Application of the TDR Soil Moisture Sensor for Terramechanical Research †



Abstract
:1. Introduction
2. Materials and Methods
2.1. Off-Road Vehicle Mobility Tests
- time to reach v = 30 km/h, tV30;
- time to pass the test distance (approx. 500 m), t500;
- absolute mobility in the sense of “go-no go”, GNG (value = 1 for “go”, value = 0 for “no go”);
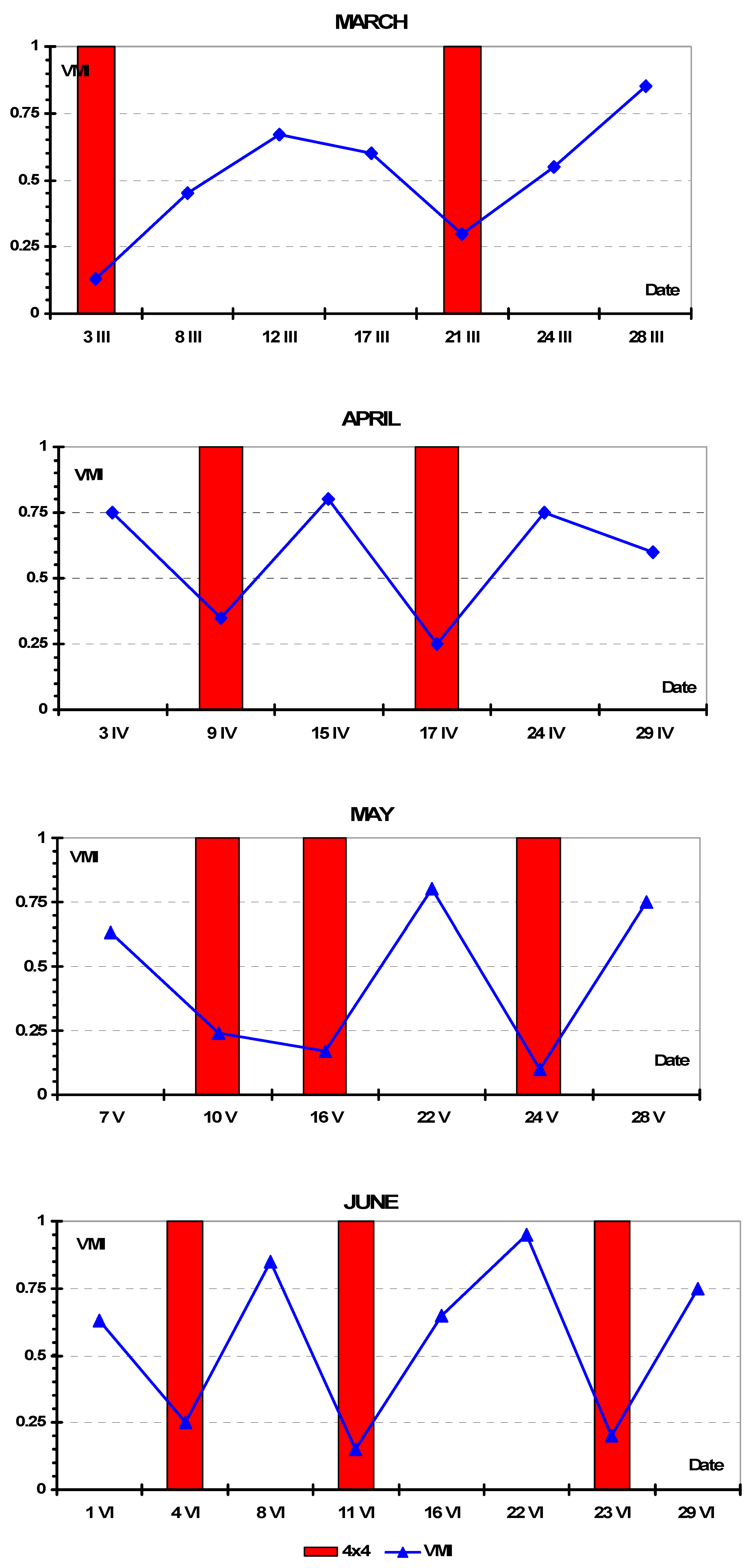
- a need to use the 4 × 4 drive, AWD—All Wheel Drive (value = 1 for those tests where there was no need to switch to 4 × 4 mode, and value = 0, when the 4 × 4 drive was required to pass the test distance).
- tv30, longitudinal dynamics of the vehicle motion, in terms of the time of vehicle acceleration, from stop to reaching a velocity of 30 km/h, related to the dry asphalt conditions;
- t500, longitudinal dynamics of the vehicle motion, in terms of the time to drive the distance of 500 m, related to the dry asphalt conditions;
- GNG, the absolute mobility, quantified by means of the number of “go” cases observing during the tests; and
- AWD, the number of cases when the 4 × 4 mode was not required to pass the test.
