
Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology


Abstract
:1. Introduction
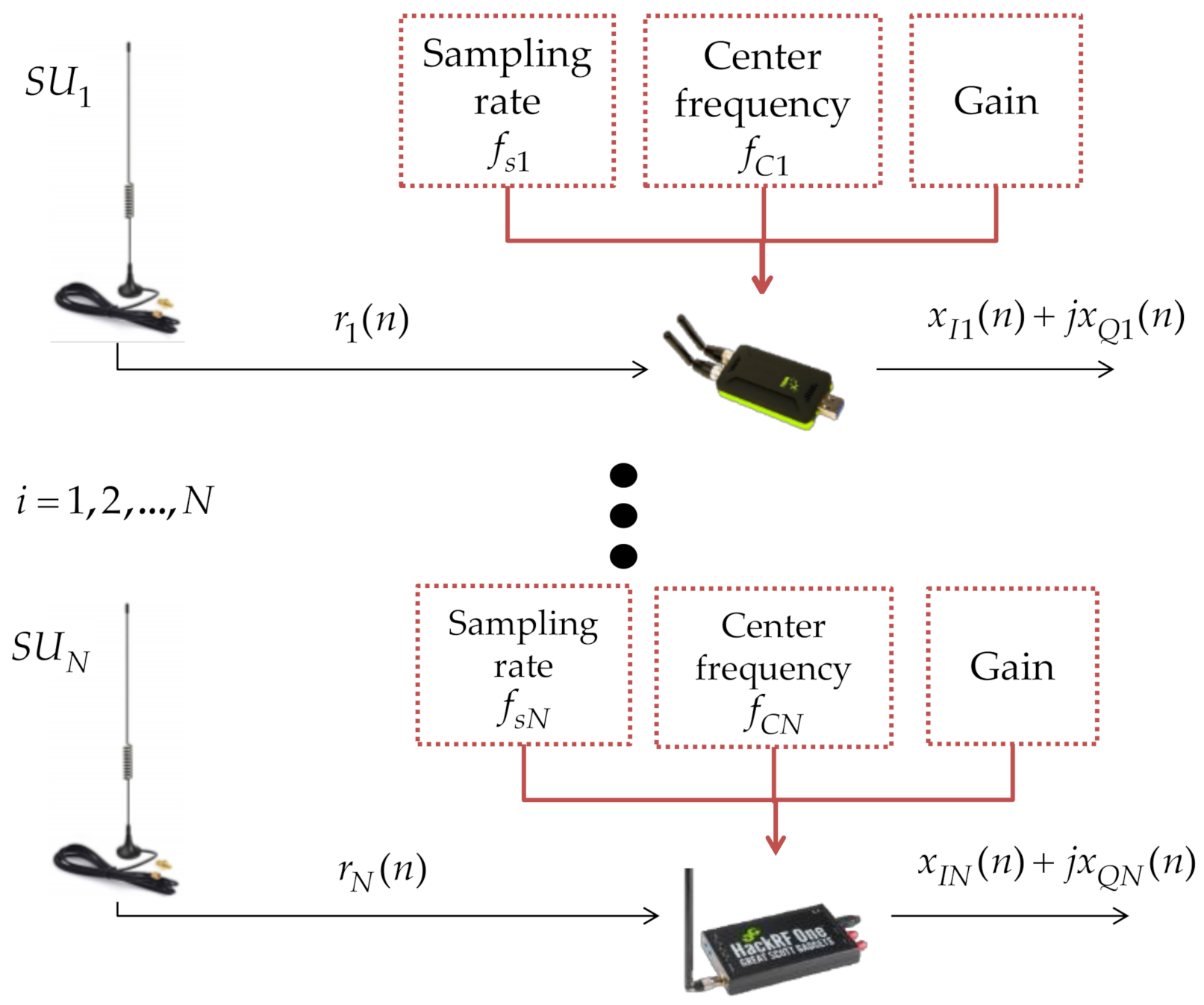
2. Software-Defined Radios
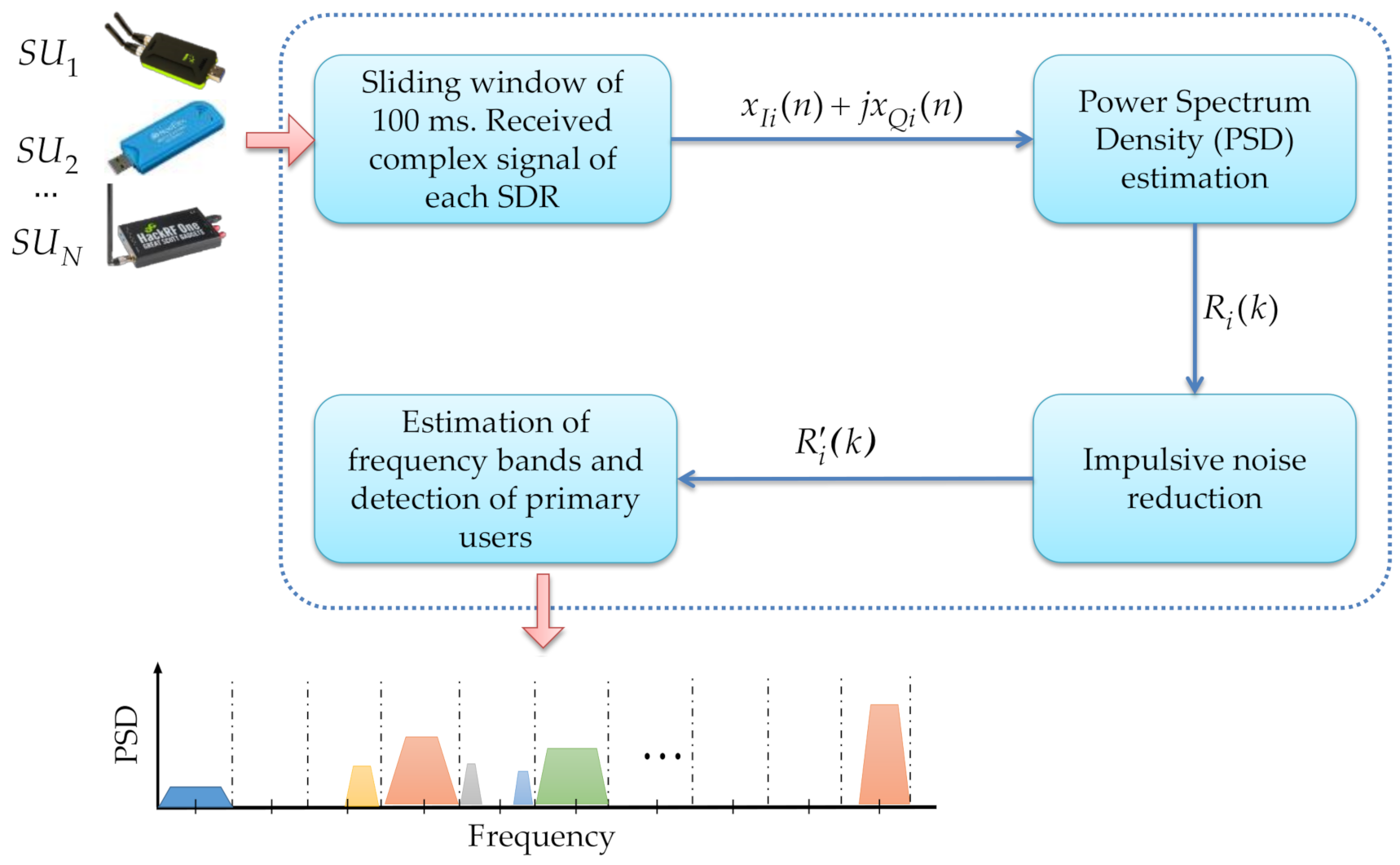
3. Implementation of MBSS Technique Using SDR Technology
3.1. Sliding Time Window
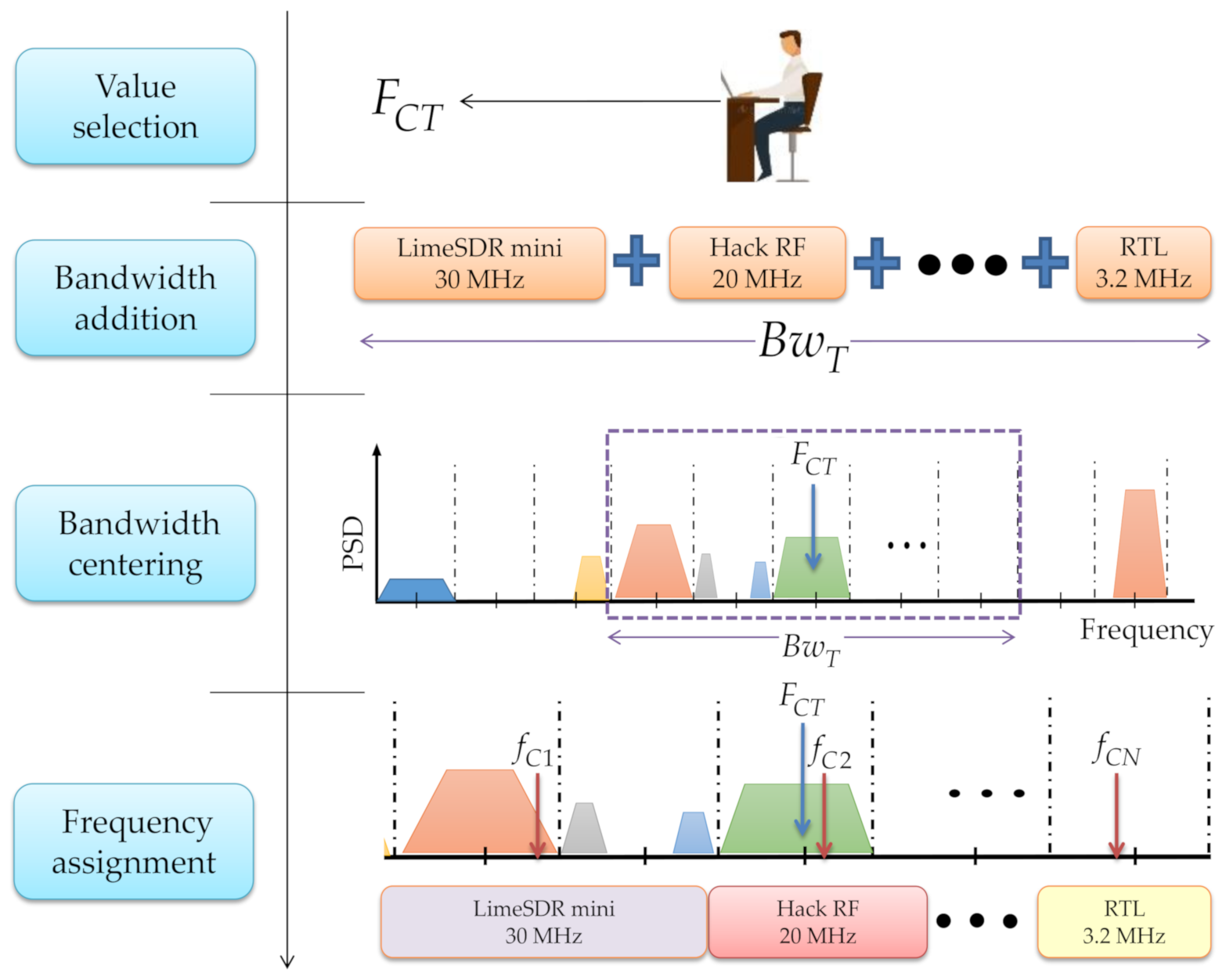
- The bandwidth of each connected SDR device is added to conform the complete bandwidth to be observed.
