1. Introduction
According to [
1], 68,085 US cases of firefighter injuries were recorded in 2015 with 29,130 occurrences during fire ground operations and a total of 64 firefighters died on-duty in the same year [
2]. The details of US firefighter injuries by type of duty during 2015 are illustrated in
Figure 1. In Vietnam, thousands of fires on different scales occur every year; for example, 2357 and 2792 fires were reported in 2014 and 2015, respectively [
3,
4]. This is an alarming signal for firefighters in the US, Vietnam, and other countries over the world because they constantly work and are faced with perils yet possess inadequate suitable supporting systems to protect their lives. There are several supporting systems such as the fall detection system, PASS (Personal Alert Safety System). Nevertheless, most of the fall detection systems are only intended for the elderly and patients with slow movement, which are certainly inapplicable for firefighters’ activities in their working environment. The PASS system was developed by Homeland Security to signal for aid via an audible alarm if on-ground firefighter’s incapacitation is detected [
5]. Furthermore, it can sense movement or loss of physical performance and activate a 95-decibel alarm if loss of physical performance exceeds a specific time period. However, in a real fire situation, there are a variety of noises like voices, cracking, sizzling of fire, the operation of fire protection systems, structure collapse, etc. Therefore, an audible alarm is not useful on a large scale. For instance, six and nine firefighters lost their lives in the fires in the Worcester cold storage and warehouse Co. at 266 Franklin street, Worcester, Massachusetts and The Charleston Sofa Super Store in Charleston, South Carolina respectively [
6,
7]. The proposed algorithms in this paper will be integrated with the indoor positioning system [
8] to detect on-duty firefighters’ fall events and loss of physical performances to protect their health and lives.
Although a number of publications have proposed methods to detect the fall events [
9] by the use of a camera [
10,
11,
12,
13,
14], and accelerometer in combination with other support sensors [
15,
16,
17,
18,
19]. Nevertheless, these publications mostly focus on detecting the fall events in the elderly or patients who walk slowly and execute low dynamic activities. Furthermore, using a camera for fall detection in fire conditions is not applicable because this is an invisible environment. Hence, this trend is insufficient in protecting firefighters who work on fire ground inside a building with physically demanding and complex activities.
The publication [
17] proposes a waist-mounted system that combines three-axis accelerometer, three-axis gyroscope, three-axis magnetometer, and barometer with four features: Impact, Aftermath, Posture, and Altitude variation to detect a fall event. In addition, this research also mainly focuses on the elderly’s fall events. Using a barometer in fall detection is a novel contribution of this publication, but it still shows huge limitations. The accuracy of the algorithm may be decreased because of environmental noise, the wearing positions, volunteer’s height, and the kind of barometer, etc. Furthermore, the experimental data in testing results are mostly intended for the elderly. Hence, it will be a huge limitation when applying this method on other subjects, especially in firefighters.
The publication [
20] (the Proetex project) proposed a system that integrates multi-sensors including external temperature sensor, heat flux sensor, accelerometers, motion sensor, CO sensor CO2 sensor, SPO2 sensor, heart, and breathing rate sensors. These sensors will record data and transmit data to the workstation through Wi-Fi module. The multi-sensor will monitor environment parameters effectively. Nevertheless, it will increase the cost of the system and complex computations. Furthermore, the fall detection algorithm in the Proetex project is still simple [
21]. Hence, the performance of the system may decline in several situations such as crawling then falling as proposed in this paper.
The publication [
22] proposed a wearable system to monitor the health of firefighters using the sensors to measure the respiration cycle and heartbeat. This method mainly focuses on monitoring physiological states of the users, yet it fails to keep track of firefighters’ activities or detect fall events in a fire ground. Hence, it cannot be applied to detect on-duty firefighters’ injuries. It is suitable to track the firefighter’s health state in normal conditions or during training.
To overcome the above deficiencies, this study proposes to develop a real-time, low-cost, and high-accuracy system using a 3-DOF accelerometer, 3-DOF gyroscope, 3-DOF magnetometer, barometer, and MQ7 sensor combined with development of the algorithms and the corresponding simulation process to support on-duty firefighters.
The paper has three novel contributions:
Firstly, the data fusion of three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer has been proposed for fall detection in firefighters. Several publications have integrated these sensors for fall detection, but these methods mainly focus on detecting fall events for the elderly who do not perform any complex and strenuous activities and the thresholds within which to detect the fall events in firefighters are also different from those with the elderly. Furthermore, most of the datasets in previous publications were recorded from students, elders, or other volunteers other than firefighters. As a result, they are not really effective in detecting the fall events in the firefighters who perform complex and strenuous activities in fire environments.
