
TrackInk: An IoT-Enabled Real-Time Object Tracking System in Space

 ,
,  ,
,  , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We propose a real-time, portable, cost-effective, and highly efficient object tracking framework that is able to detect objects in space with high accuracy.
- We detail the system design and provide a complete implementation of the proposed framework with a hardware-based practical test-bed setup.
- We examine the performance of the proposed framework using a practical use-case example.
2. Related Work
3. Proposed Framework
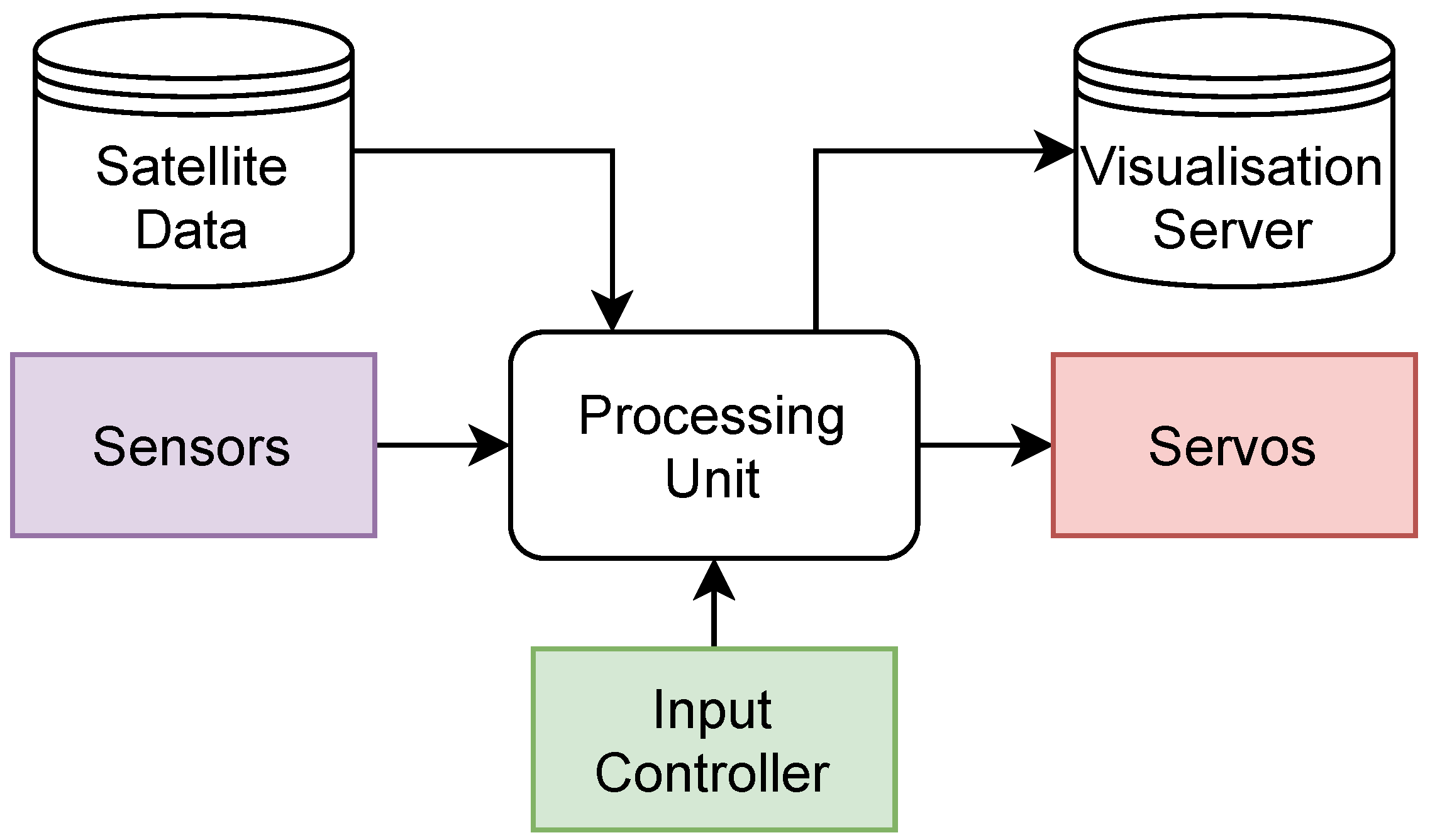
3.1. Components
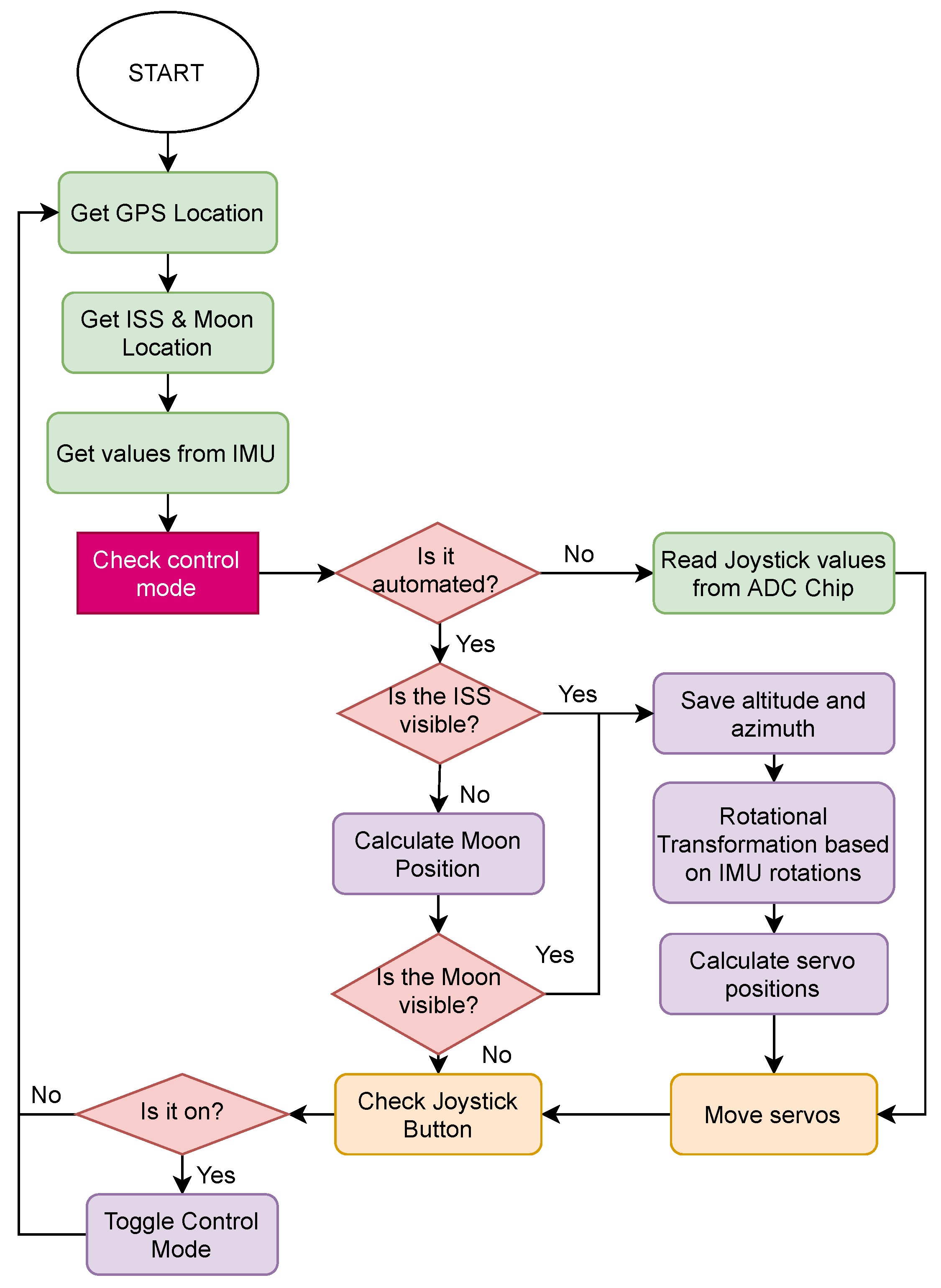
3.2. System Functionality
4. System Development and Evaluation
4.1. Implementation
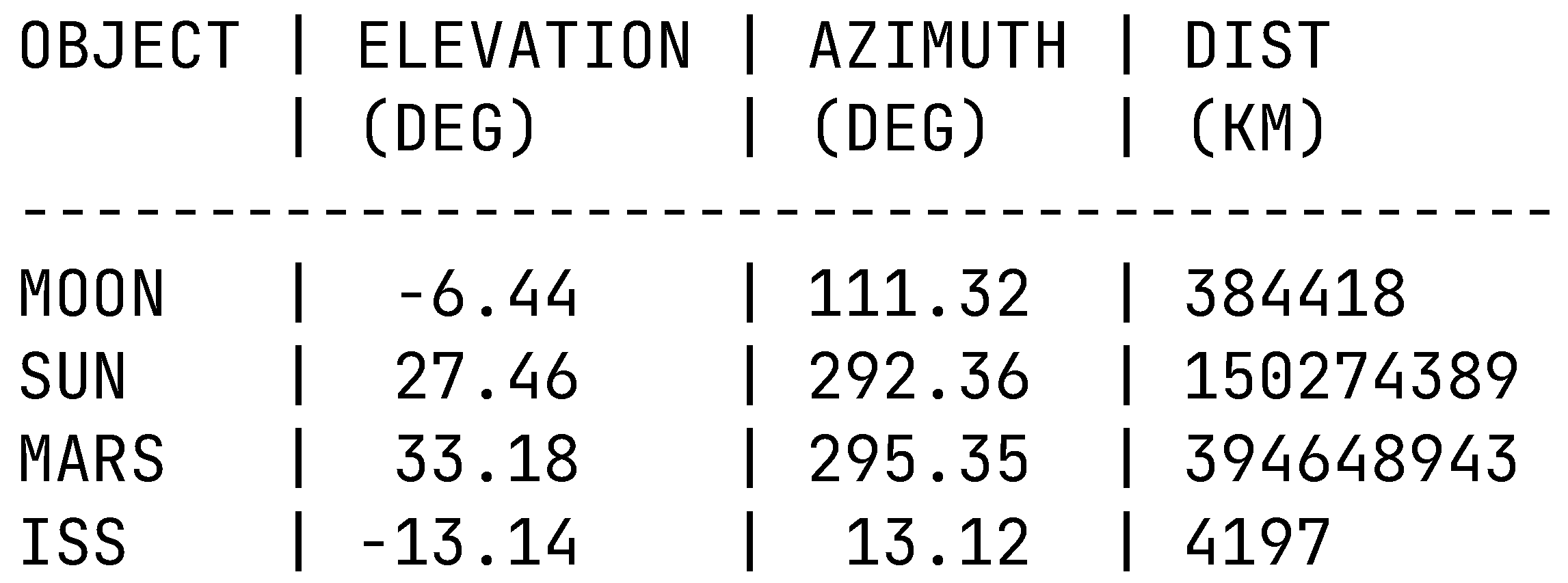
4.2. Results
5. Lessons Learned and Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Asadi, A.; Wang, Q.; Mancuso, V. A survey on device-to-device communication in cellular networks. IEEE Commun. Surv. Tutor. 2014, 16, 1801–1819. [Google Scholar] [CrossRef] [Green Version]
- Rabehaja, T.; Pal, S.; Hitchens, M. Design and implementation of a secure and flexible access-right delegation for resource constrained environments. Future Gener. Comput. Syst. 2019, 99, 593–608. [Google Scholar] [CrossRef]
- Pal, S.; Hitchens, M.; Varadharajan, V.; Rabehaja, T. Policy-based access control for constrained healthcare resources in the context of the Internet of Things. J. Netw. Comput. Appl. 2019, 139, 57–74. [Google Scholar] [CrossRef]
- Pal, S.; Hitchens, M.; Varadharajan, V.; Rabehaja, T. Fine-grained access control for smart healthcare systems in the Internet of Things. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2018, 4, e5. [Google Scholar] [CrossRef] [Green Version]
- Elgamoudi, A.; Benzerrouk, H.; Elango, G.A.; Landry, R. A Survey for Recent Techniques and Algorithms of Geolocation and Target Tracking in Wireless and Satellite Systems. Appl. Sci. 2021, 11, 6079. [Google Scholar] [CrossRef]
- Pal, S.; Hitchens, M.; Varadharajan, V.; Rabehaja, T. On design of a fine-grained access control architecture for securing iot-enabled smart healthcare systems. In Proceedings of the 14th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Melbourne, Australia, 7–10 November 2017; pp. 432–441. [Google Scholar]
