1. Introduction
Air pollution has been identified as the greatest environmental cause of morbidity and mortality in the world at present, and particulate matter (PM) is shown to have the greatest health impact of all measured pollutants [
1,
2]. This disease burden is chiefly attributed to diseases such as: asthma, chronic obstructive pulmonary disease (COPD), lung cancer, ischaemic heart disease, and stroke, but air pollution has more recently been associated with a host of other diseases and impacts, such as loss of cognitive performance, diabetes, Alzheimer’s and Parkinson’s disease [
3,
4,
5,
6,
7]. In a recent study, Wu et al. [
8] showed that small increase in PM
2.5 long-term exposure is linked with large increased mortality from COVID-19.
The emission of PM also has wide-reaching climatic effects across the globe through particles acting as cloud-condensation nuclei, altering weather patterns and potentially contributing to droughts, or by lowering the Earth’s albedo, particularly as black carbon in snow, and inducing climate change [
9,
10].
Due to its range of impacts, accurate measurement of PM concentration in the environment is of great interest, as it is essential to enforcing adherence to legal regulations, determining the exact extent of PM pollution, understanding the exposure of individuals, and monitoring the efficacy of remediation efforts.
Current monitoring networks for regulatory purposes rely on a small number of sparsely placed, expensive monitoring stations. For instance, only 24 countries have more than three monitoring station per million inhabitants [
11]. These stations provide accurate measurements, generally on an hourly basis, for their exact location but as hourly mean levels of pollutants vary considerably over tens of metres, this level of coverage cannot provide accurate exposure data for citizens [
12,
13,
14,
15]. The rapid variation in urban pollution levels is due to the strong influence of local sources and meteorological conditions, as well as street canyon effects in these areas [
16]. The traditional monitoring strategy does not account for indoor exposure which can be greatly elevated relative to outdoor, for instance through use of solid-fuels for heating and cooking, emissions from the cooking itself, and household aerosols. Around half of all pollution related deaths are attributed to indoor pollution exposure although this cannot be accurately studied by outdoor monitoring stations [
1,
17]. Air pollution has a disproportionately large impact on low and middle income countries [
1], where reference-grade air quality monitoring is typically absent, further highlighting the need for alternative ways to accurately quantify air pollution.
Low-cost PM sensors, generally based on light-scattering measurement techniques, have several benefits. They are easy to use compared to monitoring stations as they are significantly smaller and use much less power, and they are amenable to temporary and mobile installation. Their low cost has the overriding benefit that they can be deployed in great numbers which, added to their high frequency of measurement (≈1
), increases the spatio-temporal granularity of available measurements. As such they can augment and improve the current system for monitoring urban air pollution [
18,
19]. Once they are validated there are myriad other uses for low-cost and portable PM sensors. In particular, a better understanding of the spatio-temporal variation of PM concentration would improve the accuracy of exposure classification in epidemiological studies, while a better understanding of personal exposure at the individual level may be required to be able to accurately identify biomarkers of PM exposure and effect [
20]. Other examples of their diverse potentials include source tracking and early warning systems for forest fires that would combine CO, CO
2 and PM monitors and drone-mounted sensors for monitoring shipping emissions [
21,
22]. They also have the potential to help in directing remediation efforts and to enable citizens to make informed decisions about how to manage their personal exposure, which could significantly lower their risk of disease even if pollution levels do not fall [
23]. Low-cost PM sensors could also help improve the understanding of indoor air pollution, in particular where high levels of outdoor air pollution preclude ventilation with outdoor air [
24,
25]. At present there is insufficient data to validate their use for regulatory purposes [
26,
27,
28], which is particularly urgent in developing countries.
Despite the multiple benefits of their low cost, low maintenance requirements, small size, small power requirements and portability, current low-cost sensors have important shortcomings which limit their potential, and must be addressed before their wide-scale accreditation and use. These include [
29]: (1) a lower limit of detection which may be of the same order of magnitude than measured ambient PM concentrations, especially in developed nations; (2) variable responses to changes in humidity and temperature; (3) inability to measure PM mass directly; (4) lack of sensitivity to particles <
in diameter; (5) differential response to particles depending on their composition; and (6) inter-unit variability even for units of the same model/manufacturer. While these issues are known there is not currently enough evidence to correct them, either from field or laboratory based studies. More information on the accuracy, precision, and reproducibility of the data, and how these confounding factors may differentially affect these, is necessary for improving the way in which the output of such sensors is used and interpreted. Morawska et al. [
28] reviewed the use of low-cost sensors and concluded that low-cost sensors have “already changed the paradigm of air pollution monitoring” and are already suitable for supplementing ambient monitoring networks by providing data of lesser quality than the reference monitoring networks but higher spatio-temporal resolution [
30]. The review also concludes that the sensors are suitable for engaging citizens, but are not yet of sufficient quality for source compliance or personal exposure monitoring.
The issues above mentioned are attributed to the sensing mechanism, which relies on Mie scattering [
31], and due to this, the method works best for particle diameters larger than the wavelength of the incident light, typically a few hundred nanometers. This excludes ultrafine particles from the measurement, which may be key in driving adverse health effects, while only representing a small proportion of the mass of PM. Particles with a diameter greater than ca. 10
, because of their weight and size are harder to draw into the sensing area. Humidity and temperature fluctuations are known to alter the recorded particle mass as they can change the amount of water adsorbed by particles and therefore their recorded size but also modifies the refractive index of the particles. Low-cost PM sensors tend to over report above a given Relative Humidity (RH) (generally, around 80%) and if the particular conditions for condensation of water are reached this can further impact measurement [
32,
33]. Jayaratne et al. [
32] notes that this behaviour may also affect reference instruments such as Tapered Element Oscillating Microbalances (TEOMs) to a certain extent. In Nyarku et al. [
34] a mobile phone equipped with PM and Volatile Organic Compounds (VOC) sensors was tested against reference instruments with a range of pollutants, the PM sensor was found to have a linear response at elevated PM concentrations but not at the lower concentrations pertinent to ambient monitoring. The lower accuracy of the sensors at lower concentration has been observed by other studies [
35,
36]. Particle density and refractive index are assumed in the conversion of sensor signal to a mass of PM so the calibration of a sensor will only be accurate for PM of a specific density, as determined by composition and therefore the sensors must be re-calibrated for different environments [
27]. In Sousan et al. [
37] it was shown that this can be accounted for with a source-specific calibration when sensors are used for occupational exposure.
A number of recent studies of low-cost sensors for both static and mobile applications have employed manufacturer-supplied performance data without performing an independent calibration [
28,
38]. However, there is evidence that the deployment conditions will impact sensor response and that sensors exhibit inter-model variability [
33,
35]. Sayahi et al. [
38] developed a calibration chamber for low-cost PM sensors that could identify malfunctioning sensors and expose inter-model inconsistencies as well as differing response to different aerosol types between sensors. This inter-model variability was also shown for real indoor pollution events across eight sensors in Zou et al. [
39]. Similar results were found for low-cost sensors in the outdoor environment in Badura et al. [
40], where a strong linear relationship to TEOM measurements was recorded for most of the sensors tested. Individual field calibration of the sensors may be required and a greater understanding of the effect of prevailing conditions on sensor response must be developed to address this issue. Laboratory and field conditions testing are complementary and are both required to fully assess the performances of the sensors [
28]. Outdoor studies and calibration under realistic conditions need to be of sufficient duration to capture a range of environmental conditions and aerosol compositions. These studies are time consuming, can only capture local environmental conditions, and are less explanatory than controlled experiments. Laboratory characterisation enables fast evaluation of specific behaviour of the sensors [
38,
41,
42].
The great majority of the recent studies investigating the performance of low-cost PM sensors in a laboratory environment, average concentrations over extended periods of time, for example 1 h, are measured, or pollution events which concentration then decreases slowly over several minutes or hours [
41]. Other laboratory studies often tested a small number of sensors or sensors from a same manufacturer [
32,
34,
37,
43,
44,
45,
46], and often employed high concentrations of PM, above 100
/
that are left to decrease through gravity or particle loss [
34,
36,
44,
46,
47,
48].
