A Component-Based Multi-Layer Parallel Network for Airplane Detection in SAR Imagery



Abstract
:1. Introduction
2. Fundamental Network for Object Detection
3. Component-Based Multi-Layer Parallel Network for Airplane Detection
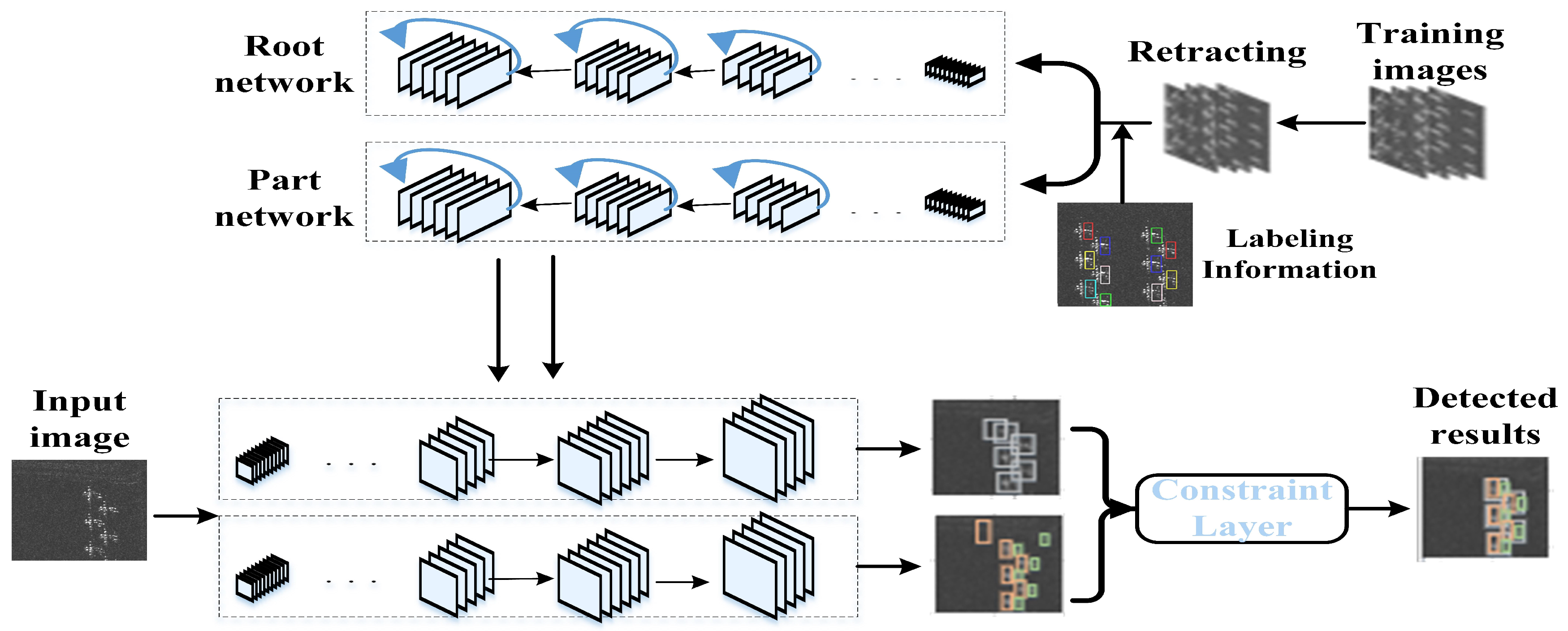
3.1. Framework of the Proposed Algorithm
3.2. Parallel Detection Network