2.2. Monitoring of Turf Moisture Content of a Grassy Airfield
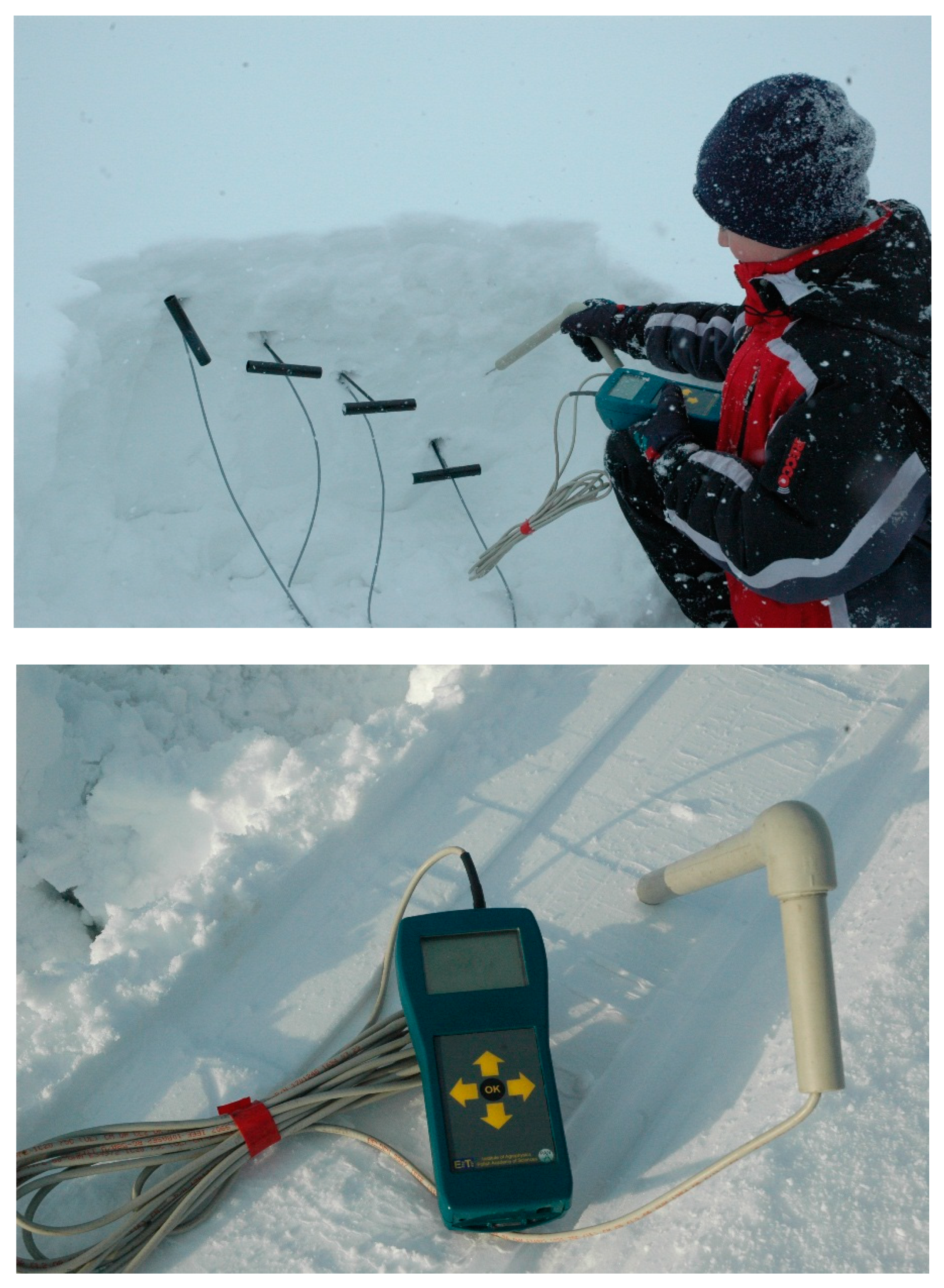
2.3. Determining the Snow Density by Means of Snow Moisture Measurements
3. Results
3.1. Effects of Soil Moisture Upon Off-Road Vehicle Mobility
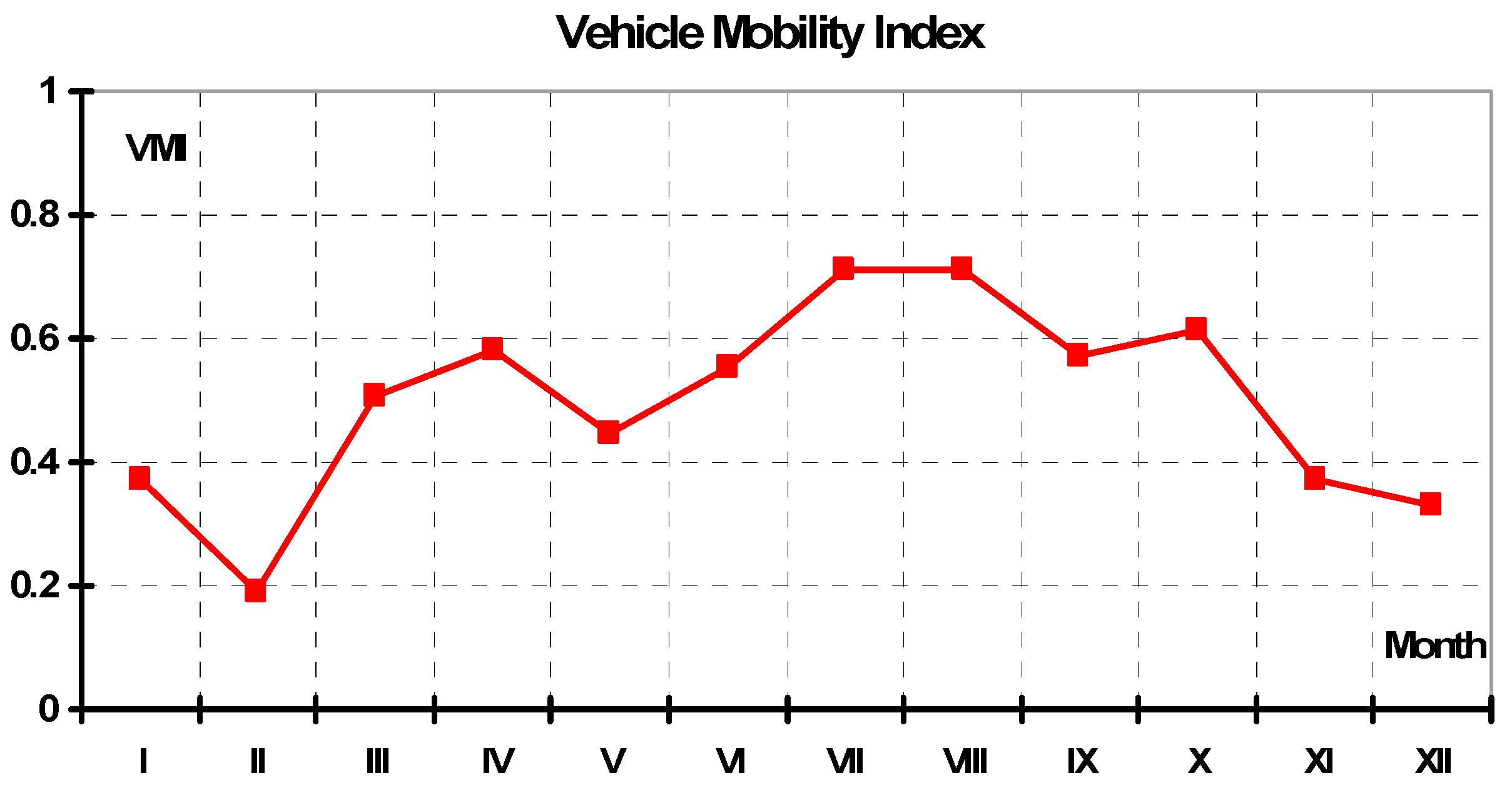
- Spring—a tendency for mobility values to increase in the early spring months, then strong dynamics in mobility value, especially in June;
- Summer—high dynamics of mobility in early summer, then almost stable at approximately the 75% level;
- Autumn—a tendency for mobility values to decrease with no dynamic changes, with an average mobility of 30–40%; and
- Winter—a tendency for mobility values to decrease at the beginning, then remain almost stable, with rather low values. At the end of this season, in March, there was an increase in mobility value together with some dynamics.
