Estimating Departure Time Using Thermal Camera and Heat Traces Tracking Technique


Abstract
:1. Introduction
2. Materials and Methods
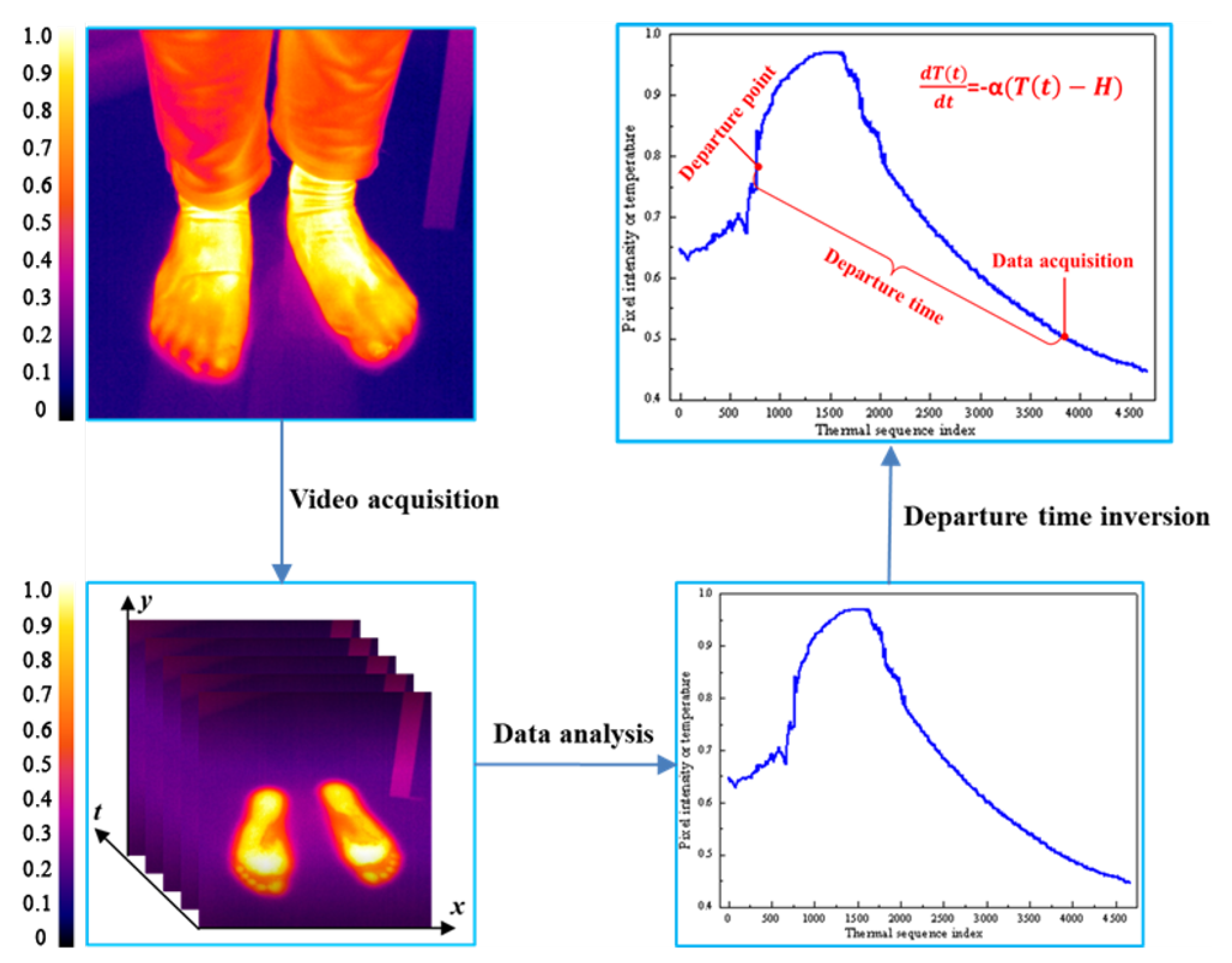
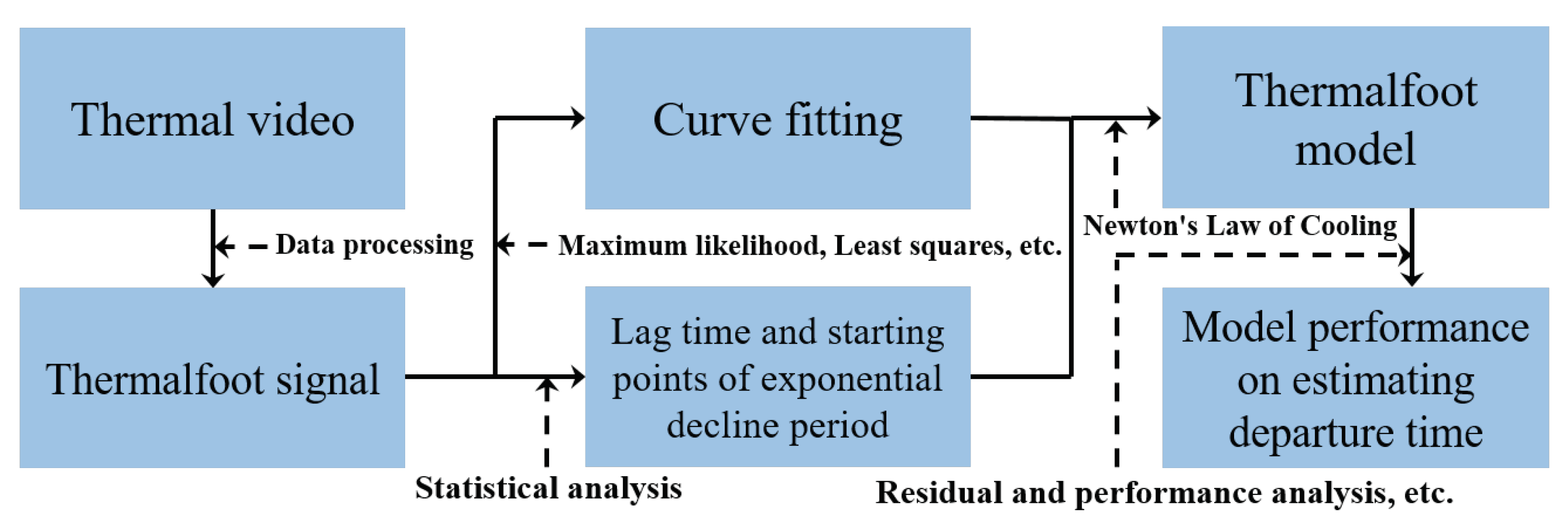
2.1. Framework of Thermalfoot
2.2. Experimental Data Acquisition
2.3. Preprocessing of Thermal Sequence Data
3. Thermalfoot Model
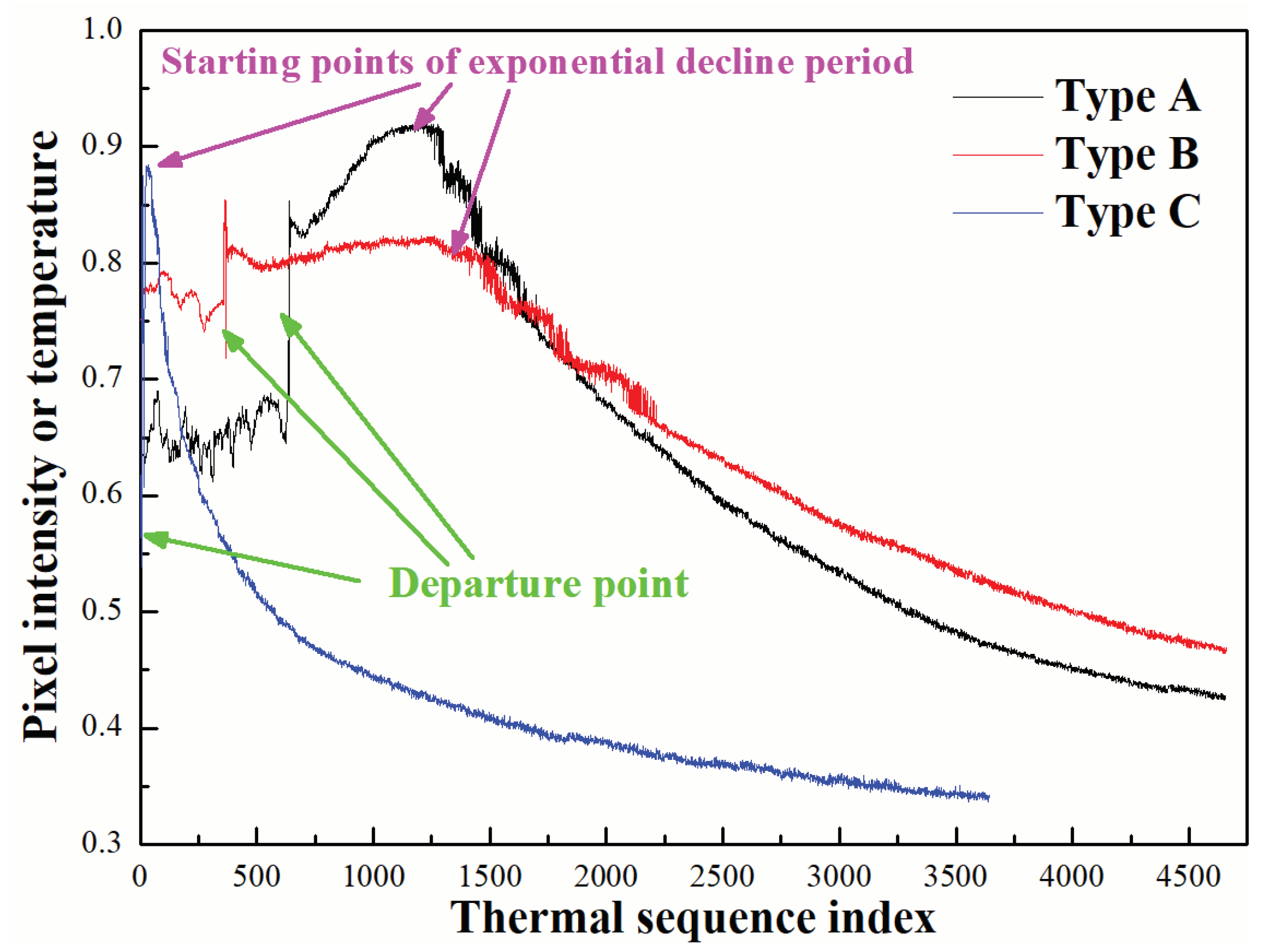
3.1. Determination of Starting Points of Exponential Decline Period
3.2. Determination of Departure Points
3.3. Establishment of Thermal Footprint Model
3.4. Evaluation of Thermal Footprint Model
4. Results
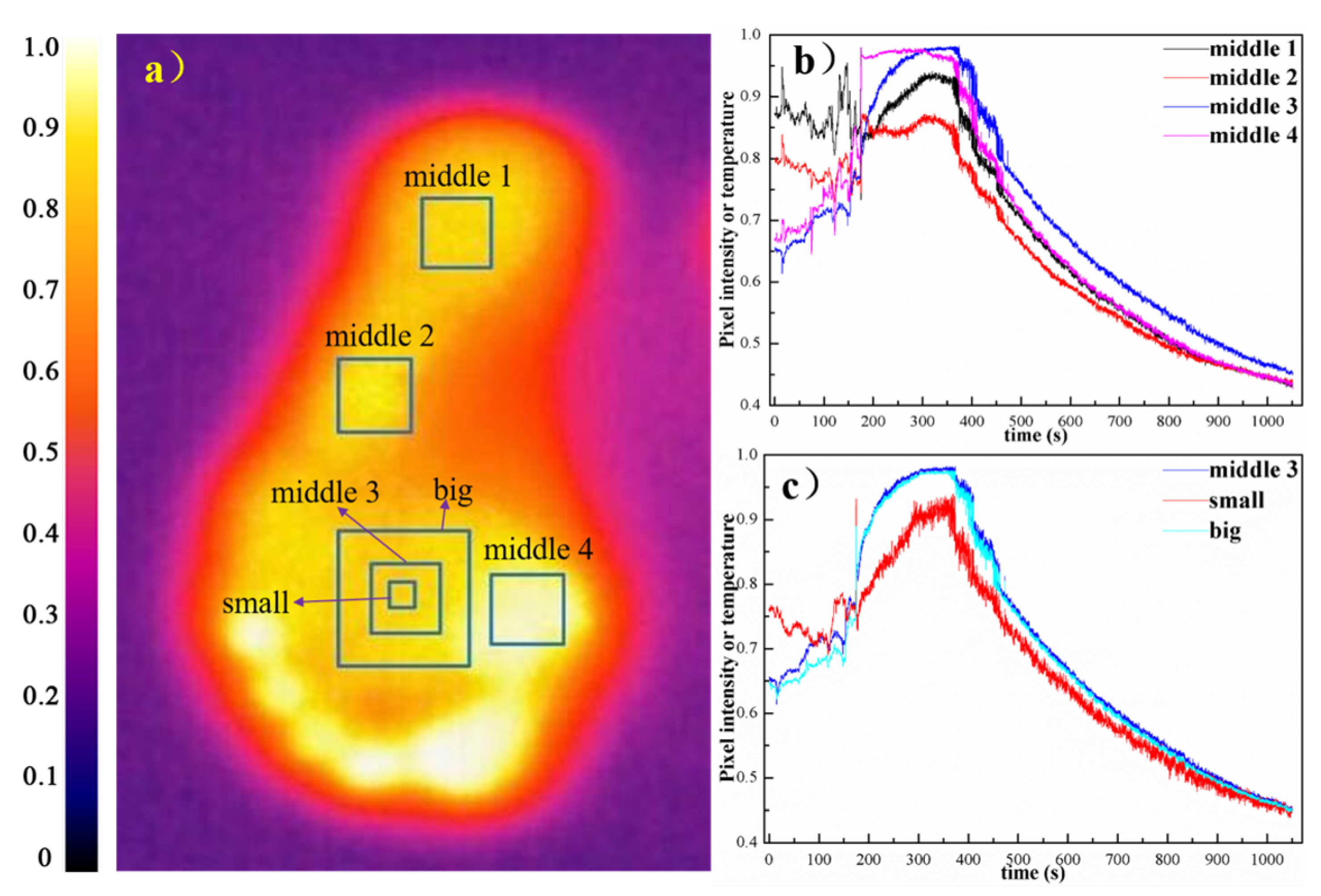
4.1. Qualitative Analysis of Thermal Sequence Curves
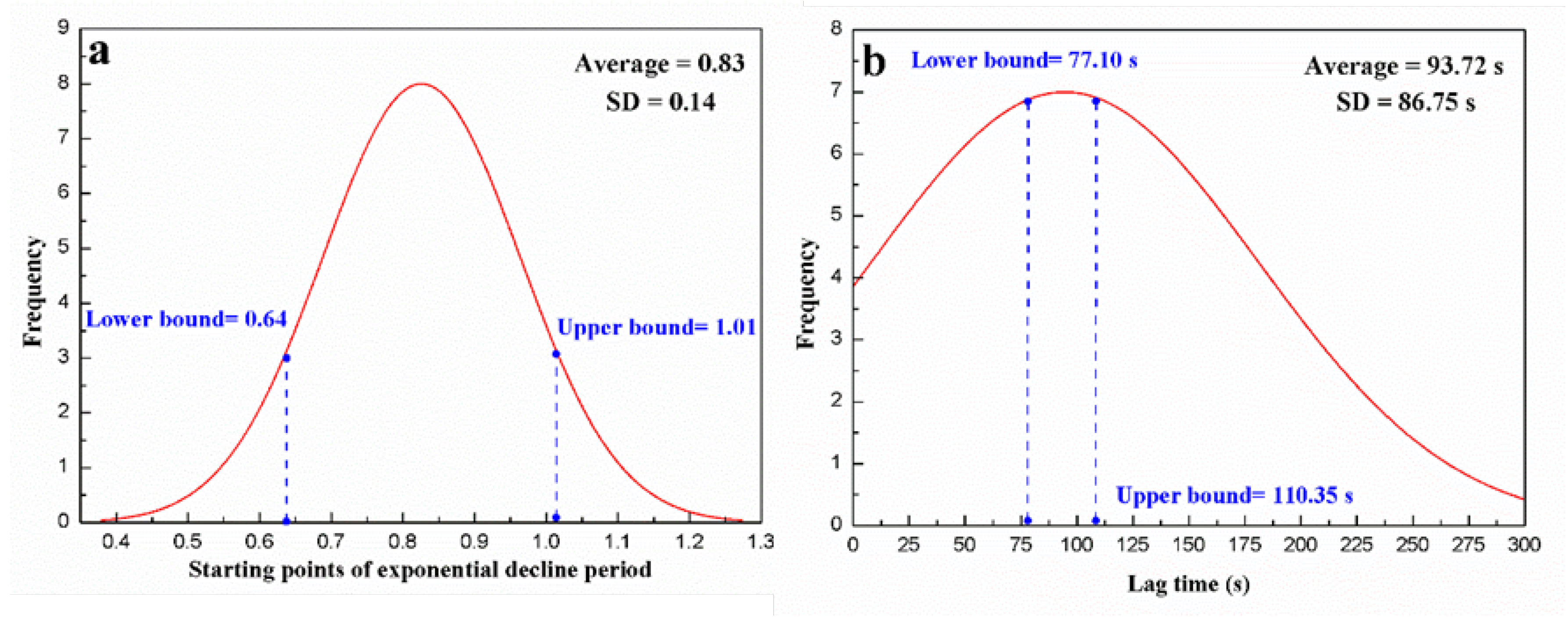
4.2. Statistical Analysis of Lag Time and Starting Point of Exponential Decline Period
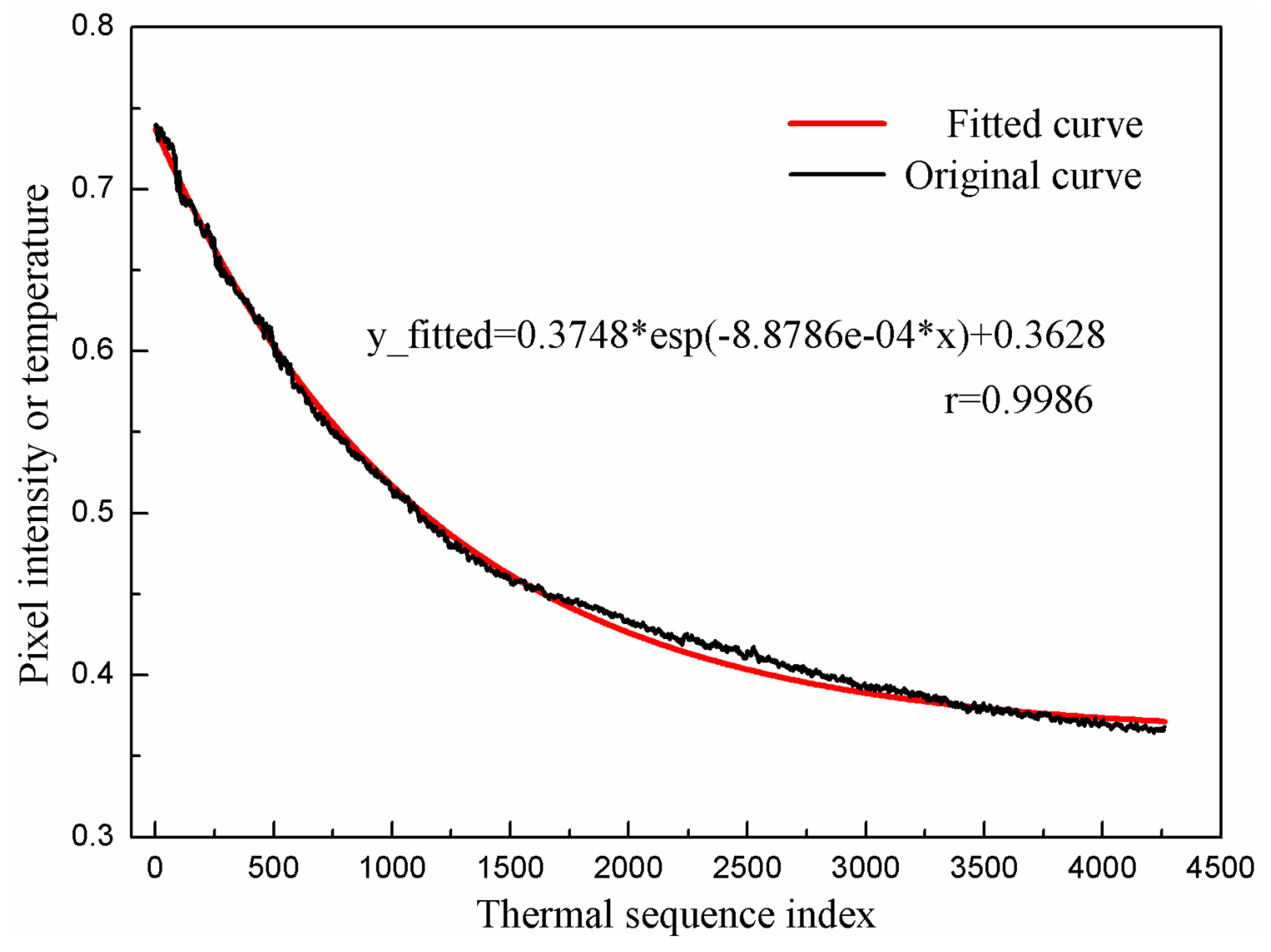
4.3. Analysis of Performance of Model Fitting
