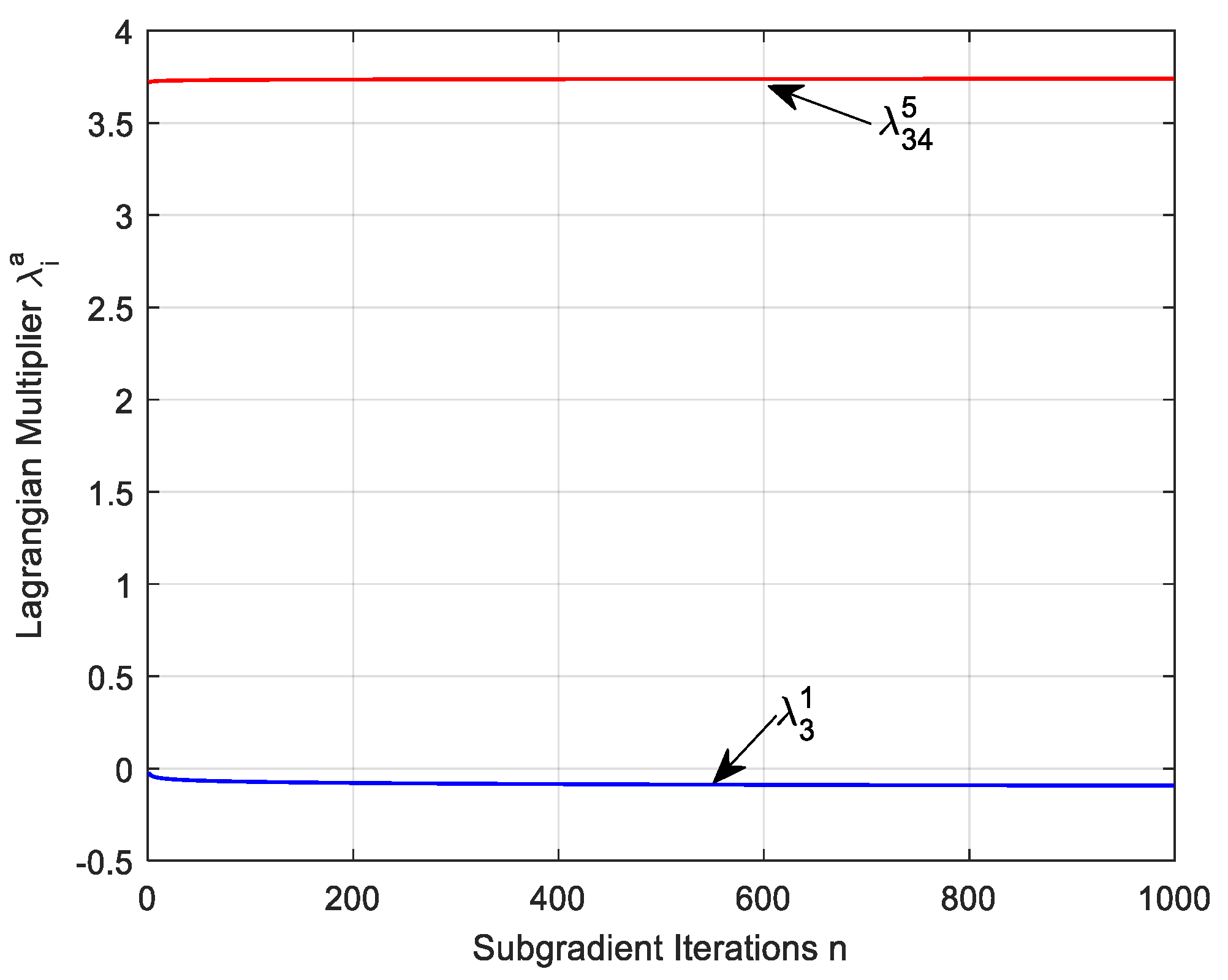
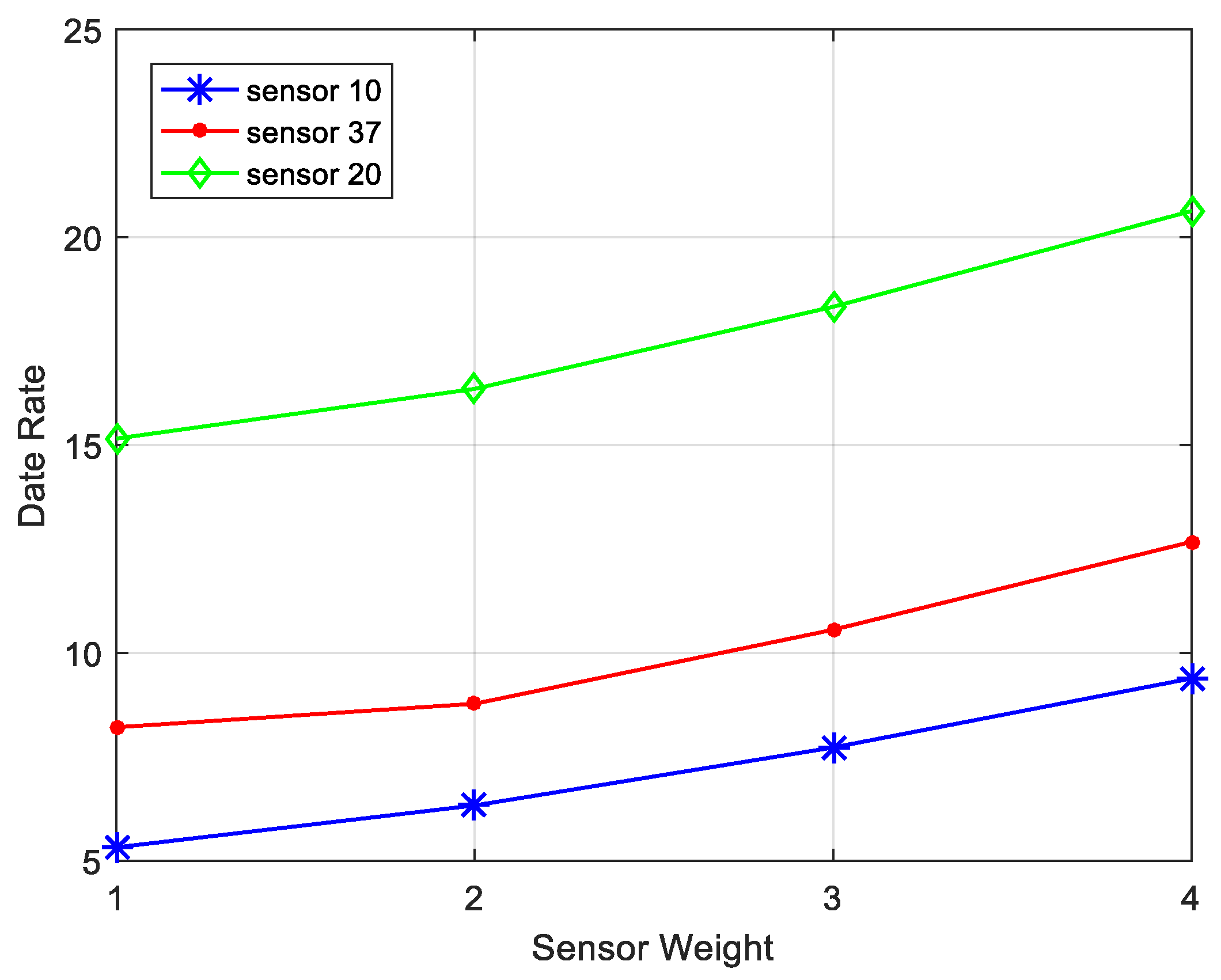
5.1. Performance Analysis for Starting Point and Data Rate Algorithm
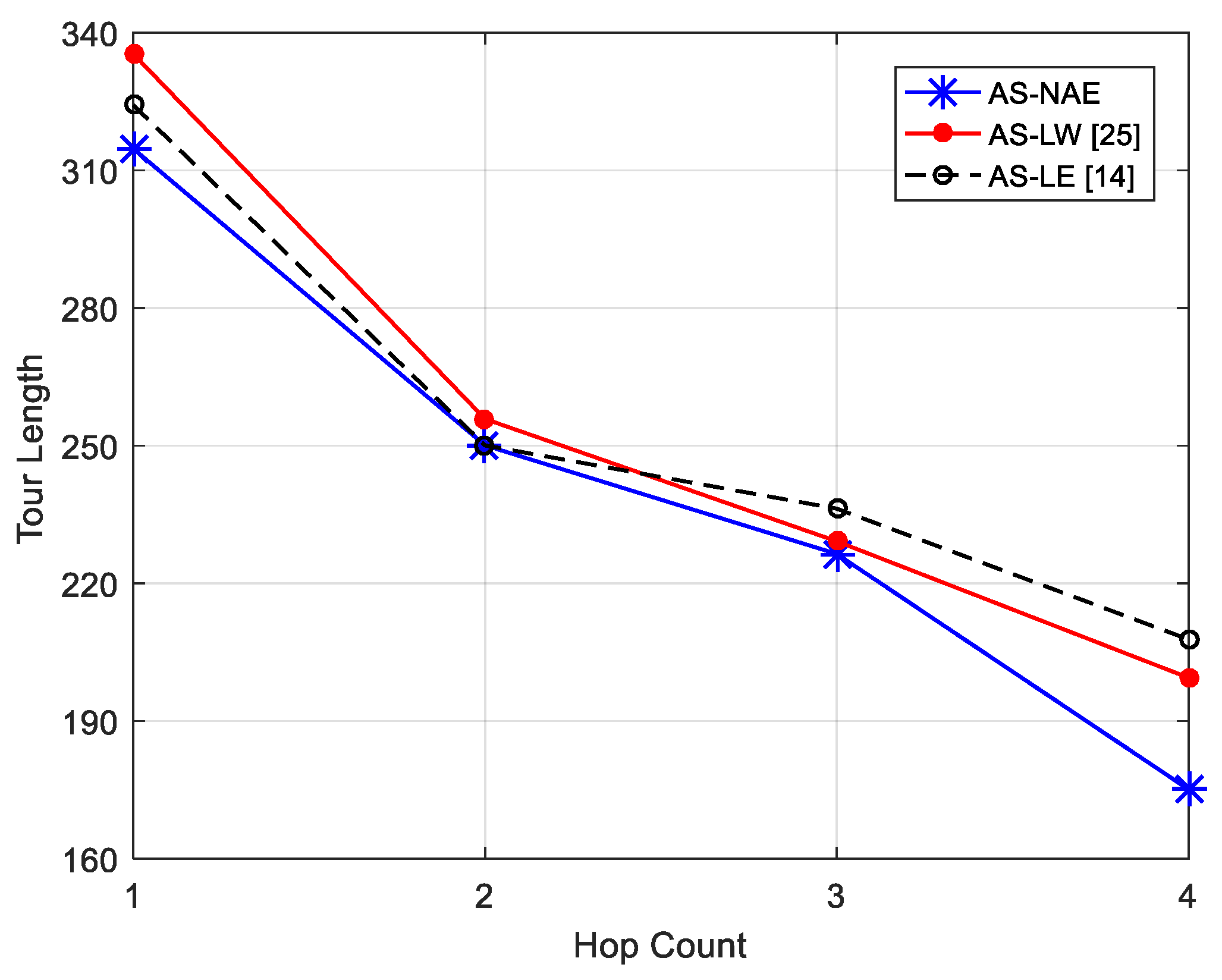
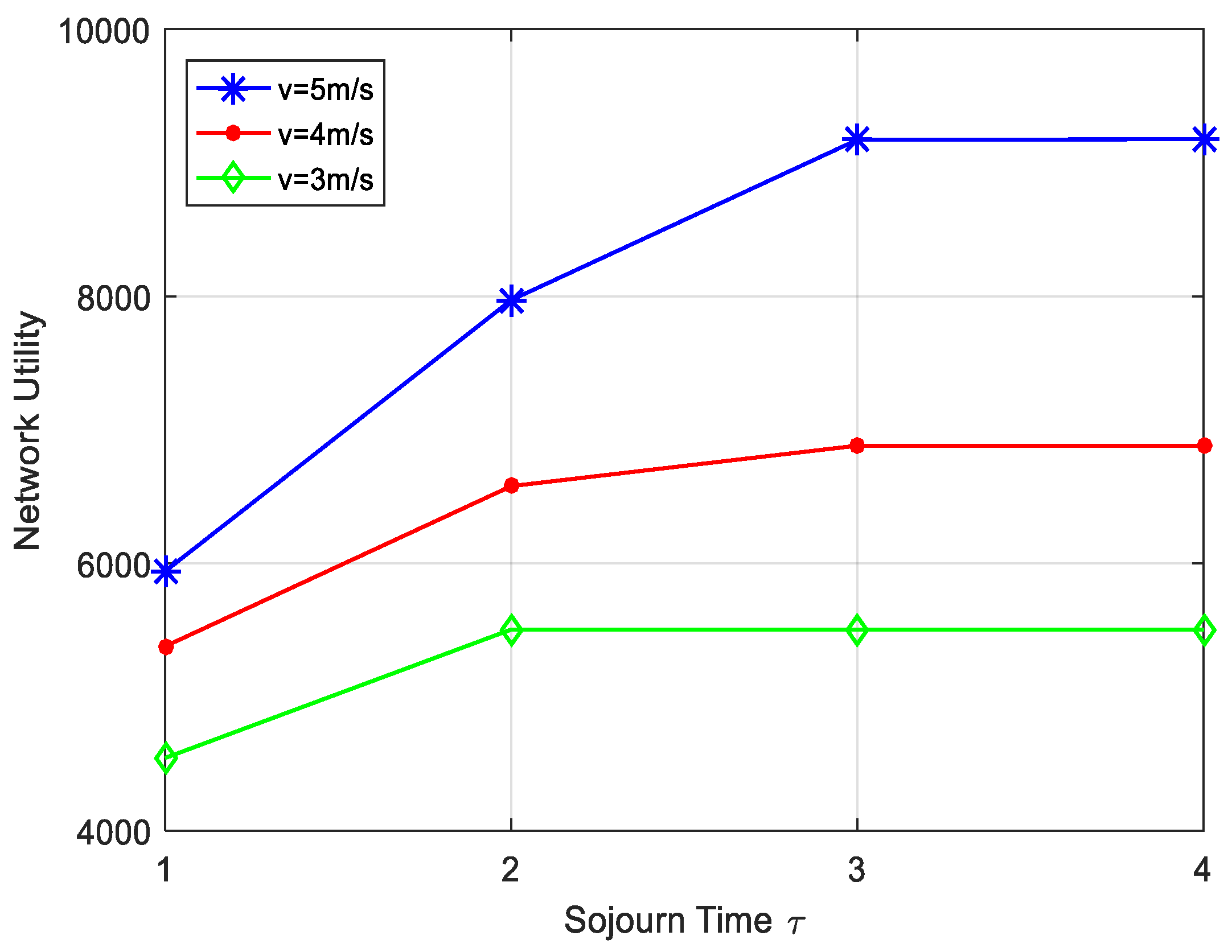
5.2. Performance Analysis Based on Different Parameter Settings
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.Y. Energy provisioning in wireless rechargeable sensor networks. In Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 2006–2014. [Google Scholar] [CrossRef]
- Liu, Q.; Golinński, M.; Pawełczak, P.; Warnier, M. Green wireless power transfer networks. J. IEEE Sel. Areas Commun. 2016, 34, 1740–1756. [Google Scholar] [CrossRef]
- Bi, S.; Zeng, Y.; Zhang, R. Wireless powered communication networks: An overview. IEEE Wirel. Commun. 2016, 23, 10–18. [Google Scholar] [CrossRef]
- Zhang, R.; Ho, C.K. MIMO broadcasting for simultaneous wireless information and power transfer. IEEE Trans. Wirel. Commun. 2013, 12, 1989–2001. [Google Scholar] [CrossRef]
- Lu, X.; Wang, P.; Niyato, D.; Dong, I.K.; Han, Z. Wireless charging technologies: Fundamentals, standards, and network applications. IEEE Commun. Surv. Tutor. 2015, 18, 1413–1452. [Google Scholar] [CrossRef]
- Angelopoulos, C.M.; Nikoletseas, S.; Raptis, T.P.; Raptopoulos, C.; Vasilakis, F. Efficient energy management in wireless rechargeable sensor networks. In Proceedings of the 15th ACM International Conference on Modeling, Analysis And Simulation Of Wireless And Mobile System, Paphos, Cyprus, 21–25 October 2012; pp. 309–316. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, C. Wireless Rechargeable Sensor Networks; Springer International Publishing: West Berlin, Germany, 2015; ISBN 978-3-319-17655-0. [Google Scholar]