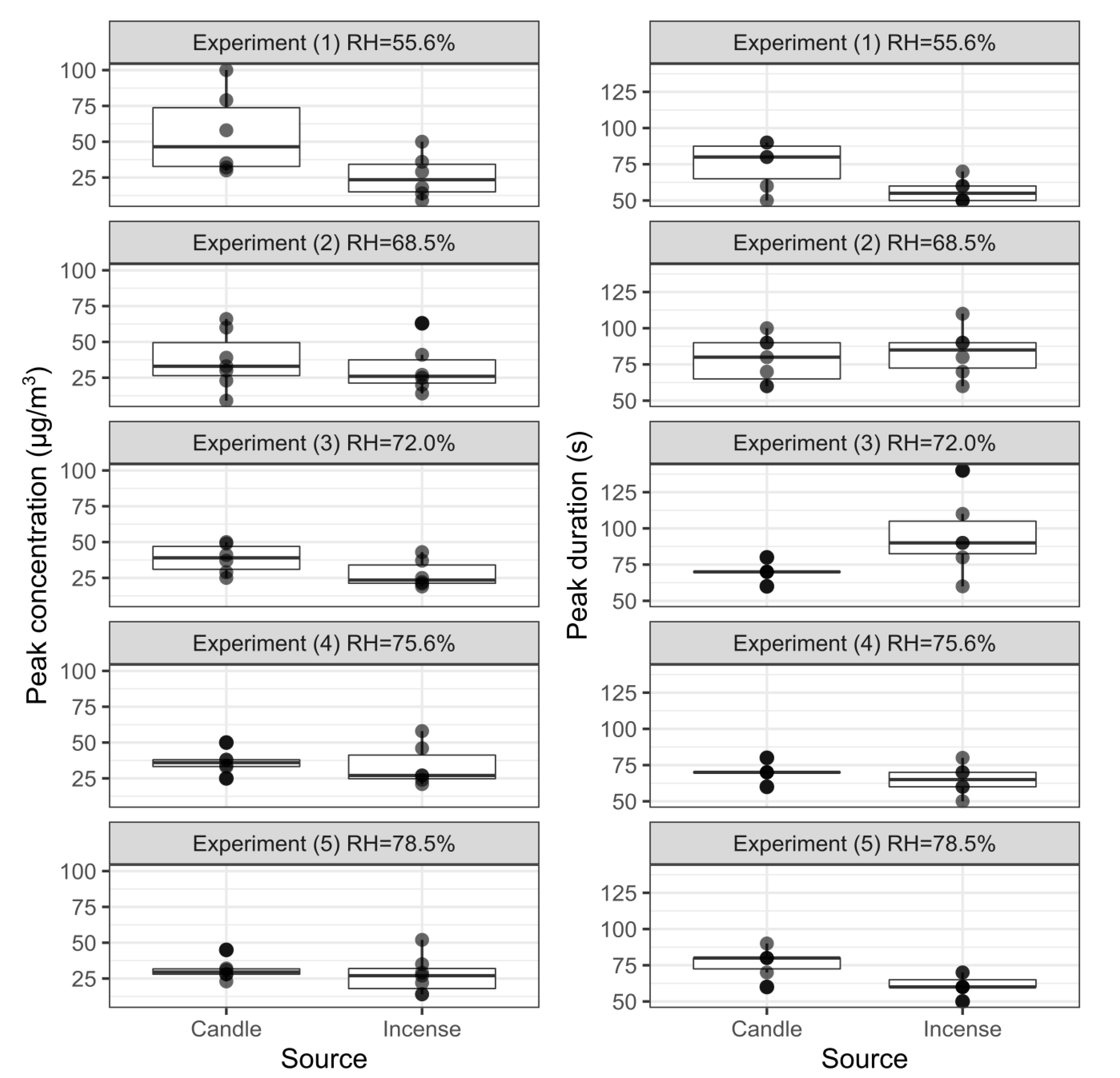
In this study, a large number of sensors from different manufacturers were evaluated concurrently. The sensors’ response, at a 10
sampling period, to spikes of pollution lasting ≈1 min was monitored, with a PM
2.5 median peak concentrations <40
/
, from two different sources of pollution. Such peaks are similar to measurements undertaken under outdoor conditions by these sensors [
35,
40] and may inform regarding the potential and limitations of these sensors for outdoor deployments. This is especially pertinent for their use as personal exposure monitors or for mobile applications and especially to assess their capacity to track sources of pollution. This study aims: (1) to cross compare the performance of a range of commercially available low-cost PM sensors; (2) to better understand the response of these sensors to short events of pollution; (3) to characterise the influence of environmental factors; (4) to characterise inter-unit variability; (5) to demonstrate that low-cost PM sensors can be used, despite their limitations and with proper considerations, to track sources of pollution.
4. Discussion
In this study, the lower limit of detection of the sensors has been determined using three different methods, the first based on the standard deviation of the sensors under blank conditions, the second on the evolution of the ratio between the mean and the standard deviation with increasing concentrations of PM and the third based on the standard deviation of the sensors at low concentrations after calibration. A series of five experiments were conducted for two candle and incense generated PM at five different levels of RH. The time-series of the experiments were presented and analysed. Then for some model of sensors, the time-series were adjusted to compensate the delay observed. The influence of humidity on the slope and the Pearson coefficient of the linear model between the sensors and the DustTrak was analysed. Finally, the performance of the calibration of the sensors through the linear model on the values of the peaks reported by the sensors was assessed. While providing useful insight on the performances of the sensors, this study has some limitations that must be taken into account for extrapolating its results. It only tested the sensors against two sources of pollution that are related to combustion. Environmental particles, in particular from non combustion sources, will have different physical and chemical properties including their hygroscopicity, refractive index and particle size. The range of temperature used did not reflect the range of temperatures experienced in outdoor condition and the range of RH was limited. Finally, the reference instruments used to measure PM did not measure PM mass directly.
The first two methods employed for determining the LLOD of the sensors produced similar results and are similar to the limit of detection measured by Northcross et al. [
74] and Austin et al. [
46] on different models of light-scattering PM sensors during laboratory studies. The LLODs reported by outdoor studies are generally higher than the ones reported here: Sayahi et al. [
50] applied the third method and found a LLOD of 6
/
for the Plantower PMS1003 and PMS5003; Zikova et al. [
82] applied the second method and obtained a LLOD of 10
/
for Speck monitors. The objective of determining the LLOD for low-cost PM sensors is to be able to determine the value above which they can reliably measure PM. The results of this study suggest that the LLOD determined through laboratory study may not be sufficient to evaluate the accuracy and precision of these sensors at low concentrations of PM. The LLOD is difficult to evaluate outdoor because most of the reference instruments available only report hourly data making the comparison to the high frequency data produced by the sensors impossible and most studies only determine at best the LLOD for hourly data. This shows the need to have reliable instruments that measure and report data at higher frequency than what is currently available.