- Pal, S.; Hitchens, M.; Varadharajan, V. Modeling identity for the internet of things: Survey, classification and trends. In Proceedings of the 2018 12th International Conference on Sensing Technology (ICST), Limerick, Ireland, 4–6 December 2018; pp. 45–51. [Google Scholar]
- Priya Dharshini, K.; Gopalakrishnan, D.; Shankar, C.; Ramya, R. A Survey on IoT Applications in Smart Cities. In Immersive Technology in Smart Cities; Springer: Cham, Switzerland, 2022; pp. 179–204. [Google Scholar]
- Shilpa, B.; Radha, R.; Movva, P. Comparative Analysis of Wireless Communication Technologies for IoT Applications. In Artificial Intelligence and Technologies; Springer: Cham, Switzerland, 2022; pp. 383–394. [Google Scholar]
- Pal, S.; Hitchens, M.; Varadharajan, V. Towards a secure access control architecture for the Internet of Things. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks (LCN), Singapore, 9–12 October 2017; pp. 219–222. [Google Scholar]
- Pal, S. Extending Mobile Cloud Platforms Using Opportunistic Networks: Survey, Classification and Open Issues. J. Univers. Comput. Sci. 2015, 21, 1594–1634. [Google Scholar]
- GPS.gov: Space Segment. Available online: https://www.gps.gov/systems/gps/space/ (accessed on 15 September 2021).
- Dai, C.; Zheng, G.; Chen, Q. Satellite constellation design with multi-objective genetic algorithm for regional terrestrial satellite network. China Commun. 2018, 15, 1–10. [Google Scholar] [CrossRef]
- Deng, R.; Di, B.; Zhang, H.; Song, L. Ultra-Dense LEO Satellite Constellation Design for Global Coverage in Terrestrial-Satellite Networks. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Dai, C.Q.; Zhang, M.; Li, C.; Zhao, J.; Chen, Q. QoE-Aware Intelligent Satellite Constellation Design in Satellite Internet of Things. IEEE Internet Things J. 2021, 8, 4855–4867. [Google Scholar] [CrossRef]
- Duan, T.; Dinavahi, V. Starlink Space Network-Enhanced Cyber—Physical Power System. IEEE Trans. Smart Grid 2021, 12, 3673–3675. [Google Scholar] [CrossRef]
- Wei, J.; Cao, S. Application of edge intelligent computing in satellite Internet of Things. In Proceedings of the 2019 IEEE International Conference on Smart Internet of Things (SmartIoT), Tianjin, China, 9–11 August 2019; pp. 85–91. [Google Scholar]
- Shukla, B.P.; Kishtawal, C.M.; Pal, P.K. Prediction of Satellite Image Sequence for Weather Nowcasting Using Cluster-Based Spatiotemporal Regression. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4155–4160. [Google Scholar] [CrossRef]
