
Traction-Associated Peridynamic Motion Equation and Its Verification in the Plane Stress and Fracture Problems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Induced Body Force and Extension of Peridynamic Motion Equation
3. Peridynamic Constitutive Model
3.1. Balance Equation of Energy
3.2. Bond-Based Constitutive Models
- General microelastic models:
- 2.
- The prototype microelastic (PM) model:
3.3. Transfer Function of Boundary Traction
3.4. Prototype Microelastic Brittle Damage Model
4. Numerical Algorithm
4.1. Spatial Discretization
4.2. Time Integration
5. Some Plane Stress Benchmark Problems
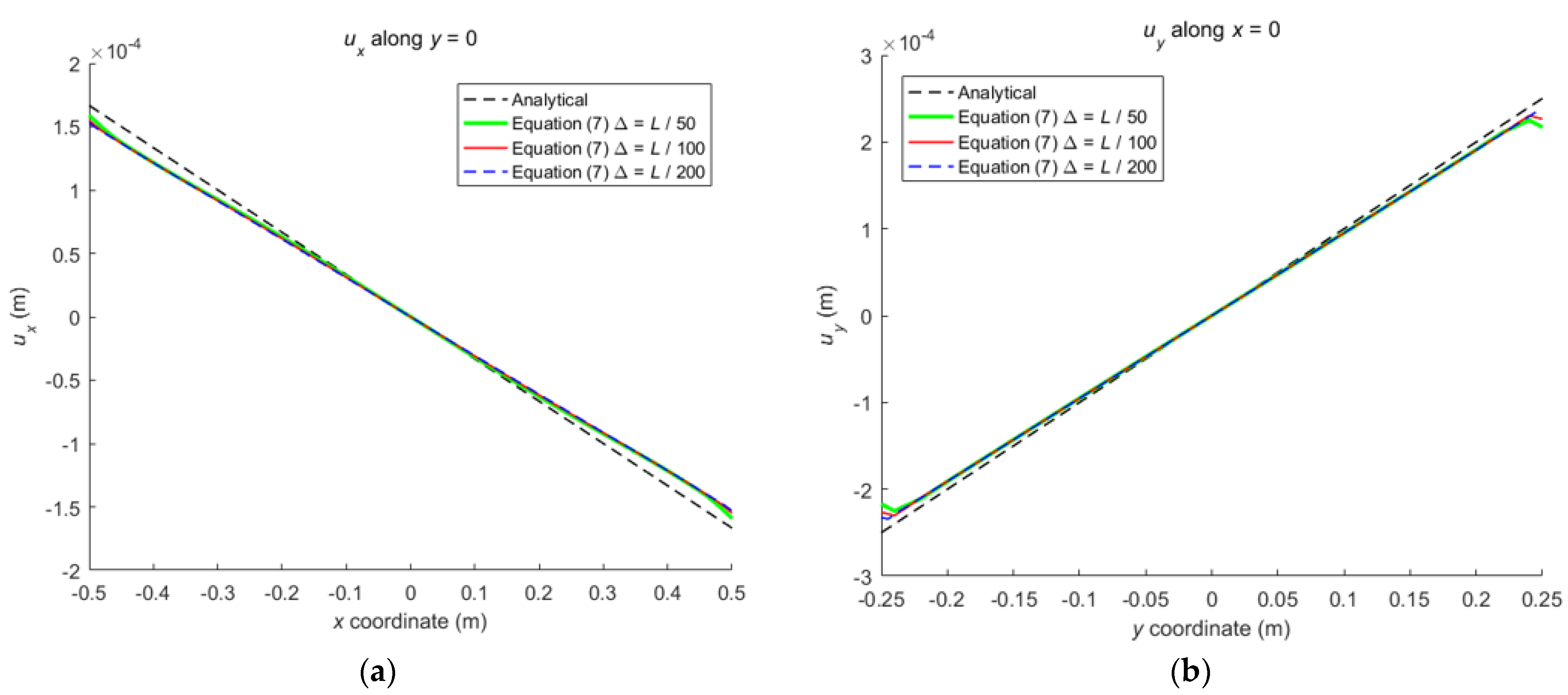
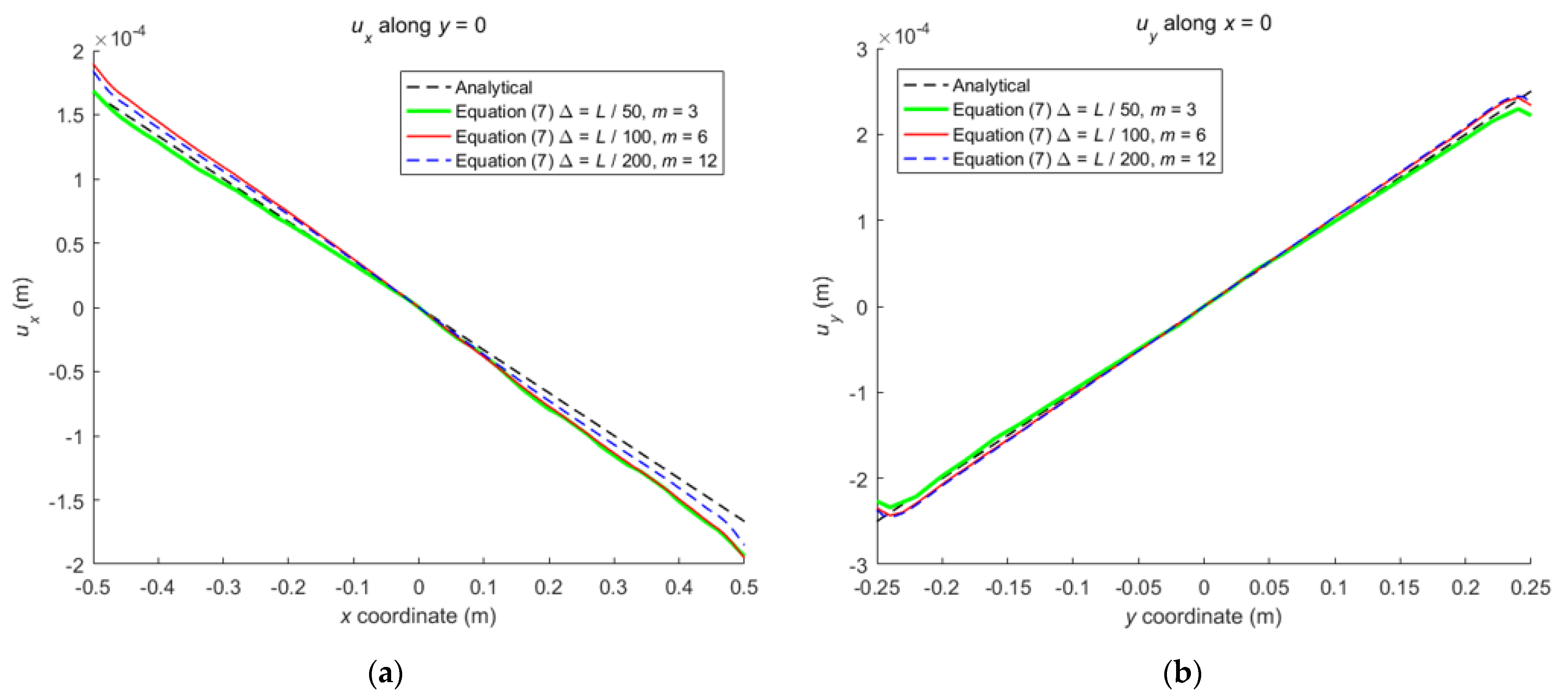
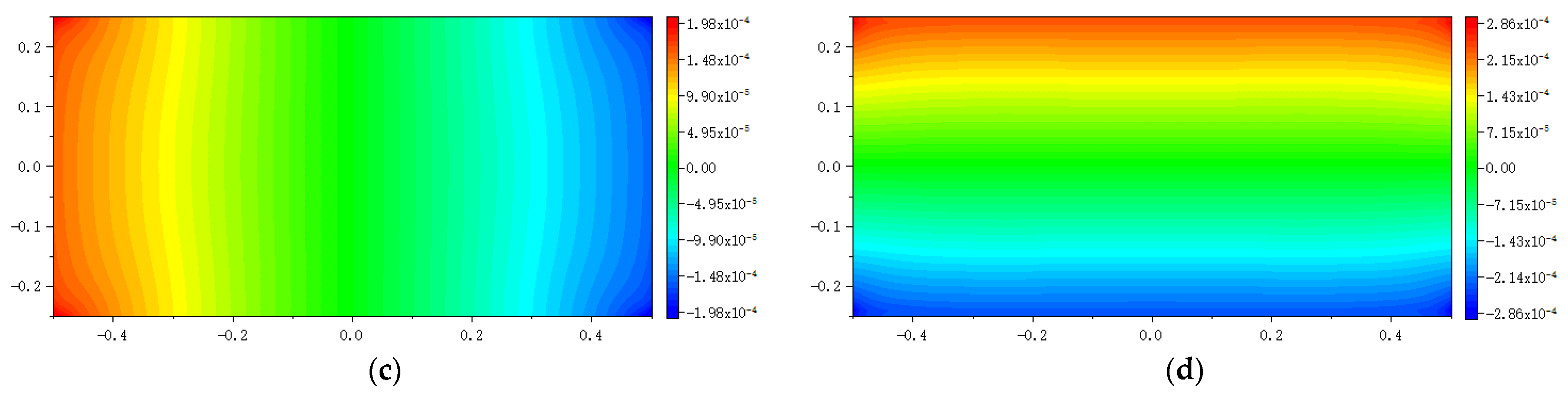
5.1. Example 1: A Rectangular Plate with Two Opposite Edges Subjected to Tension
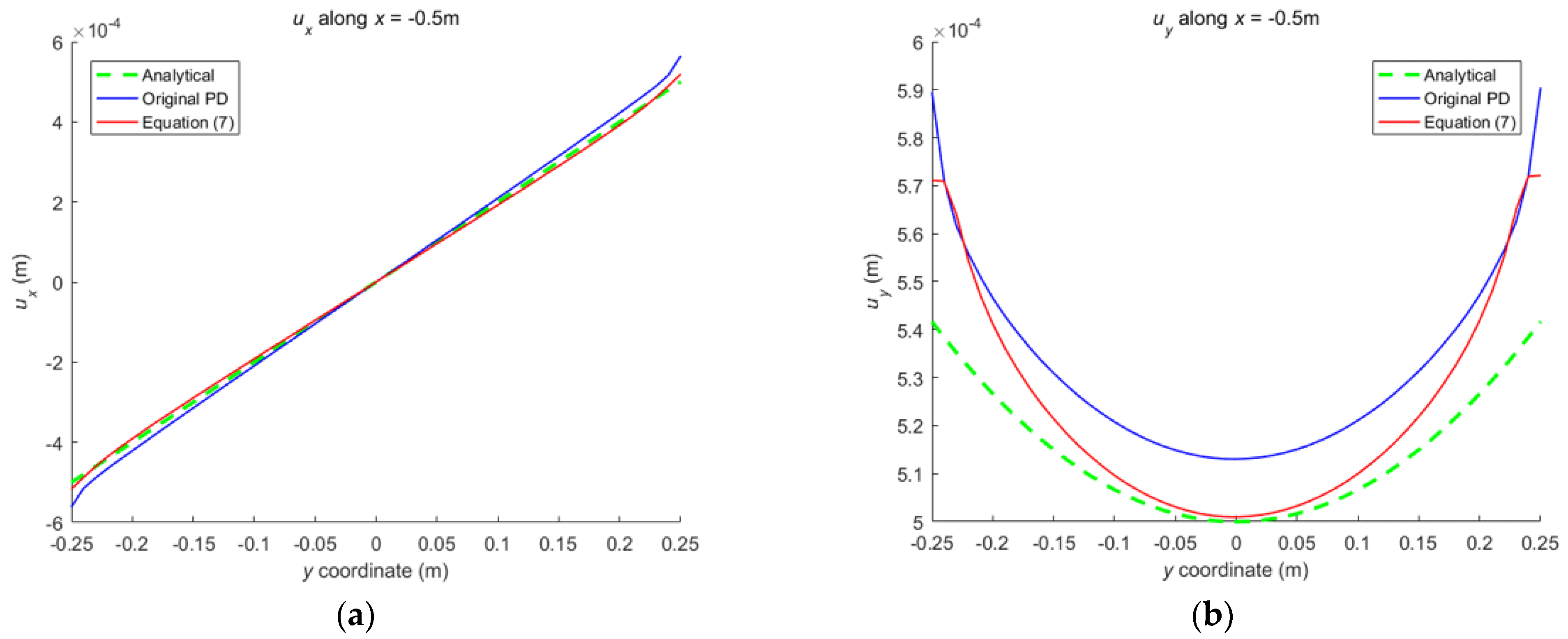
5.2. Example 2: A Rectangular Plate Subjected to Bending
5.3. Example 3: A Square Plate with A Circular Hole Subjected to Tension by Two Opposite Edges
5.4. Example 4: Failure of A Square Plate with A Circular Hole under Quasi-Static Loading
6. Conclusions
- The traction-associated peridynamic motion equation is consistent with the conservation laws of linear and angular momentum, and it is form-invariant under the Galileo transformation.
