Deformation of Composite Laminates Induced by Surface Bonded and Embedded Piezoelectric Actuators

Abstract
:1. Introduction
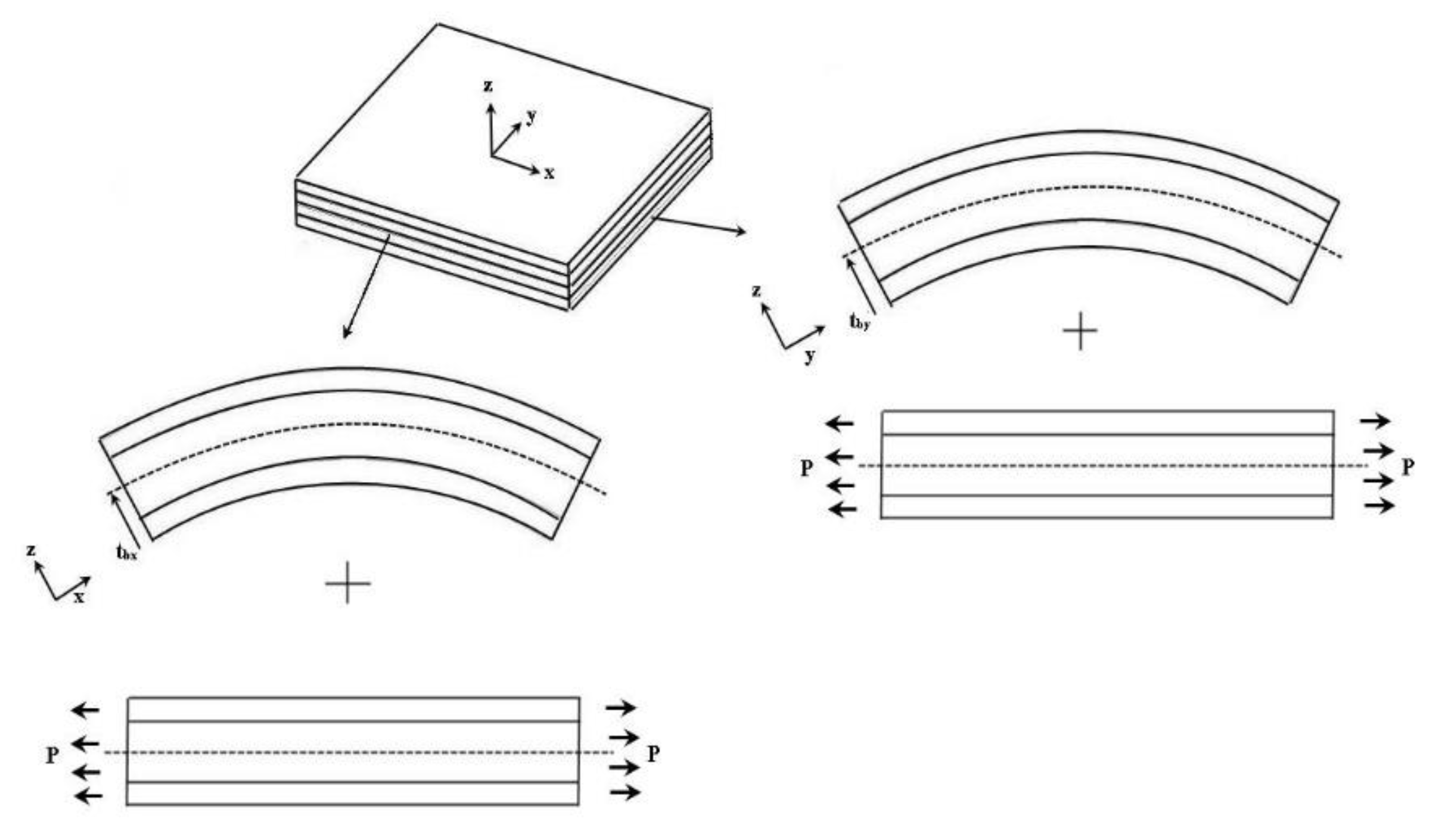
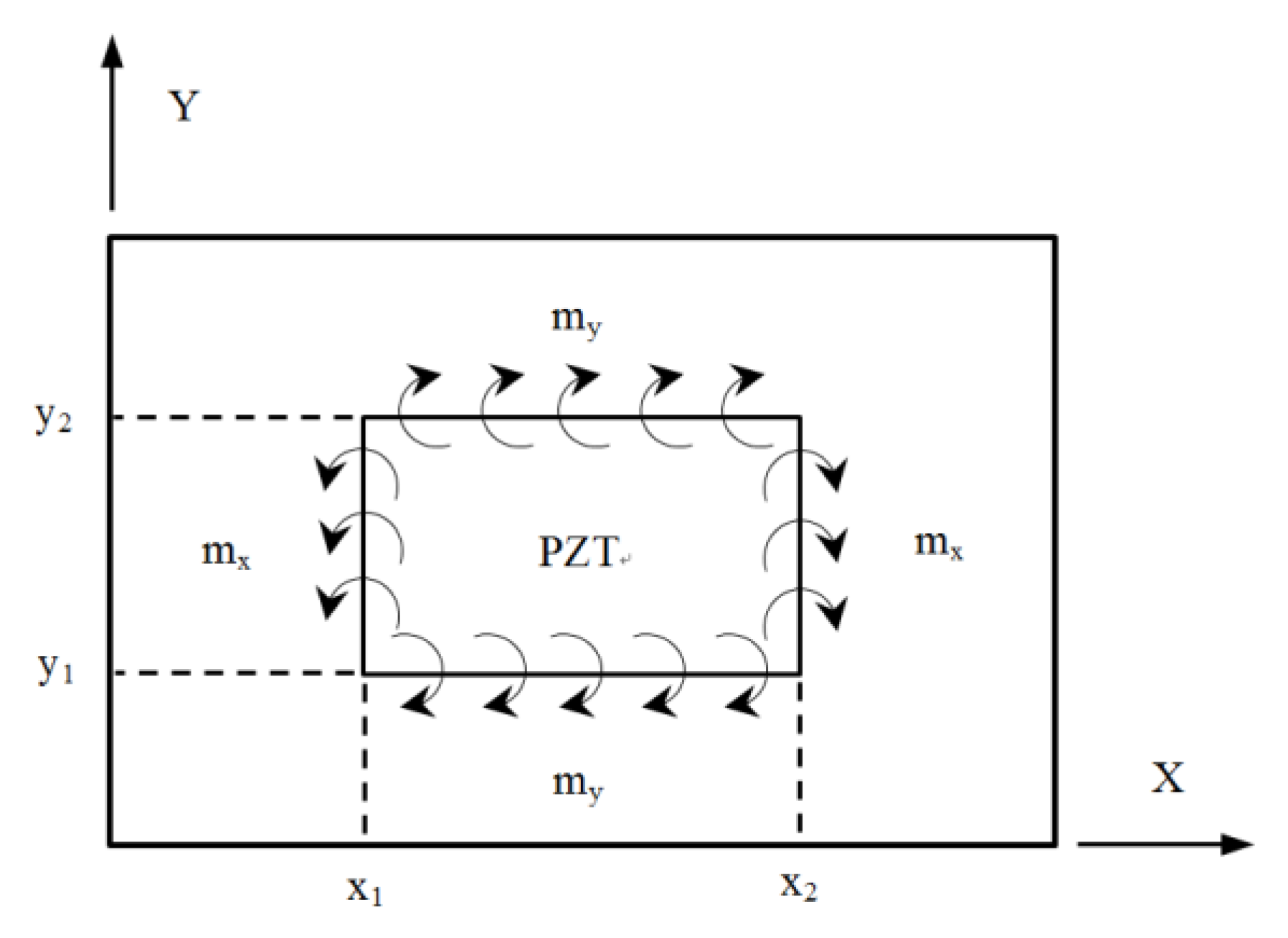
2. Bending Moments Induced by PZT Actuator
3. Deflection of A Simply Supported Cross Ply Composite Laminate Plate
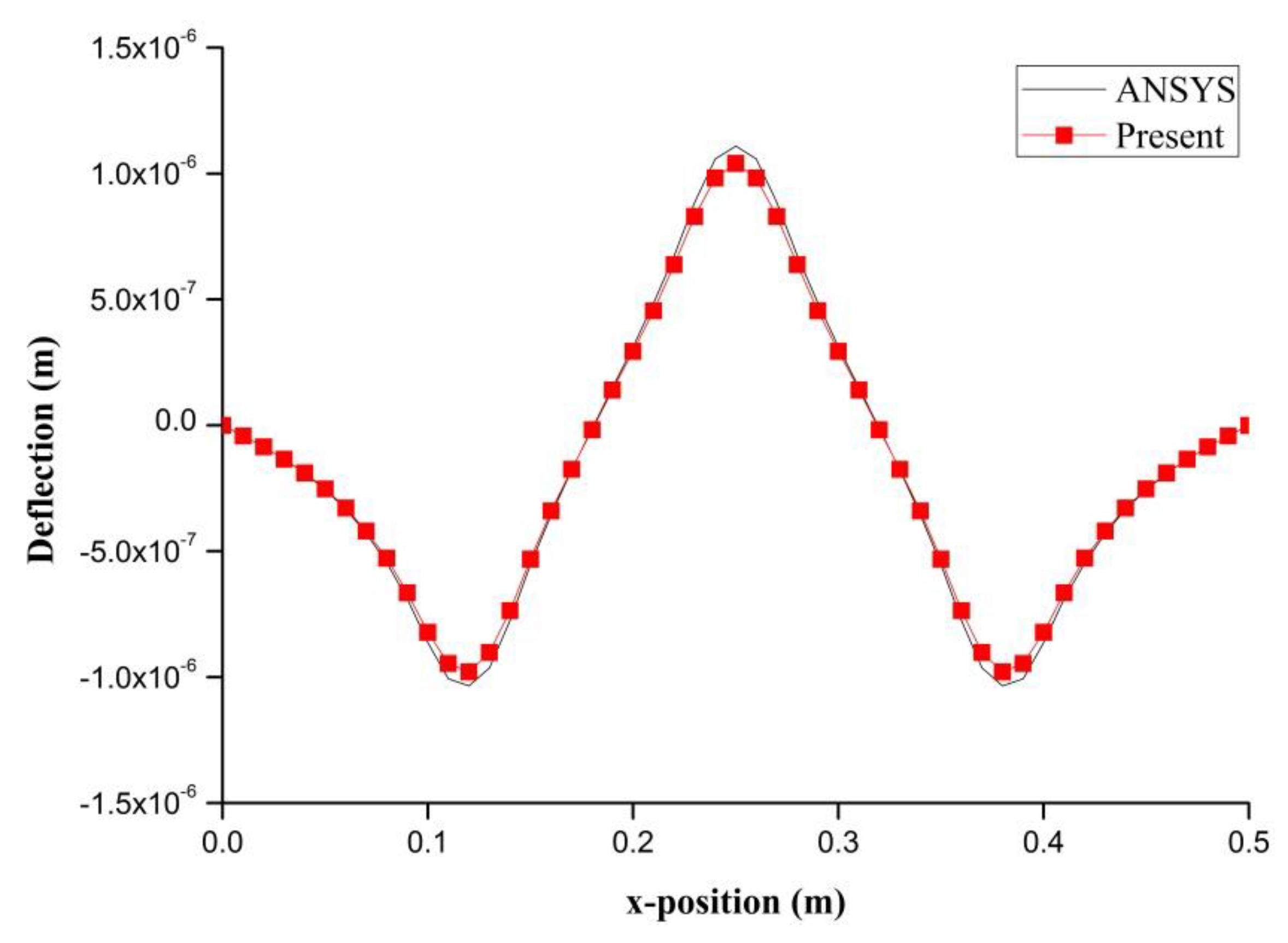
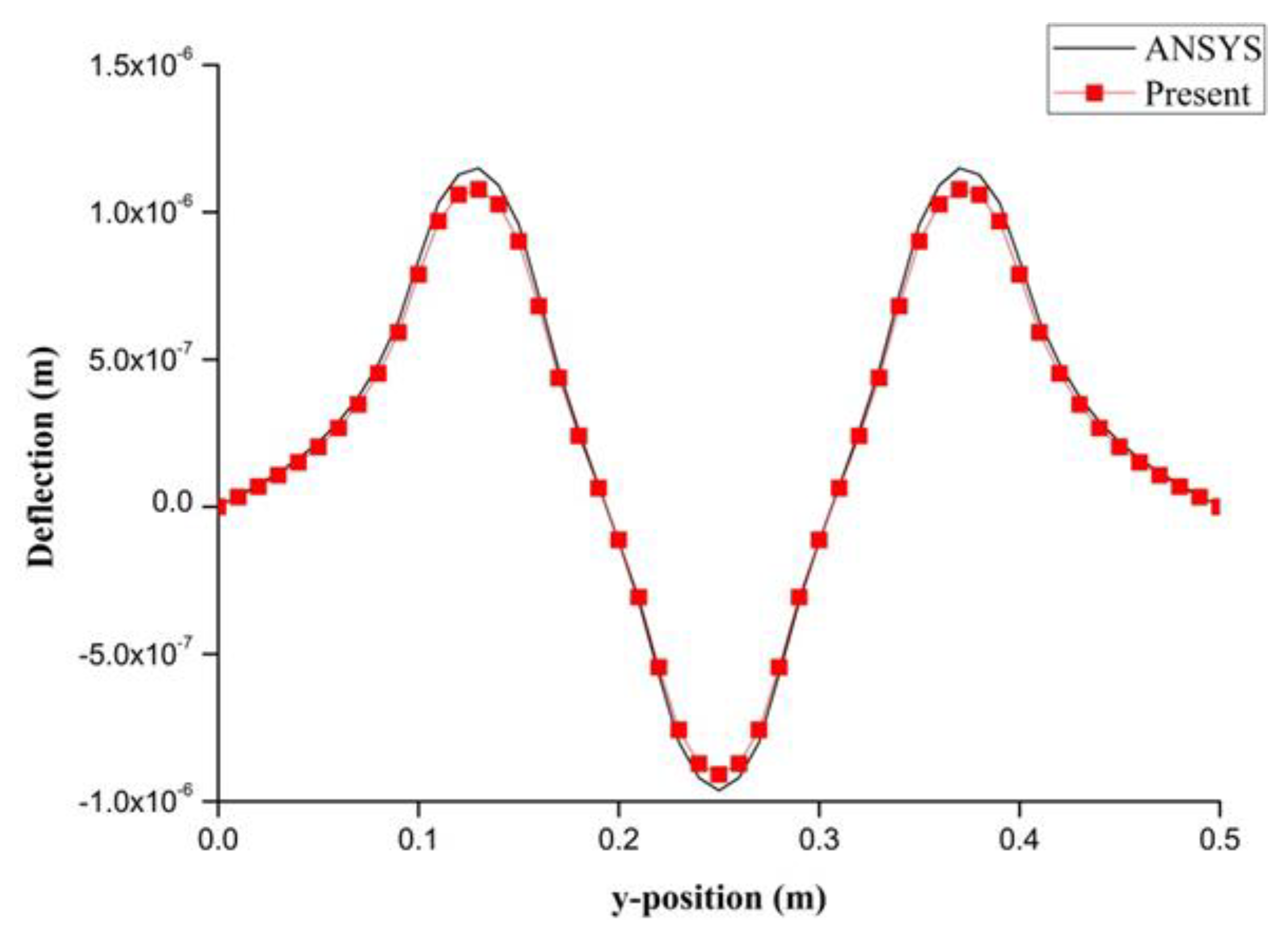
4. Parametric Studies and Verification
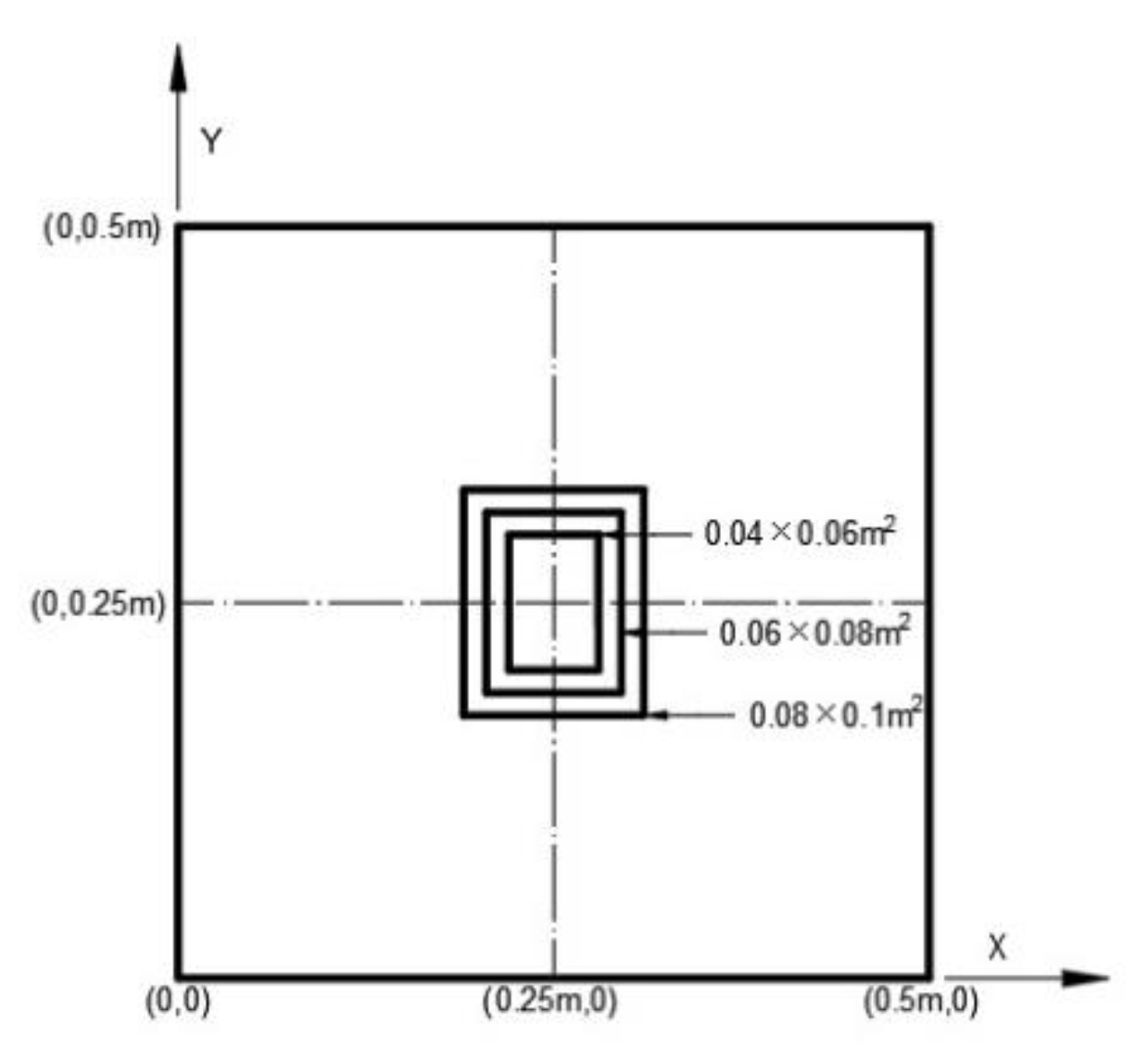
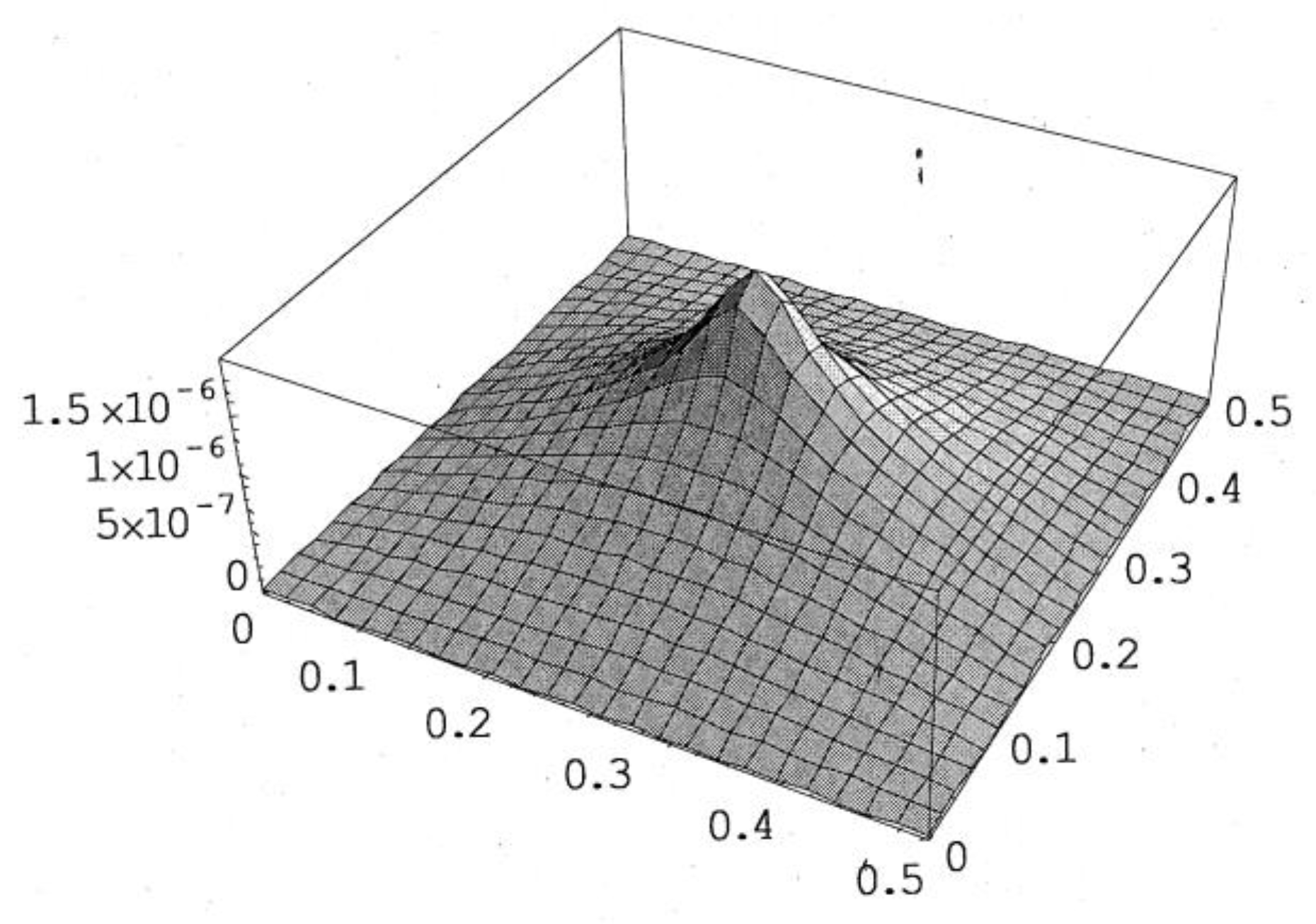
4.1. The Effect of PZT Size
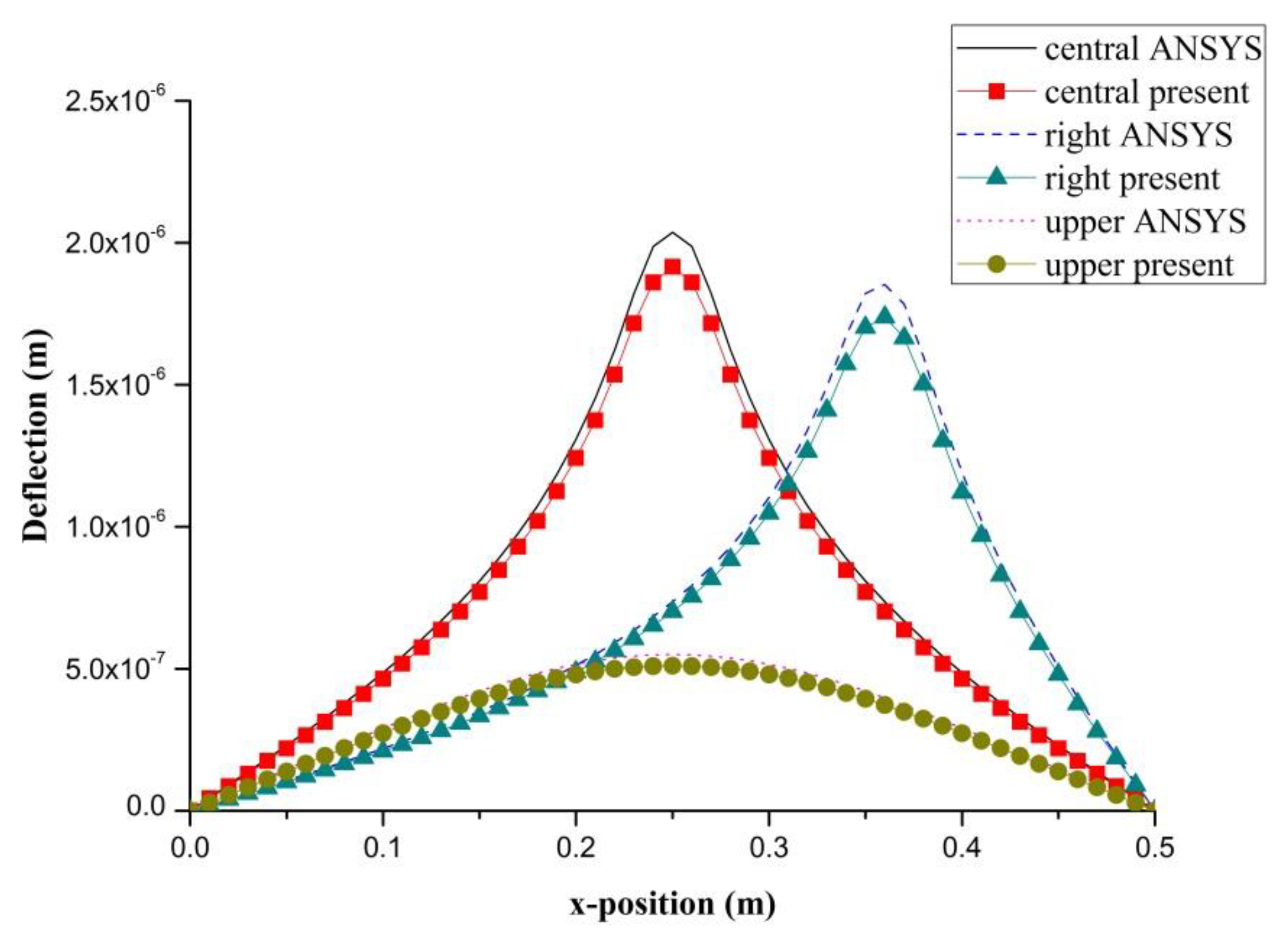
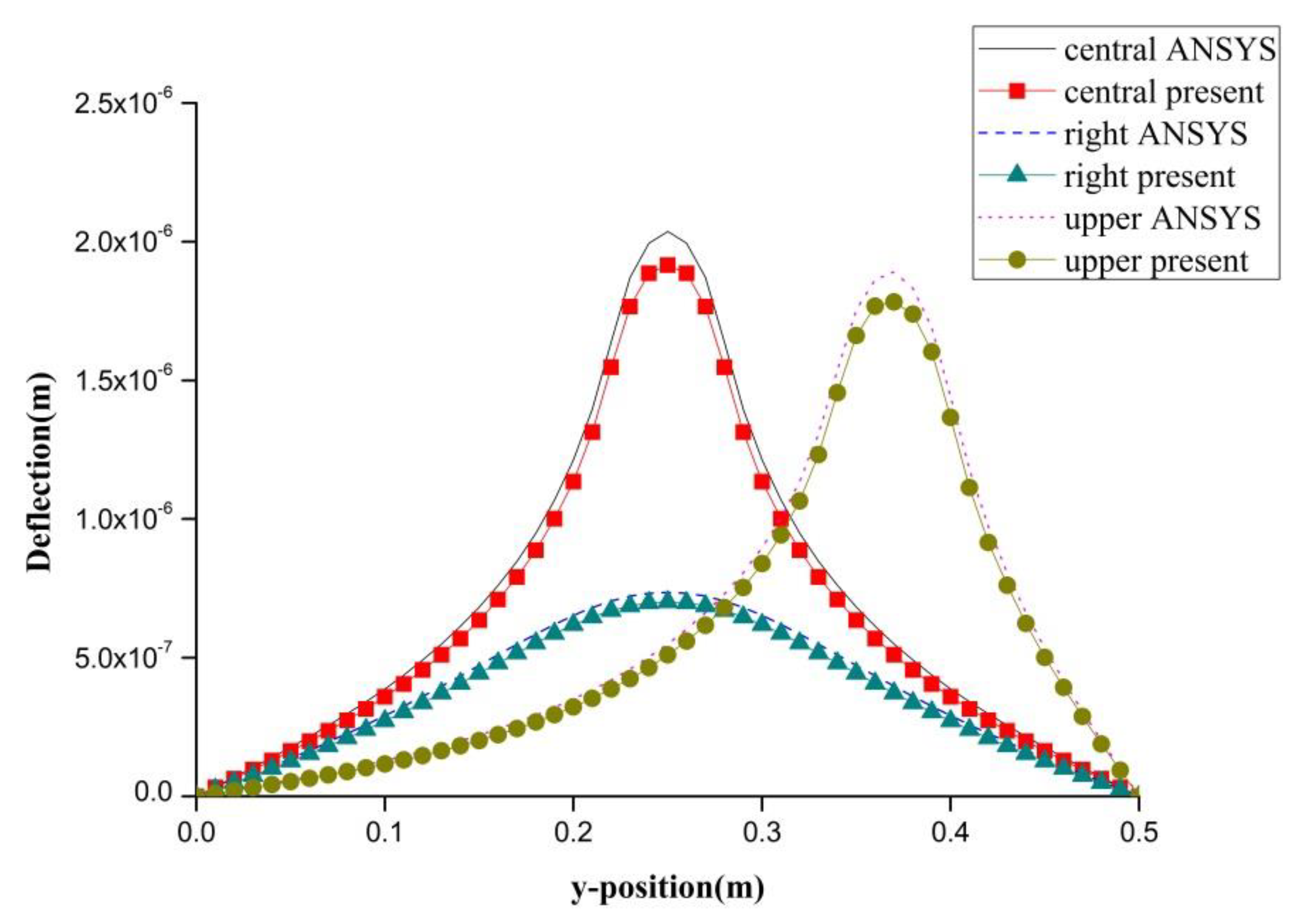
4.2. The Effect of PZT Location
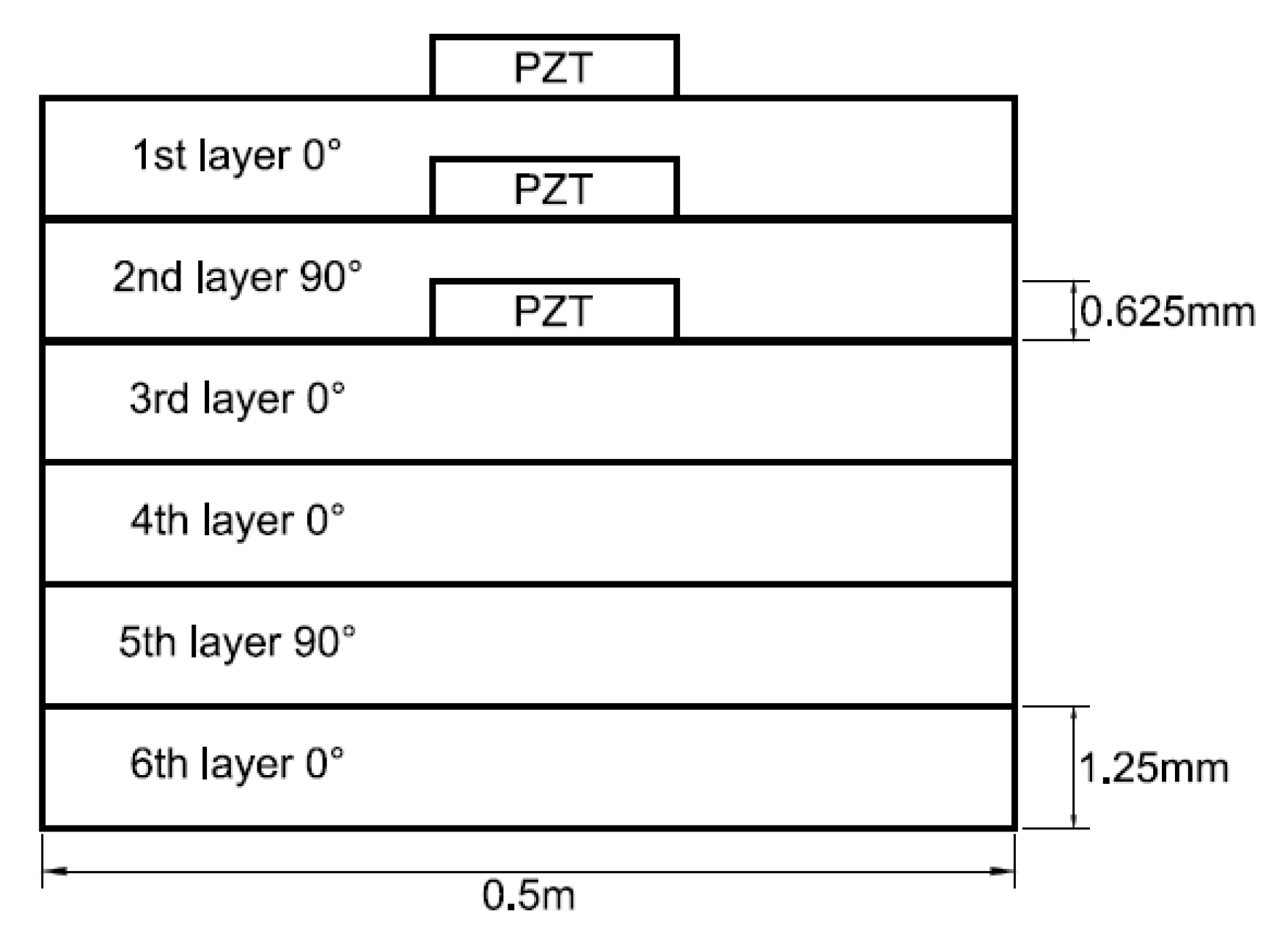
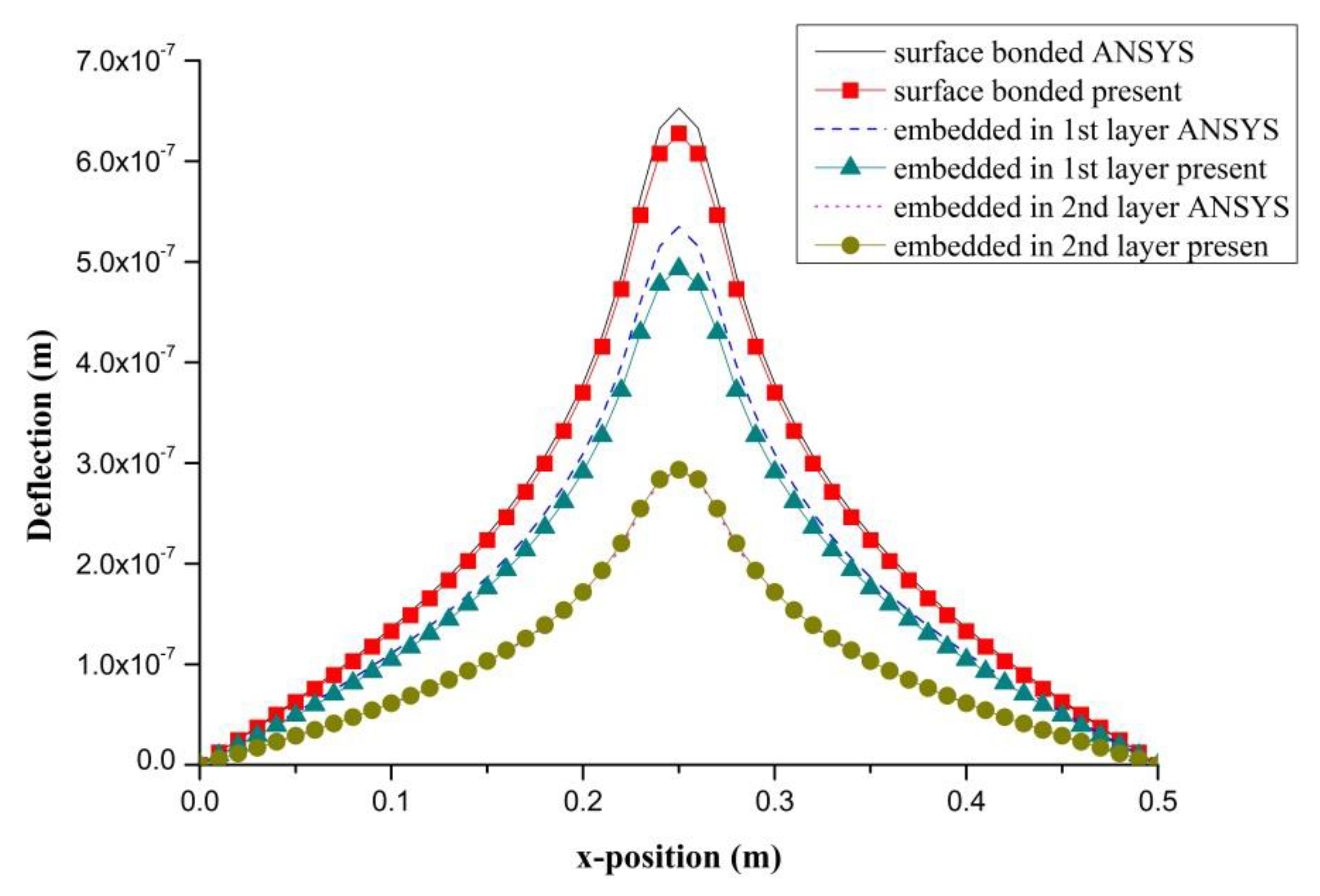
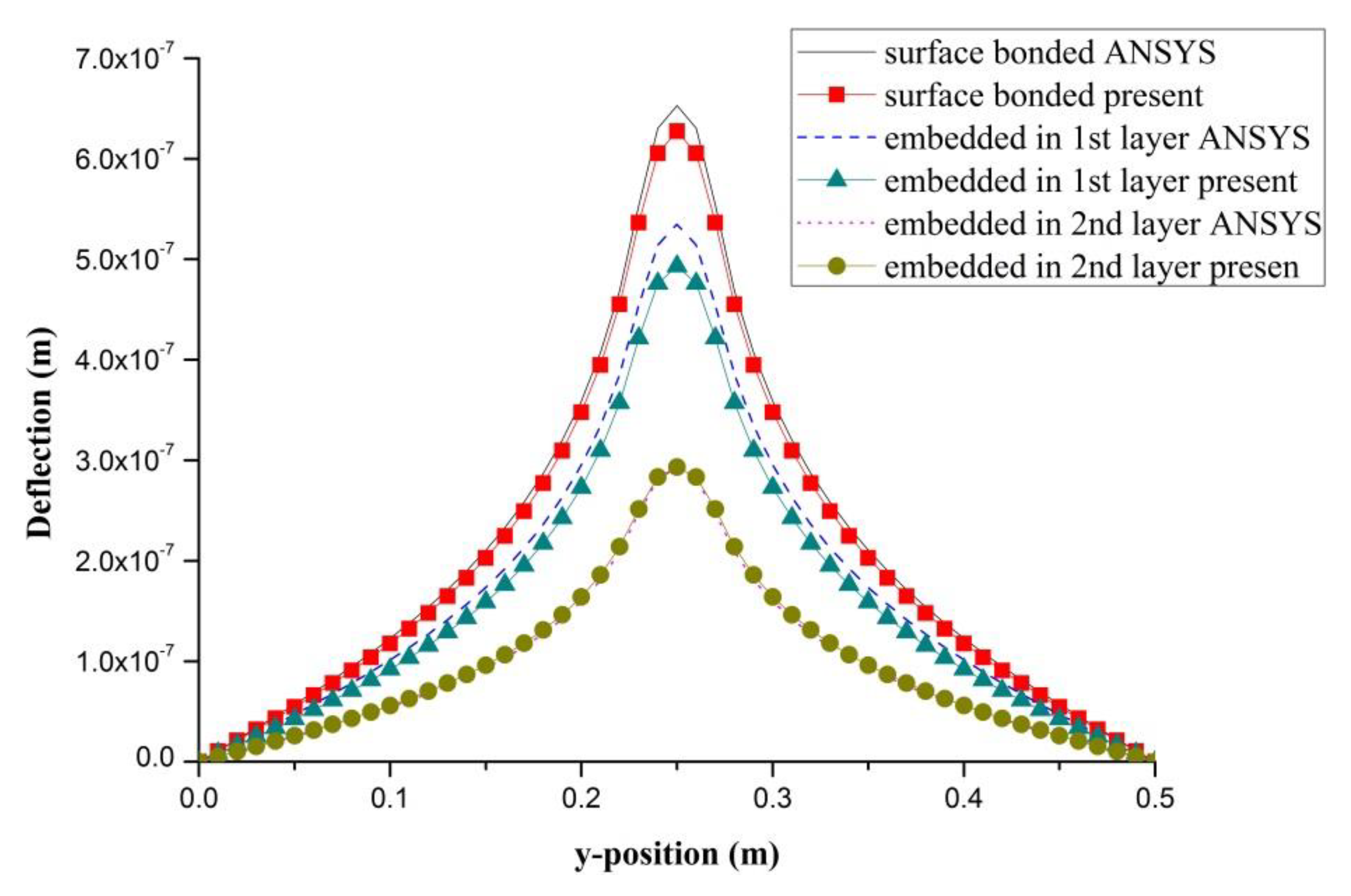
4.3. The effect of PZT Embedded Depth
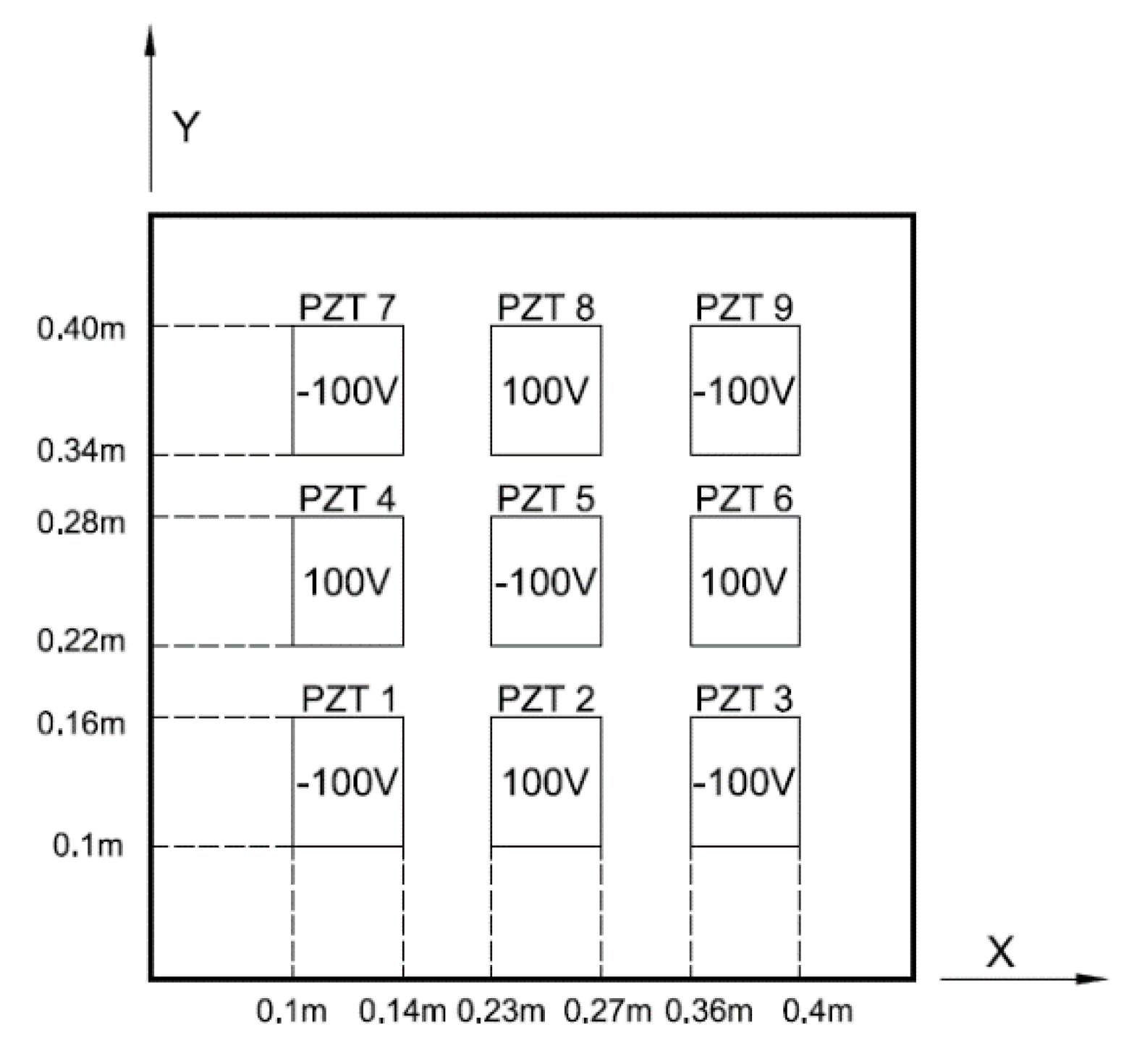
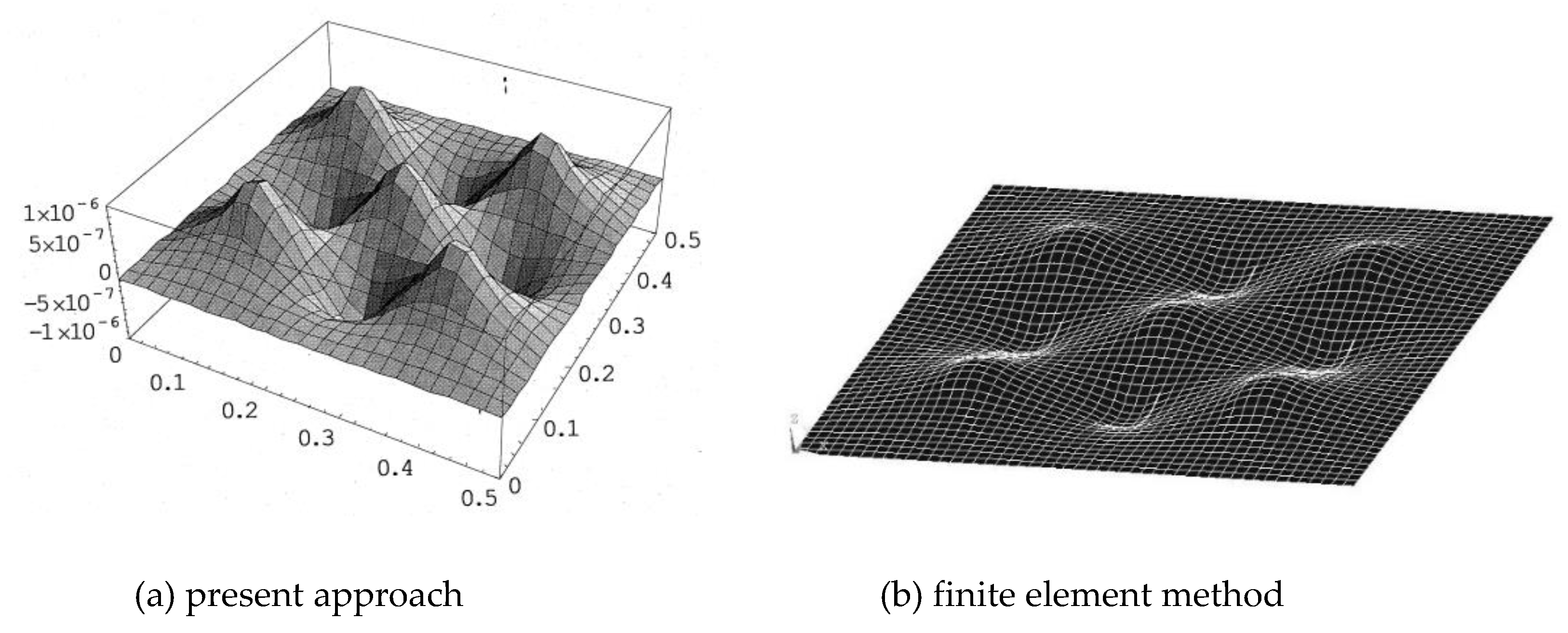
4.4. Distributed PZT Actuators