- Cui, Y.; Li, S.; Wang, L.; Sha, M.; Shu, Y. Disaster event management based on Integrated Disaster Reduction and rapid Service Platform. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 649–652. [Google Scholar] [CrossRef]
- Bowman, M.C.; Foster, K.; Wilkerson, M. An evaluation of potential natural disaster response using the National Polar-orbiting Operational Environmental Satellite System (NPOESS). In Proceedings of the 2009 17th International Conference on Geoinformatics, Fairfax, VA, USA, 12–14 August 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Boori, M.S.; Choudhary, K.; Paringer, R.; Sharma, A.K.; Kupriyanov, A.; Corgne, S. Monitoring Crop Phenology Using NDVI Time Series from Sentinel 2 Satellite Data. In Proceedings of the 2019 5th International Conference on Frontiers of Signal Processing (ICFSP), Marseille, France, 18–20 September 2019; pp. 62–66. [Google Scholar] [CrossRef]
- Pal, S. Internet of Things and Access Control: Sensing, Monitoring and Controlling Access in IoT-Enabled Healthcare Systems; Springer: Cham, Switzerland, 2021; Volume 37. [Google Scholar]
- Sharma, M.; Singla, M.K.; Nijhawan, P.; Ganguli, S.; Rajest, S.S. An Application of IoT to Develop Concept of Smart Remote Monitoring System. In Business Intelligence for Enterprise Internet of Things; Springer: Cham, Switzerland, 2020; pp. 233–239. [Google Scholar]
- Mohapatra, D.; Subudhi, B. Development of a Cost Effective IoT-based Weather Monitoring System. IEEE Consum. Electron. Mag. 2022. [Google Scholar] [CrossRef]
- Pal, S.; Moreira, W. Extending cloud-based applications with mobile opportunistic networks: Security issues and privacy challenges. In Pervasive Computing: Next Generation Platforms for Intelligent Data Collection; Academic Press: London, UK, 2016; pp. 445–481. [Google Scholar]
- Pal, S.; Hitchens, M.; Varadharajan, V. IoT for wearable devices: Access control and identity management. In Wearable Sensors: Applications, Design and Implementation; IOP Publishing: Bristol, UK, 2017; pp. 1–29. [Google Scholar]
- Pal, S. Limitations and Approaches in Access Control and Identity Management for Constrained IoT Resources. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 431–432. [Google Scholar]