- Spring—8 instances of 4 × 4 switching in a total of 20 tests;
- Summer—2 instances of 4 × 4 switching in 16 tests;
- Autumn—8 instances of 4 × 4 switching in 15 tests;
- Winter—10 instances of 4 × 4 switching in 19 tests.
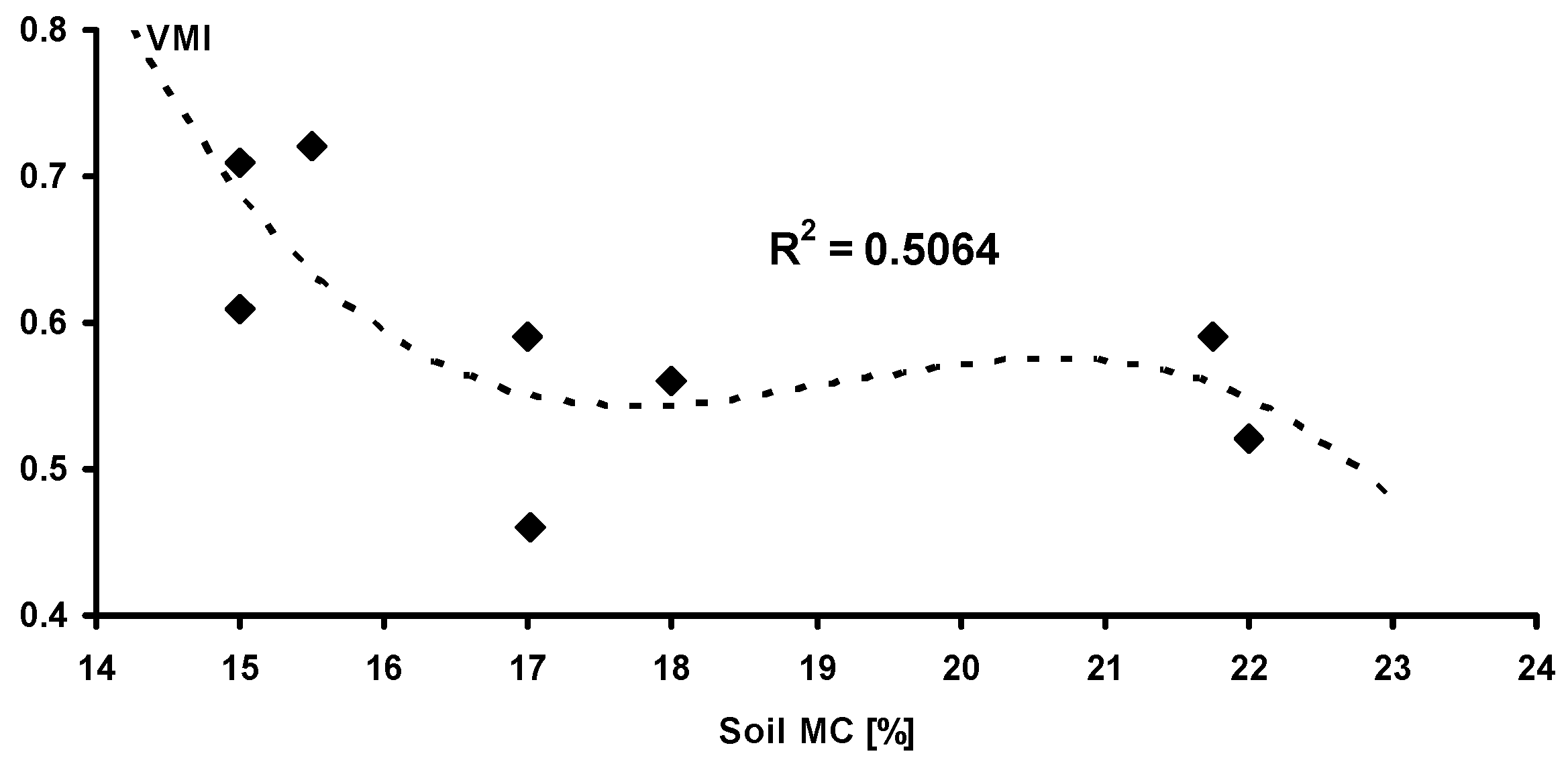
3.2. Relationship Between Vehicle Mobility and Soil Moisture
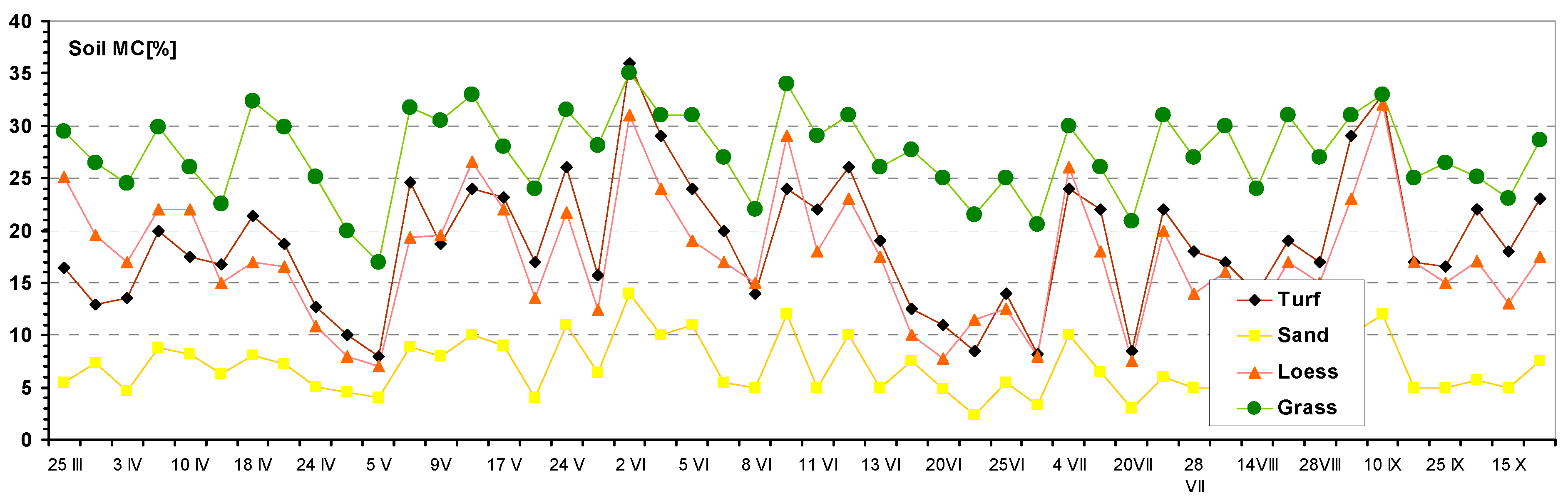
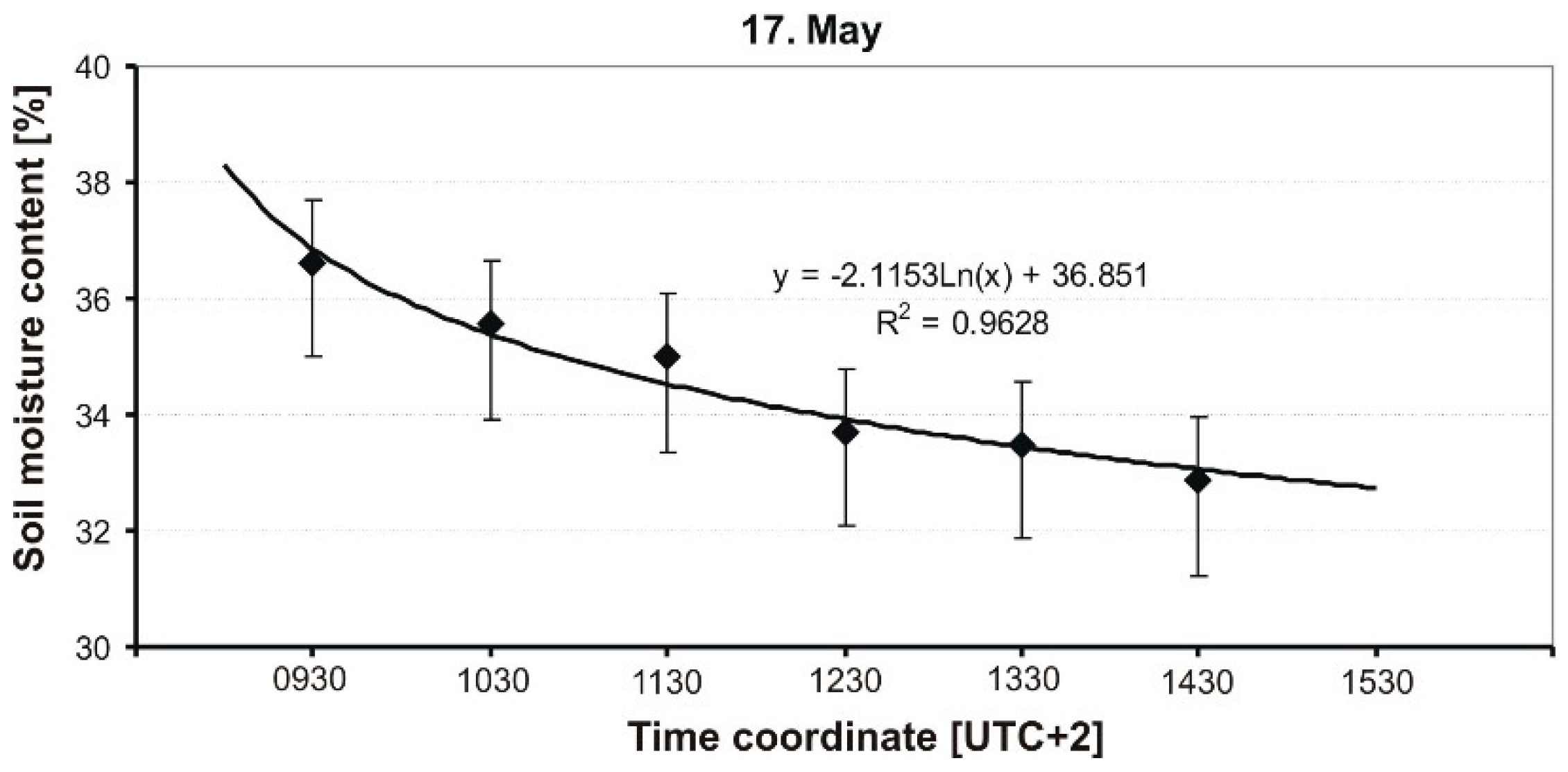