- The constitutive models in the original peridynamics can be inherited without modification by the traction-associated peridynamics. The concrete form of the induced body force is determined by matching with the constitutive models.
- Numerical calculations for the typical plane stress problems are in good agreement with the classical elasticity solutions, and the volume correction and the surface correction are no longer needed in the numerical algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Silling, S.A. Reformulation of elasticity theory for discontinuities and long-range forces. J. Mech. Phys. Solids 2000, 48, 175–209. [Google Scholar] [CrossRef] [Green Version]
- Silling, S.A.; Epton, M.; Weckner, O.; Xu, J.; Askari, E. Peridynamic states and constitutive modeling. J. Elast. 2007, 88, 151–184. [Google Scholar] [CrossRef] [Green Version]
- Silling, S.A.; Lehoucq, R.B. Peridynamic theory of solid mechanics. Adv. Appl. Mech. 2010, 44, 73–168. [Google Scholar]
- Madenci, E.; Oterkus, E. Peridynamic Theory and Its Applications; Springer: New York, NY, USA, 2014. [Google Scholar]
- Bobaru, F.; Foster, J.T.; Geubelle, P.H.; Silling, S.A. Handbook of Peridynamic Modeling; CRC Press: Boca Raton, USA, 2016. [Google Scholar]
- Javili, A.; Morasata, R.; Oterkus, E.; Oterkus, S. Peridynamics review. Math. Mech. Solids 2019, 24, 3714–3739. [Google Scholar] [CrossRef] [Green Version]
- Ladanyi, G.; Gonda, V. Review of peridynamics: Theory, applications and future perspectives. Stroj. Vestn. J. Mech. Eng. 2021, 67, 666–681. [Google Scholar] [CrossRef]
- Zhou, X.P.; Wang, Y.T. State-of-the-art review on the progressive failure characteristics of geomaterials in peridynamic theory. J. Eng. Mech. 2021, 147, 03120001. [Google Scholar] [CrossRef]
- Han, D.; Zhang, Y.; Wang, Q.; Lu, W.; Jia, B. The review of the bond-based peridynamics modeling. J. Micromech. Mol. Phys. 2019, 4, 1830001. [Google Scholar] [CrossRef]
- Le, Q.V.; Bobaru, F. Surface corrections for peridynamic models in elasticity and fracture. Comput. Mech. 2018, 61, 499–518. [Google Scholar] [CrossRef]
- Wu, C.T.; Ren, B. A stabilized non-ordinary state-based peridynamics for the nonlocal ductile material failure analysis in metal machining process. Comput. Methods Appl. Mech. Eng. 2015, 291, 197–215. [Google Scholar] [CrossRef]
- Madenci, E.; Dorduncu, M.; Barut, A.; Nam, P. Weak form of peridynamics for nonlocal essential and natural boundary conditions. Comput. Methods Appl. Mech. Eng. 2018, 337, 598–631. [Google Scholar] [CrossRef]
- Madenci, E.; Dorduncu, M.; Nam, P.; Gu, X. Weak form of bond-associated non-ordinary state-based peridynamics free of zero energy modes with uniform or non-uniform discretization. Eng. Fract. Mech. 2019, 218, 106613. [Google Scholar] [CrossRef]
- Scabbia, F.; Zaccariotto, M.; Galvanetto, U. A novel and effective way to impose boundary conditions and to mitigate the surface effect in state-based Peridynamics. Int. J. Numer. Methods Eng. 2021, 122, 5773–5811. [Google Scholar] [CrossRef]
- Scabbia, F.; Zaccariotto, M.; Galvanetto, U. A new method based on Taylor expansion and nearest-node strategy to impose Dirichlet and Neumann boundary conditions in ordinary state-based Peridynamics. Comput. Mech. 2022, 70, 1–27. [Google Scholar] [CrossRef]