- CelesTrak: Current NORAD Two-Line Element Sets. Available online: https://celestrak.com/NORAD/elements/ (accessed on 11 July 2021).
- Jameel, F.; Hamid, Z.; Jabeen, F.; Zeadally, S.; Javed, M.A. A Survey of Device-to-Device Communications: Research Issues and Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 2133–2168. [Google Scholar] [CrossRef]
- Pal, S. Information Sharing and Communications with Mobile Cloud Technology: Applications and Challenges. In Handbook of Research on Mobile Devices and Applications in Higher Education Settings; IGI Global: Hershey, PA, USA, 2016; pp. 53–71. [Google Scholar]
- Gupta, P.; Alam, M.; Neha. Challenges in the Adaptation of IoT Technology. In A Fusion of Artificial Intelligence and Internet of Things for Emerging Cyber Systems; Springer: Cham, Switzerland, 2022; pp. 347–369. [Google Scholar]
- Afzal, B.; Umair, M.; Shah, G.A.; Ahmed, E. Enabling IoT platforms for social IoT applications: Vision, feature mapping, and challenges. Future Gener. Comput. Syst. 2019, 92, 718–731. [Google Scholar] [CrossRef]
- Pal, S. Evaluating the impact of network loads and message size on mobile opportunistic networks in challenged environments. J. Netw. Comput. Appl. 2017, 81, 47–58. [Google Scholar] [CrossRef]
- Pal, S.; Hitchens, M.; Varadharajan, V. Towards the design of a trust management framework for the Internet of Things. In Proceedings of the 2019 13th International Conference on Sensing Technology (ICST), Sydney, NSW, Australia, 2–4 December 2019; pp. 1–7. [Google Scholar]
- Javed, F.; Afzal, M.K.; Sharif, M.; Kim, B.S. Internet of Things (IoT) operating systems support, networking technologies, applications, and challenges: A comparative review. IEEE Commun. Surv. Tutor. 2018, 20, 2062–2100. [Google Scholar] [CrossRef]
- Pal, S.; Hitchens, M.; Varadharajan, V. Access control for Internet of Things—Enabled assistive technologies: An architecture, challenges and requirements. In Assistive Technology for the Elderly; Elsevier: Frisco, CO, USA, 2020; pp. 1–43. [Google Scholar]
- Pal, S.; Hitchens, M.; Varadharajan, V. On the design of security mechanisms for the Internet of Things. In Proceedings of the 2017 Eleventh International Conference on Sensing Technology (ICST), Sydney, NSW, Australia, 4–6 December 2017; pp. 1–6. [Google Scholar]