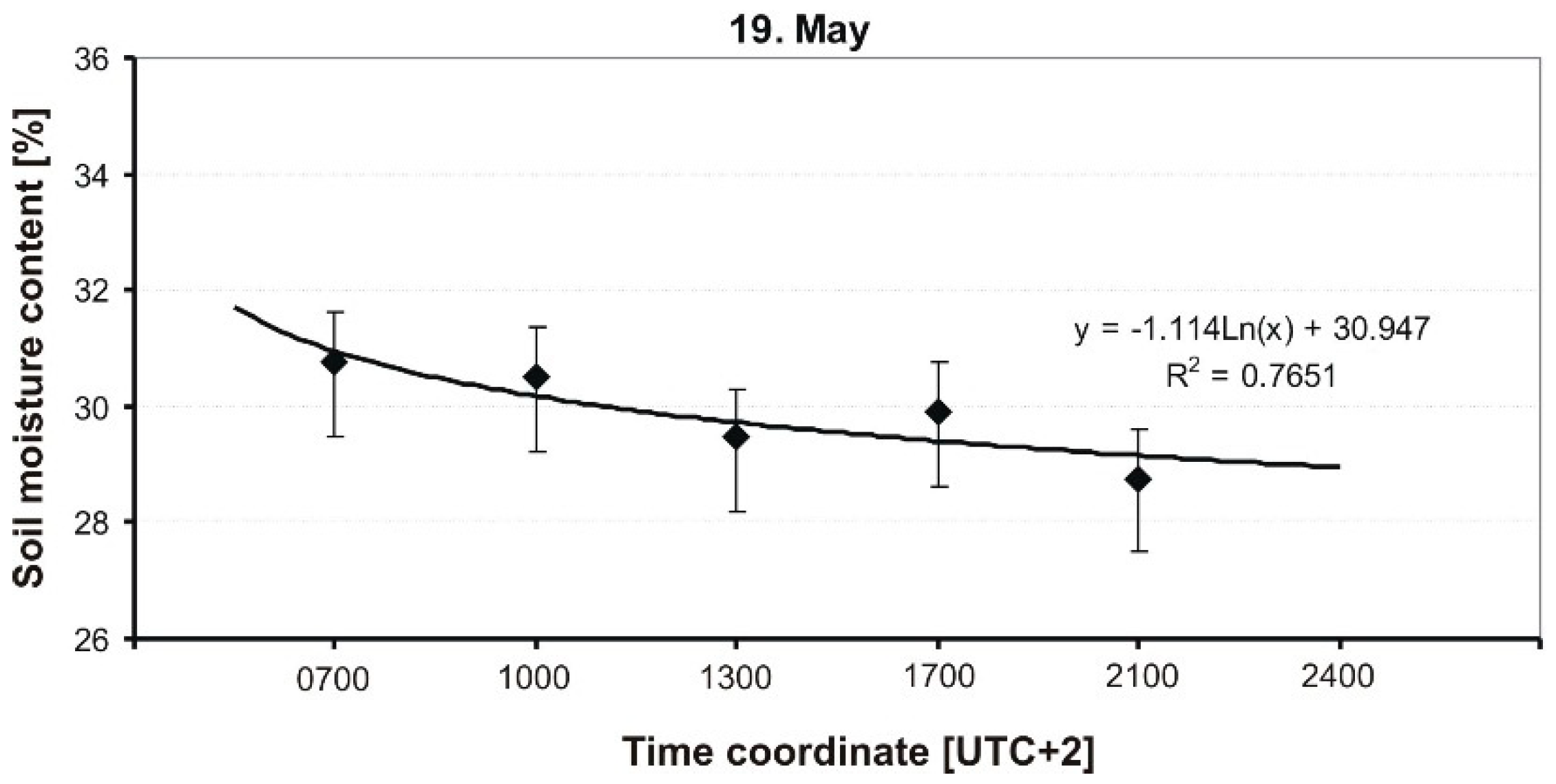
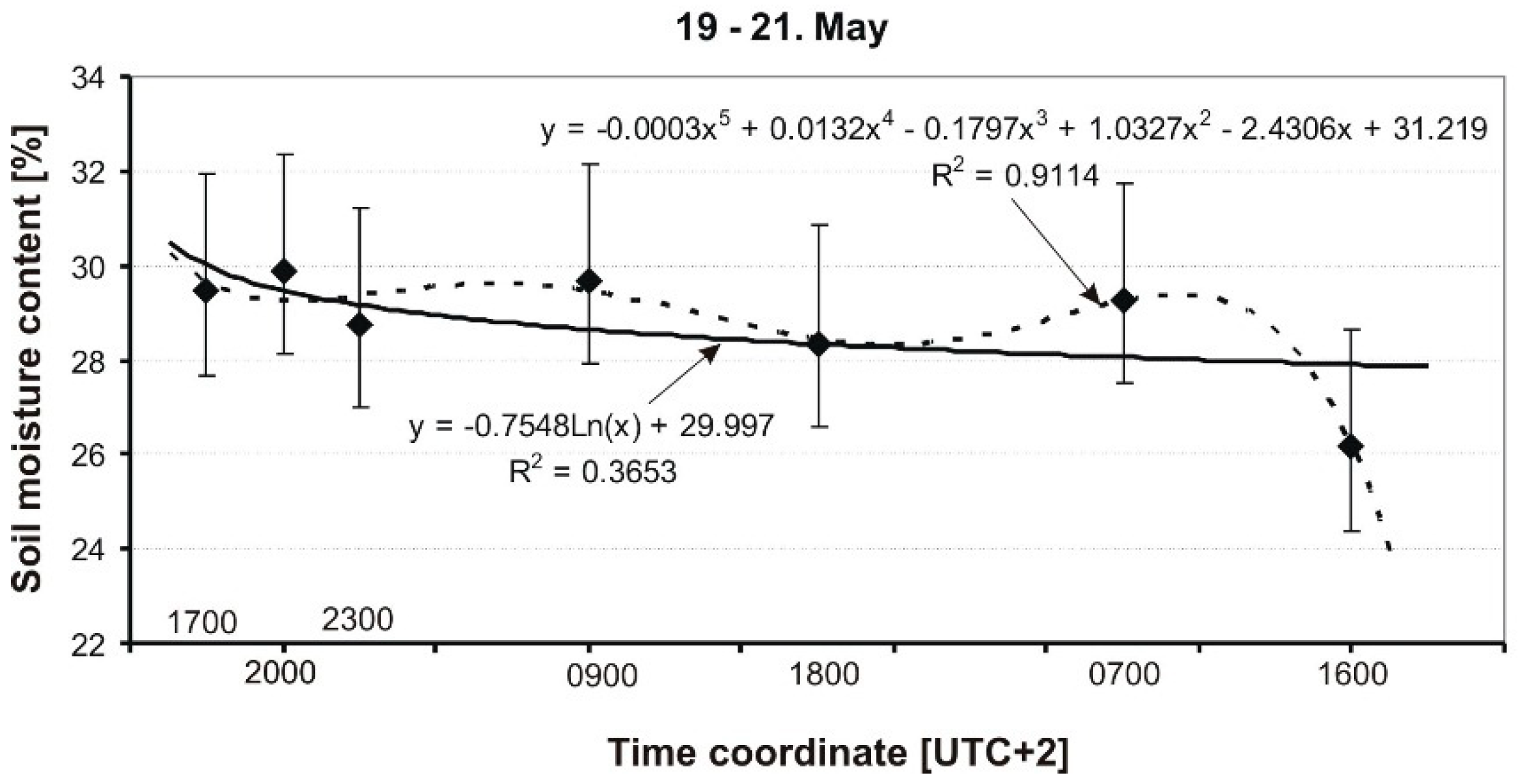
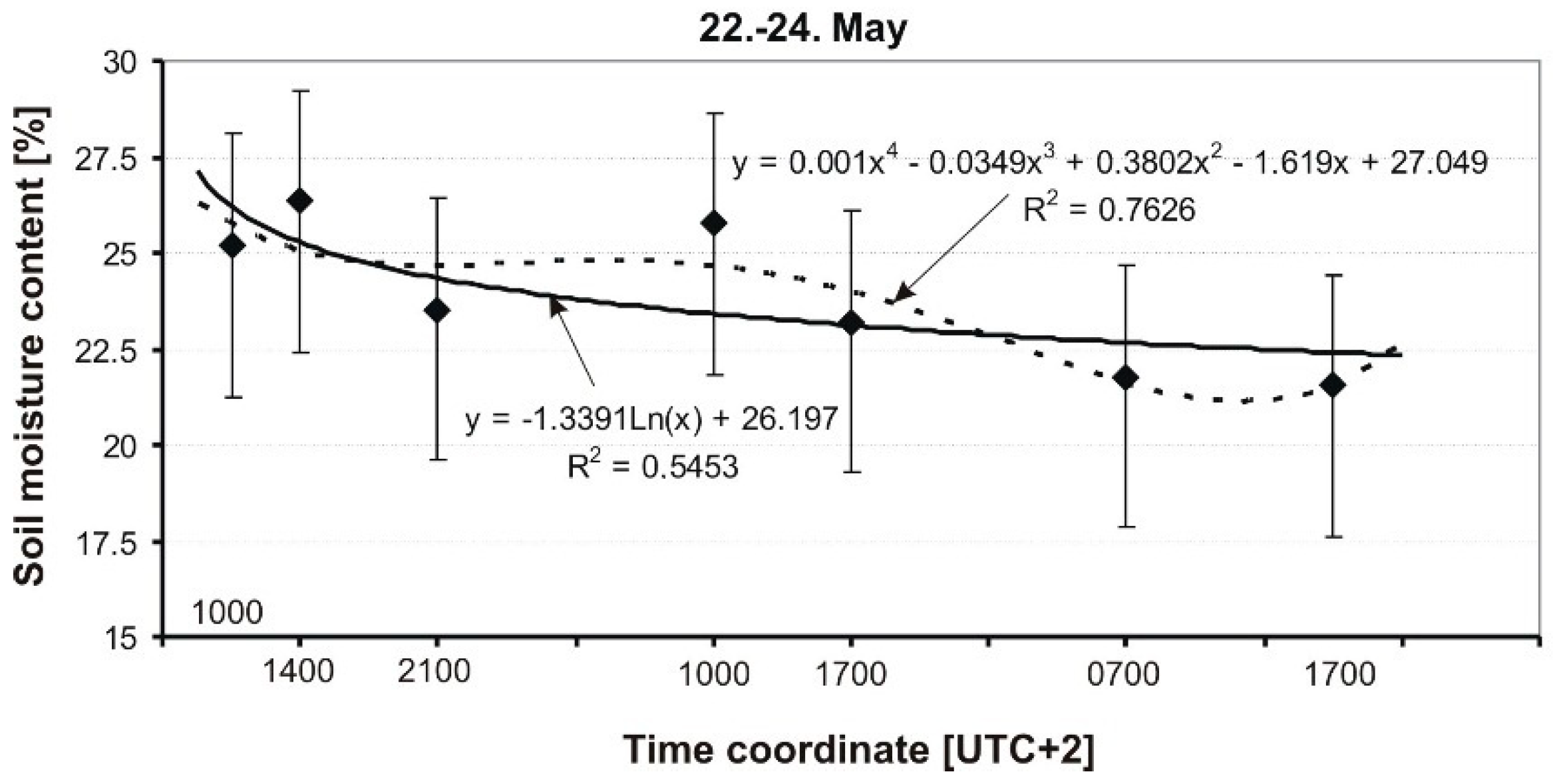
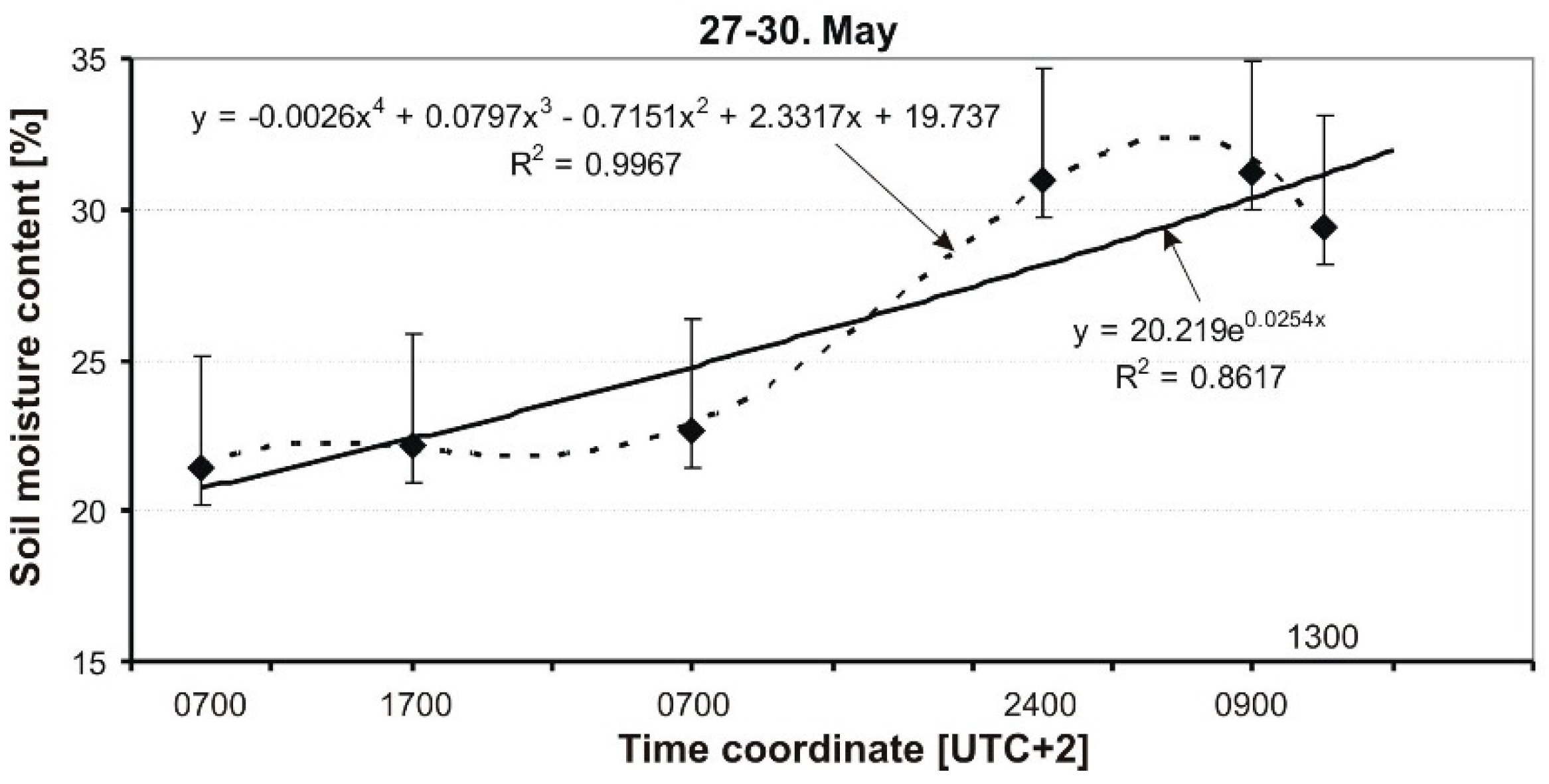
3.3. Dynamics of Soil Moisture Content of A Grassy Runway
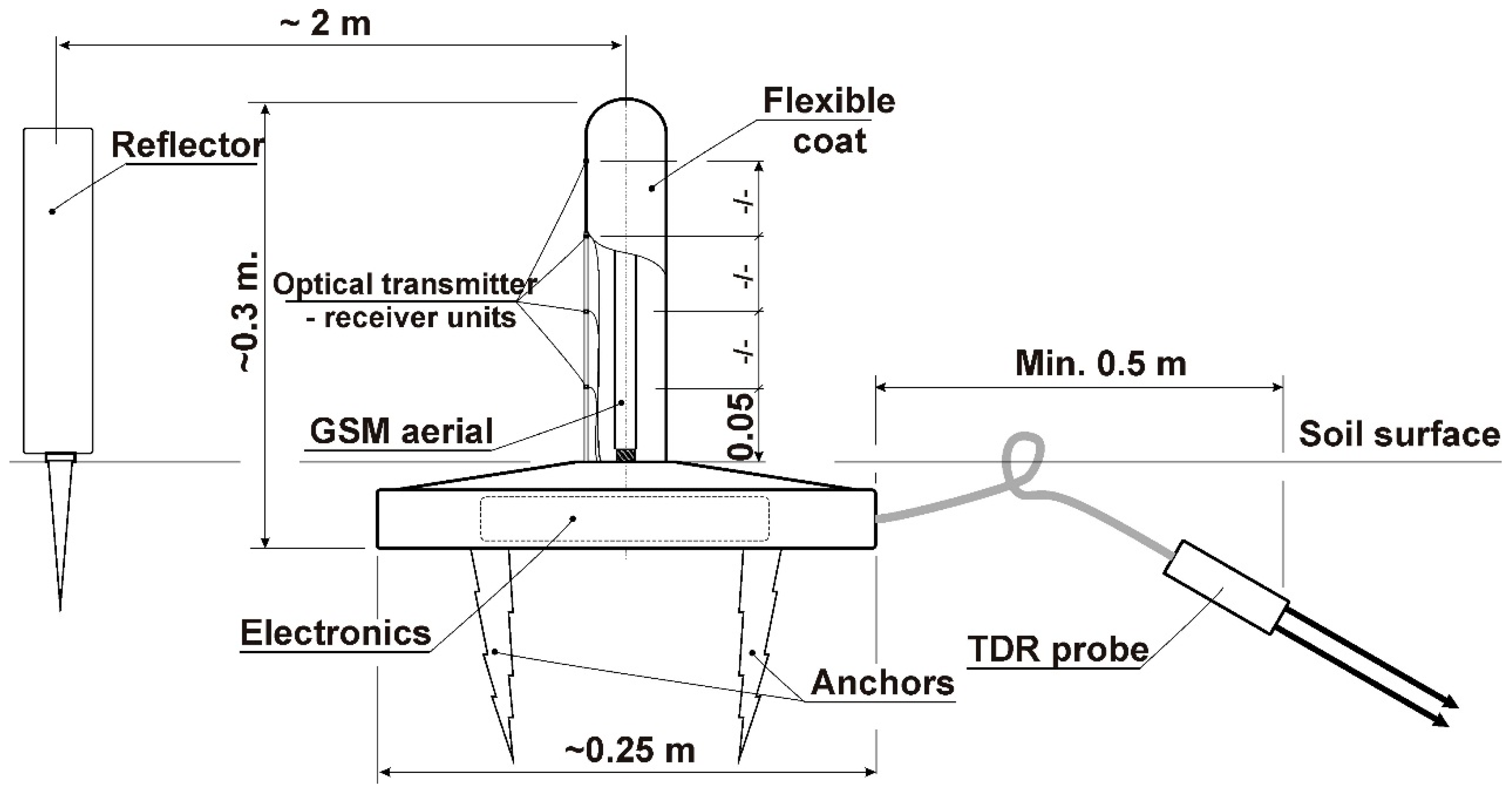
3.4. Design Idea of a Field Sensor for Soil MC Remote Measurements
- -
- a TDR sensor for soil moisture content measurements, and
- -
- a grass high sensor.
- -
- adding a water- and dust-resistant case of a higher mechanical strength in order to ensure safe operation in the field;
- -
- installation of a high capacity, highly efficient power supply that would allow for long time operation; and
- -
- adding communication ports for linking with external devices and a miniature universal serial bus (USB) port.
3.5. Snow Density
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dąbrowski, J.; Pytka, J.; Tarkowski, P.; Zając, M. Advantages of all-season versus snow tyres for off-road traction and soil stresses. J. Terramechan. 2006, 43, 163–175. [Google Scholar] [CrossRef]
- Pytka, J.; Dąbrowski, J.; Zając, M.; Tarkowski, P. Effects of reduced inflation pressure and vehicle loading on off-road traction and soil stress and deformation state. J. Terramechan. 2006, 43, 469–485. [Google Scholar] [CrossRef]
- Shoop, S.A.; Young, B.; Alger, R.; Davis, J. Effect of Test Method on Winter Traction Measurements. J. Terramechan. 1994, 31, 153–161. [Google Scholar] [CrossRef]
- Collins, J.G. Forecasting Trafficability of Soils. Report 10 in Technical Memorandum No. 3–331; US Army Engineer Waterways Experimental Station: Vicksburg, MI, USA, 1971.