Secondly, three proposed features comprising upper threshold, post-fall, and posture recognition are combined for fall detection. The combination of the theta (T) angle, pitch (P) angle, and roll (R) angle proves to be efficient. Furthermore, checking twice with an interval of 0.5 s in posture recognition feature enhances the accuracy of our proposed fall detection algorithm.
Thirdly, the proposed system has an integrated barometer to detect loss of physical performance because using 3-DOF accelerometer, 3-DOF gyroscope, and 3-DOF magnetometer to detect loss of physical performance is not strong enough. It will cause false warnings while the elevator is in use. Furthermore, long-time verification may cause death or permanent health damage in firefighters.
Finally, CO gas or the so-called “silent killer” gas is one of the most dangerous gases emitted from combustion. This gas can be seriously detrimental to firefighters’ health. Hence, the MQ7 sensor has been integrated into our proposed supporting system to optimize the use of self-contained breathing apparatuses (SCBA).
Our proposed system combines fall detection algorithm, loss of physical performance detection to confirm whether the user is suffering from fall, loss of physical performance or not. Moreover, it is also capable of using CO detection module to monitor the CO level on the fire ground. If the concentration is high, it then alerts firefighters to use SCBA. Otherwise, it will indicate the safety signal on the low concentration to save fresh air for more urgent situations.
3. Method
Figure 5 is the flowchart for fall detection and detection for firefighters. It can be seen from the flowchart that the fall detection module consists of three features: Upper threshold, post-fall, and posture recognition. The loss of physical performance detection includes two main features: Altitude threshold and loss of physical performance threshold. The key condition for fall detection that is
when RMS of acceleration exceeds the
threshold value. In contrast, the loss of physical performance algorithm will work when
.
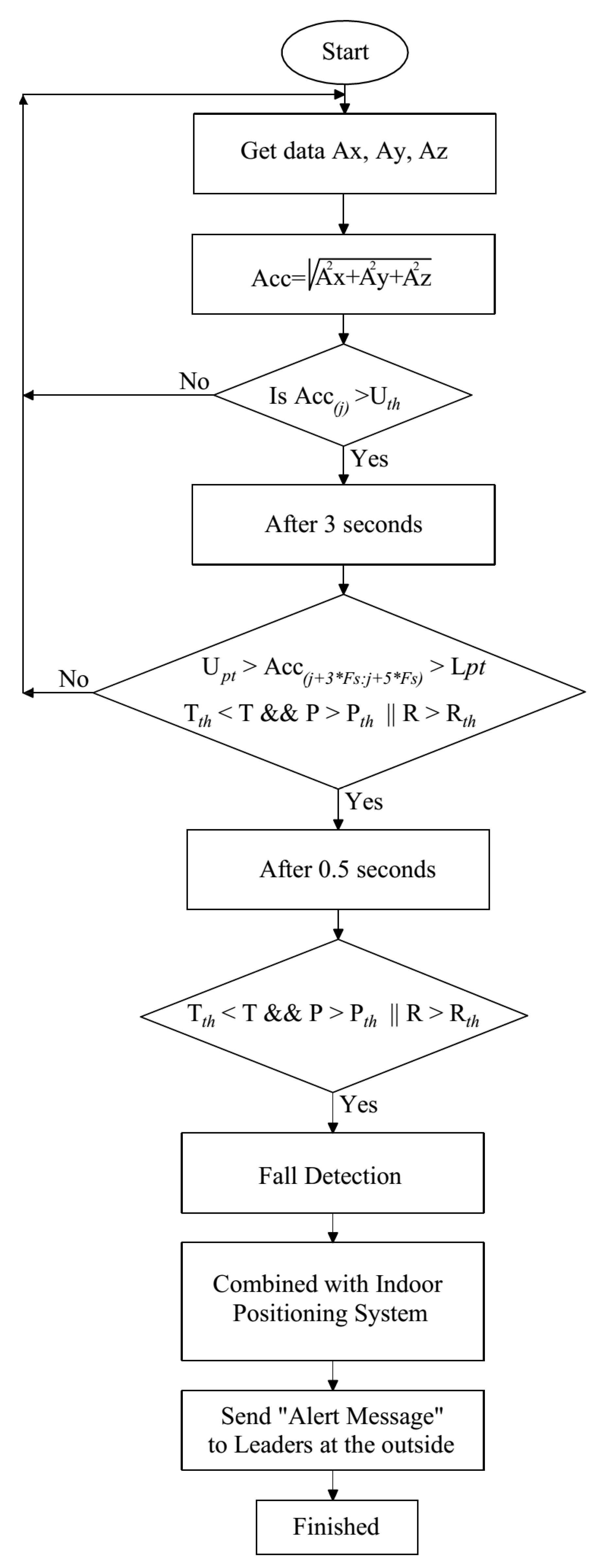
3.1. The Proposed Fall Detection Algorithm for Firefighter
Figure 6 shows our proposed fall detection algorithm. The algorithm combines the use of three kinds of sensors: 3-DOF accelerometer, 3-DOF gyroscope, and 3-DOF magnetometer. The data fusion of these sensors has proved effective through our proposed algorithms. The difference among the fall detection algorithm in this paper, our previous fall detection algorithm, and other publications is the subjects. Most of the previous publications focus on detecting fall events in the elderly, children, or patients who obviously have less complex and lower dynamic activities than firefighters. In this paper, we focus on detecting the fall for firefighters who are working under fire conditions inside a building.