- Chatterjee, U.; Ray, S. Security Issues on IoT Communication and Evolving Solutions. In Soft Computing in Interdisciplinary Sciences; Springer: Cham, Switzerland, 2022; pp. 183–204. [Google Scholar]
- Tournier, J.; Lesueur, F.; Le Mouël, F.; Guyon, L.; Ben-Hassine, H. A survey of IoT protocols and their security issues through the lens of a generic IoT stack. Internet Things 2021, 16, 100264. [Google Scholar] [CrossRef]
- Pal, S.; Hitchens, M.; Rabehaja, T.; Mukhopadhyay, S. Security requirements for the internet of things: A systematic approach. Sensors 2020, 20, 5897. [Google Scholar] [CrossRef] [PubMed]
- HaddadPajouh, H.; Dehghantanha, A.; Parizi, R.M.; Aledhari, M.; Karimipour, H. A survey on internet of things security: Requirements, challenges, and solutions. Internet Things 2021, 14, 100129. [Google Scholar]
- Oyshi, M.T.; Bonny, M.Z.; Saha, S.; Tumpa, Z.N. IoT Security Issues and Possible Solution Using Blockchain Technology. In Advances in Distributed Computing and Machine Learning; Springer: Cham, Switzerland, 2021; pp. 113–121. [Google Scholar]
- Pal, S.; Rabehaja, T.; Hill, A.; Hitchens, M.; Varadharajan, V. On the integration of blockchain to the internet of things for enabling access right delegation. IEEE Internet Things J. 2019, 7, 2630–2639. [Google Scholar] [CrossRef]
- Pal, S.; Rabehaja, T.; Hitchens, M.; Varadharajan, V.; Hill, A. On the design of a flexible delegation model for the Internet of Things using blockchain. IEEE Trans. Ind. Inform. 2019, 16, 3521–3530. [Google Scholar]
- Witrisal, K.; Anton-Haro, C.; Grebien, S.; Joseph, W.; Leitinger, E.; Li, X.; Del Peral-Rosado, J.A.; Plets, D.; Vilà-Valls, J.; Wilding, T. Localization and tracking. In Inclusive Radio Communications for 5G and Beyond; Elsevier: Amsterdam, The Netherlands, 2021; pp. 253–293. [Google Scholar]
- Pal, S.; Jadidi, Z. Analysis of Security Issues and Countermeasures for the Industrial Internet of Things. Appl. Sci. 2021, 11, 9393. [Google Scholar] [CrossRef]
- Zhao, Z.; Lin, P.; Shen, L.; Zhang, M.; Huang, G.Q. IoT edge computing-enabled collaborative tracking system for manufacturing resources in industrial park. Adv. Eng. Inform. 2020, 43, 101044. [Google Scholar] [CrossRef]
- Pal, S.; Jadidi, Z. Protocol-Based and Hybrid Access Control for the IoT: Approaches and Research Opportunities. Sensors 2021, 21, 6832. [Google Scholar] [CrossRef] [PubMed]
