
Patient Specific Numerical Modeling for Renal Blood Monitoring Using Electrical Bio-Impedance

Abstract
:1. Introduction
2. Materials and Methods
3. Results
3.1. Simulation and Experimental Results
3.2. Verification with Doppler Ultrasound
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Regan, M.C.; Young, L.S.; Geraghty, J.; Fitzpatrick, J.M. Regional renal blood flow in normal and disease states. Urol. Res. 1995, 23, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Kalantarinia, K.; Belcik, J.T.; Patrie, J.T.; Wei, K. Real-time measurement of renal blood flow in healthy subjects using contrast-enhanced ultrasound. Am. J. Physiol. Renal Physiol. 2009, 297, 1129–1134. [Google Scholar] [CrossRef] [PubMed]
- Thölking, G.; Schuette-Nuetgen, K.; Kentrup, D.; Pawelski, H.; Reuter, S. Imaging-based diagnosis of acute renal allograft rejection. World J. Transplant. 2016, 6, 174–182. [Google Scholar] [CrossRef] [Green Version]
- Ruf, B.; Bonelli, V.; Balling, G.; Hörer, J.; Nagdyman, N.; Braun, S.L.; Ewert, P.; Reiter, K. Intraoperative renal near-infrared spectroscopy indicates developing acute kidney injury in infants undergoing cardiac surgery with cardiopulmonary bypass: A case–control study. Crit. Care 2015, 19, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bogonez, P.; Riu, P.J. Implantable bioimpedance system for measuring the impedance of kidney. In Proceedings of the 13th International Conference on Electrical Bioimpedance and the 8th Conference on Electrical Impedance Tomography, Graz, Austria, 29 August–2 September 2007; Springer: Graz, Austria, 2007; pp. 256–259. [Google Scholar]
- Hanssen, O.; Erpicium, P.; Lovinfosse, P.; Meunier, P.; Weekers, L.; Tshibanda, L.; Krzesinski, J.M.; Hustinx, R.; Jouret, F. Non-invasive approaches in the diagnosis of acute rejection in kidney transplant recipients. Part I. In vivo imaging methods. Clin. Kidney J. 2017, 10, 97–105. [Google Scholar] [PubMed] [Green Version]
- Rodriguez, S.; Ollmar, S.; Waqar, M.; Rusu, A. A Batteryless Sensor ASIC for Implantable Bio-Impedance Applications. IEEE Trans. Biomed. Circuits Syst. 2016, 10, 533–544. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lopez-Gomez, J.M. Evolution and applications of bioimpedance in managing chronic kidney disease. Nefrologia 2011, 31, 630–634. [Google Scholar] [PubMed]
- Al-harosh, M.; Yangirov, M.; Kolesnikov, D.; Shchukin, S. Bio-Impedance Sensor for Real-Time Artery Diameter Waveform Assessment. Sensors 2021, 21, 8438. [Google Scholar] [CrossRef] [PubMed]
- Al-Harosh, M.B.; Chernikov, E.S.; Shchukin, S.I.; Gries, T.; Leonhardt, S. Renal Blood Monitoring System Using Bio-impedance Measurement: Pilot Study. In Proceedings of the 2021 IEEE Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 13–14 May 2020; pp. 199–202. [Google Scholar]
- Gabriel, C.; Gabriel, S.; Corthout, E. The dielectric properties of biological tissues: I. Literature survey. Phys. Med. Biol. 1996, 41, 2231–2249. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-harosh, M.B.; Shchukin, S. Peripheral vein detection using electrical impedance method. J. Electr. Bioimpedance 2017, 8, 79–83. [Google Scholar] [CrossRef] [Green Version]
- Dokos, S. Modelling Organs, Tissues, Cells and Devices: Using Matlab and Comsol Multiphysics; Springer: Berlin/Heidelberg, Germany, 2017; pp. 355–379. [Google Scholar]
- Tikhomirov, A.N.; Briko, A.N.; Seleznev, N.V.; Shchukin, S.I.; Levando, A.M.; Murashko, M.A. Development of a Geometric Model of the Heart and Chest for Multichannel Electrical Impedance Computer Cardiography Technology. In Proceedings of the 2020 IEEE Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 13–14 May 2020; pp. 32–35. [Google Scholar]
- Tikhomirov, A.N.; Shchukin, S.I.; Leonhardt, S.; Volkov, A.K.; Murashko, M.A. Multichannel Electrical Impedance Methods for Monitoring Cardiac Activity Indicators. Biomed. Eng. 2019, 52, 365–370. [Google Scholar] [CrossRef]
- MicroDicom—Free DICOM Viewer and Software. Available online: http://www.microdicom.com/ (accessed on 28 October 2021).