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Izadi, M.; Tahani, M. Analysis of interlaminar stresses in general cross-ply laminates with distributed piezoelectric actuators. Compos. Struct. 2010, 92, 757–768. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Zhu, Y.C.; Li, R.Q.; Liu, C.; Bruno, N. Development of a dual magnetostrictive material rods based electro-hydrostatic actuator. J. Intell. Mater. Syst. Struct. 2019, 30, 1871–1881. [Google Scholar] [CrossRef]
- Kondoh, Y. Actuators making use of electroheological fluids: Movable electrode-type ER Actuators. J. Intell. Mater. Syst. Struct. 2000, 10, 718–722. [Google Scholar] [CrossRef]
- Villoslada, A.; Flores-Caballero, A.; Copaci, D.; Blanco, D.; Moreno, L. High-displacement flexible shape memory alloy actuator for soft wearable robots. Robot. Auton. Syst. 2015, 73, 91–101. [Google Scholar] [CrossRef]
- Dong, H.; Li, T.; Wang, Z.; Ning, Y. Design and experiment of a piezoelectric actuator based on inchworm working principle. Sens. Actuators A 2020, 306, 111950. [Google Scholar] [CrossRef]
- Schoeftner, J.; Buchberger, G.; Brandl, A.; Irschik, H. Theoretical prediction and experimental verification of shape control of beams with piezoelectric patches and resistive circuits. Compos. Struct. 2015, 133, 746–755. [Google Scholar] [CrossRef] [Green Version]
- Kim, N.-I.; Chang, Y.-L.; Chen, J.; Barbee, T.; Wang, W.; Kime, J.-Y.; Kwon, M.-K.; Shervin, S.; Moradnia, M.; Pouladi, S.; et al. Piezoelectric pressure sensor based on flexible gallium nitride thin film for harsh-environment and high-temperature applications. Sens. Actuators A 2020, 305, 111940. [Google Scholar] [CrossRef]
- Sartorato, M.; de Medeiros, R.; Tita, V. A finite element formulation for smart piezoelectric composite shells: Mathematical formulation, computational analysis and experimental evaluation. Compos. Struct. 2015, 127, 185–198. [Google Scholar] [CrossRef]