4.3.1. Performance of Thermalfoot Model Fitting
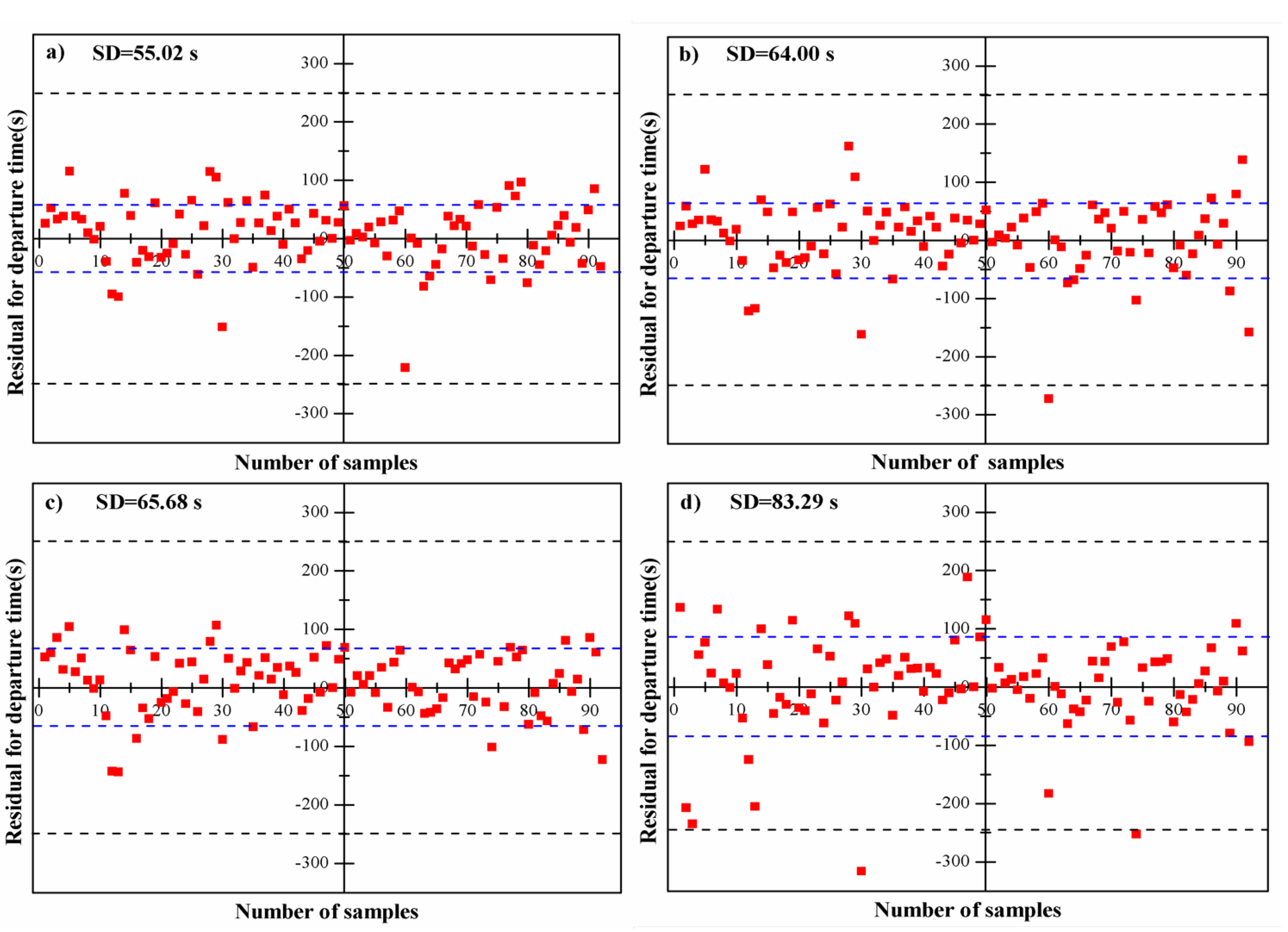
4.3.2. Estimation of Departure Time
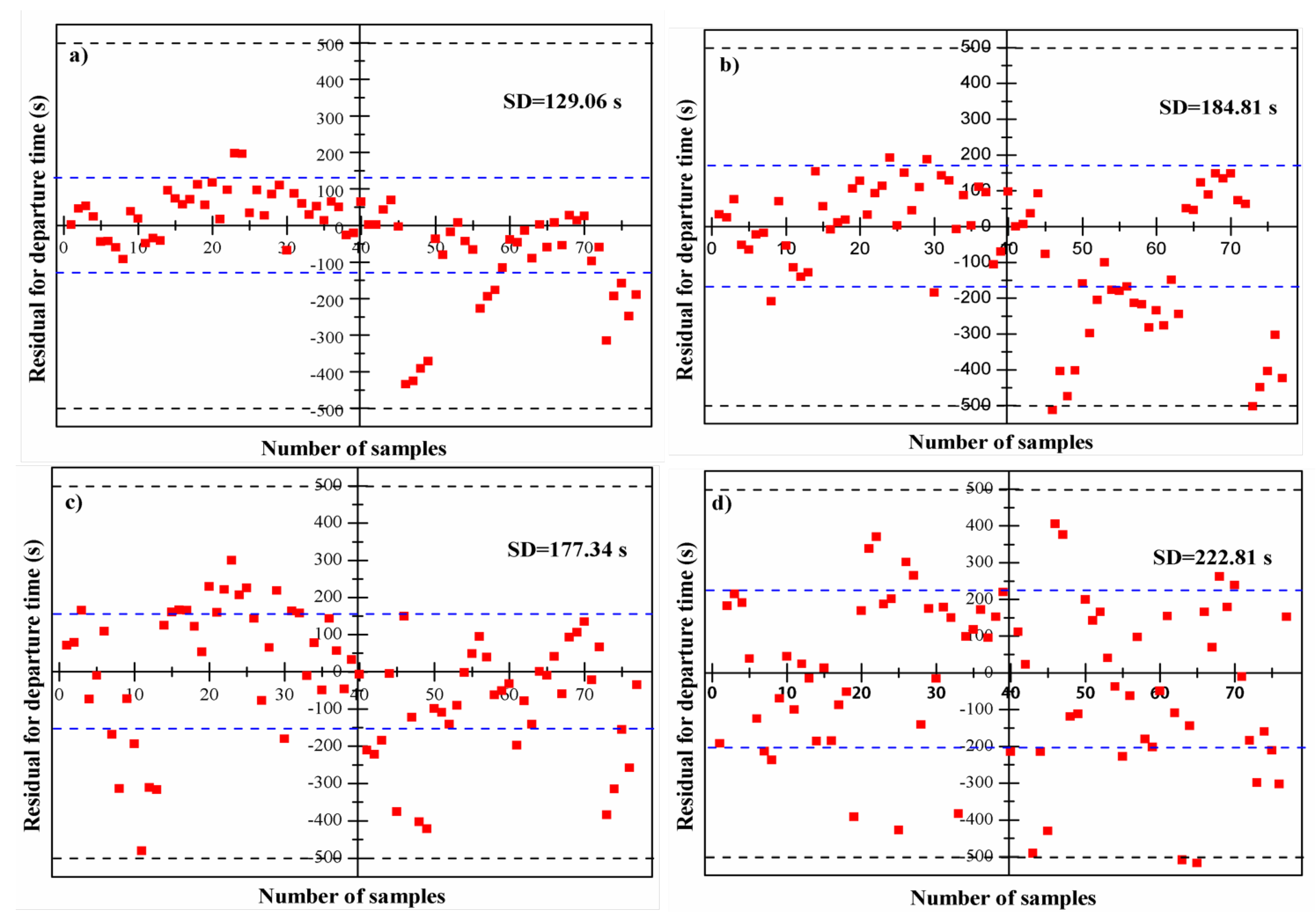
4.3.3. Accuracy of Estimating Departure Time at the Different Capture Time Points
4.4. Comparison with Subjective Calculation Method
5. Discussion
5.1. About "Outlier"
5.2. Discussion of ROI Selection
5.3. Influence of Background Radiation
5.4. Influence of Capture Time Point
5.5. Influence of Standing Time
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lapointe, M.; Rogic, A.; Bourgoin, S.; Jolicoeur, C.; Séguin, D. Leading-edge forensic DNA analyses and the necessity of including crime scene investigators, police officers and technicians in a DNA elimination database. Forensic Sci. Int. Genet. 2015, 19, 50–55. [Google Scholar] [CrossRef]