- Tagawa, T.; Tamura, T.; Oberg, P.A. Biomedical Sensors and Instruments; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Schmidt-Nielsen, B.; Schmidt, D. Renal function of Sphenodon punctatum. Comp. Biochem. Physiol. Part A Physiol. 1973, 44, 121–129. [Google Scholar] [CrossRef]
- Al-Harosh, M.B.; Shchukin, S.I. The Venous Occlusion Effect to Increase the Accuracy of Electrical Impedance Peripheral Veins Detection. In Proceedings of the 2017 Joint Conference of the European Medical and Biological Engineering Conference (EMBEC) and the Nordic-Baltic Conference on Biomedical Engineering and Medical Physics (NBC), Tampere, Finland, 11–15 June 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 538–541. [Google Scholar]
- Al-Harosh, M.B.; Shchukin, S.I. Numerical modeling of the electrical impedance method of peripheral veins localization. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering, Toronto, ON, Canada, 7–12 June 2015; Springer: Cham, Switzerland, 2015; pp. 1683–1686. [Google Scholar]
- Goidina, T.; Kobelev, A.; Gulyaev, Y. Precision Electrode System for Electrical Impedance Myography. In Proceedings of the 2021 IEEE Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 13–14 May 2020; pp. 143–146. [Google Scholar]