In our previous publication, we have proposed to use acceleration data and three modules (including Fall detection module, Posture recognition module, and Post-fall recognition module) to detect the fall events in the elderly with noticeable results. Nevertheless, this proposed method is used to detect falls of the elderly who have less complicated and physical demanding activities than those undertaken by firefighters. There are several scenarios that require strenuous activities such as running, walking, jogging while others just require moderate ones like scrawling, standing in elevator. Our previous publication and others do not cover any new activities and situations for firefighters such as crawling, crawling then falling. Therefore, the barometer has been integrated in our system to enhance the accuracy and performance of our proposed system. Four sensors will acquire data at the same time and with the same frequency. To detect the fall events in firefighters, we have proposed the three following features:
Upper Threshold. At the fall state, after the volunteer’s loss of contact with the ground, their body will drop to “flight of fall” period. Due to the effect of gravity force, when the body initially contacts the ground or other objects, it will create a sudden change in acceleration data. Hence, using the upper threshold to detect the sudden increase in acceleration data has essential meaning. The upper threshold value also plays an important role in the accuracy and performance of the proposed system as well. In this research, we mainly focus on detecting the fall events for firefighters who are working in fire scenarios in buildings with high dynamics and low dynamic activities such as running, walking, crawling on the ground, or going up/down stairs.
where,
is the acceleration data at the sample of j;
is the threshold to check the acceleration excess.
Post-Fall. After the “flight of fall” period, the body will fluctuate in a short time before changing to the rest state. In the rest state, the RMS of accelerations in three axes is around 1 g. Postfall thresholds include upper and lower thresholds. Based on the experimental testing results, the rest state will be checked after the signal exceeds the upper threshold value by 3 s and the upper and lower thresholds of the post fall feature equal 1.25 and 0.75 g, respectively in this research. When RMS acceleration is greater and smaller than
and
thresholds within 2 s, respectively. The post-fall will confirm that a fall event has occurred.
where,
is the upper threshold to check post-fall condition,
is the lower threshold to check post-fall condition.
Posture Recognition. After falling, the posture of the body will change. Hence, the roll, pitch, and yaw angles will change in comparison with the reference frame. In this research, the reference frame is the Earth frame. The changing of the posture means the changing in angles of roll, pitch, and yaw angles with the reference frame. The roll and pitch angles are used to estimate the posture of the firefighter after falling. Based on these, we proposed posture recognition threshold to distinguish between the on-duty activities and fall events.
Furthermore, the theta (T) angle will change when the fall event occurs. Hence, the use of theta angle, pitch angle, and roll angle in the fall detection algorithm are of great importance in our proposed algorithm.
- Condition 1: The angle between Az and gravity estimation:
The accelerometer is positioned in the front trouser pocket as Figure 10a. Thus, the
angle in the standing state is around 0°, and it changes when the device carrier is standing. The postures of the firefighter are detected using Equation (9) to determine the difference between
angle and the gravitational acceleration.
The angle is used to check the postures of the firefighter to confirm the fall event and remove fall positive events in our proposed system.
- Condition 2: The orientation estimation:
In this case, we will apply Madgwick orientation filter in eliminating noise for inertial measurement unit (IMU). The Euler angles represents the difference between the reference frame and the sensor frame defined by the following equations [
28]:
where,
,
, and R are the yaw, pitch, and roll of the Euler angles that rotate around the Az, Ay, and Ax axes of the reference frame, respectively.