- The total bandwidth is centered in .
- Lastly, the center frequency of each connected device is assigned.
- Steps are repeated every time the value of is changed.
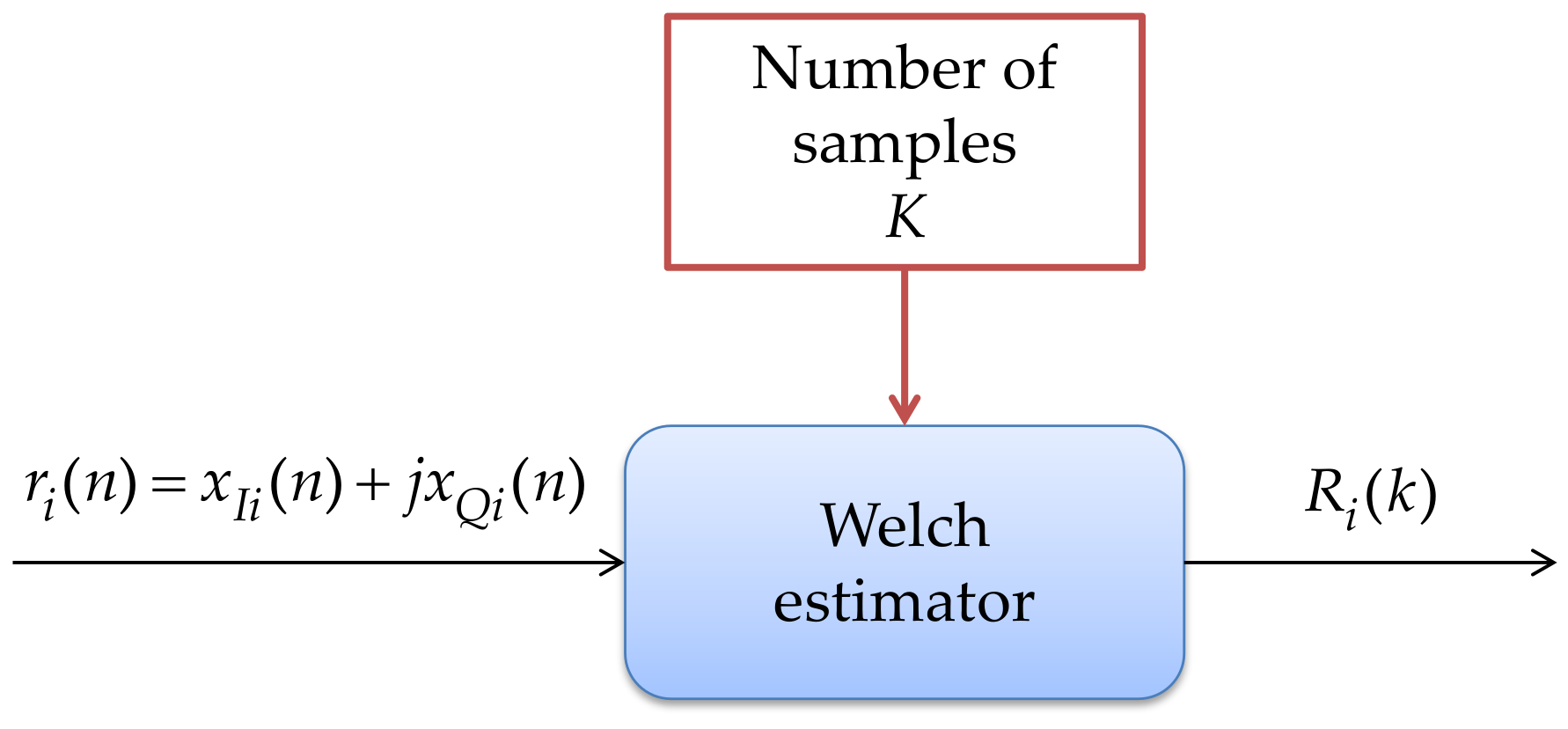
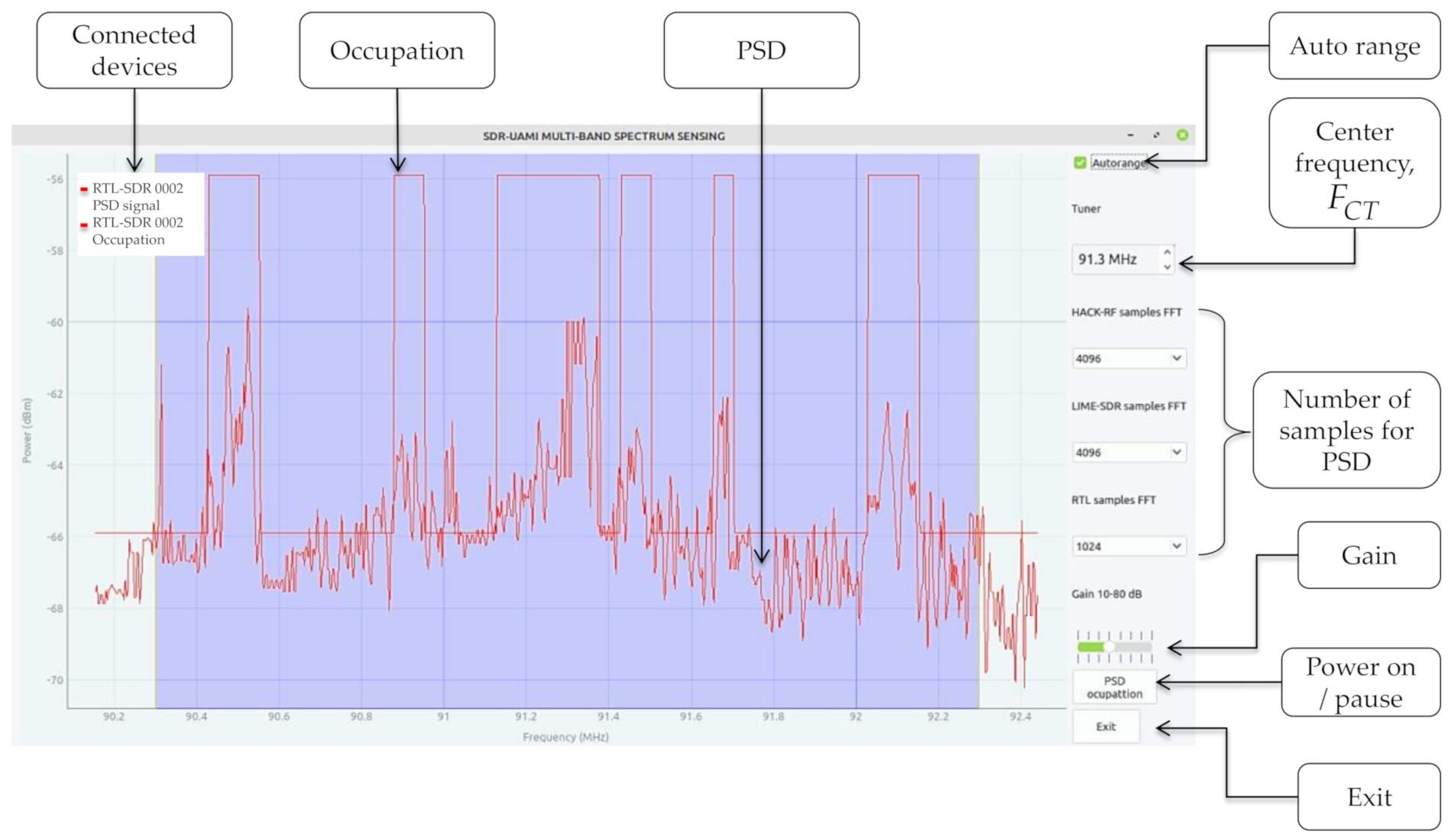
3.2. Power Spectrum Density Estimation
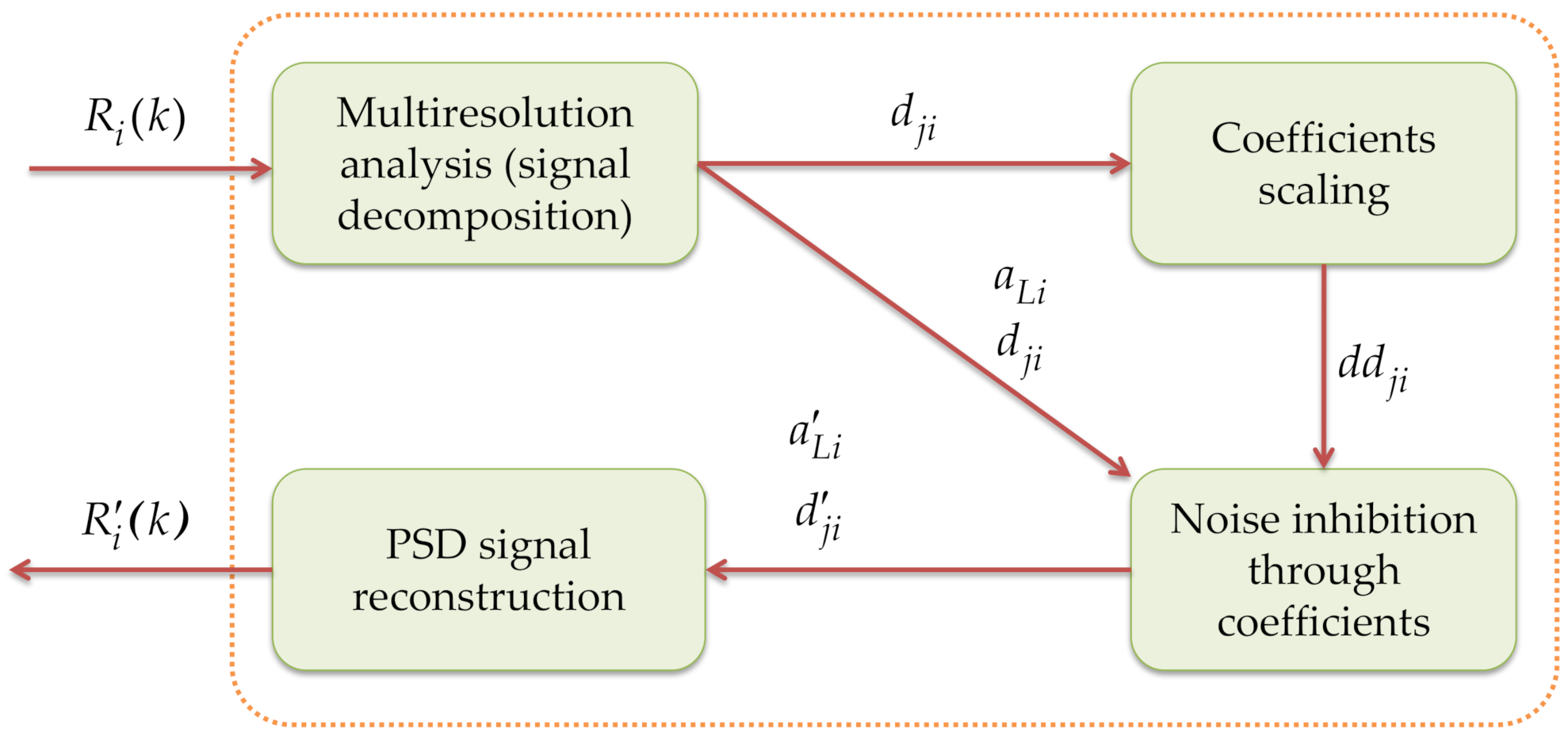
3.3. Impulsive Noise Reduction
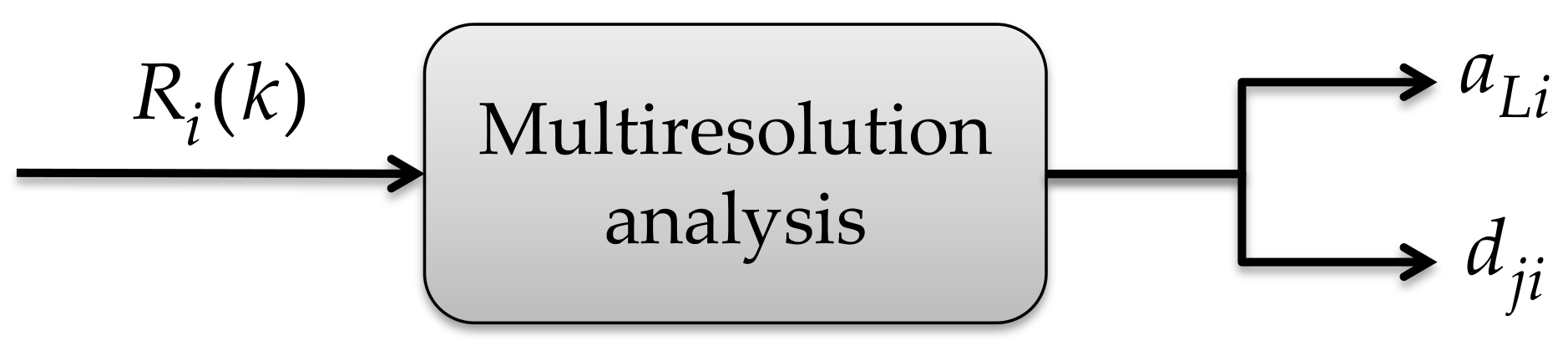
3.3.1. Multiresolution Analysis: PSD Decomposition
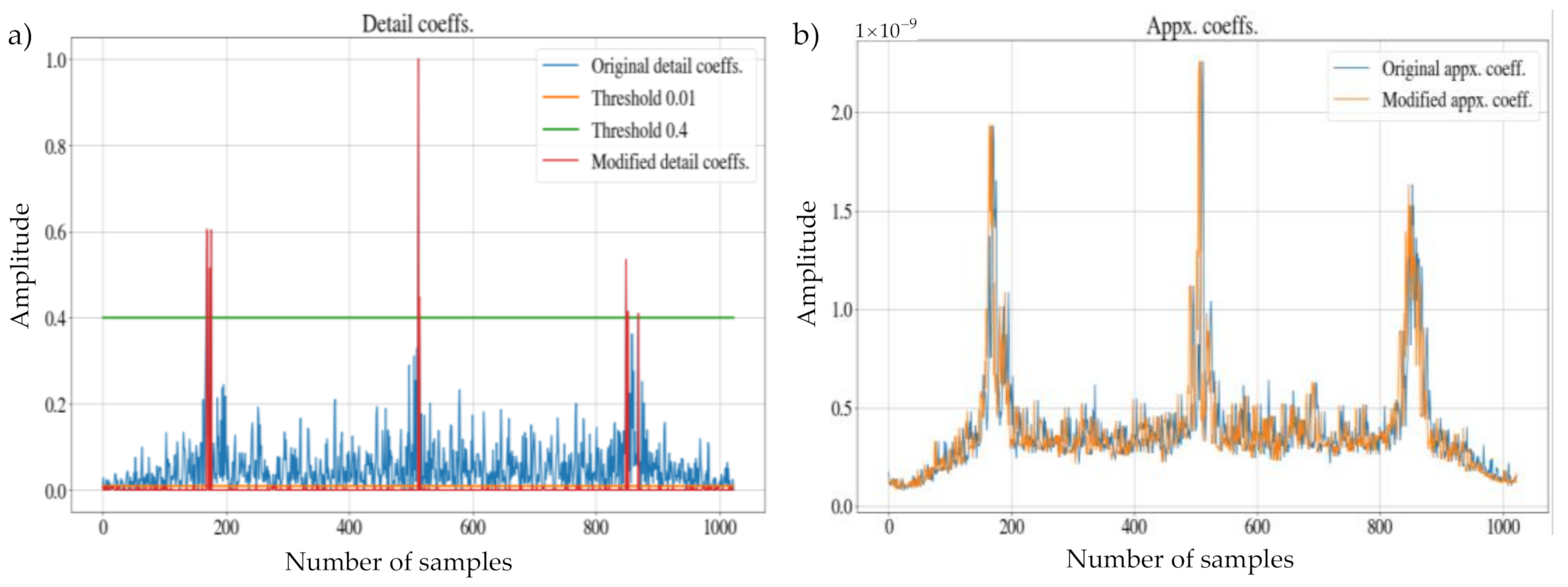
3.3.2. Coefficient Scaling
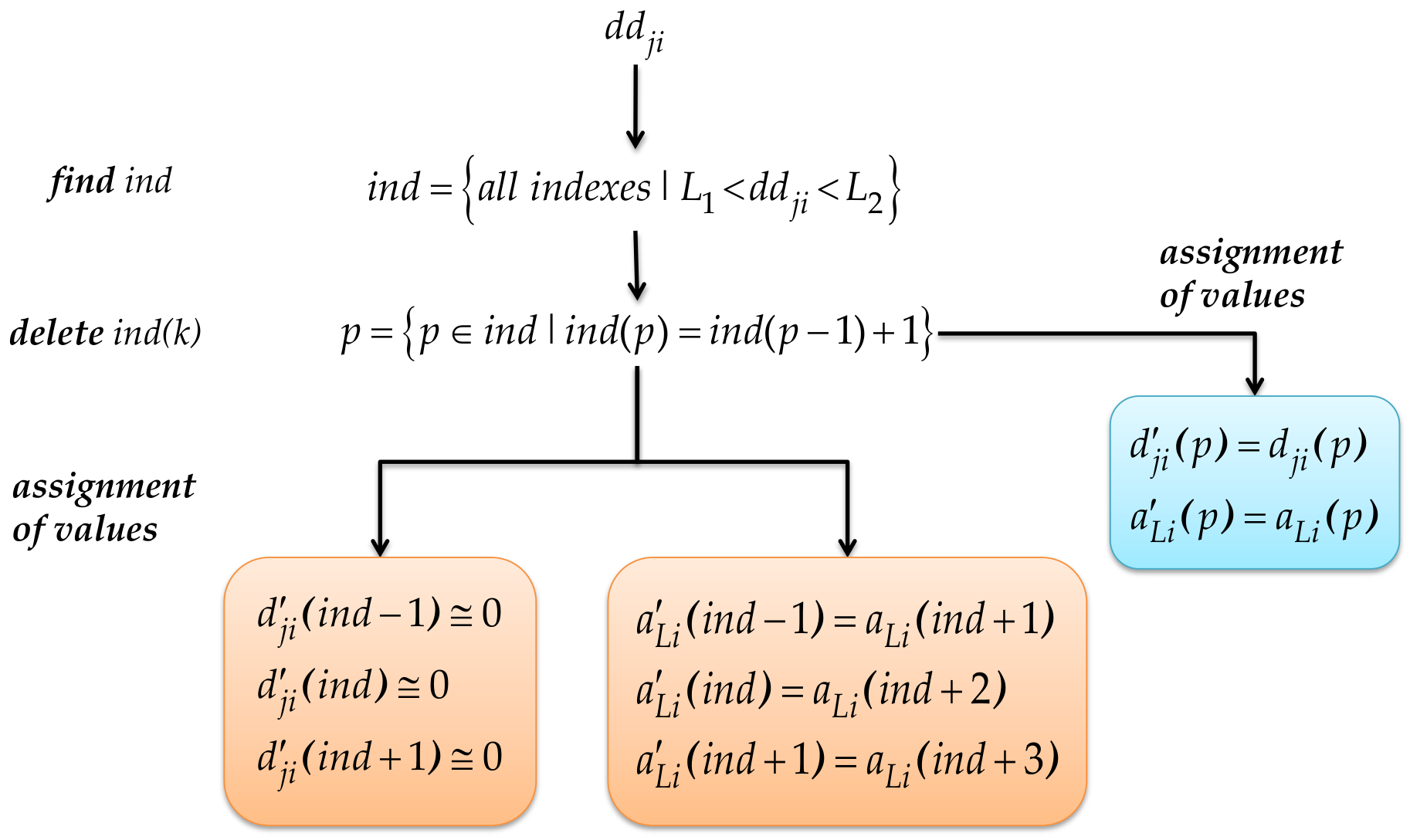
3.3.3. Noise Inhibition through Coefficients
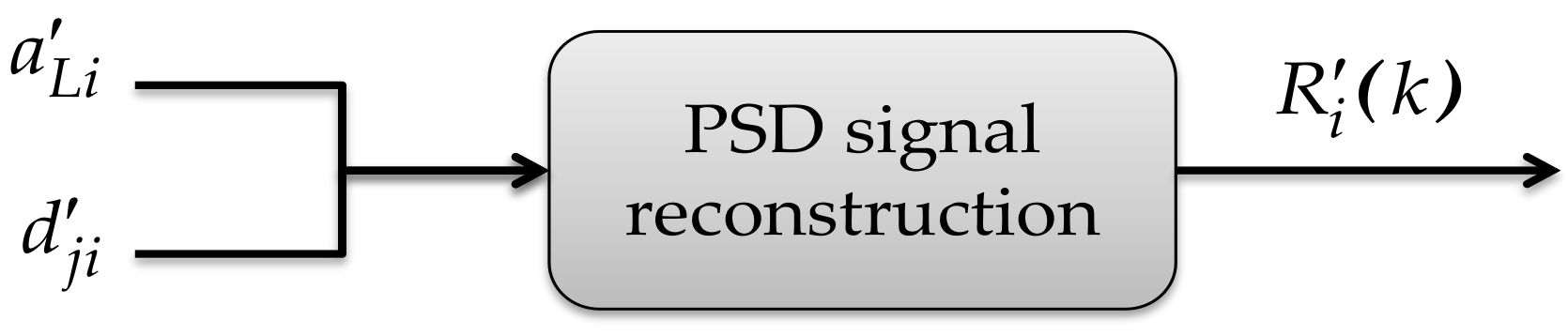
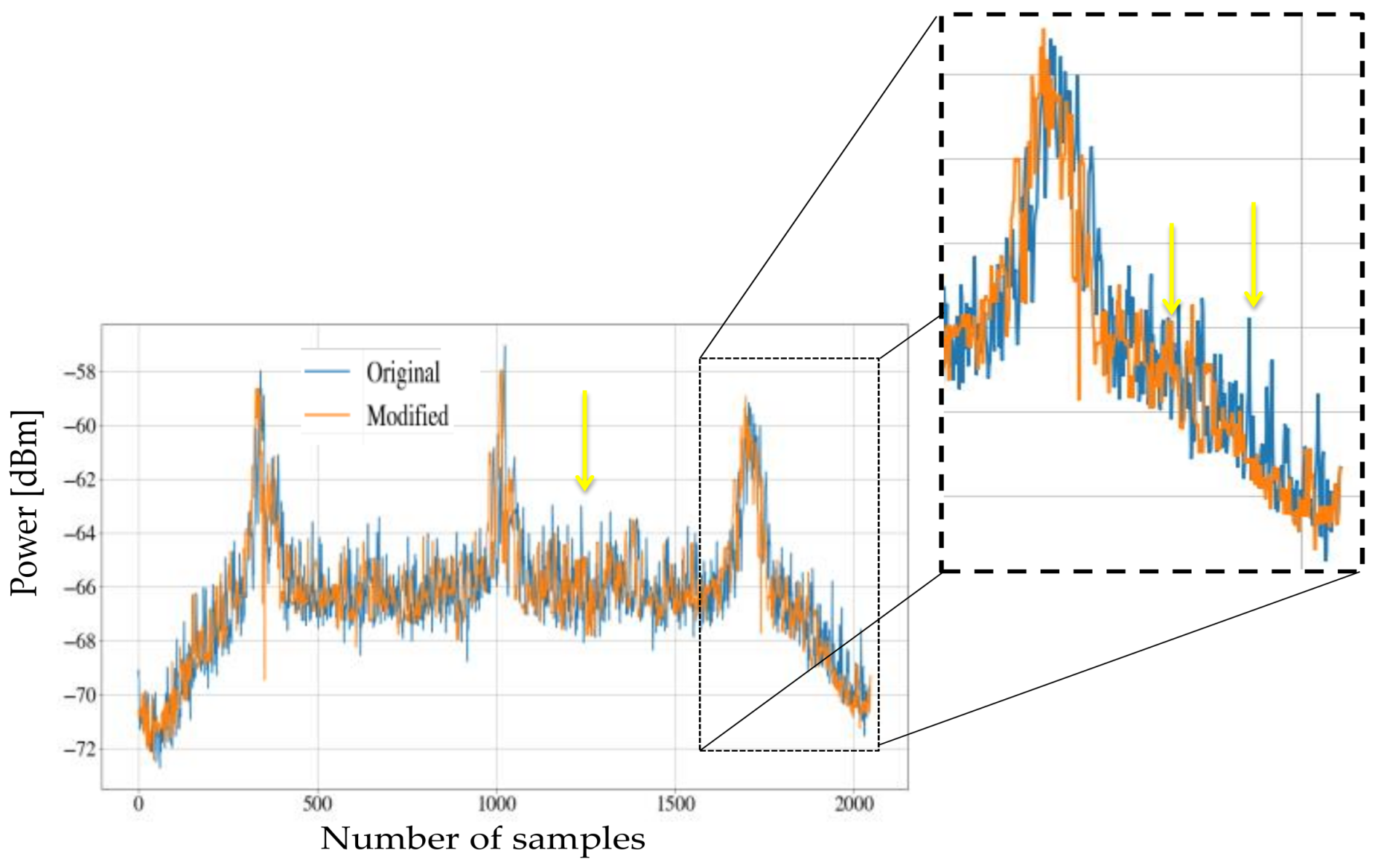
3.3.4. PSD Signal Reconstruction
3.3.5. Impulsive Noise Reduction Algorithm
- Function noise_reduction ():
- ; = pywt.wavedec (, ‘db1’, )
- = reescale ()
- = find ( & )
- for p in range (len()-1,2,−1):
- aux =[p−1]
- if [p] == aux + 1
- = delete (,[p−1])
- = pywt.waverec (; , ‘db1’,‘symmetric’)
- return ( )
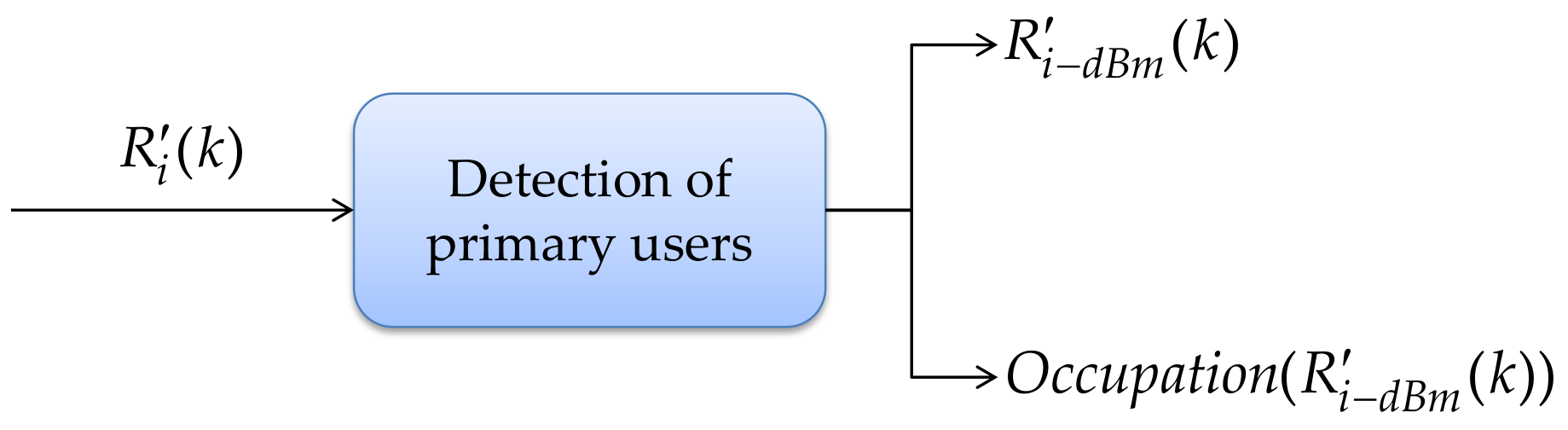
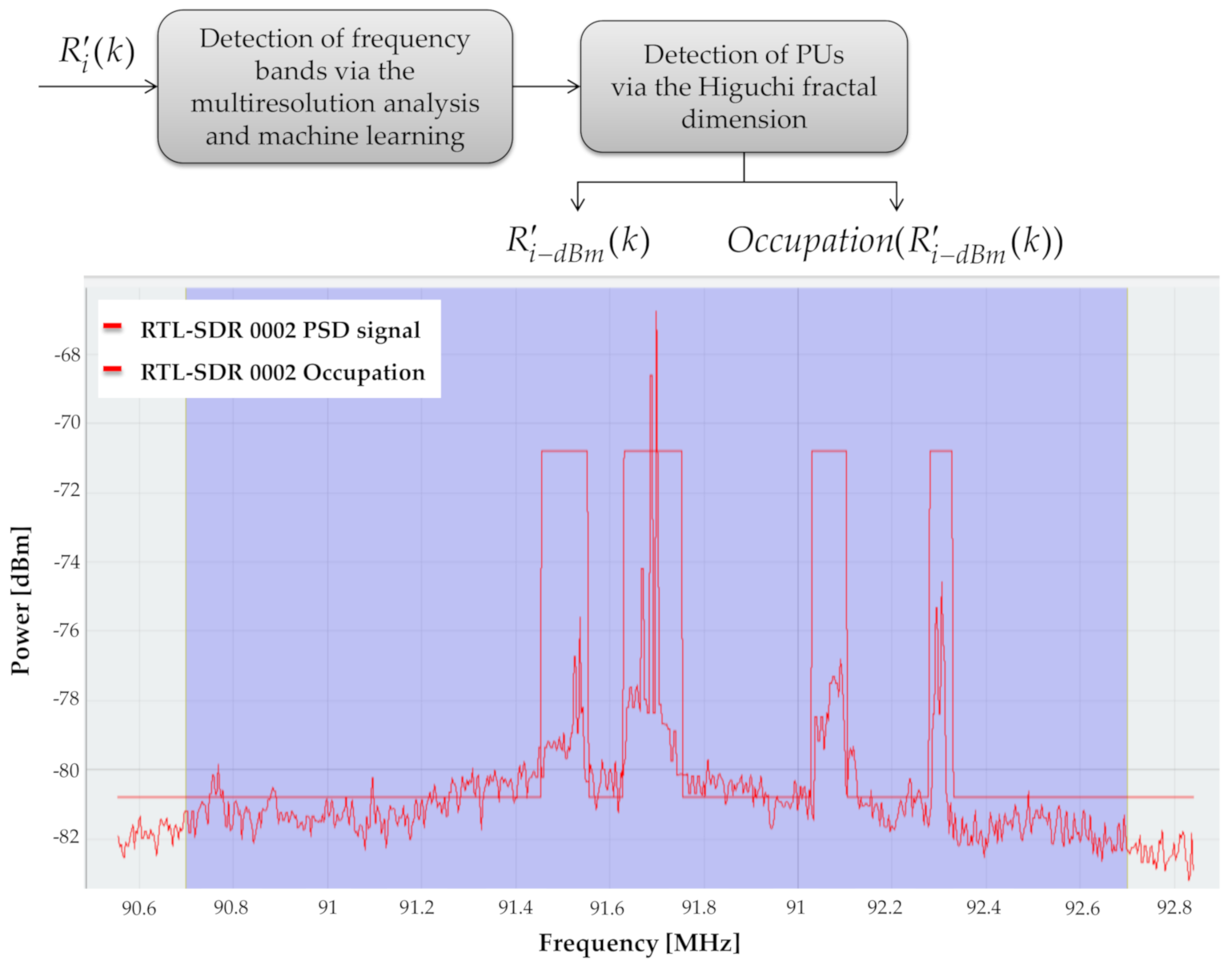
3.4. Detection of Primary Users
4. Real-Time Experiments and Results
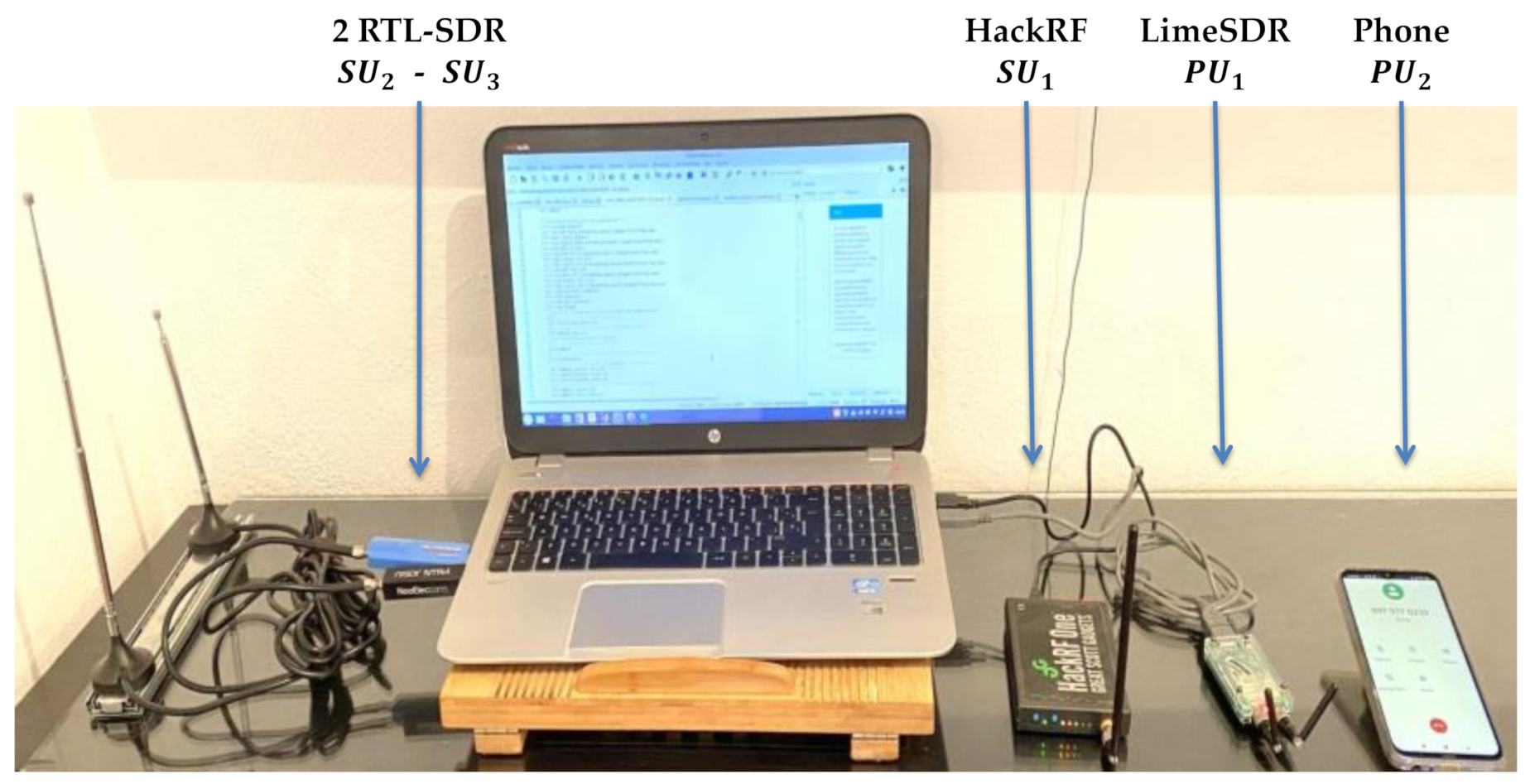
4.1. Implemented Scenario
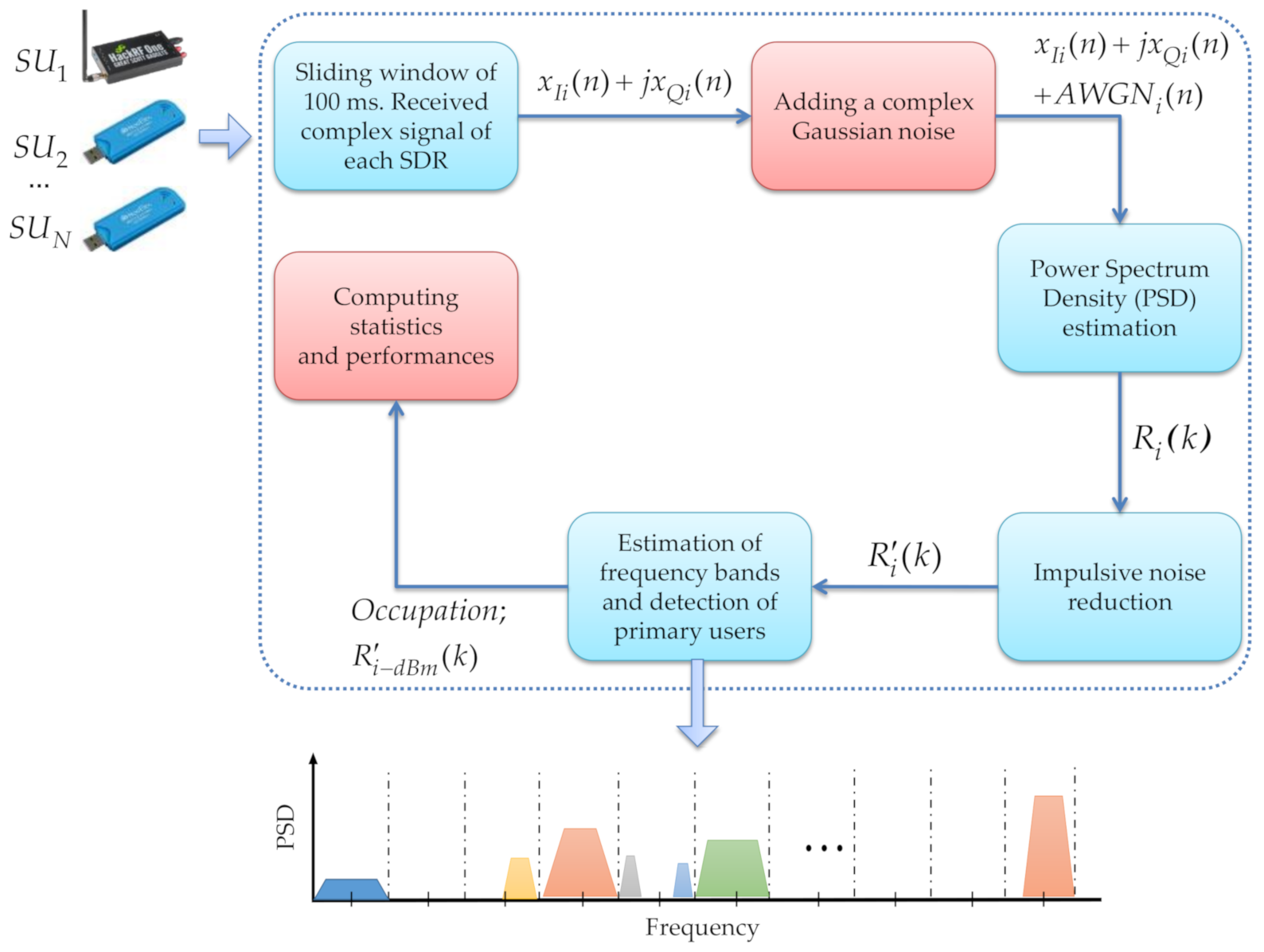
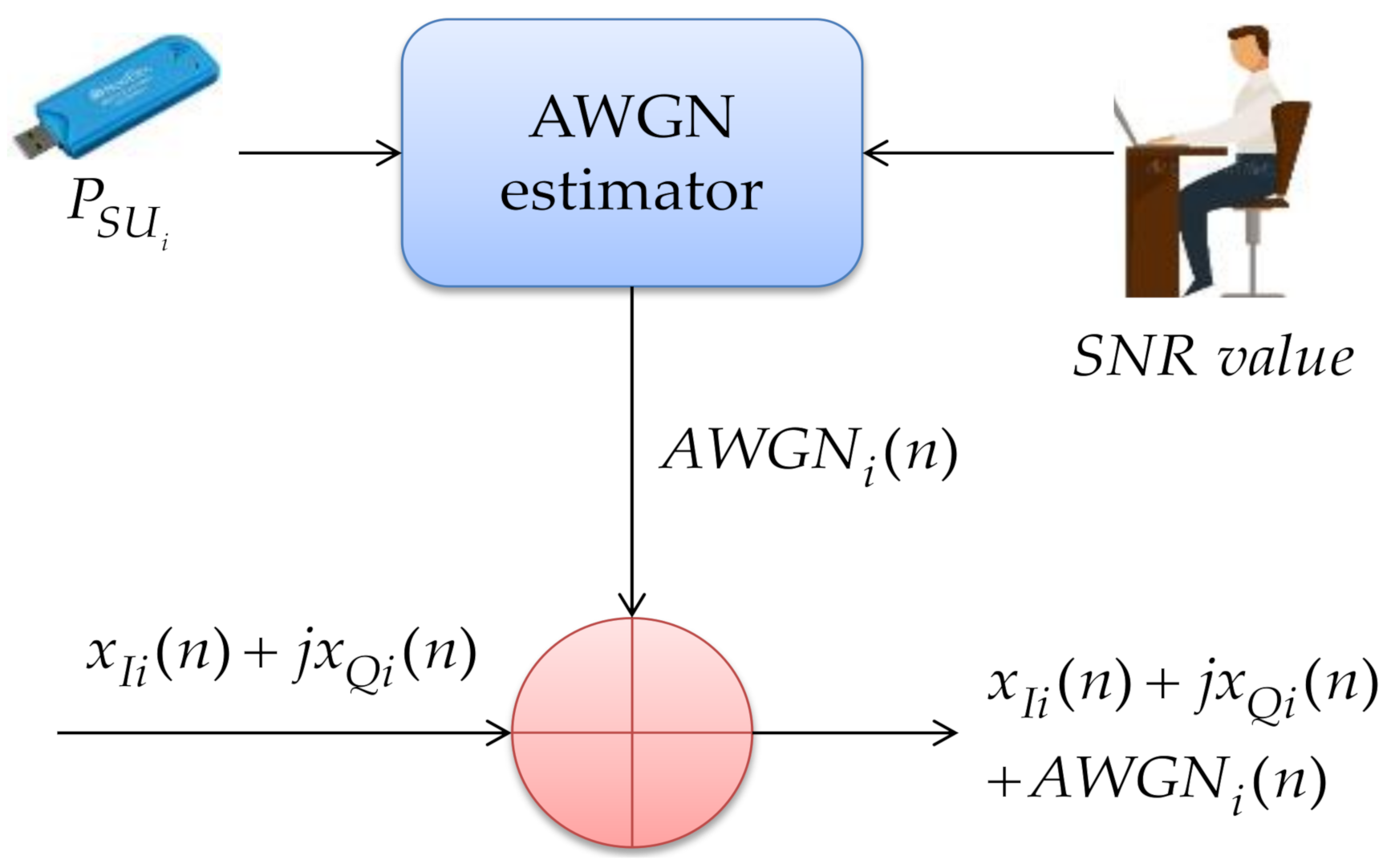
4.2. Signal Processing in the Controlled Implementation
- Function Artificial_Noise_Addition (, , SNR_value)
- Sigma = float (/(10**(SNR_value/10)))
- mu = 0
- real = np.random.randn ((len(pxx)))*(sigma**0.5) + mu
- imag = np.random.randn ((len(pxx)))*(sigma**0.5) + mu
- = real + j*imag
- return()
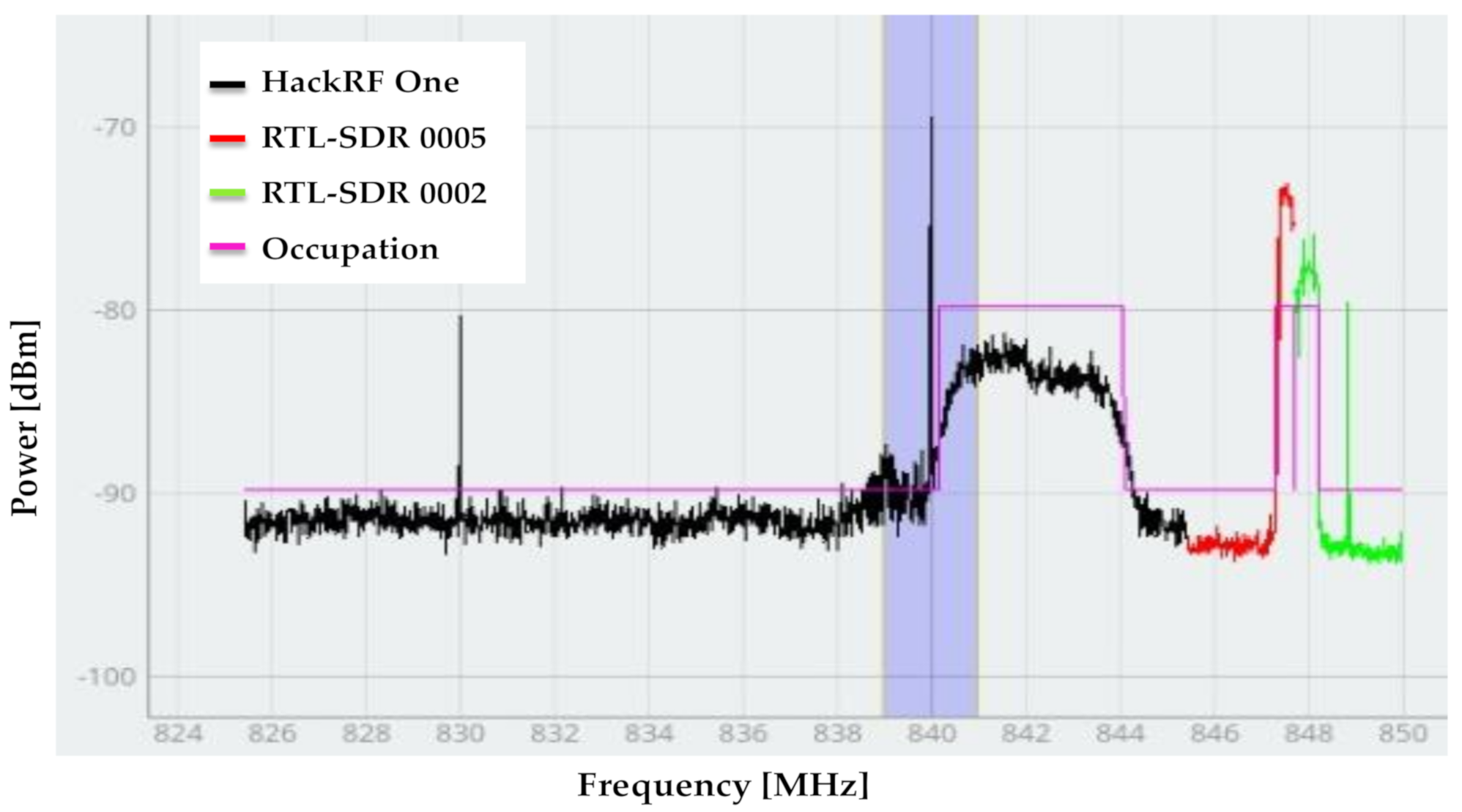
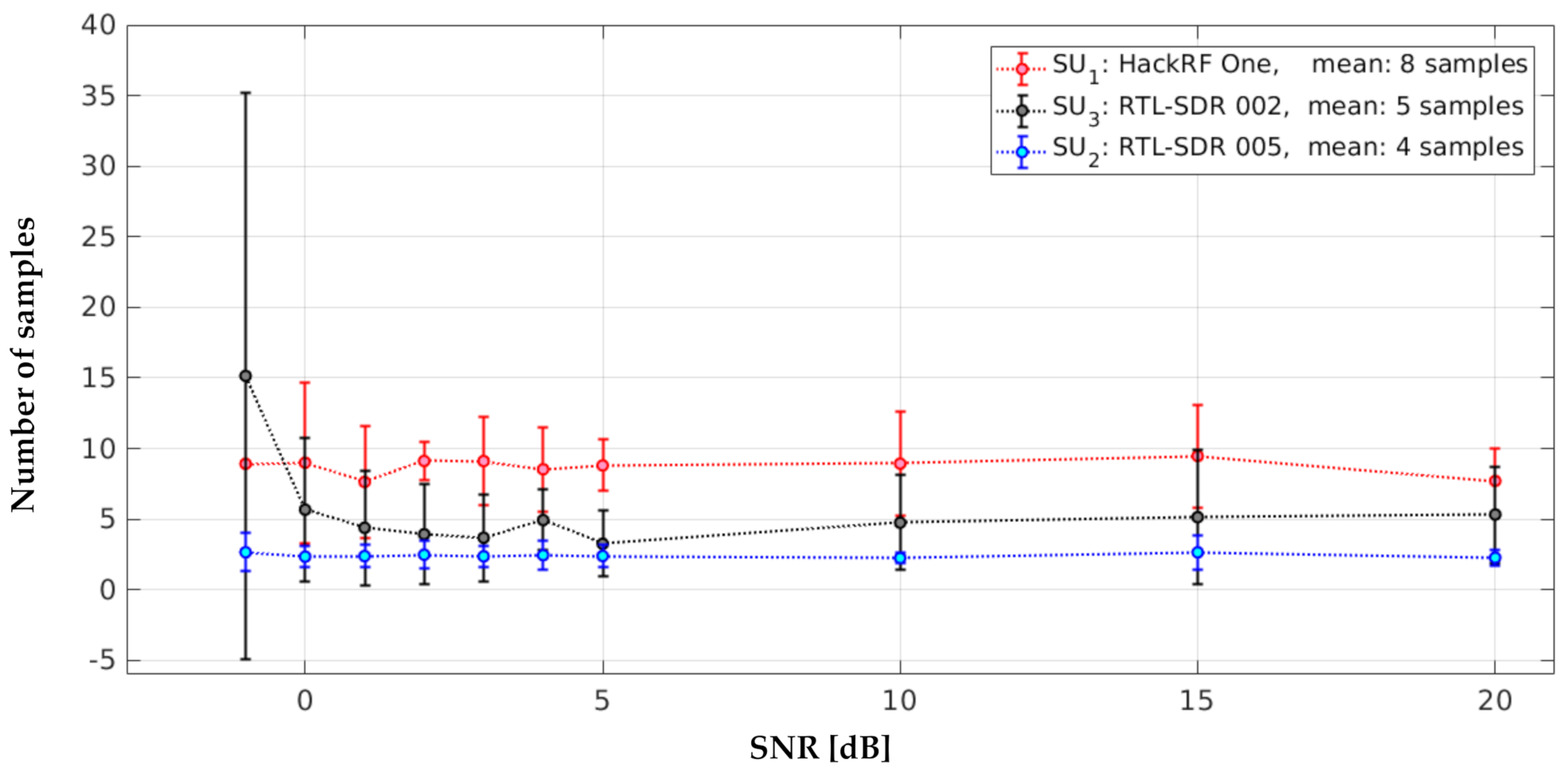
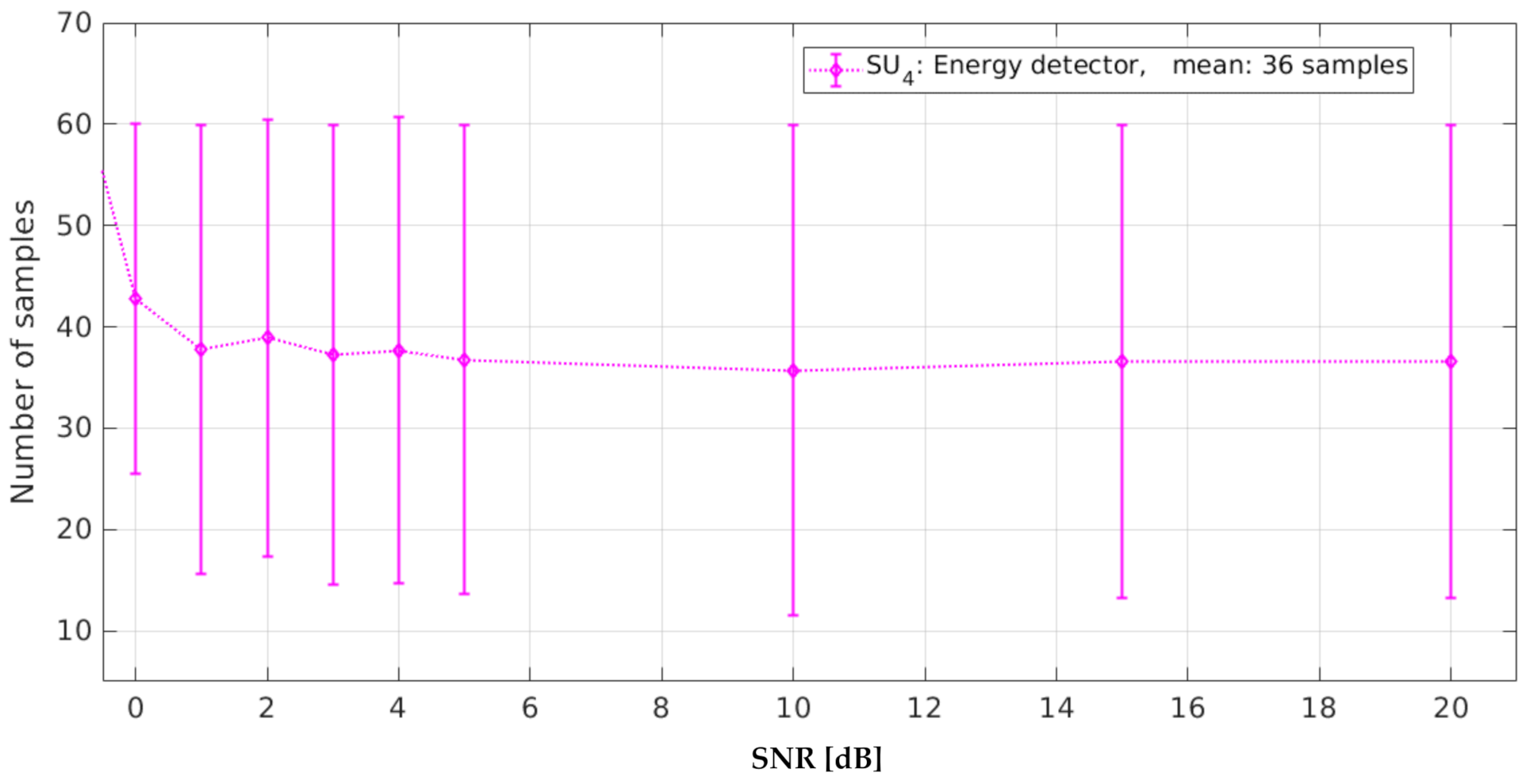
4.3. Results
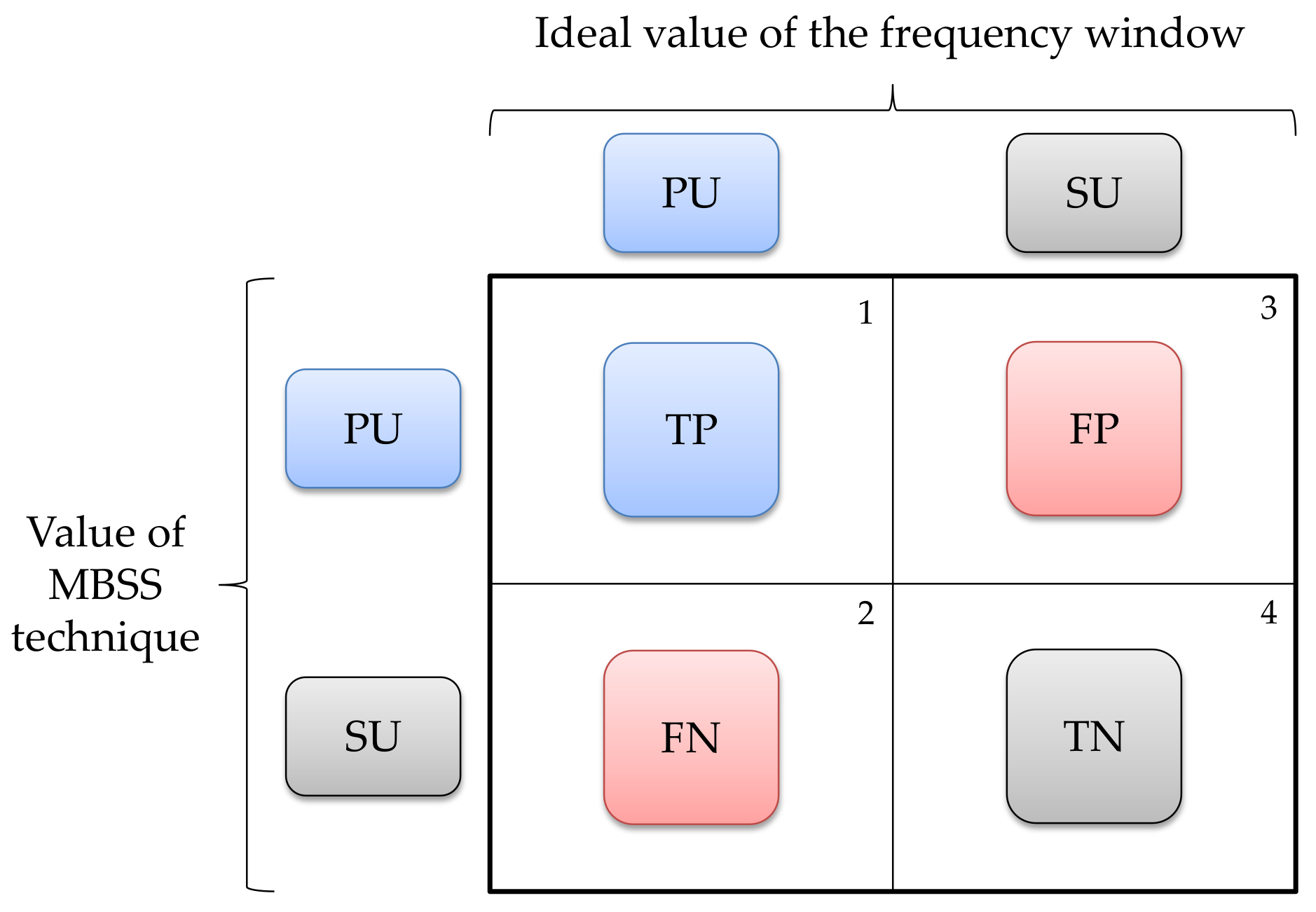
- The window that corresponds to a PU transmission which SU classifies as PU transmission is considered a true positive (TP) value.
- The frequency window that corresponds to a PU transmission which SU classifies as noise is considered a false negative (FN) value.