- Fang, G.; Yi, J.; Wan, X.; Liu, Y.; Ke, H. Experimental Research of Multistatic Passive Radar With a Single Antenna for Drone Detection. IEEE Access 2018, 6, 33542–33551. [Google Scholar] [CrossRef]
- Veremyev, V.I.; Vorobev, E.N.; Kokorina, Y.V. Feasibility Study of Air Target Detection by Passive Radar Using Satellite-based Transmitters. In Proceedings of the 2019 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Saint Petersburg/Moscow, Russia, 28–31 January 2019; pp. 154–157. [Google Scholar] [CrossRef]
- Sosnowski, T.; Bieszczad, G.; Madura, H.; Kastek, M. Thermovision system for flying objects detection. In Proceedings of the 2018 Baltic URSI Symposium (URSI), Poznan, Poland, 14–17 May 2018; pp. 141–144. [Google Scholar] [CrossRef]
- Pandey, S.; Sharma, R.; Singh, G. Implementation of 5-Block Convolutional Neural Network (CNN) for Saliency Improvement on Flying Object Detection in Videos. In Proceedings of the 2020 3rd International Conference on Emerging Technologies in Computer Engineering: Machine Learning and Internet of Things (ICETCE), Jaipur, India, 7–8 February 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Mordecai, Y.; Dori, D. Agile modeling of an evolving ballistic missile defense system with Object-Process Methodology. In Proceedings of the 2015 Annual IEEE Systems Conference (SysCon) Proceedings, Vancouver, BC, Canada, 13–16 April 2015; pp. 839–846. [Google Scholar] [CrossRef]
- Vallathan, G.; John, A.; Thirumalai, C.; Mohan, S.; Srivastava, G.; Lin, J.C.W. Suspicious activity detection using deep learning in secure assisted living IoT environments. J. Supercomput. 2021, 77, 3242–3260. [Google Scholar] [CrossRef]
- Balamurugan, N.; Mohan, S.; Adimoolam, M.; John, A.; Wang, W. DOA tracking for seamless connectivity in beamformed IoT-based drones. Comput. Stand. Interfaces 2022, 79, 103564. [Google Scholar] [CrossRef]
- Chen, L.; Thombre, S.; Järvinen, K.; Lohan, E.S.; Alén-Savikko, A.; Leppäkoski, H.; Bhuiyan, M.Z.H.; Bu-Pasha, S.; Ferrara, G.N.; Honkala, S.; et al. Robustness, security and privacy in location-based services for future IoT: A survey. IEEE Access 2017, 5, 8956–8977. [Google Scholar] [CrossRef]
- Asaduzzaman, M.; Geok, T.K.; Sayeed, S.; Bari, M.A.; Hossain, F.; Peng, T.C. A Comparative Survey on Indoor Object Location Tracking Techniques and Technologies. In Proceedings of the 2020 IEEE 10th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 9 November 2020; pp. 79–84. [Google Scholar]