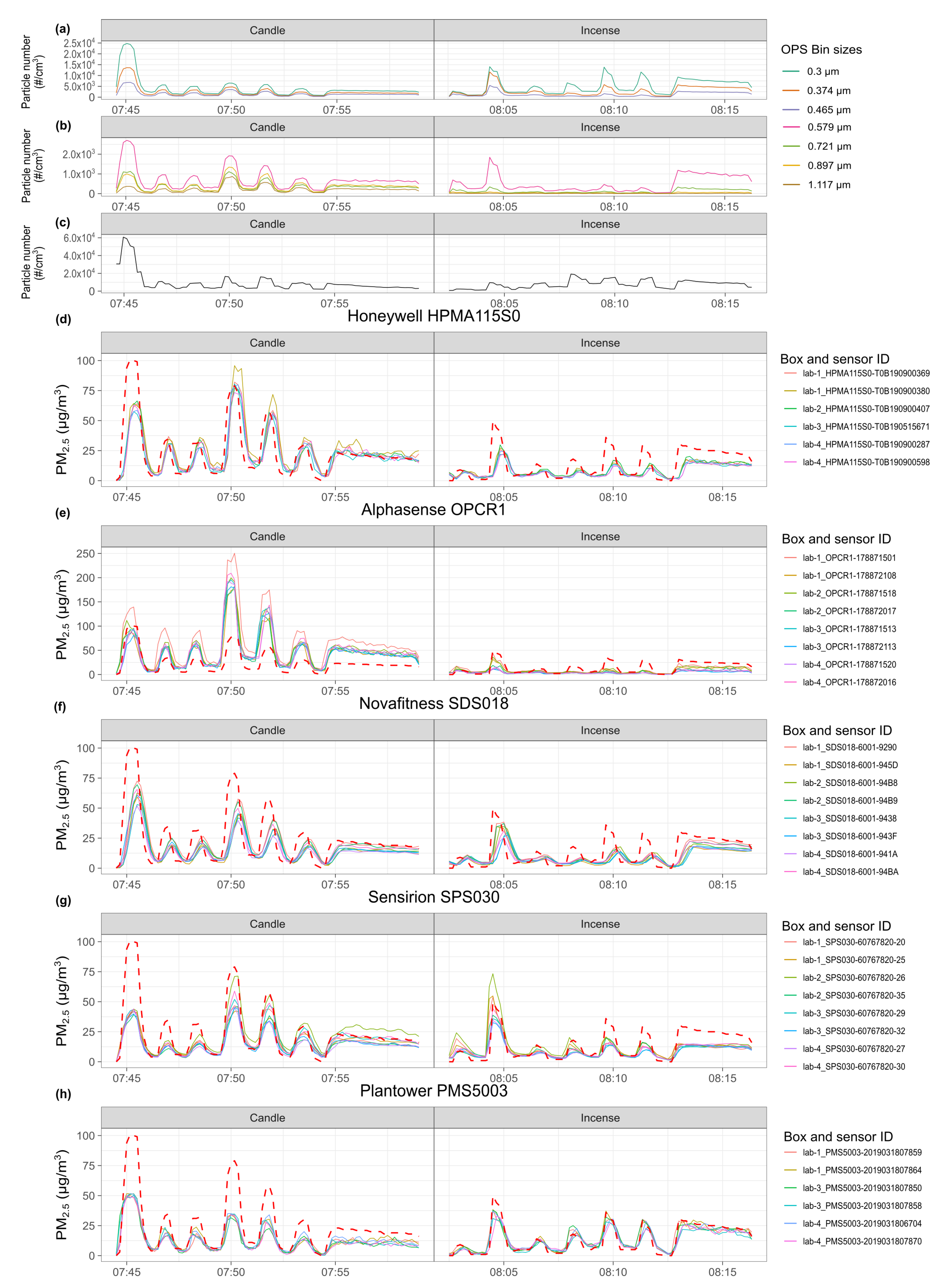
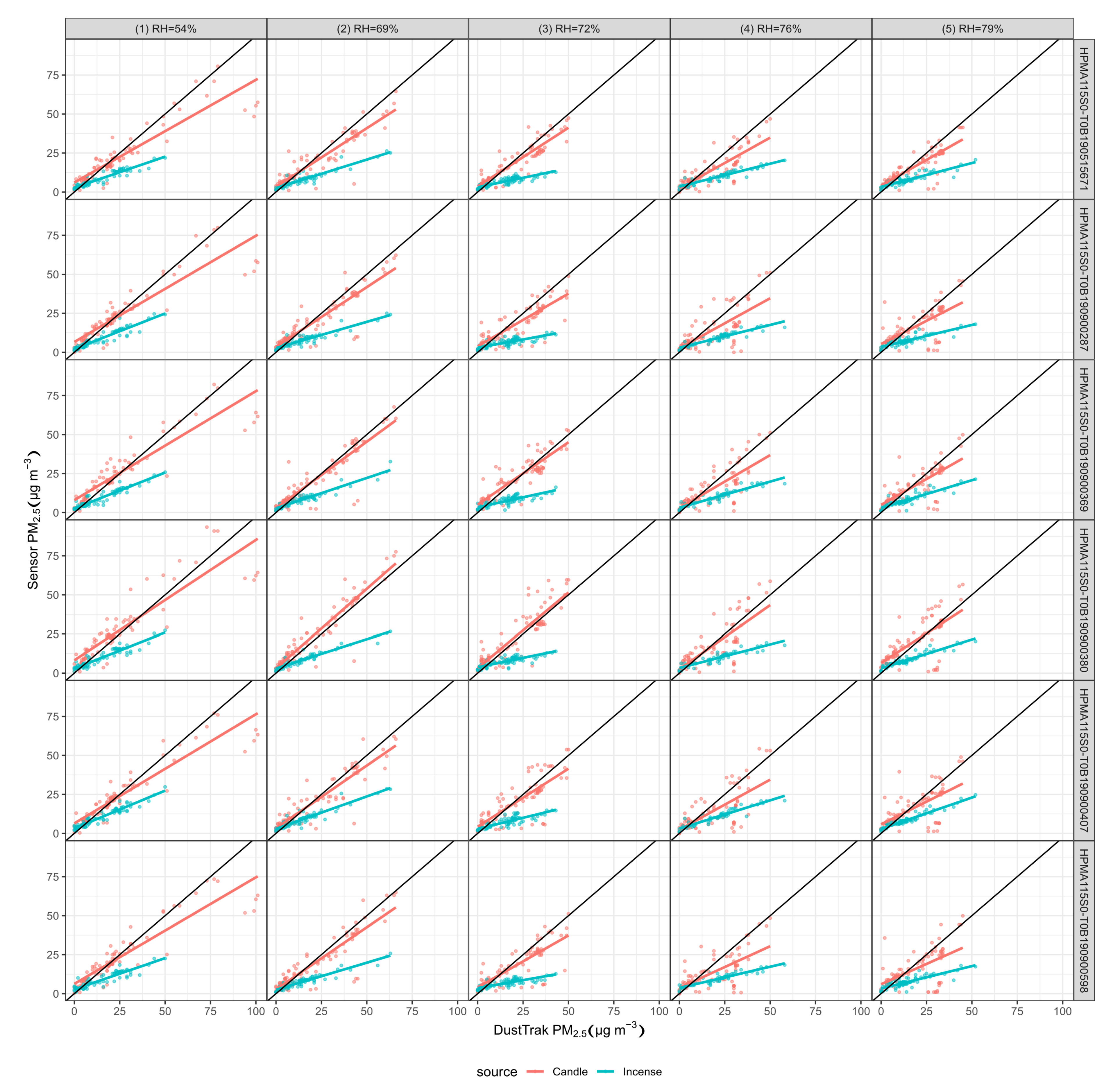
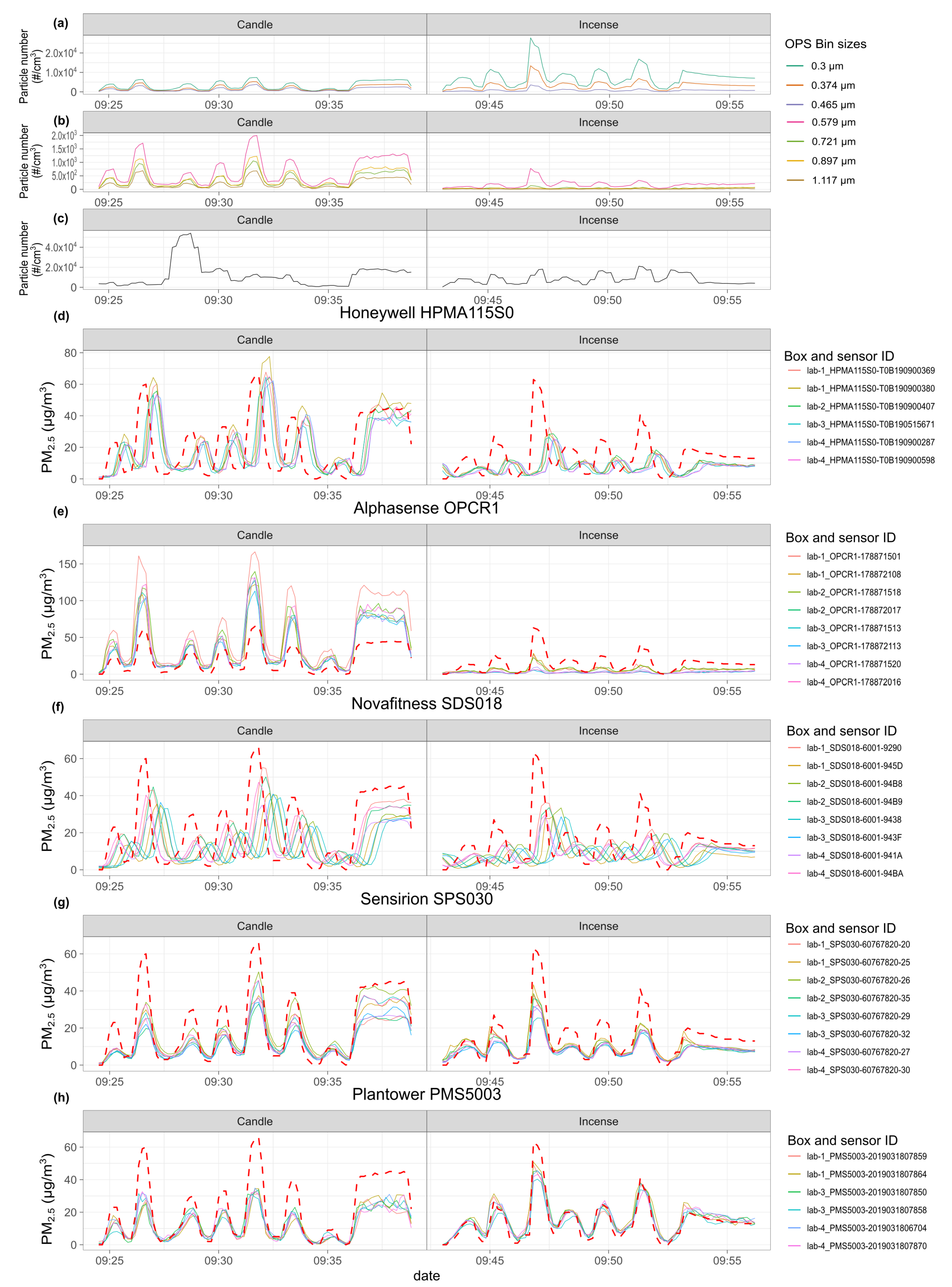
To the best of our knowledge, this study is the first to assess the delay in the response of low-cost sensors relative to peaks of pollution. A delay was observed on two out of the five models tested. Depending on the models of sensor, the delay varied between a few seconds to ≈2 . The Honeywell HPMA115S0 and the Novafitness SDS018 are the only models examined here that only report PM mass concentration and no particle count which may suggest they use a different method for inferring the number of particles from the electrical signal generated by their photodetector. The Honeywell HPMA115S0 applies a 10 moving average to its raw readings. However, these elements alone cannot fully account for the delay observed. The Novafitness SDS018 also present a high inter-unit variability for the delay. The existence of this delay implies that these sensors are nopt suitable to be used when a time averaging period <2 is required. The delay correction method proposed here requires a post-treatment of the data with a reference instrument and is not suitable for real-time correction but can still address the issue of time alignment