- Anderson, M.G. On the Applicability of Soil Water Finite Difference Models to Operational Trafficability Models. J. Terramechan. 1983, 20, 139–152. [Google Scholar] [CrossRef]
- Ghezzehei, T.A.; Or, D. Rheological properties of wet soils and clays under steady and oscillatory stresses. Soil. Sc. Soc. Am. J. 2001, 65, 624–637. [Google Scholar] [CrossRef]
- Ciobotaru, T. Semi-Empiric Algorithm for the Assessment of the Vehicle Mobility. Leonardo Electron. J. Pract. Technol. 2009, 15, 19–30. [Google Scholar]
- Pytka, J. A semiempirical model of a wheel-soil system. Int. J. Auto. Technol. 2010, 11, 681–690. [Google Scholar] [CrossRef]
- Pytka, J.; Tarkowski, P.; Fijałkowski, S.; Budzyński, P.; Dąbrowski, J.; Kupicz, W.; Pytka, P. An Instrumented Vehicle for Off-Road Dynamics Testing. J. Terramechan. 2011, 48, 384–395. [Google Scholar] [CrossRef]
- Shoop, S.A.; Diemand, D.; Wieder, W.L.; Mason, G.L.; Seman, P.M. Predicting California Bearing Ratio from Trafficability Cone Index Values; CRREL TR-08-17 Technical Report; Defense Technical Information Center: Fort Belvoir, VA, USA, October 2008.
- Pytka, J. Identification of Rolling Resistance Coefficients for Aircraft Tires on Unsurfaced Airfields. J. Aircr. 2014, 51, 353–360. [Google Scholar] [CrossRef]
- Pytka, J.; Tarkowski, P.; Budzyński, P.; Józwik, J. Method for Testing and Evaluating Grassy Runway Surface. J Aircr. 2017, 54, 229–234. [Google Scholar] [CrossRef]
- Pytka, J. Determination of snow stresses under vehicle loads. Cold Reg. Sci. Technol. 2010, 60, 137–145. [Google Scholar] [CrossRef]
- Stacheder, M. TDR and low-frequency measurements for continuous monitoring of moisture and density in a snow pack. Int. Agrophys. 2005, 19, 75–78. [Google Scholar]
- Stacheder, M.; Koeniger, F.; Schuhmann, R. New Dielectric Sensors and Sensing Techniques for Soil and Snow Moisture Measurements. Sensors 2009, 9, 2951–2967. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pytka, J.; Laskowski, J.; Tarkowski, P. A New Method for Testing and Evaluating Grassy Airfields and its Effects upon Flying Safety. Sci J. Silesian Uni. Technol Series Transp. 2017, 95, 171–183. [Google Scholar] [CrossRef]
- Pytka, J.; Łyszczyk, T.; Józwik, J.; Gnapowski, E. Design of Integrated Field Sensor for Grassy Runway Conditions Monitoring System. In Proceedings of the 2018 12th International Conference on Electromagnetic Wave Interaction with Water and Moist Substances (ISEMA), Lublin, Poland, 4–7 June 2018. [Google Scholar]
- Cook, L. Getting high off grass. Kitplanes. October 2016, pp. 24–27. Available online: http://www.kitplanes.com/issues/33_10/builder_spotlight/Getting-High-Off-Grass_21643-1.html (accessed on 6 May 2019).
- Garrison, P. Sunday Drive. Flying. August 2013, pp. 40–42. Available online: https://www.flyingmag.com/technique/accidents/aftermath-sunday-drive (accessed on 6 May 2019).
- Hirschman, D. No Runway? No Problem. AOPA Pilot. March 2014, pp. 58–65. Available online: https://www.aopa.org/news-and-media/all-news/2014/march/pilot/1403p_stol (accessed on 6 May 2019).
- Landsberg, B. Soft field, soft thinking. Who Is Responsible for a Takeoff Gone Wrong? AOPA Pilot. September 2016, p. 20. Available online: https://www.aopa.org/news-and-media/all-news/2016/september/pilot/safety-pilot (accessed on 6 May 2019).
- Mauch, H.; Kutschke, E. Tiefe Boden–Hohe Kunst? Fliegermagazin, 11 December 2015; 64–67. [Google Scholar]
- O’Quinin, R. Grass Landing. Sport Aviation, 1 July 2010; 76. [Google Scholar]
- Pytka, J.; Łyszczyk, T.; Gnapowski, E. Monitoring Grass Airfield Conditions for the GARFIELD System. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018. [Google Scholar]
- Józwik, J.; Pytka, J.; Tofi, A. Experimental Identification of Grassy Airfield Surface Geometry for the GARFIELD Database. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grooming Machine Experiment | ||||
| Depth | 0–10 cm | 10–20 cm | 20–30 cm | 30–40 cm |
| TDR, ε | 1.07 | 1.17 | 1.25 | 1.46 |
| Snow density [kg/m3] | 129 | 311 | 447 | 778 |
| Airplane Experiment | ||||
| Snow | Undisturbed snow | Compacted snow-ski | Compacted snow-wheel | |
| TDR, ε | 1.256 (0.027) | 1.340 (0.015) | 3.318 (0.363) | |
| Snow density [kg/m3] | 447 | 612 | 1309 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pytka, J.; Budzyński, P.; Kamiński, M.; Łyszczyk, T.; Józwik, J. Application of the TDR Soil Moisture Sensor for Terramechanical Research. Sensors 2019, 19, 2116. https://doi.org/10.3390/s19092116
Pytka J, Budzyński P, Kamiński M, Łyszczyk T, Józwik J. Application of the TDR Soil Moisture Sensor for Terramechanical Research. Sensors. 2019; 19(9):2116. https://doi.org/10.3390/s19092116
Chicago/Turabian StylePytka, Jarosław, Piotr Budzyński, Mariusz Kamiński, Tomasz Łyszczyk, and Jerzy Józwik. 2019. "Application of the TDR Soil Moisture Sensor for Terramechanical Research" Sensors 19, no. 9: 2116. https://doi.org/10.3390/s19092116
APA StylePytka, J., Budzyński, P., Kamiński, M., Łyszczyk, T., & Józwik, J. (2019). Application of the TDR Soil Moisture Sensor for Terramechanical Research. Sensors, 19(9), 2116. https://doi.org/10.3390/s19092116