Combination of Condition 1 and Condition 2:
In our proposed fall detection algorithm, the theta angle, pitch angle, and roll angle have been combined to enhance the sensitivity and accuracy of our proposed algorithm. Furthermore, the double check with an interval of 0.5 s also has been proposed in this paper to improve the accuracy of our proposed system. The detail of this combination is shown in
Table 2.
Our support system is integrated with the indoor positioning system to track and locate firefighters for real-time alert in the case of injuries and send this message to the commander at the outside of the building. Then, based on the real-scenarios, the commander can decide the methods to rescue injured firefighters to safety.
As can be seen from
Figure 6, when the Acc signal exceeds the upper threshold (
), after 3 s, the post-fall and posture recognition features are used to verify the fall event.
In the case of all these features being satisfied, the fall event will be confirmed, then the “Alert message” will be sent to the commander through the indoor positioning system. The fall event will be eliminated when one of these conditions is not met.
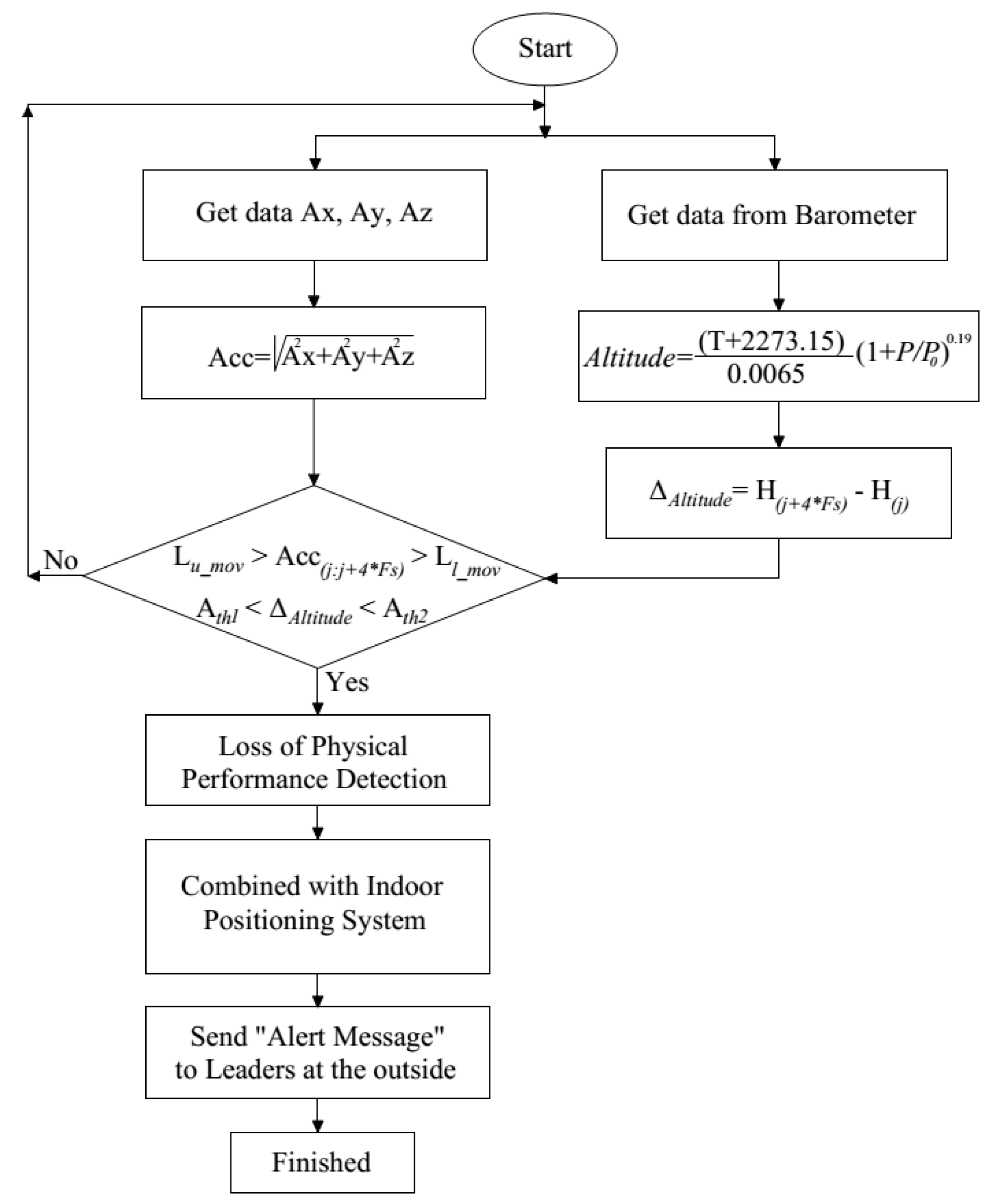
3.2. The Proposed Loss of Physical Performance Detection Algorithm for Firefighter
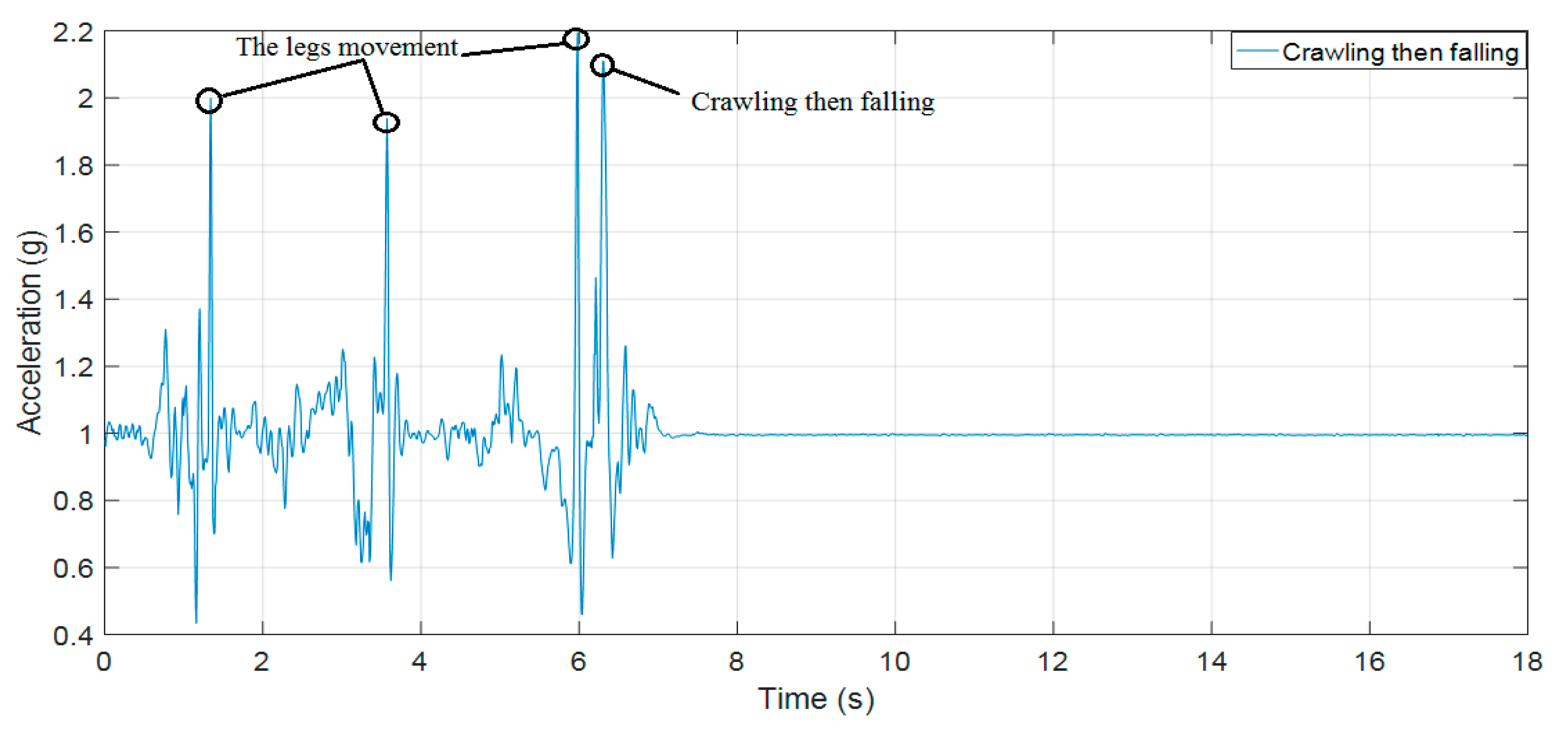
There are several kinds of fall events such as crawling then falling or getting stuck in narrow paths and spaces. The application of the previous algorithms to detect the accelerations that exceed the threshold are not applicable to these situations. The use of thresholds to detect the excess of acceleration may fail to detect firefighters’ injuries while the selection of a lower threshold value can increase the sensitivity of the proposed algorithm but the accuracy will decrease significantly and vice versa. Therefore, fall detection algorithms proposed in the previous publications are not very effective in these situations.