3.2.1. Training of the Detection Network
3.2.2. Preliminary Detection
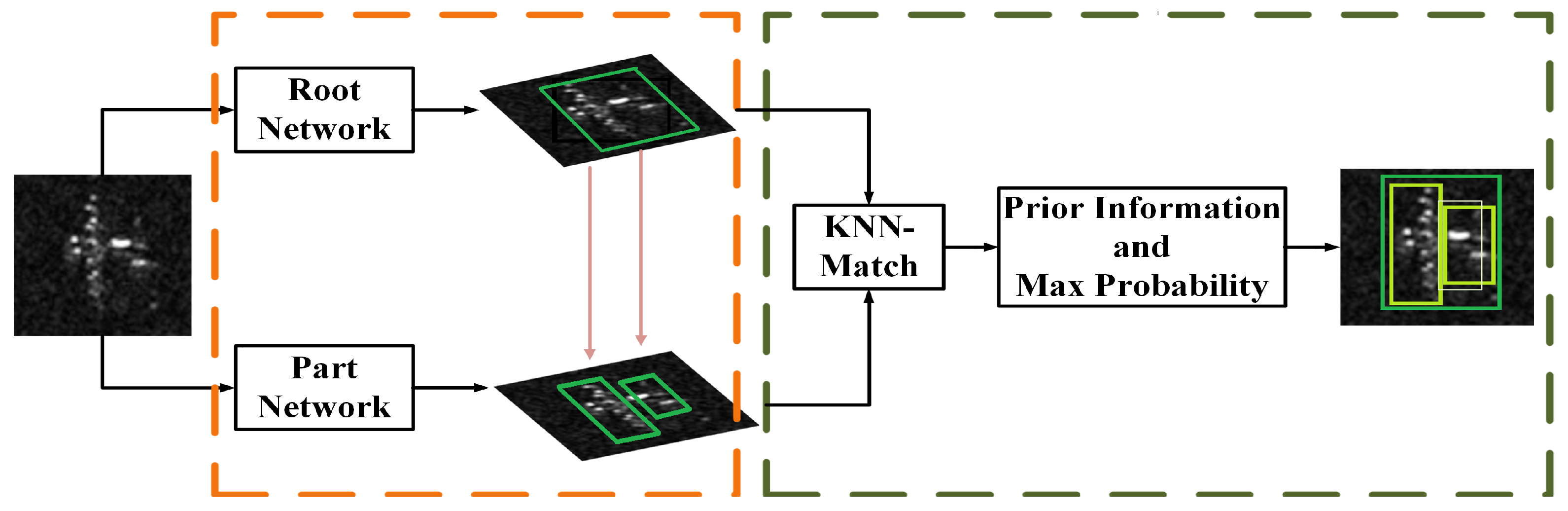
3.3. Discriminative Constraint Based on Priori Information and Maximum Probability
3.3.1. KNN Match
- a.
- According to the target set, divide the search points into N regions.
- b.
- For the point in region I, search the k points that