- Mapes, A.A.; Kloosterman, A.D.; de Poot, C.J. DNA in the criminal justice system: The DNA success story in perspective. J. Forensic Sci. 2015, 60, 851–856. [Google Scholar] [CrossRef] [PubMed]
- Masip, J. Deception detection: State of the art and future prospects. Psicothema 2017, 29, 149–159. [Google Scholar] [PubMed]
- Su, L.; Levine, M. Does “lie to me” lie to you? An evaluation of facial clues to high-stakes deception. Comput. Vision Image Understanding 2016, 147, 52–68. [Google Scholar] [CrossRef] [Green Version]
- Touroo, R.; Fitch, A. Crime Scene Findings and the Identification, Collection, and Preservation of Evidence. In Veterinary Forensic Pathology; Springer: New York, NY, USA, 2018; Volume 1, pp. 9–25. [Google Scholar]
- Touroo, R.; Fitch, A. Identification, collection, and preservation of veterinary forensic evidence: On scene and during the postmortem examination. Veterinary Pathol. 2016, 53, 880–887. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbosa Pereira, C.; Kunczik, J.; Zieglowski, L.; Tolba, R.; Abdelrahman, A.; Zechner, D.; Vollmar, B.; Janssen, H.; Thum, T.; Czaplik, M. Remote Welfare Monitoring of Rodents Using Thermal Imaging. Sensors 2018, 18, 3653. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dong, F.; Tao, C.; Wu, J.; Su, Y.; Wang, Y.; Wang, Y.; Guo, C.; Lyu, P. Detection of cervical lymph node metastasis from oral cavity cancer using a non-radiating, noninvasive digital infrared thermal imaging system. Sci. Rep. 2018, 8, 7219. [Google Scholar] [CrossRef]
- Hu, M.H.; Zhai, G.T.; Li, D.; Fan, Y.Z.; Chen, X.H.; Yang, X.K. Synergetic use of thermal and visible imaging techniques for contactless and unobtrusive breathing measurement. J. Biomed. Opt. 2017, 22, 036006. [Google Scholar] [CrossRef]