To solve these limitations, we have proposed the loss of physical performance algorithm. The loss of physical performance algorithm is an essential part of our proposed algorithm to detect accident events of firefighters. The data fusion between barometric and 3-DoF acceleration will help solve the existing limitations.
•
Loss of Physical Performance Threshold. This threshold is applied as firefighters work in an invisible environment and need to pass through narrow paths and spaces, as shown in
Figure 7:
The fall detection algorithm used only to detect the accident involving firefighters is not enough. Hence, the loss of physical performance feature is necessary in the case of being stuck or having an accident in these scenarios (see
Figure 8). Based on Equation (18), when a firefighter is not moving or falling while crawling; the “Alert message” will be sent to the commander on the outside of the building to save his life. In this research, we propose that the loss of physical performance threshold value be equal to 4s.
•
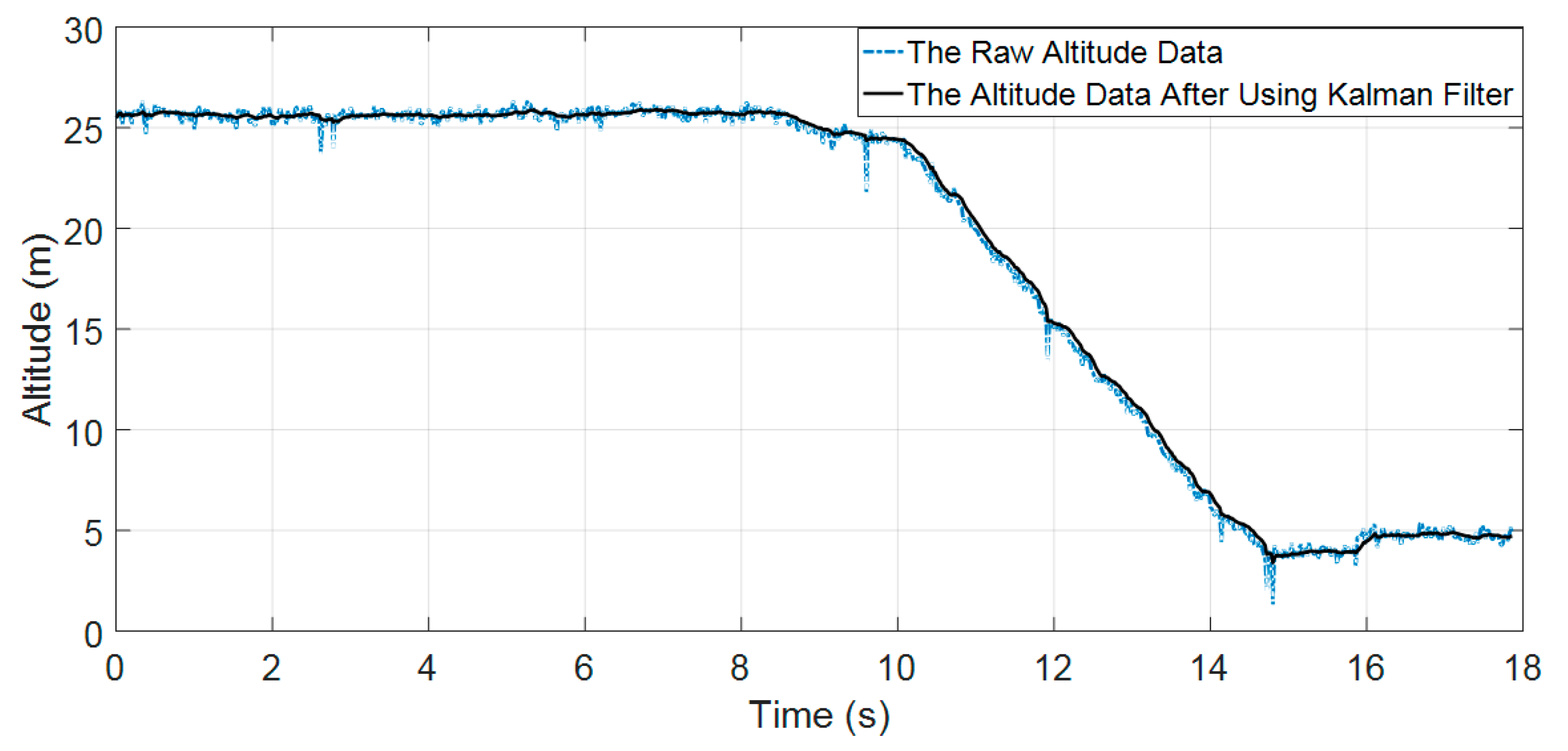
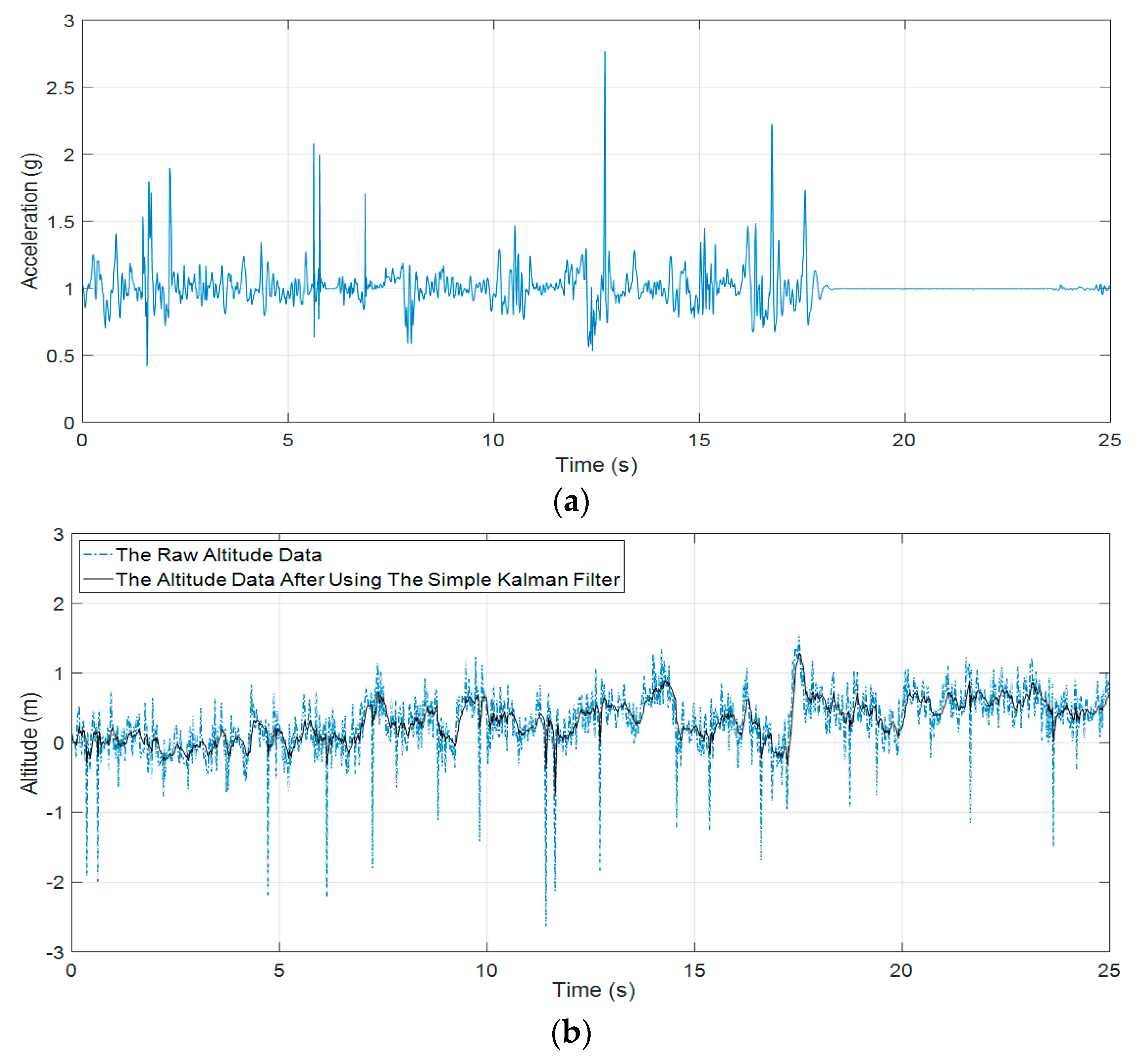
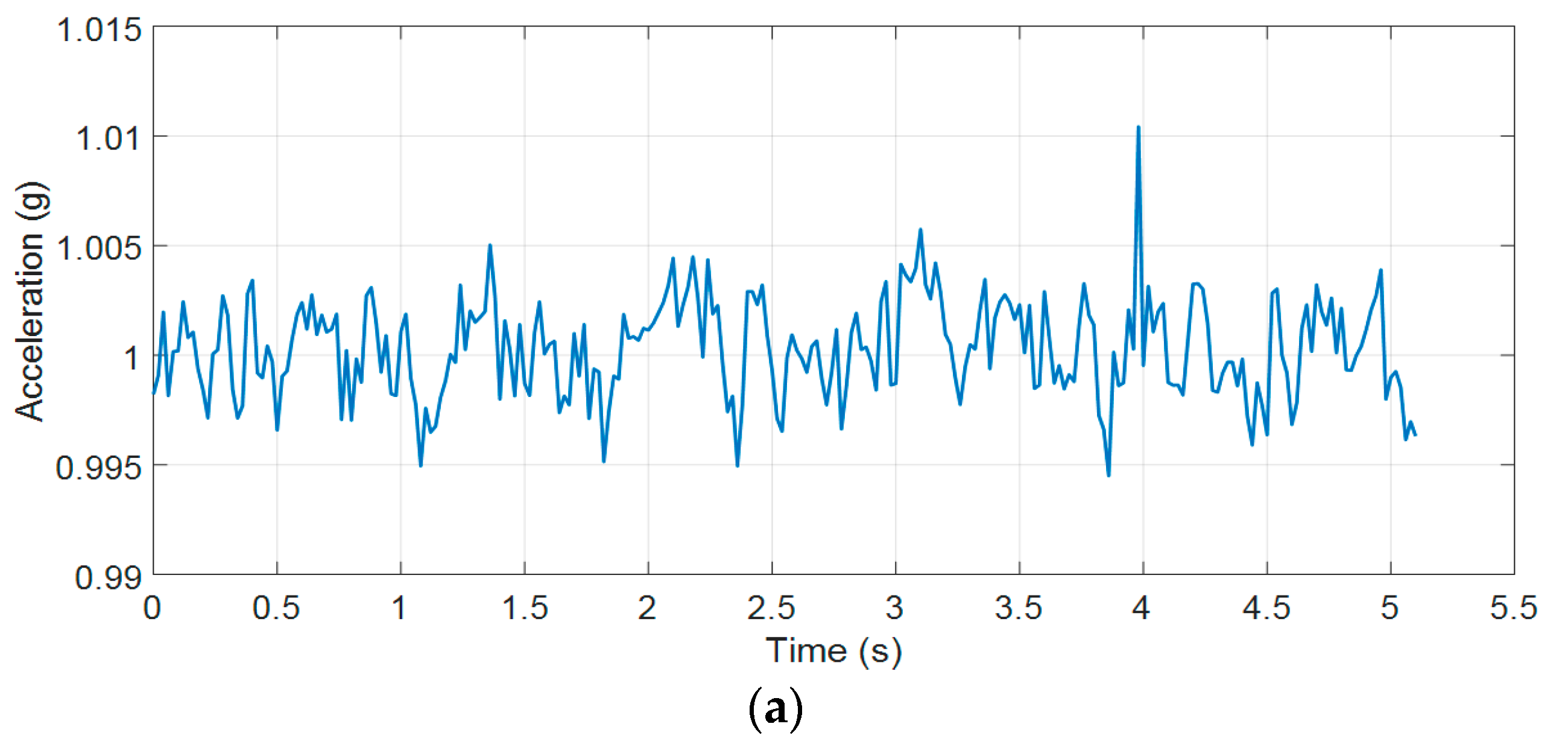
Altitude Threshold. The barometer is integrated in our proposed system and mounted in a front trouser pocket of volunteers. After using the simple Kalman filter to eliminate abnormal parts and the vibrations in data that is recorded from the barometer, the signal is quite clean and stable. When RMS accelerations satisfy Equation (13), the altitude information will be used to predict the state of volunteers.
Based on the predicted result by fusion the data of both barometer and 3-DOF accelerometer, the loss of physical performance event will be confirmed when Equation (18) is satisfied.
Furthermore, the results of Equation (16) and Equation (17) are used to estimate the floor in our proposed indoor positioning system.
3.3. CO Detection Algorithm for Firefighter
After being recorded, the raw data will be preprocessed to eliminate abnormal parts in the signals. The simple Kalman filter is also used to detect the CO level in our proposed CO detection algorithm, as shown in
Figure 9.
As presented in
Figure 9, the MQ7 sensor will be used to record CO data after calibration. Blood Carboxyhemoglobin (COHb) levels corresponding to adverse health effects of CO [
26]. The CO data will be preprocessed then compared with the proposed threshold which is achieved through the statistical analysis and signs and symptoms of COHb level as shown in
Table 3 that published in [
26].

 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}