- Chiu, T.C.; Shih, Y.Y.; Pang, A.C.; Jeng, J.Y.; Hsiu, P.C. Mobility-aware charger deployment for wireless rechargeable sensor networks. In Proceedings of the IEEE Network Operations and Management Symposium, Seoul, Korea, 25–27 September 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W. Bundling mobile base station and wireless energy transfer: Modeling and optimization. In Proceedings of the IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 1636–1644. [Google Scholar] [CrossRef]
- Lin, C.; Wu, G.; Xia, F.; Li, M.; Yao, L.; Pei, Z. Energy efficient ant colony algorithms for data aggregation in wireless sensor networks. J. Comput. Syst. Sci. 2012, 78, 1686–1702. [Google Scholar] [CrossRef]
- Luo, H.; Tao, H.; Ma, H.; Das, S.K. Data fusion with desired reliability in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2010, 22, 501–513. [Google Scholar] [CrossRef]
- Tan, R.; Xing, G.; Liu, B.; Wang, J.; Jia, X. Exploiting data fusion to improve the coverage of wireless sensor networks. IEEE/ACM Trans. Netw. 2012, 20, 450–462. [Google Scholar] [CrossRef]
- Liu, Y.; Xiong, N.; Zhao, Y.; Vasilakos, A.V. Multi-layer clustering routing algorithm for wireless vehicular sensor networks. IET Commun. 2010, 4, 810–816. [Google Scholar] [CrossRef]
- Wang, C.; Li, J.; Ye, F.; Yang, Y. Recharging schedules for wireless sensor networks with vehicle movement costs and capacity constraints. In Proceedings of the 2014 Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Singapore, 30 June–3 July 2014; pp. 468–476. [Google Scholar] [CrossRef]
- Zhao, M.; Li, J.; Yang, Y. A framework of joint mobile energy replenishment and data gathering in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 2689–2705. [Google Scholar] [CrossRef]
- Wang, C.; Li, J.; Ye, F.; Yang, Y. A mobile data gathering framework for wireless rechargeable sensor networks with vehicle movement costs and capacity constraints. IEEE Trans. Comput. 2016, 65, 2411–2427. [Google Scholar] [CrossRef]