are closest to the target point in corresponding region I.
- c.
- For the distance of the kth point obtained in last step, find the region with the same distance.
- d.
- In the region that has been found, find the closer point.
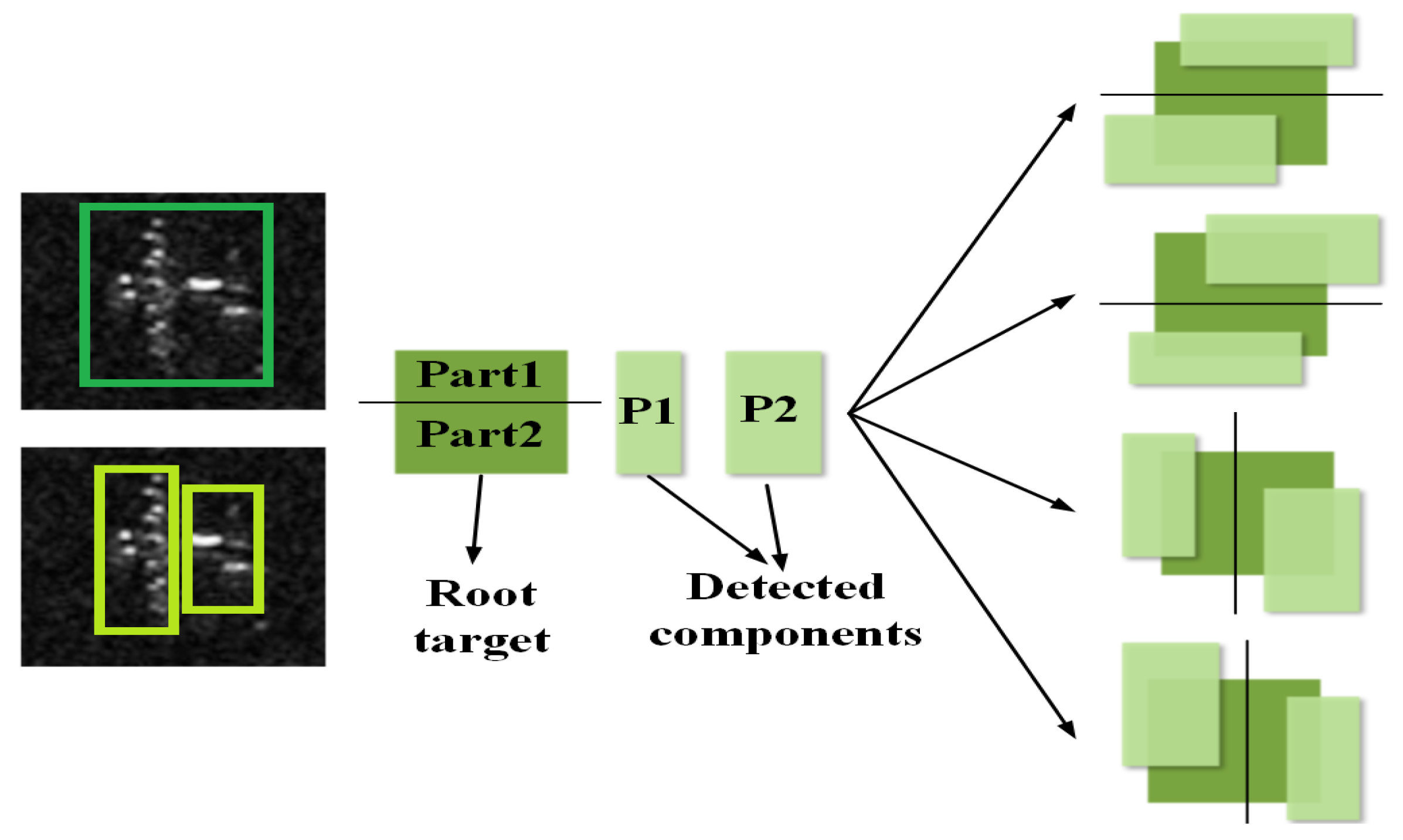
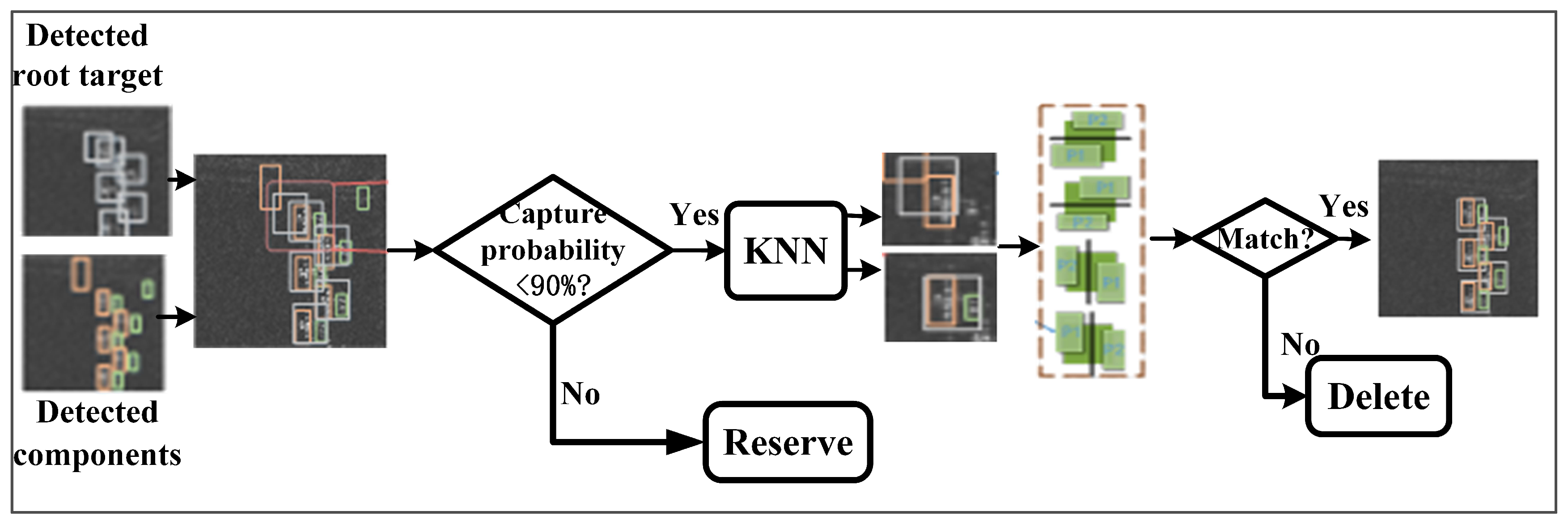
3.3.2. Discriminative Constraint
- a.