- Siva, S.; Pham, D.; Gill, S.; Bressel, M.; Dang, K.; Devereux, T. An analysis of respiratory induced kidney motion on four-dimensional computed tomography and its implications for stereotactic kidney radiotherapy. Radiat. Oncol. 2013, 8, 1–8. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
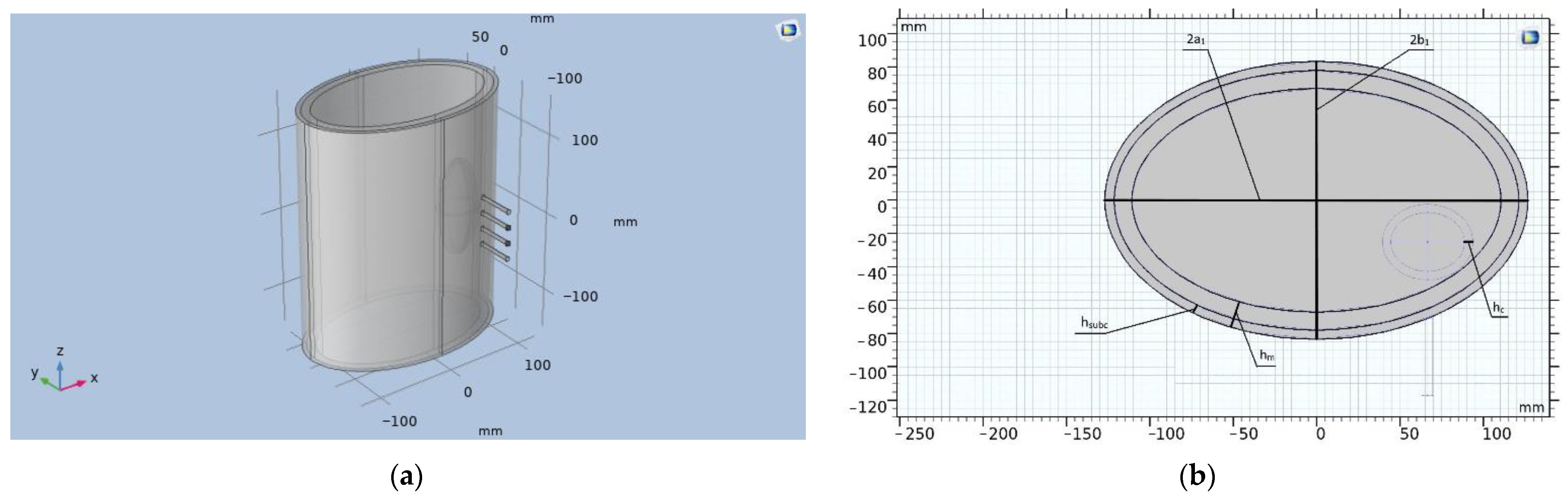
| Model Parameters | Value [mm] |
|---|---|
| 2a1 | 253.7 |
| 2b1 | 166.71 |
| hsubc | 5.54 |
| hm | 10.74 |
| hc | 5 |
| Cases | Electrical Resistivity ρ [Ω·m] |
|---|---|
| Before blood-filling (cortex) | 5.84 |
| Before blood-filling (medulla) | 5.84 |
| After blood-filling (90–10%, cortex) | 4.99 |
| After blood-filling (90–10%, medulla) | 5.75 |
| After blood-filling (70–30%, cortex) | 5.18 |
| After blood-filling (70–30%, medulla) | 5.56 |
| Specification | Range |
|---|---|
| Channels number | 32 |
| the current | 3 mA |
| the sampling frequency | 500 Hz |
| frequency band | 0.01–137 Hz |
| the measuring range value | 1–250 Ω |
| ADC | 12 bit |
| Calibration | integrated |
| The accuracy of pulsatile impedance | 1.0 mΩ |
| The accuracy of static impedance | 50 mΩ |
| The Electrode System | 2a [mm] | 2b [mm] |
|---|---|---|
| 1st | 30 | 10 |
| 2nd | 45 | 15 |
| 3rd | 60 | 20 |
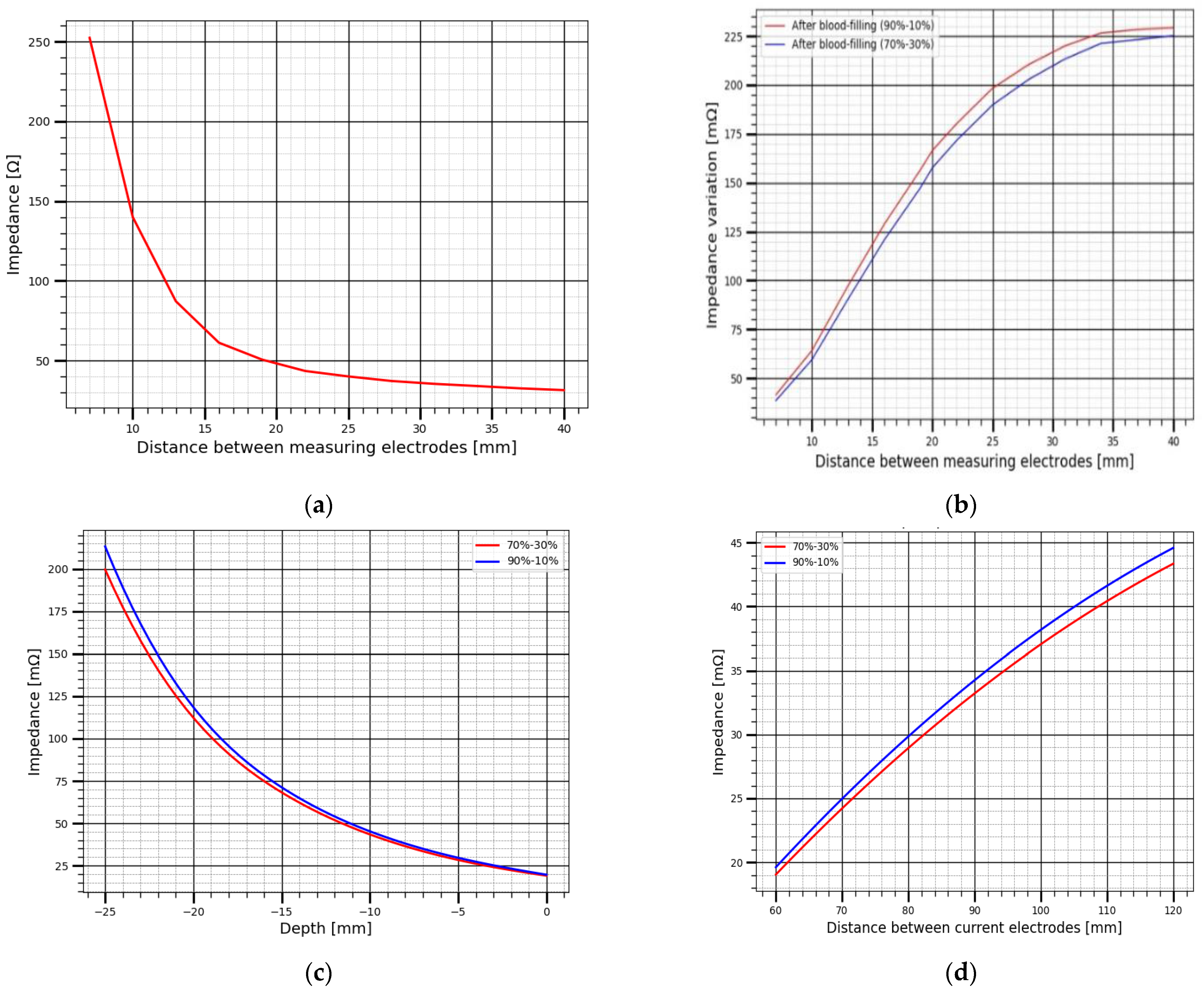
| Distance between Measuring Electrodes [mm] | Before [Ω] | After (90–10%) [Ω] | After (70–30%) [Ω] |
|---|---|---|---|
| 7 | 394.707 | 394.665 | 394.669 |
| 10 | 199.349 | 199.284 | 199.289 |
| 13 | 111.898 | 111.801 | 111.808 |