- Powercast Corp. Available online: http://www.powercastco.com (accessed on 15 August 2017).
- Peng, Y.; Li, Z.; Zhang, W.; Qiao, D. Prolonging Sensor Network Lifetime through Wireless Charging. IEEE Real-Time Syst. Symp. 2010, 41, 129–139. [Google Scholar] [CrossRef]
- Liu, R.S.; Sinha, P.; Koksal, C.E. Joint Energy Management and Resource Allocation in Rechargeable Sensor Networks. In Proceedings of the Conference on Information Communications, San Diego, CA, USA, 14–19 March 2010; Volume 29, pp. 902–910. [Google Scholar]
- Wang, C.; Li, J.; Ye, F.; Yang, Y. NETWRAP: An NDN based real-time wireless recharging framework for wireless sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 1283–1297. [Google Scholar] [CrossRef]
- Shi, Y.; Xie, L.; Hou, Y.T.; Sherali, H.D. On renewable sensor networks with wireless energy transfer. In Proceedings of the IEEE INFOCOM, Shanghai, China, 10–15 April 2011; pp. 10–18. [Google Scholar] [CrossRef]
- Hu, C.; Wang, Y. Minimizing the number of mobile chargers to keep large-scale WRSNs working perpetually. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015. [Google Scholar] [CrossRef]
- Xu, W.; Liang, W.; Lin, X.; Mao, G. Efficient scheduling of multiple mobile chargers for wireless sensor networks. IEEE Trans. Veh. Technol. 2016, 65, 7670–7683. [Google Scholar] [CrossRef]
- Wang, C.; Li, J.; Yang, Y.; Ye, F. A hybrid framework combining solar energy harvesting and wireless charging for wireless sensor networks. In Proceedings of the IEEE International Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, H.; Das, S.K. Efficient data collection in wireless sensor networks with path-constrained mobile sinks. IEEE Trans. Mob. Comput. 2010, 10, 592–608. [Google Scholar] [CrossRef]