- The window that corresponds to noise which SU classifies as a PU transmission is considered a false positive (FP) value.
- The frequency window that corresponds to noise which SU classifies as noise is considered a true negative (TN) value.
4.4. SDR–UAMI–MBSS Application
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CR | Cognitive radio |
| SU | Secondary users |
| PU | Primary users |
| MBSS | Multiband spectrum sensing |
| SNR | Signal-to-noise ratio |
| IoT | Internet of things |
| ED | Energy detector |
| MRA | Multiresolution analysis |
| ML | Machine learning |
| HFD | Higuchi fractal dimension |
| SDR | Software-defined radio |
| USRP | Universal software radio peripheral |
| MIMO | Multiple-input multiple-output |
| Tx | Transmitters |
| Rx | Receivers |
| PSD | Power spectral density |
| MSPS | Mega samples per second |
| AWGN | Additive white Gaussian noise |
| PS | Probability of success |
| TP | True positive |
| FN | False negative |
| FP | False positive |
| TN | True negative |
References
- Mitola, J.; Maguire, G.Q. Cognitive Radio: Making Software Radios More Personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Akyildiz, I.F.; Lee, W.-Y.; Vuran, M.C.; Mohanty, S. Next Generation/Dynamic Spectrum Access/Cognitive Radio Wireless Networks: A Survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- Masonta, M.T.; Mzyece, M.; Ntlatlapa, N. Spectrum Decision in Cognitive Radio Networks: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 1088–1107. [Google Scholar] [CrossRef] [Green Version]
- Awin, F.A.; Alginahi, Y.M.; Abdel-Raheem, E.; Tepe, K. Technical Issues on Cognitive Radio-Based Internet of Things Systems: A Survey. IEEE Access 2019, 7, 97887–97908. [Google Scholar] [CrossRef]
- Arjoune, Y.; Kaabouch, N. A Comprehensive Survey on Spectrum Sensing in Cognitive Radio Networks: Recent Advances, New Challenges, and Future Research Directions. Sensors 2019, 19, 126. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Liang, J.; Xiao, N.; Yuan, X.; Zhang, Z.; Hu, M.; Hu, Y. Adaptive Double Threshold Energy Detection Based on Markov Model for Cognitive Radio. PLoS ONE 2017, 12, e0177625. [Google Scholar] [CrossRef] [Green Version]