when multiple instruments are used during an experiment. It should only be considered if the delay corrected sensors present better performances than other sensors. For applications that require a high time granularity, it is recommended to avoid sensors presenting that exhibit a delay in response to transient events.
The different response of low-cost PM sensors to sources of pollution is a known and well studied issue [
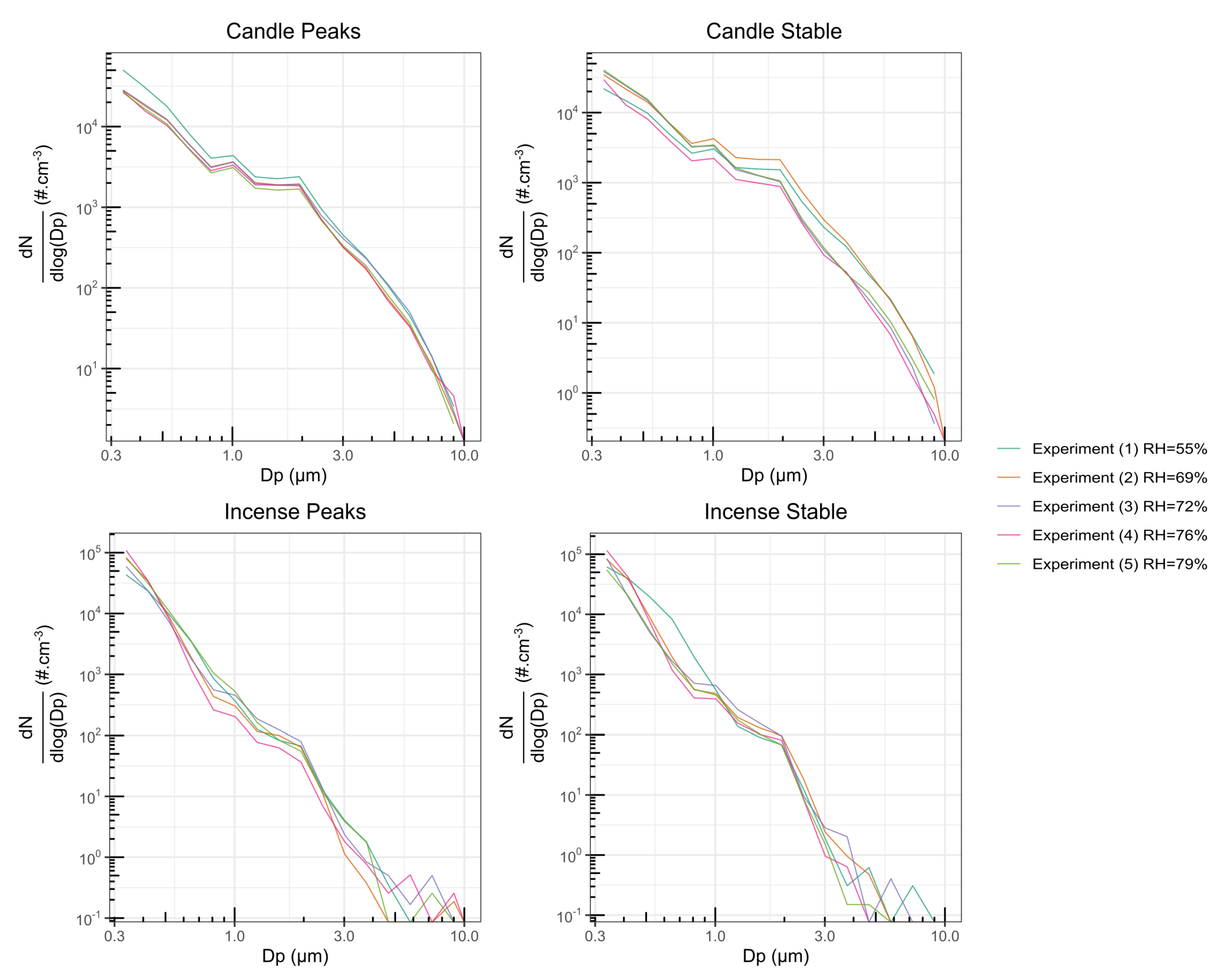
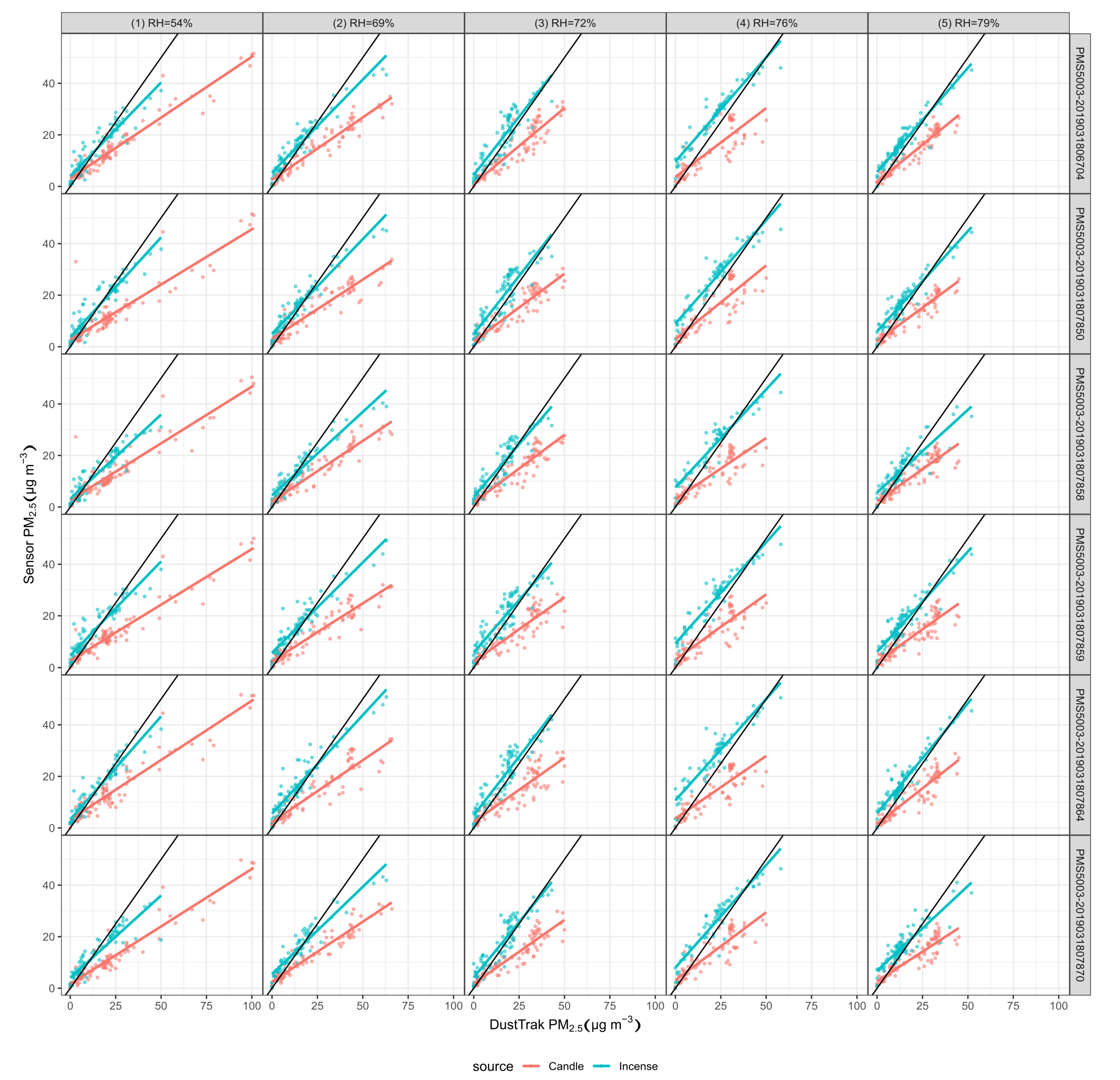
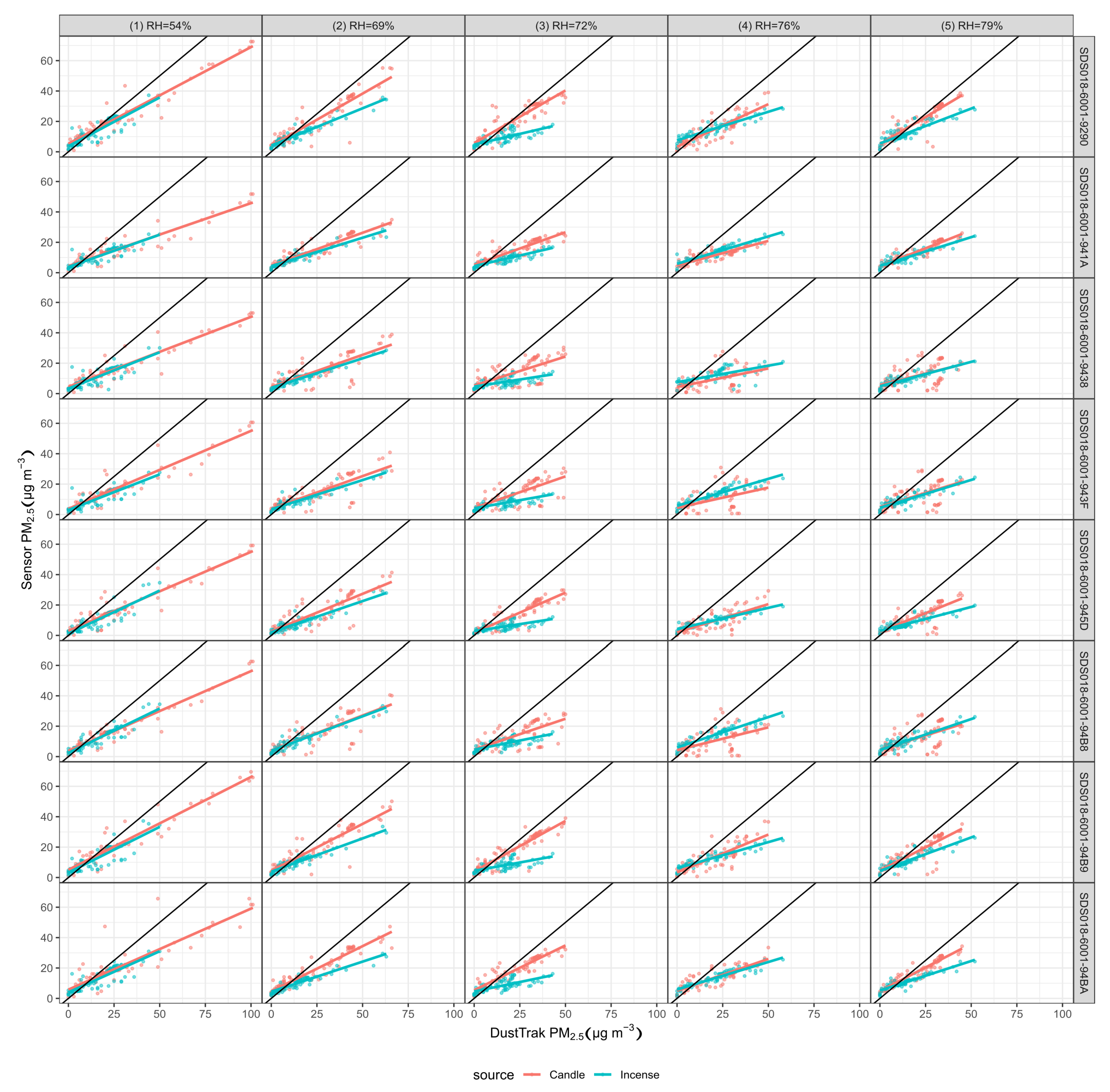
28] and the goal of this study was not to characterise this response. The two different sources were used to acknowledge this effect but also to have an indication on the dependence of the performances of the sensors on the size distribution of the PM. The different performances of the sensors with candle and incense smoke may be partly attributed to the size distribution of the two smokes with the candle smoke containing larger particles than the incense smoke. The Plantower PMS5003 and the Novafitness SDS018 are the only two models of sensors that presented similar
R for candle and incense particles while the three other models of sensors presented lower