- Wang, C.; Guo, S.; Yang, Y. An optimization framework for mobile data collection in energy-harvesting wireless sensor networks. IEEE Trans. Mob. Comput. 2016, 15, 2969–2986. [Google Scholar] [CrossRef]
- Xiong, N.; Jia, X.; Yang, L.T.; Vasilakos, A.V.; Li, Y.; Pan, Y. A distributed efficient flow control scheme for multirate multicast networks. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 1254–1266. [Google Scholar] [CrossRef]
- Liu, A.; Liu, X.; Wei, T.; Yang, L.T.; Rho, S.; Paul, A. Distributed multi-representative re-fusion approach for heterogeneous sensing data collection. ACM Trans. Embed. Comput. Syst. 2017, 16, 73. [Google Scholar] [CrossRef]
- Hollinger, G.A.; Choudhary, S.; Qarabaqi, P.; Murphy, C.; Mitra, U.; Sukhatme, G.S. Underwater data collection using robotic sensor networks. IEEE J. Sel. Areas Commun. 2012, 30, 899–911. [Google Scholar] [CrossRef]
- He, L.; Pan, J.; Xu, J. A progressive approach to reducing data collection latency in wireless sensor networks with mobile elements. IEEE Trans. Mob. Comput. 2013, 12, 1308–1320. [Google Scholar] [CrossRef]
- Zhao, M.; Yang, Y. Bounded relay hop mobile data gathering in wireless sensor networks. IEEE Trans. Comput. 2010, 61, 265–277. [Google Scholar] [CrossRef]
- Shi, Y.; Hou, Y.T. Some fundamental results on base station movement problem for wireless sensor networks. IEEE/ACM Trans. Netw. 2012, 20, 1054–1067. [Google Scholar] [CrossRef]
- Zhao, M.; Ma, M.; Yang, Y. Mobile Data Gathering with Space-Division Multiple Access in Wireless Sensor Networks. In Proceedings of the INFOCOM Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 1283–1291. [Google Scholar] [CrossRef]
- Zhao, M.; Yang, Y. Optimization-based distributed algorithms for mobile data gathering in wireless sensor networks. IEEE Trans. Mob. Comput. 2012, 11, 1464–1477. [Google Scholar] [CrossRef]