- Hu, M.; Zhai, G.; Li, D.; Fan, Y.; Duan, H.; Zhu, W.; Yang, X. Combination of near-infrared and thermal imaging techniques for the remote and simultaneous measurements of breathing and heart rates under sleep situation. PLoS ONE 2018, 13, e0190466. [Google Scholar] [CrossRef] [Green Version]
- Pereira, C.B.; Yu, X.; Goos, T.; Reiss, I.; Orlikowsky, T.; Heimann, K.; Venema, B.; Blazek, V.; Leonhardt, S.; Teichmann, D. Noncontact monitoring of respiratory rate in newborn infants using thermal imaging. IEEE Trans. Biomed. Eng. 2018, 66, 1105–1114. [Google Scholar] [CrossRef]
- Stein, G.S.; Shashua, A.; Gdalyahu, Y.; Liyatan, H. Fusion of far infrared and visible images in enhanced obstacle detection in automotive applications. U.S. Patent 7,786,898, 31 August 2010. [Google Scholar]
- Benli, E.; Spidalieri, R.; Motai, Y. Thermal Multisensor Fusion for Collaborative Robotics. IEEE Trans. Ind. Inf. 2019, 15, 3784–3795. [Google Scholar] [CrossRef]
- Cai, Y.; Liu, Z.; Wang, H.; Sun, X. Saliency-based pedestrian detection in far infrared images. IEEE Access 2017, 5, 5013–5019. [Google Scholar] [CrossRef]
- Budzan, S.; Wyżgolik, R.; Ilewicz, W. Improved Human Detection with a Fusion of Laser Scanner and Vision/Infrared Information for Mobile Applications. Appl. Sci. 2018, 8, 1967. [Google Scholar] [CrossRef] [Green Version]
- Janssens, O.; Schulz, R.; Slavkovikj, V.; Stockman, K.; Loccufier, M.; Van de Walle, R.; Van Hoecke, S. Thermal image based fault diagnosis for rotating machinery. Infrared Phys. Technol. 2015, 73, 78–87. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of the three-phase induction motor using thermal imaging. Infrared Phys. Technol. 2017, 81, 7–16. [Google Scholar] [CrossRef]
- Szajewska, A. Development of the Thermal Imaging Camera (TIC) Technology. Procedia Eng. 2017, 172, 1067–1072. [Google Scholar] [CrossRef]
- Zhao, Y.; Ma, J.; Li, X.; Zhang, J. Saliency detection and deep learning-based wildfire identification in UAV imagery. Sensors 2018, 18, 712. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Zhang, H.; Liu, T. Study on body temperature detection of pig based on infrared technology: A review. Artif. Intell. Agric. 2019, 1, 14–26. [Google Scholar] [CrossRef]
- Pavlidis, I.; Eberhardt, N.L.; Levine, J.A. Human behaviour: Seeing through the face of deception. Nature 2002, 415, 35. [Google Scholar] [CrossRef]
- Warmelink, L.; Vrij, A.; Mann, S.; Leal, S.; Forrester, D.; Fisher, R.P. Thermal imaging as a lie detection tool at airports. Law hum. Behav. 2011, 35, 40–48. [Google Scholar] [CrossRef]
- Montoya, M. Detection of physiological state using thermal image analysis. U.S. Patent 15,830,433, 7 June 2018. [Google Scholar]
- Zalewski, M. Cracking Safes with Thermal Imaging. Available online: http://lcamtuf.coredump. cx/tsafe (accessed on 30 January 2020).