- Ejaz, W.; Ibnkahla, M. Multiband Spectrum Sensing and Resource Allocation for IoT in Cognitive 5G Networks. IEEE Internet Things J. 2018, 5, 150–163. [Google Scholar] [CrossRef]
- Alijani, M.; Osman, A. Calculate the Optimum Threshold for Double Energy Detection Technique in Cognitive Radio Networks (CRNs). In Proceedings of the 10th International Conference on Research in Engineering, Science Technology, Rome, Italy, 21–23 February 2020; pp. 1–13. [Google Scholar]
- Mallat, S.G. A Theory for Multiresolution Signal Decomposition: The Wavelet Representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef] [Green Version]
- Daubechies, I. Ten Lectures on Wavelets; CBMS-NSF Regional Conference Series in Applied Mathematics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2006; ISBN 978-0-89871-274-2. [Google Scholar]
- Higuchi, T. Approach to an Irregular Time Series on the Basis of the Fractal Theory. Phys. D Nonlinear Phenom. 1988, 31, 277–283. [Google Scholar] [CrossRef]
- Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Ruiz-Boqué, S. Machine Learning Techniques Applied to Multiband Spectrum Sensing in Cognitive Radios. Sensors 2019, 19, 4715. [Google Scholar] [CrossRef] [Green Version]
- Khayyeri, M.; Mohammadi, K. Cooperative Wideband Spectrum Sensing in Cognitive Radio Based on Sparse Real-Valued Fast Fourier Transform. IET Commun. 2020, 14, 1340–1348. [Google Scholar] [CrossRef]
- Kim, J.; Choi, J.P. Sensing Coverage-Based Cooperative Spectrum Detection in Cognitive Radio Networks. IEEE Sens. J. 2019, 19, 5325–5332. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, Z.; Feng, C. Sparsity Order Estimation and Its Application in Compressive Spectrum Sensing for Cognitive Radios. IEEE Trans. Wirel. Commun. 2012, 11, 2116–2125. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Gao, Y.; Liang, Y.-C.; Cui, S. Reliable and Efficient Sub-Nyquist Wideband Spectrum Sensing in Cooperative Cognitive Radio Networks. IEEE J. Sel. Areas Commun. 2016, 34, 2750–2762. [Google Scholar] [CrossRef]