- Ghaleb, M.; Subramaniam, S.; Othman, M.; Zukarnain, Z. Predetermined path of mobile data gathering in wireless sensor networks based on network layout. EURASIP J. Wirel. Commun. Netw. 2014, 51. [Google Scholar] [CrossRef]
- Lacuesta, R.; Gallardo, J.; Lloret, J.; Palacios, G. Integration of data from vehicular ad hoc networks using model-driven collaborative tools. Mob. Inf. Syst. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Ahmed, S.H.; Bouk, S.H.; Yaqub, M.A.; Kim, D.; Song, H.; Lloret, J. CODIE: Controlled data and interest evaluation in vehicular named data networks. IEEE Trans. Veh. Technol. 2016, 65, 3954–3963. [Google Scholar] [CrossRef]
- Khan, F.A.; Khan, S.A.; Turgut, D.; Boloni, L. Optimizing Resurfacing Schedules to Maximize Value of Information in UWSNs. In Proceedings of the IEEE Global Communications Conference, Washington, DC, USA, 4–8 December 2016. [Google Scholar] [CrossRef]
- Chen, L.; Wang, J.; Peng, X.; Kui, X. An energy-efficient and relay hop bounded mobile data gathering algorithm in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2015, 12. [Google Scholar] [CrossRef]
- Lin, H.; Bai, D.; Gao, D.; Liu, Y. Maximum data collection rate routing protocol based on topology control for rechargeable wireless sensor networks. Sensors 2016, 16, 1201. [Google Scholar] [CrossRef] [PubMed]
- Javaid, N.; Ilyas, N.; Ahmad, A.; Alrajeh, N.; Qasim, U.; Khan, Z.A. An efficient data-gathering routing protocol for underwater wireless sensor networks. Sensors 2015, 15, 29149–29181. [Google Scholar] [CrossRef] [PubMed]
- Ma, M.; Yang, Y. SenCar: An Energy-Efficient Data Gathering Mechanism for Large-Scale Multihop Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2007, 18, 1476–1488. [Google Scholar] [CrossRef]