- Huang, Z.X. Revisiting the peridynamic motion equation due to characterization of boundary conditions. Acta Mech. Sin. 2019, 35, 972–980. [Google Scholar] [CrossRef]
- Aksoylu, B.; Mengesha, T. Results on nonlocal boundary value problems. Numer. Funct. Anal. Optim. 2010, 31, 1301–1317. [Google Scholar] [CrossRef]
- Zhou, K.; Du, Q. Mathematical and numerical analysis of linear peridynamic models with nonlocal boundary conditions. SIAM J. Numer. Anal. 2010, 48, 1759–1780. [Google Scholar] [CrossRef] [Green Version]
- Silling, S.A.; Askari, E. A meshfree method based on the Peridynamic model of solid mechanics. Comput. Struct. 2005, 83, 1526–1535. [Google Scholar] [CrossRef]
- Liu, W.Y.; Hong, J.W. Discretized peridynamics for linear elastic solids. Comput. Mech. 2012, 50, 579–590. [Google Scholar] [CrossRef]
- Tupek, M.R.; Radovitzky, R. An extended constitutive correspondence formulation of peridynamics based on nonlinear bond-strain measures. J. Mech. Phys. Solids 2014, 65, 82–92. [Google Scholar] [CrossRef] [Green Version]
- Behzadinasab, M.; Foster, J.T. On the stability of the generalized, finite deformation correspondence model of peridynamics. Int. J. Solids Struct. 2019, 182, 64–76. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Yu, M.; Wang, X.; Huang, Z. Peridynamic analysis of 2-dimensional deformation and fracture based on an improved technique of exerting traction on boundary surface. Arch. Mech. 2022, 74, 441–461. [Google Scholar]
- Silling, S.A. Dynamic fracture modeling with a meshfree peridynamic code. In Computational Fluid and Solid Mechanics; Elsevier Science Ltd.: Amsterdam, The Netherlands, 2003; pp. 641–644. [Google Scholar]
- Parks, M.L.; Seleson, P.; Plimpton, S.J.; Silling, S.A. Peridynamics with LAMMPS: A User Guide v0.3 Beta; Sandia Report 2011–8253; Sandia National Laboratories: Albuquerque, NM, USA, 2011. [Google Scholar]
- Ha, Y.D. An extended ghost interlayer model in peridynamic theory for high-velocity impact fracture of laminated glass structures. Comput. Math. Appl. 2020, 80, 744–761. [Google Scholar] [CrossRef]
- Shojaei, A.; Hermann, A.; Cyron, C.J.; Seleson, P.; Silling, S.A. A hybrid meshfree discretization to improve the numerical performance of peridynamic models. Comput. Methods Appl. Mech. Eng. 2022, 391, 114544. [Google Scholar] [CrossRef]
- Shojaei, A.; Hermann, A.; Seleson, P.; Silling, S.A.; Rabczuk, T.; Cyron, C.J. Peridynamic elastic waves in two-dimensional unbounded domains: Construction of nonlocal Dirichlet-type absorbing boundary conditions. Comput. Methods Appl. Mech. Eng. 2023, 407, 115948. [Google Scholar] [CrossRef]
- Shojaei, A.; Hermann, A.; Seleson, P.; Cyron, C.J. Dirichlet absorbing boundary conditions for classical and peridynamic diffusion-type models. Comput. Mech. 2020, 66, 773–793. [Google Scholar] [CrossRef]
- Madenci, E.; Barut, A.; Phan, N. Bond-based peridynamics with stretch and rotation kinematics for opening and shearing modes of fracture. J. Peridyn. Nonlocal Model. 2021, 3, 211–254. [Google Scholar] [CrossRef]
- Zhang, Y.; Madenci, E. A coupled peridynamic and finite element approach in ANSYS framework for fatigue life prediction based on the kinetic theory of fracture. J. Peridyn. Nonlocal Model. 2022, 4, 51–87. [Google Scholar] [CrossRef]