R for incense. The Plantower PMS5003 is the only model of sensor that showed a greater slope for incense than for candle suggesting that these sensors are best suited for measuring the smallest particles rather than bigger size fractions. This is further supported by the lower coefficients of variation obtained by this model of sensor for incense than for candle. Conversely, the similar
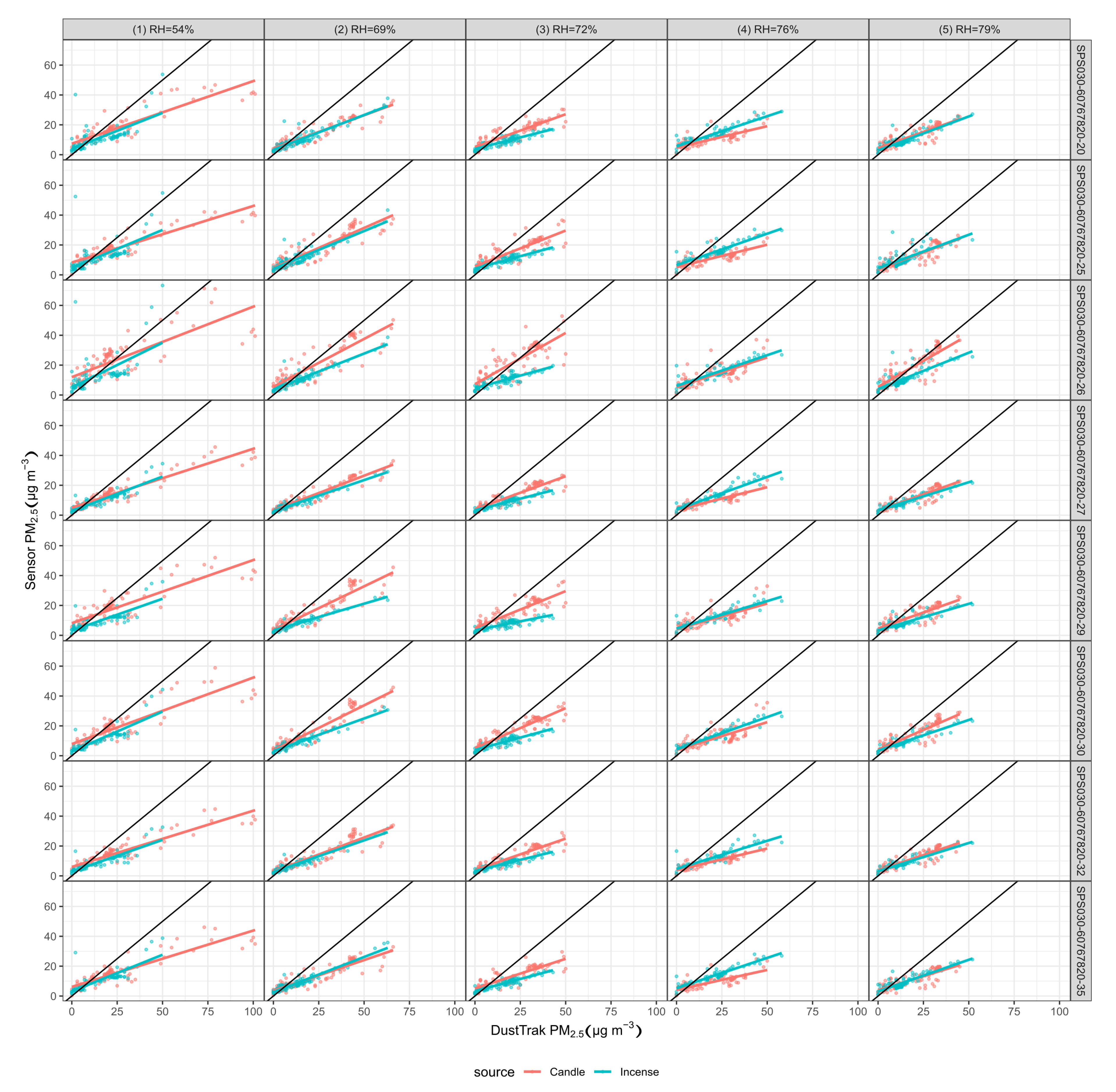
R showed by this model of sensor for the two sources of pollution may suggests that this result from its factory calibration rather than from its actual capacity at differentiating size distribution of PM. The Sensirion SPS030 showed similar slopes for the candle and for the incense, potentially showing that this model of sensor can perform well for particles with different size distributions, which is also supported by the similar coefficients of variation obtained for the two types of smokes. The low signal shown by the Alphasense OPC-R1 for incense may be explained by the fact that most of the particles in the incense smoke are outside of its range of detection which is
. It would be important to study this sensor with an additional source of pollution with a higher mean diameter.
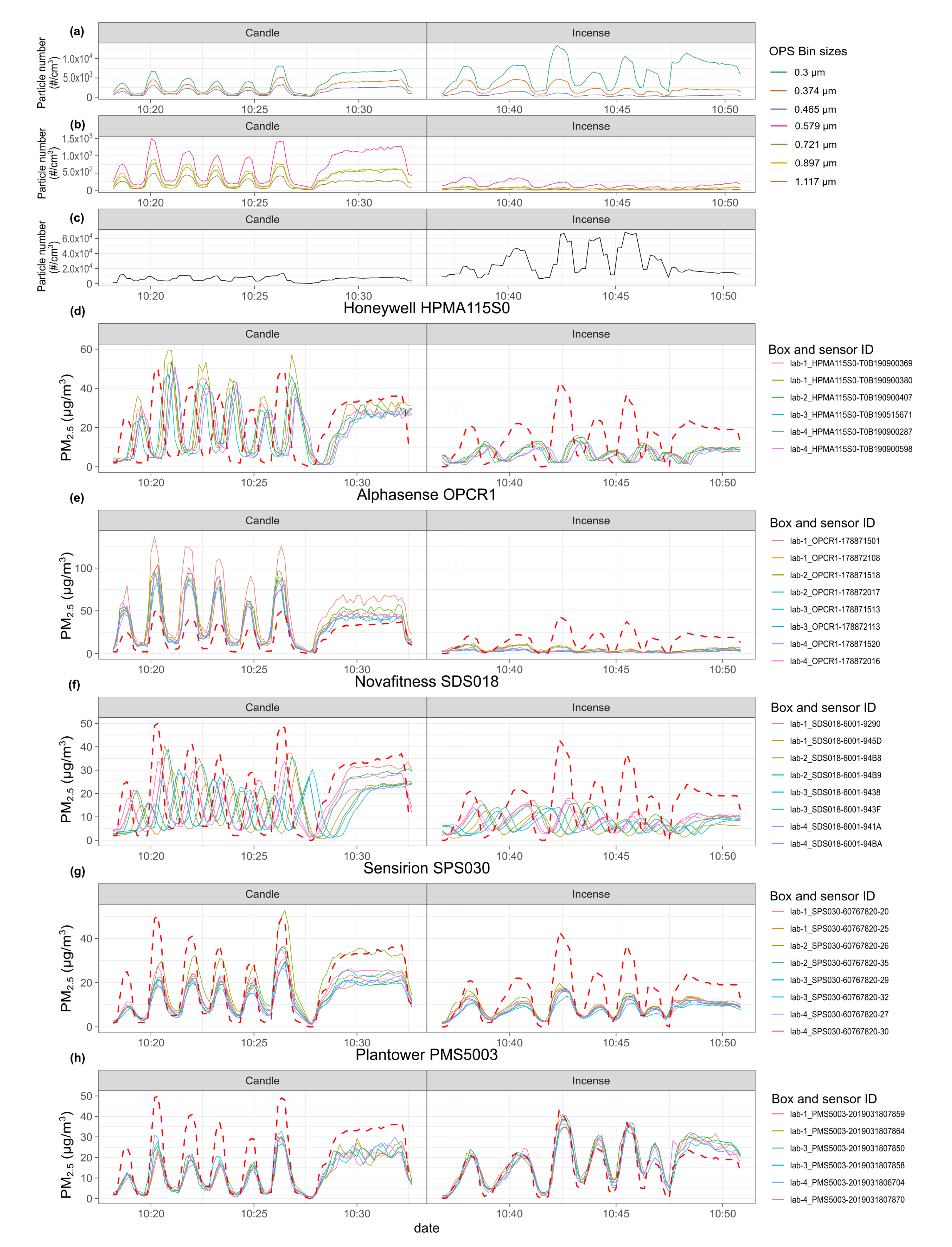
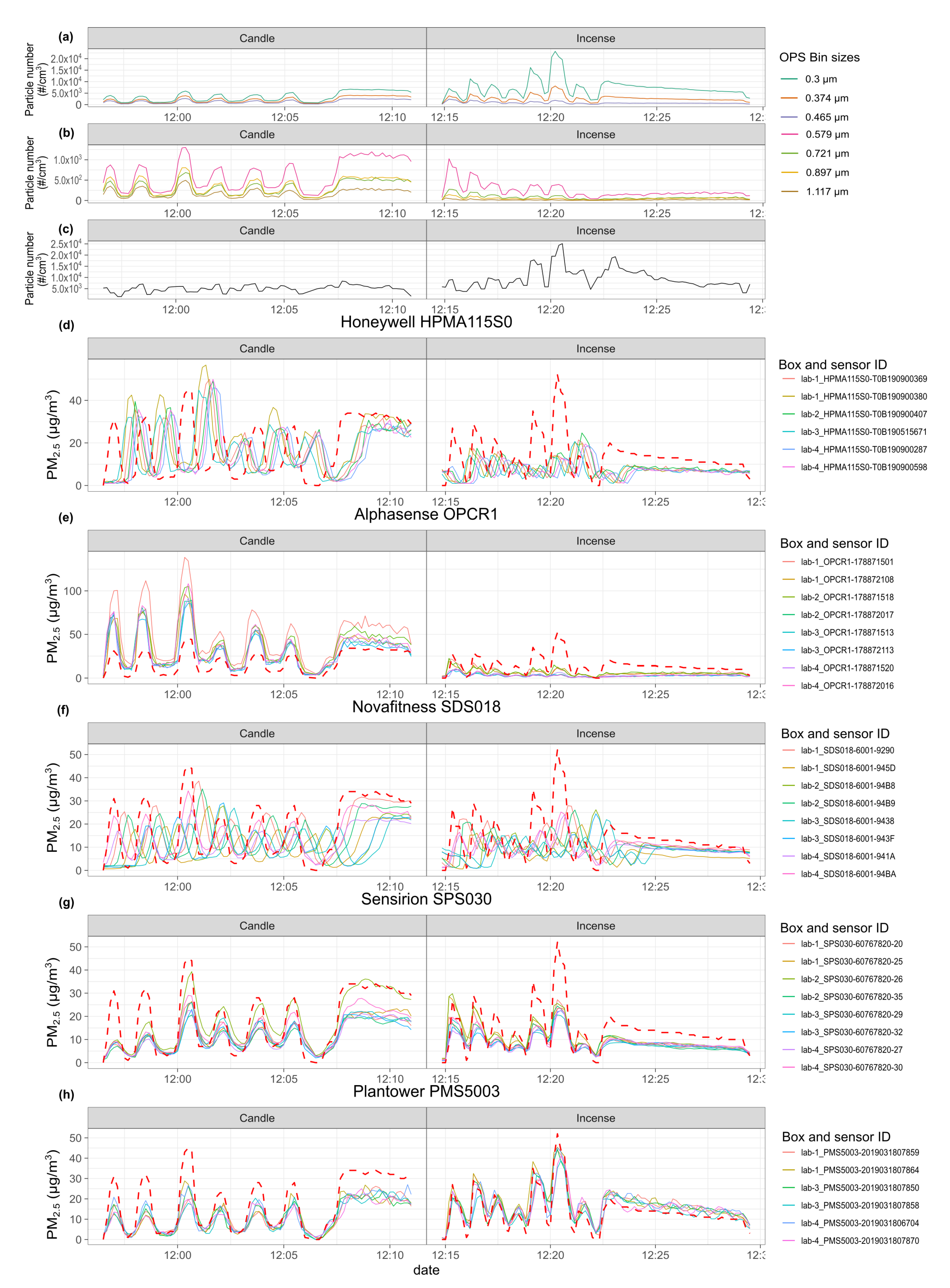