- Izadi, D.; Ghanavati, S.; Abawajy, J.; Herawan, T. An alternative data collection scheduling scheme in wireless sensor networks. Computing 2016, 98, 1287–1304. [Google Scholar] [CrossRef]
- Zhao, M.; Ma, M.; Yang, Y. Efficient data gathering with mobile collectors and space-division multiple access technique in wireless sensor networks. Int. J. Eng. Trends Technol. 2014, 18, 400–417. [Google Scholar] [CrossRef]
- Ma, M.; Yang, Y.; Zhao, M. Tour planning for mobile data-gathering mechanisms in wireless sensor networks. IEEE Trans. Veh. Technol. 2013, 62, 1472–1483. [Google Scholar] [CrossRef]
- Liu, A.; Jin, X.; Cui, G.; Chen, Z. Deployment guidelines for achieving maximum lifetime and avoiding energy holes in sensor network. Inf. Sci. 2013, 230, 197–226. [Google Scholar] [CrossRef]
- Akyol, U.; Andrews, M.; Gupta, P.; Hobby, J. Joint Scheduling and Congestion Control in Mobile Ad-Hoc Networks. In Proceedings of the 27th Conference on Computer Communications INFOCOM, Phoenix, AZ, USA, 13–18 April 2008; pp. 619–627. [Google Scholar]
- Lin, C.; Wang, Z.; Han, D.; Wu, Y.; Yu, C.W.; Wu, G. TADP: Enabling temporal and distantial priority scheduling for on-demand charging architecture in wireless rechargeable sensor networks. J. Syst. Arch. 2016, 70, 26–38. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| N | Set of sensor nodes in the whole network |
| nr | Set of sensor nodes in a cell after network partition |
| A | Set of anchors points in a cell |
| Data rate of sensor i when DCV is at anchor point a | |
| Link rate over (i, j) when DCV is at anchor point a | |
| Pi,a | Set of parent nodes of sensor i for anchor a |
| Ci,a | Set of children nodes of sensor i for anchor a |
| τa | Sojourn time of DCV at anchor a in a migration tour |
| Lb | Upper bound of migration tour |