- Mowery, K.; Meiklejohn, S.; Savage, S. Heat of the moment: Characterizing the efficacy of thermal camera-based attacks. In Proceedings of the 5th USENIX conference on Offensive technologies, San Francisco, CA, USA, 8–11 August 2011; p. 6. [Google Scholar]
- Li, D.; Zhang, X.P.; Hu, M.; Zhai, G.; Yang, X. Physical Password Breaking via Thermal Sequence Analysis. IEEE Trans. Inf. Forensics Secur. 2018, 14, 1142–1154. [Google Scholar] [CrossRef]
- Abdelrahman, Y.; Khamis, M.; Schneegass, S.; Alt, F. Stay cool! Understanding thermal attacks on mobile-based user authentication. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 3751–3763. [Google Scholar]
- Kang, S.; Choi, H.; Park, S.; Park, C.; Lee, J.; Lee, U.; Lee, S.J. Fire in Your Hands: Understanding Thermal Behavior of Smartphones. In Proceedings of the 25th Annual International Conference on Mobile Computing and Networking, Los Cabos, Mexico, 21–25 October 2019. [Google Scholar]
- Liping, G. Police Smash Nearly 6,900 Mafia-Style Groups in Major Campaign. Available online: http://www.ecns.cn/news/2019-01-28/detail-ifzcykxs9530149.shtml (accessed on 30 January 2020).
- Hu, M.; Zhai, G.; Li, D.; Li, H.; Liu, M.; Tang, W.; Chen, Y. Influence of image resolution on the performance of remote breathing rate measurement using thermal imaging technique. Infrared Phys. Technol. 2018, 93, 63–69. [Google Scholar] [CrossRef]
- Yoshikawa, H.; Uchiyama, A.; Higashino, T. ThermalWrist: Smartphone Thermal Camera Correction Using a Wristband Sensor. Sensors 2019, 19, 3826. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Portenier, C.; Ott, B.; Wellig, P.; Wunderle, S. Cloud detection and visibility estimation during night time using thermal camera images. In Proceedings of the SPIE SECURITY + DEFENCE, Strasbourg, France, 9–12 September 2019; Volume 11158, p. 1115805. [Google Scholar]
- Bennett, S.L.; Goubran, R.; Knoefel, F. Examining the Effect of Noise on Biosignal Estimates Extracted through Spatio-Temporal Video Processing. In Proceedings of the 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 4504–4508. [Google Scholar]
- Šroba, L.; Grman, J.; Ravas, R. Impact of Gaussian noise and image filtering to detected corner points positions stability. In Proceedings of the 11th International Conference on Measurement, Smolenice, Slovakia, 29–31 May 2017; pp. 123–126. [Google Scholar]
- Delpueyo, D.; Balandraud, X.; Grédiac, M. Heat source reconstruction from noisy temperature fields using an optimised derivative Gaussian filter. Infrared Phys. Technol. 2013, 60, 312–322. [Google Scholar] [CrossRef]
- Bagavathiappan, S.; Philip, J.; Jayakumar, T.; Raj, B.; Rao, P.N.S.; Varalakshmi, M.; Mohan, V. Correlation between plantar foot temperature and diabetic neuropathy: A case study by using an infrared thermal imaging technique. J. Diabetes Sci. Technol. 2010, 4, 1386–1392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ersen, A.; Adams, L.S.; Myers, R.T.; Hirschman, G.B.; Lavery, L.A.; Yavuz, M. Temperature Regulating Shoes for Prevention of Diabetic Foot Ulcers. Diabetes 2018, 67. [Google Scholar] [CrossRef]
- Patankar, S. Numerical Heat Transfer and Fluid Flow; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm or Method | One-Third | One-Half | Two-Thirds | Three-Fourths | Four-Fifths | Five-Sixths |
|---|---|---|---|---|---|---|
| Thermalfoot model | 71.96% | 50.47% | 42.06% | 31.78% | 21.70% | 11.21% |
| Subjective calculation | 58.89% | 37.38% | 34.58% | 23.36% | 23.36% | 11.21% |
| Subjective calculation | 62.62% | 40.19% | 36.45% | 32.71% | 28.04% | 12.15% |
| Situation | 16 °C | 28 °C |
|---|---|---|
| Known starting point | 14.29% | 13.85% |
| Predicted starting point | 26.29% | 29.23% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Wang, Q.; Li, D.; Hu, M.; Yao, N.; Zhai, G. Estimating Departure Time Using Thermal Camera and Heat Traces Tracking Technique. Sensors 2020, 20, 782. https://doi.org/10.3390/s20030782
Xu Z, Wang Q, Li D, Hu M, Yao N, Zhai G. Estimating Departure Time Using Thermal Camera and Heat Traces Tracking Technique. Sensors. 2020; 20(3):782. https://doi.org/10.3390/s20030782
Chicago/Turabian StyleXu, Ziyi, Quchao Wang, Duo Li, Menghan Hu, Nan Yao, and Guangtao Zhai. 2020. "Estimating Departure Time Using Thermal Camera and Heat Traces Tracking Technique" Sensors 20, no. 3: 782. https://doi.org/10.3390/s20030782
APA StyleXu, Z., Wang, Q., Li, D., Hu, M., Yao, N., & Zhai, G. (2020). Estimating Departure Time Using Thermal Camera and Heat Traces Tracking Technique. Sensors, 20(3), 782. https://doi.org/10.3390/s20030782