- Kumar, A.; Saha, S.; Bhattacharya, R. Wavelet Transform Based Novel Edge Detection Algorithms for Wideband Spectrum Sensing in CRNs. AEU Int. J. Electron. Commun. 2018, 84, 100–110. [Google Scholar] [CrossRef]
- Anandakumar, H.; Umamaheswari, K. An Efficient Optimized Handover in Cognitive Radio Networks Using Cooperative Spectrum Sensing. Intell. Autom. Soft Comput. 2017, 1–8. [Google Scholar] [CrossRef]
- Corral-De-Witt, D.; Younan, A.; Fatima, A.; Matamoros, J.; Awin, F.A.; Tepe, K.; Abdel-Raheem, E. Sensing TV Spectrum Using Software Defined Radio Hardware. In Proceedings of the 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–4. [Google Scholar]
- Awin, F.; Younan, A.; Corral-De-Witt, D.; Tepe, K.; Abdel-Raheem, E. Real-Time Multi-Channel TVWS Sensing Prototype Using Software Defined Radio. In Proceedings of the 2018 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Louisville, KY, USA, 6–8 December 2018; pp. 235–240. [Google Scholar]
- Corral-De-Witt, D.; Ahmed, S.; Awin, F.; Rojo-Álvarez, J.L.; Tepe, K. An Accurate Probabilistic Model for TVWS Identification. Appl. Sci. 2019, 9, 4232. [Google Scholar] [CrossRef] [Green Version]
- Politis, C.; Maleki, S.; Duncan, J.M.; Krivochiza, J.; Chatzinotas, S.; Ottesten, B. SDR Implementation of a Testbed for Real-Time Interference Detection With Signal Cancellation. IEEE Access 2018, 6, 20807–20821. [Google Scholar] [CrossRef]
- Djamal, T.; Azzaz, M.S.; Sadoudi, S. Analysis Study and SDR Implementation of GoF Based Spectrum Sensing for Cognitive Radio. IET Commun. 2020. [Google Scholar] [CrossRef]
- Hiari, O.; Mesleh, R. A Reconfigurable SDR Transmitter Platform Architecture for Space Modulation MIMO Techniques. IEEE Access 2017, 5, 24214–24228. [Google Scholar] [CrossRef]