- Mieczkowska, D.; Wójcicki, J.; Szewczak, P.; Kubel-Grabau, M.; Zaborowska, M.; Zielińska, U.; Kopyciński, J.; Woźniak, P.; Borucka, A.; Moryc, G.; et al. Detection of objects on LEO using signals of opportunity. In Proceedings of the 2017 Signal Processing Symposium (SPSympo), Jachranka Village, Poland, 12–14 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zuehlke, D.; Henderson, T.; Alan Lovell, T.; Sizemore, A. An End-to-End Process for Local Space Situational Awareness from Optical Observers. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1547–1555. [Google Scholar] [CrossRef]
- Riesing, K.; Yoon, H.; Cahoy, K. A portable optical ground station for low-earth orbit satellite communications. In Proceedings of the 2017 IEEE International Conference on Space Optical Systems and Applications (ICSOS), Naha, Japan, 14–16 November 2017; pp. 108–114. [Google Scholar] [CrossRef]
- Haq, S.U.; Sarosh, A.; Nayyer, M.; Shah, S.I.A. Integration of small telescopes with satellite tracking analytical model for space situational awareness (SSA). In Proceedings of the 2017 Fifth International Conference on Aerospace Science Engineering (ICASE), Islamabad, Pakistan, 14–16 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Aydın, S.; Güzenge, Ç.; Kaya, A.; Kayhan, Ö.; Kovan, E.C.; Yurtçu, M.K.; Akbulut, B. Tracking of low earth orbit satellites by optical systems. In Proceedings of the 2015 7th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 16–19 June 2015; pp. 175–180. [Google Scholar] [CrossRef]
- Kubo-oka, T.; Kunimori, H.; Fuse, T.; Toyoshima, M. Coarse pointing of optical ground station toward geosynchronous optical communication satellite by use of video tracking sub-scope. In Proceedings of the 2017 IEEE International Conference on Space Optical Systems and Applications (ICSOS), Naha, Japan, 14–16 November 2017; pp. 188–192. [Google Scholar] [CrossRef]
- Hafizoglu, F.M.; Mailler, R. Decentralized Telescope Management for Satellite Tracking. In Proceedings of the 2013 IEEE/WIC/ACM International Joint Conferences on Web Intelligence (WI) and Intelligent Agent Technologies (IAT), Atlanta, GA, USA, 17–20 November 2013; Volume 2, pp. 383–390. [Google Scholar] [CrossRef]