- Trask, N.; You, H.; Yu, Y.; Parks, M.L. An asymptotically compatible meshfree quadrature rule for nonlocal problems with applications to peridynamics. Comput. Methods Appl. Mech. Eng. 2018, 343, 151–165. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; You, H.; Trask, N. An asymptotically compatible treatment of traction loading in linearly elastic peridynamic fracture. Comput. Meth. Appl. Mech. Eng. 2021, 377, 113691. [Google Scholar] [CrossRef]
- Reddy, J.N. An Introduction to Continuum Mechanics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Holzapfel, G.A. Nonlinear Solid Mechanics: A Continuum Approach for Engineering; Ringgold Inc.: Portland, OR, USA, 2000. [Google Scholar]
- Nishawala, V.V.; Ostoja-Starzewski, M. Peristatic solutions for finite one- and two-dimensional systems. Math. Mech. Solids 2017, 22, 1639–1653. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.G.; Bobaru, F. Selecting the kernel in a peridynamic formulation: A study for transient heat diffusion. Comput. Phys. Commun. 2015, 197, 51–60. [Google Scholar] [CrossRef]
- Kilic, B.; Madenci, E. An adaptive dynamic relaxation method for quasi-static simulations using the peridynamic theory. Theor. Appl. Fract. Mech. 2010, 53, 194–204. [Google Scholar] [CrossRef]
- Kilic, B. Peridynamic Theory for Progressive Failure Prediction in Homogeneous and Heterogeneous Materials. Doctor Thesis, The University of Arizona, Tucson, AZ, USA, 2008. [Google Scholar]
- Ni, T.; Zhu, Q.Z.; Zhao, L.Y.; Li, P.F. Peridynamic simulation of fracture in quasi brittle solids using irregular finite element mesh. Eng. Fract. Mech. 2018, 188, 320–343. [Google Scholar] [CrossRef]
- Bobaru, F.; Yang, M.J.; Alves, L.F.; Silling, S.A.; Askari, E.; Xu, J.F. Convergence, adaptive refinement, and scaling in 1D peridynamics. Int. J. Numer. Methods Eng. 2009, 77, 852–877. [Google Scholar] [CrossRef] [Green Version]
- Ha, Y.D.; Bobaru, F. Studies of dynamic crack propagation and crack branching with peridynamic. Int. J. Fract. 2010, 162, 229–244. [Google Scholar] [CrossRef] [Green Version]
- Bobaru, F.; Zhang, G.F. Why do cracks branch? A peridynamic investigation of dynamic brittle fracture. Int. J. Fract. 2015, 196, 59–98. [Google Scholar] [CrossRef]
- Liu, M.H.; Wang, Q.; Lu, W. Peridynamic simulation of brittle-ice crushed by a vertical structure. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 209–218. [Google Scholar] [CrossRef] [Green Version]


























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Zhou, Z.; Huang, Z. Traction-Associated Peridynamic Motion Equation and Its Verification in the Plane Stress and Fracture Problems. Materials 2023, 16, 2252. https://doi.org/10.3390/ma16062252
Yu M, Zhou Z, Huang Z. Traction-Associated Peridynamic Motion Equation and Its Verification in the Plane Stress and Fracture Problems. Materials. 2023; 16(6):2252. https://doi.org/10.3390/ma16062252
Chicago/Turabian StyleYu, Ming, Zeyuan Zhou, and Zaixing Huang. 2023. "Traction-Associated Peridynamic Motion Equation and Its Verification in the Plane Stress and Fracture Problems" Materials 16, no. 6: 2252. https://doi.org/10.3390/ma16062252
APA StyleYu, M., Zhou, Z., & Huang, Z. (2023). Traction-Associated Peridynamic Motion Equation and Its Verification in the Plane Stress and Fracture Problems. Materials, 16(6), 2252. https://doi.org/10.3390/ma16062252