The variation between experiment 3 and experiment 4 for incense PM may be due to the size distribution, where experiment 4 had mostly ultrafine particles and experiment 3 had more of the larger particles than any other experiments with similarly high levels of ultrafine particles than experiment 4. The particle size distributions of experiments 3 and 4 were different from the particle size distributions of 1, 2 and 5 which were more similar to each other. This supports the observation that the Honeywell HPMA115S0 and Novafitness SDS018 seem to perform better for larger particles and the Plantower PMS5003 and Sensirion SPS030 better at smaller particles. This may also suggest that the sensors are more susceptible to changes in the particle size distribution than to relative humidity.
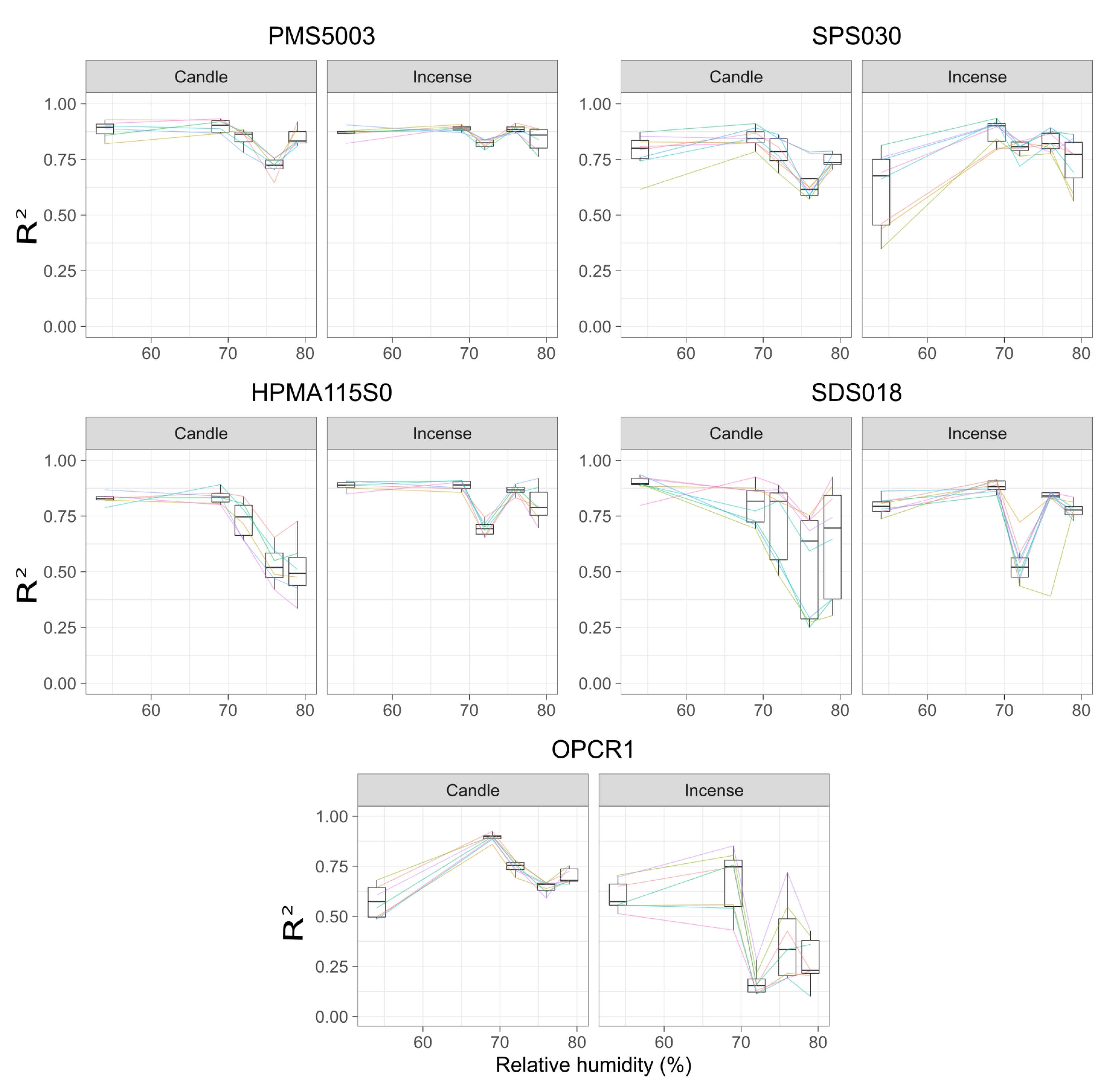
The drop in the slope and Pearson coefficient for candle particles seen during experiment 4 can be explained by a greater proportion of small and ultrafine particles than in the other experiments. This experiment showed the highest number of ultrafine particles and the lowest total number of particles >
. The low-cost sensors studied here cannot detect particles <
while the DustTrak can detect particles down to
. The two different smokes also have different refractive indices and hygroscopic properties which will influence the readings of the sensors [
70,
71]. The hygroscopicity will also affect directly how the particles react with varying humidity. After taking into account the particle distributions of experiments 3 and 4, it can be observed that the Plantower PMS5003 tends to have higher slopes for RH above 72% while the four other models of sensors the slope decreases above 72%. The range of RH attained in this study may not be sufficient to capture the impact of this environmental factor and the behaviour of the sensors may change for higher levels of RH. While it is possible to observe the impact of RH on the readings of the sensors, its effect is limited and is certainly less pronounced than the size distribution of the particles and the source of pollution although it is possible that using different sources of pollution would yield different results. Further analysis focusing on the size distribution reported by the Plantower PMS5003, the Sensirion SPS030 and the Alphasense OPC-R1 rather than on the mass concentration, may yield more details on the capacity of these models of sensors to track sources of pollution.