| Ltsp | Tour length in a migration tour |
| T | Data collection cycle |
| Cb | Residual energy of node |
| Cv | Residual energy of vehicle |
| Cr | Max energy of each vehicle |
| Cs | Max energy of node |
| et, er | Energy consumed for transmitting or receiving a unit flow |
| es | Energy consumed for generating and sensing a unit flow |
| v | Moving velocity of the vehicle |
| Parameter | Value |
|---|---|
| Cr | 10 J |
| Cs | 20 KJ |
| es | 0.05 mJ |
| er,et | 0.3 mJ |
| v | 3–5 m/s |
| π | 10 Kbits |
| α, β | Coordinate | α, β | Coordinate |
|---|---|---|---|
| 0.5,0.5 | (41,39) | 0.5,0.5 | (41,39) |
| 0.6,0.4 | (34,35) | 0.4,0.6 | (41,39) |
| 0.7,0.3 | (34,35) | 0.3,0.7 | (41,39) |
| 0.8,0.2 | (34,35) | 0.2,0.8 | (41,39) |
| 0.9,0.1 | (40,32) | 0.1,0.9 | (33,44) |
| 1,0 | (40,32) | 0,1 | (33,44) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, P.; Li, Y.-T.; Liu, W.-R.; Duan, G.-H.; Chen, Y.-W.; Xiong, N. Joint Mobile Data Collection and Wireless Energy Transfer in Wireless Rechargeable Sensor Networks. Sensors 2017, 17, 1881. https://doi.org/10.3390/s17081881
Zhong P, Li Y-T, Liu W-R, Duan G-H, Chen Y-W, Xiong N. Joint Mobile Data Collection and Wireless Energy Transfer in Wireless Rechargeable Sensor Networks. Sensors. 2017; 17(8):1881. https://doi.org/10.3390/s17081881
Chicago/Turabian StyleZhong, Ping, Ya-Ting Li, Wei-Rong Liu, Gui-Hua Duan, Ying-Wen Chen, and Neal Xiong. 2017. "Joint Mobile Data Collection and Wireless Energy Transfer in Wireless Rechargeable Sensor Networks" Sensors 17, no. 8: 1881. https://doi.org/10.3390/s17081881
APA StyleZhong, P., Li, Y. -T., Liu, W. -R., Duan, G. -H., Chen, Y. -W., & Xiong, N. (2017). Joint Mobile Data Collection and Wireless Energy Transfer in Wireless Rechargeable Sensor Networks. Sensors, 17(8), 1881. https://doi.org/10.3390/s17081881