- Gürol, B.; Gülgönül, Ş.; Gökay, G.; Okan, A.; Öz, I. Optical monitoring of inter satellite distance between Turksat-2A And Turksat-3A. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST2011, Istanbul, Turkey, 9–11 June 2011; pp. 337–340. [Google Scholar] [CrossRef]
- Raspberry Pi 4 Model B Specifications—Raspberry Pi. Available online: https://www.raspberrypi.org/products/raspberry-pi-4-model-b/specifications/ (accessed on 13 September 2021).
- GitHub Codes. Available online: https://github.com/aume1/SatelliteTracker (accessed on 10 August 2021).
- GPS Sentences | NMEA Sentences | GPGGA GPGLL GPVTG GPRMC. Available online: https://www.rfwireless-world.com/Terminology/GPS-sentences-or-NMEA-sentences.html (accessed on 12 June 2021).
- GrovePi. Available online: https://github.com/DexterInd/GrovePi/blob/master/Software/Python/grove_gps/GroveGPS.py (accessed on 14 May 2021).
- Gruber, D. The mathematics of the 3D rotation matrix. In Proceedings of the Xtreme Game Developers Conference, Santa Clara, CA, USA, 30 September–1 October 2000; pp. 1–14. [Google Scholar]
- ISS Sightings over Your City | Spot The Station | NASA. Available online: https://spotthestation.nasa.gov/sightings/index.cfm (accessed on 18 September 2021).
- Orbit Tutorial | Gateway to Astronaut Photography of Earth. Available online: https://eol.jsc.nasa.gov/Tools/orbitTutorial.htm (accessed on 13 August 2021).
- Zhang, P.; Gu, J.; Milios, E.; Huynh, P. Navigation with IMU/GPS/digital compass with unscented Kalman filter. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 3, pp. 1497–1502. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aume, C.; Andrews, K.; Pal, S.; James, A.; Seth, A.; Mukhopadhyay, S. TrackInk: An IoT-Enabled Real-Time Object Tracking System in Space. Sensors 2022, 22, 608. https://doi.org/10.3390/s22020608
Aume C, Andrews K, Pal S, James A, Seth A, Mukhopadhyay S. TrackInk: An IoT-Enabled Real-Time Object Tracking System in Space. Sensors. 2022; 22(2):608. https://doi.org/10.3390/s22020608
Chicago/Turabian StyleAume, Cameron, Keith Andrews, Shantanu Pal, Alice James, Avishkar Seth, and Subhas Mukhopadhyay. 2022. "TrackInk: An IoT-Enabled Real-Time Object Tracking System in Space" Sensors 22, no. 2: 608. https://doi.org/10.3390/s22020608
APA StyleAume, C., Andrews, K., Pal, S., James, A., Seth, A., & Mukhopadhyay, S. (2022). TrackInk: An IoT-Enabled Real-Time Object Tracking System in Space. Sensors, 22(2), 608. https://doi.org/10.3390/s22020608