- Soltani, S.; Sagduyu, Y.; Shi, Y.; Li, J.; Feldman, J.; Matyjas, J. Distributed Cognitive Radio Network Architecture, SDR Implementation and Emulation Testbed. In Proceedings of the MILCOM 2015—2015 IEEE Military Communications Conference, Tampa, FL, USA, 26–28 October 2015; pp. 438–443. [Google Scholar]
- Nastase, C.-V.; Martian, A.; Vladeanu, C.; Marghescu, I. Spectrum Sensing Based on Energy Detection Algorithms Using GNU Radio and USRP for Cognitive Radio. In Proceedings of the 2018 International Conference on Communications (COMM), Bucharest, Romania, 14–16 June 2018; pp. 381–384. [Google Scholar]
- Chamran, M.K.; Yau, K.-L.A.; Noor, R.M.D.; Wong, R. A Distributed Testbed for 5G Scenarios: An Experimental Study. Sensors 2019, 20, 18. [Google Scholar] [CrossRef] [Green Version]
- Sharma, N.; Rawat, D.B.; Bista, B.B.; Shetty, S. A Testbed Using USRP(TM) and LabView(R) for Dynamic Spectrum Access in Cognitive Radio Networks. In Proceedings of the 2015 IEEE 29th International Conference on Advanced Information Networking and Applications, Gwangiu, Korea, 24–27 March 2015; pp. 735–740. [Google Scholar]
- Santos-Luna, E.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R.; Ramos, V.; Lopez-Benitez, M.; Cardenas-Juarez, M. A Spectrum Analyzer Based on a Low-Cost Hardware-Software Integration. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0607–0612. [Google Scholar]
- Brand, E.R. A National Instruments USRP Software Defined Radio (SDR) Online Catalog. Available online: https://www.ettus.com/products/ (accessed on 11 March 2021).
- LimeSDR Mini Is a $135 Open Source Hardware, Full Duplex USB SDR Board (Crowdfunding). Available online: https://www.cnx-software.com/2017/09/18/limesdr-mini-is-a-135-open-source-hardware-full-duplex-usb-sdr-board-crowdfunding/ (accessed on 21 August 2020).
- Selva, A.F.B.; Reis, A.L.G.; Lenzi, K.G.; Meloni, L.G.P.; Barbin, S.E. Introduction to the Software-defined Radio Approach. IEEE Lat. Am. Trans. 2012, 10, 6. [Google Scholar]
- Daneshgaran, F.; Laddomada, M. Transceiver front-end technology for software radio implementation of wideband satellite communication systems. Wirel. Pers. Commun. 2003, 24, 99–121. [Google Scholar] [CrossRef]