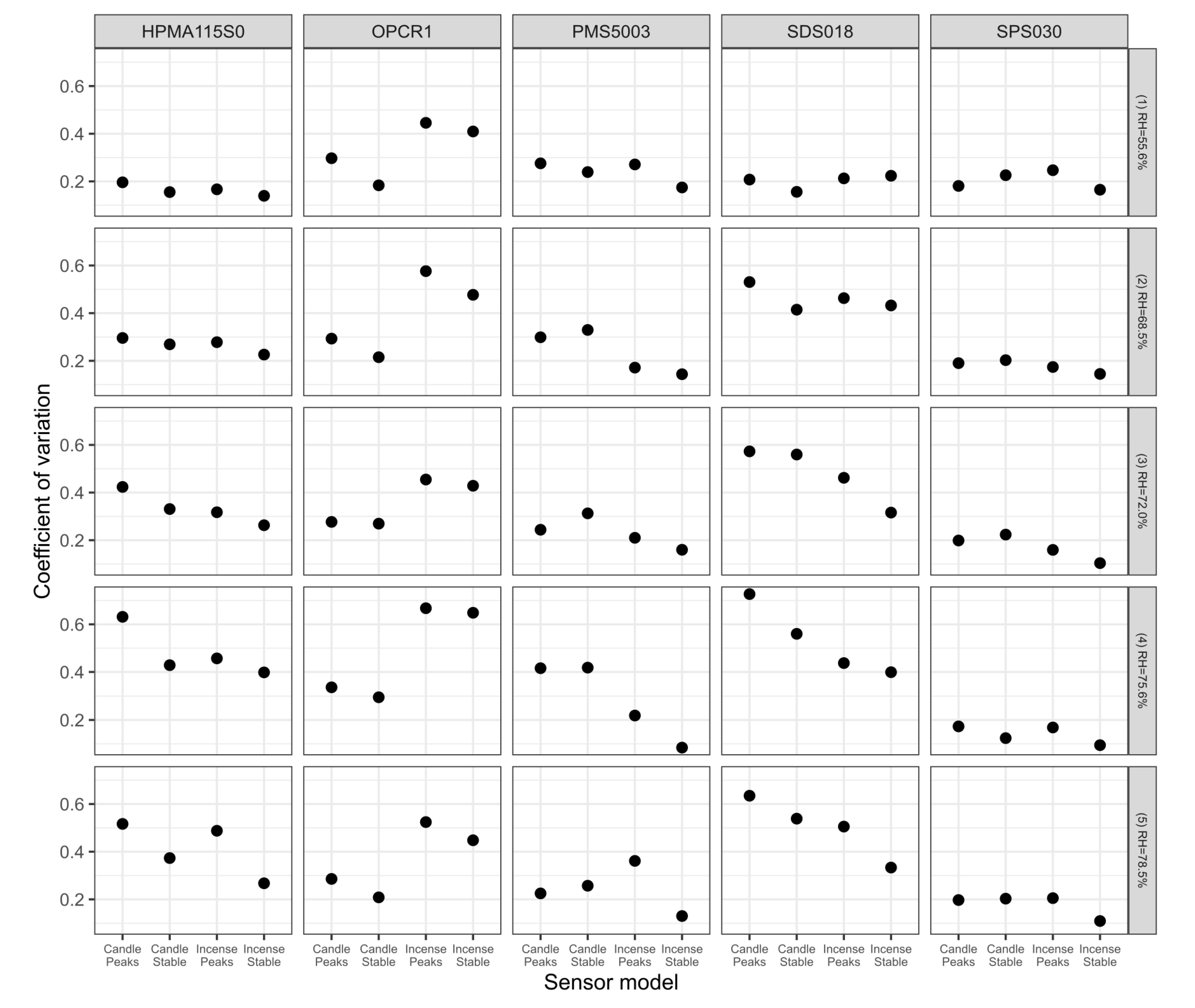
All the sensors registered the different peaks of pollution generated, with varying intensity depending on the model considered. The coefficient of variation showed that the sensors were generally more precise when measuring stable concentrations of pollution than peaks of pollution except for the Plantower PMS5003 and the Sensirion SPS030 for candle. The Sensirion SPS030 yielded coefficients of variation of 0.19 for both incense and candle peaks showing that while they did not meet the 0.1 requirement for legal monitoring of PM the two models of sensors still have the capacity to qualitatively monitor peaks of pollution. The Plantower PMS5003 is well-able to characterise peaks of incense smoke, but less able for candle particles. After calibration, the Plantower PMS5003 is the model of sensor that yielded the best results for the ratio of peaks of PM for both sources of PM, followed by the Sensirion SPS030. This illustrate the need to calibrate the sensors in conditions as close as possible to their actual condition of use. Given, the different sensitivity of the model of sensors to different sources of pollution and of different size distribution, it may be fruitful to use a combination of different models to track sources of pollution. A combination of two sensors may also prove interesting for the post-processing of the data to detect faults or erroneous data by comparing the two models of sensors. Johnston et al. [
49] present the evolution the versions of an Air Quality Internet of Things device from hosting four sensors to ten sensors going from
$900 to
$1000. Camprodon et al. [
83] present another air quality monitoring device which can host one or two Plantower PMS5003 for respectively
$120 or
$170. Other commercially available devices are using two PM sensors [
84,
85]. The above examples show that it is technically and economically possible to use two different models of low-cost PM sensors at the same time. Given the potential of providing us information beyond PM mass concentrations, it is advised to further test this solution in field conditions with sensors deployed for a long term as a network of sensors.
5. Conclusions
This study determined the LLOD of the sensors using two different methods, both of which showed a LLOD <1 /. However, it is argued that these methods do not give a full characterisation of the precision and accuracy of the sensors when sampling low concentrations of PM. Indeed, the results obtained by these two methods are an order of magnitude different from the values obtained by other outdoor studies. The delay observed on some models of sensors has implications regarding the choice of sensors to be used for measurements with a sampling period <1 . The correction method used here, while being suitable for post-treatment of the measurement, would not be suitable for real time correction unless the sensors were collocated with a reference instrument. The coefficient of variation calculated for the sensors are above the maximum required for ambient PM monitoring but they showed promising results regarding the use of some of the sensors tested to identify transient pollution events and track events of pollution if placed as a network. This coefficient enabled differentiation of the performance of the sensors, for sources of pollution and for peaks against stable concentration of pollution, and is a valid metric for the cross-comparison of the sensors.
The sensors tested were able to detect the <1 min events of pollution generated from both sources, although with varying degrees of precision. This suggests that the short time and intensity peaks observed in the time-series of the sensors during outdoor deployment study are genuine.
The sensors showed a strong sensitivity to the source of PM and to the size distribution of the particles generated. This sensitivity was different for different models of sensors suggesting that using a combination of different models of sensors could be interesting to provide additional data to PM mass concentration and to assist fault detection and data post-processing. Further work is required to understand the capacity of the sensors to differentiate particle sizes and would benefit from a detailed study of the particle size distributions reported by the sensors.
The calibration performed between the sensors and the DustTrak reduced the bias between the sensors and the DustTrak for some of the sensors but not for all. The calibration also yielded different results for the two sources of pollution suggesting that some sensors may be better suited than others to track specific sources of pollution, independent of the aerosol source that has been used for their initial factory calibration.
The performance of some of the models of sensors for peaks of pollution, their different sensitivity to sources and particle distribution, and their capacity to measure <10 suggests that using a combination of PM sensors may improve the current capacity to identify transient pollution events and track sources or events of pollution. The deployment of a network of a combination of low-cost PM sensors around an urban area including collocations with reference grade instruments is the next step to achieve this goal.

 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