- Song, G.; Sethib, V.; Li, H.-N. Vibration control of civil structures using piezoceramic smart materials: A review. Eng. Struct. 2006, 28, 1513–1524. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Chea, P.; Qin, Y.; Tian, Y.; Zhang, D. Design and analysis of a novel flexure-based 3-DOF mechanism. Mech. Mach. Theory 2014, 74, 173–187. [Google Scholar] [CrossRef]
- Liu, J.; Liu, Y.; Zhao, L.; Xu, D.; Chen, W.; Deng, J. Design and experiments of asingle-foot linear piezoelectric actuator operated in a stepping mode. IEEE Trans. Ind. Electron. 2018, 65, 8063–8071. [Google Scholar] [CrossRef]
- Sun, X.; Chen, W.; Zhang, J.; Zhou, R.; Chen, W. A novel piezo-driven linear-rotary inchworm actuator. Sens. Actuators A Phys. 2015, 224, 78–86. [Google Scholar] [CrossRef]
- Cheng, G.; Hu, Y.; Wen, J.; Zeng, P.; Xing, C. Piezoelectric inertial rotary actuatorsbased on asymmetrically clamping structures. Sens. Actuators A Phys. 2015, 223, 125–133. [Google Scholar] [CrossRef]
- Sharma, S.K.; Gaur, H.; Kulkarni, M.; Patil, G.; Bhattachary, B.; Sharma, A. PZT–PDMS composite for active damping of vibrations. Compos. Sci. Technol. 2013, 77, 42–51. [Google Scholar]
- Song, X.; Tan, S.; Wang, E.; Wu, S.; Wu, Z. Active shape control of an antenna reflector using piezoelectric actuators. J. Intell. Mater. Syst. Struct. 2019, 30, 18–19. [Google Scholar] [CrossRef]
- Austin, F.; Rossi, M.J.; Van Nostrand, W.; Knowles, G. Static shape control of adaptive wings. AIAA J. 1994, 32, 1895–1901. [Google Scholar]
- Sabatini, M.; Gasbarri, P.; Monti, R.; Palmerini, G.B. Vibration control of a flexible space manipulator during on orbit operations. Acta Astronaut. 2012, 73, 109–121. [Google Scholar]
- Azadi, M.; Fazelzadeh, S.A.; Eghtesad, M.; Azadi, E. Vibration suppression and adaptive-robust control of a smart flexible satellite with three axes maneuvering. Acta Astronaut. 2011, 69, 307–322. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, W.; Wu, Z.; Zhang, X. Integrated design of laminated composite structures with piezocomposite actuators for active shape control. Compos. Struct. 2019, 215, 166–177. [Google Scholar] [CrossRef]
- Irschik, H.; Nader, M. Actuator placement in static bending of smart beams utilizing Mohr’s analogy. Eng. Struct. 2009, 31, 1698–1706. [Google Scholar] [CrossRef]
- Zhang, S.-Q.; Li, Y.-X.; Schmidt, R. Active shape and vibration control for piezoelectric bonded composite structures using various geometric nonlinearities. Compos. Struct. 2015, 122, 239–249. [Google Scholar] [CrossRef]
- Nguyen, Q.; Tong, L. Shape control of smart composite plate with non-rectangular piezoelectric actuators. Compos. Struct. 2004, 66, 207–214. [Google Scholar] [CrossRef]
- Ren, L. A theoretical study on shape control of arbitrary lay-up laminates using piezoelectric actuators. Compos. Struct. 2008, 83, 110–118. [Google Scholar] [CrossRef]
- Gohari, S.; Sharifi, S.; Vrcelj, Z. A novel explicit solution for twisting control of smart laminated cantilever composite plates/beams using inclined piezoelectric actuators. Compos. Struct. 2017, 161, 477–504. [Google Scholar] [CrossRef]
- Chee, C.; Tang, L.; Steven, G.P. Piezoelectric Actuator Orientation Optimization for Static Shape Control of Composite Plates. Compos. Struct. 2002, 55, 169–184. [Google Scholar] [CrossRef]
- Lin, J.-C.; Nien, M.H. Adaptive modeling and shape control of laminated plates using piezoelectric actuators. J. Mater. Process. Technol. 2007, 189, 231–236. [Google Scholar] [CrossRef]
- Herakovich, C.T. Mechanics of Fibrous Composites; John Wiley & Sons, Inc.: New York, NY, USA, 1998; p. 14. [Google Scholar]
- Boston Piezo-Optics Inc., Boston, USA. Available online: https://bostonpiezooptics.com/ceramic-materials-pz (accessed on 21 February 2020).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Longitudinal Modulus E1 | Transverse Modulus E2 | Shear Modulus G12 | Shear Modulus G23 | Poisson’s Ratio v12 | Poisson’s Ratio v23 |
|---|---|---|---|---|---|
| 227 GPa | 139 GPa | 57.6 GPa | 49.1 GPa | 0.24 | 0.36 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Her, S.-C.; Chen, H.-Y. Deformation of Composite Laminates Induced by Surface Bonded and Embedded Piezoelectric Actuators. Materials 2020, 13, 3201. https://doi.org/10.3390/ma13143201
Her S-C, Chen H-Y. Deformation of Composite Laminates Induced by Surface Bonded and Embedded Piezoelectric Actuators. Materials. 2020; 13(14):3201. https://doi.org/10.3390/ma13143201
Chicago/Turabian StyleHer, Shiuh-Chuan, and Han-Yung Chen. 2020. "Deformation of Composite Laminates Induced by Surface Bonded and Embedded Piezoelectric Actuators" Materials 13, no. 14: 3201. https://doi.org/10.3390/ma13143201
APA StyleHer, S. -C., & Chen, H. -Y. (2020). Deformation of Composite Laminates Induced by Surface Bonded and Embedded Piezoelectric Actuators. Materials, 13(14), 3201. https://doi.org/10.3390/ma13143201