- Ulversoy, T. Software Defined Radio: Challenges and Opportunities. IEEE Commun. Surv. Tutor. 2010, 12, 531–550. [Google Scholar] [CrossRef] [Green Version]
- Stewart, R.W.; Crockett, L.; Atkinson, D.; Barlee, K.; Crawford, D.; Chalmers, I.; Mclernon, M.; Sozer, E. A Low-Cost Desktop Software Defined Radio Design Environment Using MATLAB, Simulink, and the RTL-SDR. IEEE Commun. Mag. 2015, 53, 64–71. [Google Scholar] [CrossRef] [Green Version]
- Nooelec—Nooelec NESDR SMArt v4 SDR—Premium RTL-SDR w/Aluminum Enclosure, 0.5PPM TCXO, SMA Input. RTL2832U & R820T2-Based—Software Defined Radio. Available online: https://www.nooelec.com/store/sdr/nesdr-smart-sdr.html (accessed on 8 March 2021).
- HackRF. One—Great Scott Gadgets. Available online: https://greatscottgadgets.com/hackrf/one/ (accessed on 8 March 2021).
- LimeSDR Mini. Available online: https://limemicro.com/products/boards/limesdr-mini/ (accessed on 8 March 2021).
- Kay, S.M. Modern Spectral Estimation: Theory and Application; Prentice-Hall Signal Processing Series; Prentice Hall: Englewood Cliffs, NJ, USA, 1988; ISBN 978-0-13-598582-3. [Google Scholar]
- Welch, P. The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging over Short, Modified Periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Yang, F.; Ding, W.; Song, J.; Han, Z. Impulsive Noise Cancellation for MIMO-OFDM PLC Systems: A Structured Compressed Sensing Perspective. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Ram, R.; Panda, S.; Palo, H.K.; Mohanty, M.N. Impulsive Noise Cancellation for Speech Enhancement Using State Space Adaptive Algorithm. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Paralakhemundi, India, 3–5 October 2016; pp. 1393–1396. [Google Scholar]
- Cuadro Nacional de Atribución de Frecuencias (CNAF)|Cuadro Nacional de Atribución de Frecuencias (CNAF)—IFT. Available online: http://cnaf.ift.org.mx/ (accessed on 25 March 2019).