| 16 | 70.642 | 70.513 | 70.521 |
| 19 | 55.924 | 55.768 | 55.777 |
| 22 | 46.879 | 46.699 | 52.492 |
| 25 | 43.224 | 43.026 | 43.034 |
| 28 | 40.481 | 40.271 | 40.278 |
| 31 | 38.891 | 38.671 | 38.678 |
| 34 | 37.802 | 37.576 | 37.581 |
| 37 | 36.589 | 36.361 | 36.366 |
| 40 | 35.729 | 35.499 | 35.503 |
| Distance between the Current Electrodes [mm] | Base Impedance [Ω] | dZ [mΩ] |
|---|---|---|
| 30 | 95.002 | 32.94 |
| 45 | 69.448 | 43.18 |
| 60 | 47.257 | 53.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-harosh, M.; Chernikov, E.; Shchukin, S. Patient Specific Numerical Modeling for Renal Blood Monitoring Using Electrical Bio-Impedance. Sensors 2022, 22, 606. https://doi.org/10.3390/s22020606
Al-harosh M, Chernikov E, Shchukin S. Patient Specific Numerical Modeling for Renal Blood Monitoring Using Electrical Bio-Impedance. Sensors. 2022; 22(2):606. https://doi.org/10.3390/s22020606
Chicago/Turabian StyleAl-harosh, Mugeb, Egor Chernikov, and Sergey Shchukin. 2022. "Patient Specific Numerical Modeling for Renal Blood Monitoring Using Electrical Bio-Impedance" Sensors 22, no. 2: 606. https://doi.org/10.3390/s22020606
APA StyleAl-harosh, M., Chernikov, E., & Shchukin, S. (2022). Patient Specific Numerical Modeling for Renal Blood Monitoring Using Electrical Bio-Impedance. Sensors, 22(2), 606. https://doi.org/10.3390/s22020606