- Urkowitz, H. Energy Detection of Unknown Deterministic Signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | HackRF One | RTL-SDR | LimeSDR Mini |
|---|---|---|---|
| Frequency range | 1 MHz–6 GHz | 22 MHz–2.2 GHz | 10 MHz–3.5 GHz |
| RF bandwidth | 20 MHz | 3.2 MHz | 30.72 MHz |
| Sample depth | 8 bit | 8 bit | 12 bit |
| Sample rate | 20 MSPS | 3.2 MSPS | 30.72 MSPS |
| Tx channels | 1 | 0 | 1 |
| Rx channels | 1 | 1 | 1 |
| Duplex | Half | - | Full |
| Transmit power | −10 dBm + (15 dBm @ 2.4 GHz) | - | Max 10 dBm (depending on frequency) |
| Tx/Rx | SU1 | SU2 | SU3 | PU1 | PU2 |
|---|---|---|---|---|---|
| Device | HackRF One | RTL-SDR 0005 | RTL-SDR 0002 | LimeSDR Mini | Cell phone call |
| Tx Frequency (MHz) | - | - | - | 847.8 | 842.5 |
| Type of transmission | - | - | - | OFDM | CDMA [43] |
| Tx Bandwidth (MHz) | - | - | - | 1 | 5 |
| Rx Frequency (MHz) | 835 | 846.2 | 848.6 | - | - |
| Rx Bandwidth (MHz) | 20 | 2.4 | 2.4 | - | - |
| SU1 | SU2 | SU3 | |
|---|---|---|---|
| Device | HackRF One | RTL-SDR 0005 | RTL-SDR 0002 |
| SNR values | −5, −4, −2, −1, 0, 1, 2, 3, 4, 5, 6, 8, 10, 12, 14, 16, 18, and 20 dB | ||
| Rx frames per SNR value | 10,000 | 10,000 | 10,000 |
| Samples per frame | 2048 | 1024 | 1024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molina-Tenorio, Y.; Prieto-Guerrero, A.; Aguilar-Gonzalez, R. Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology. Sensors 2021, 21, 3506. https://doi.org/10.3390/s21103506
Molina-Tenorio Y, Prieto-Guerrero A, Aguilar-Gonzalez R. Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology. Sensors. 2021; 21(10):3506. https://doi.org/10.3390/s21103506
Chicago/Turabian StyleMolina-Tenorio, Yanqueleth, Alfonso Prieto-Guerrero, and Rafael Aguilar-Gonzalez. 2021. "Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology" Sensors 21, no. 10: 3506. https://doi.org/10.3390/s21103506
APA StyleMolina-Tenorio, Y., Prieto-Guerrero, A., & Aguilar-Gonzalez, R. (2021). Real-Time Implementation of Multiband Spectrum Sensing Using SDR Technology. Sensors, 21(10), 3506. https://doi.org/10.3390/s21103506