- If the capture probability of the root target is more than , reserve the root target directly.
- b.
- For root targets with capture probability below , calculate the overlap rate of the component with the root target. If no matching components are found, filter the root target.
- c.
- If both the overlap rates between component and , and the root target are over , estimate the component distribution.
- d.
- If the distribution of the two components does not belong to the four cases above, filter the corresponding root target, otherwise retain it as the final result.
3.4. Flow Chart of the Proposed Algorithm
4. Experiment
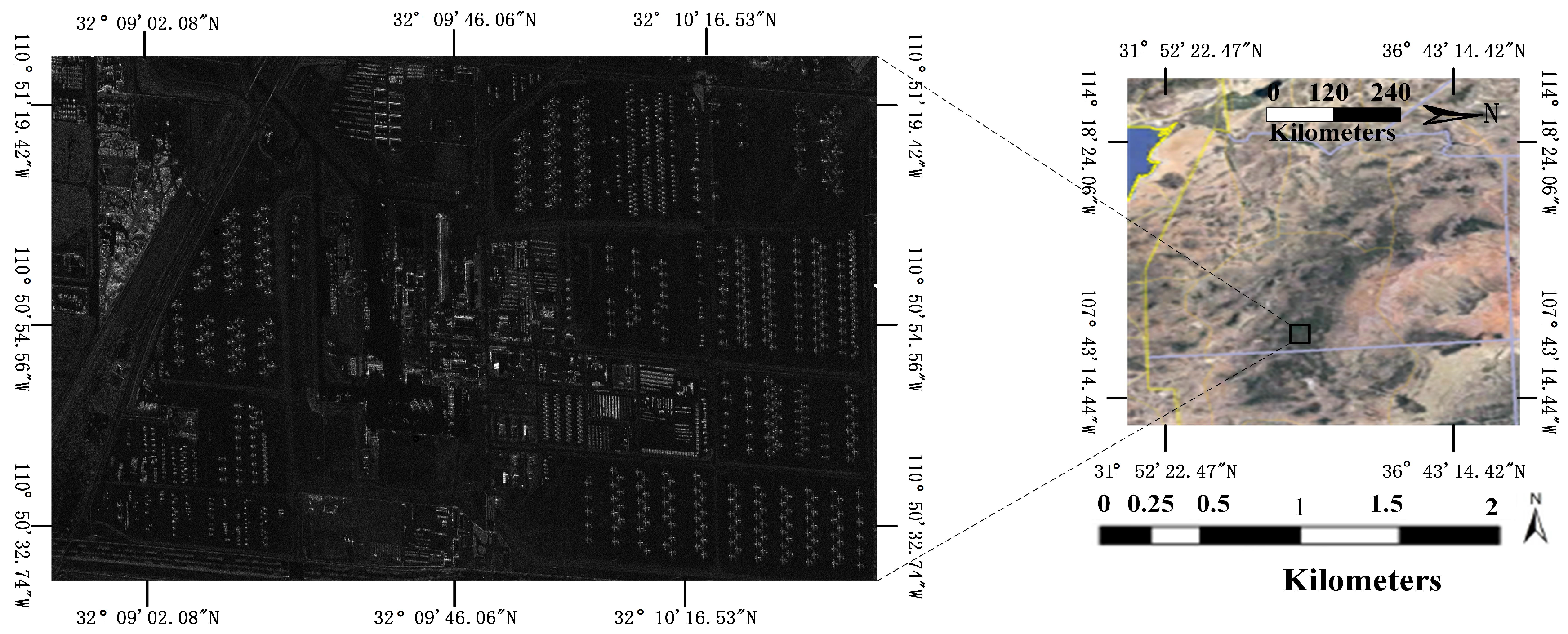
4.1. Experimental Data and Setting
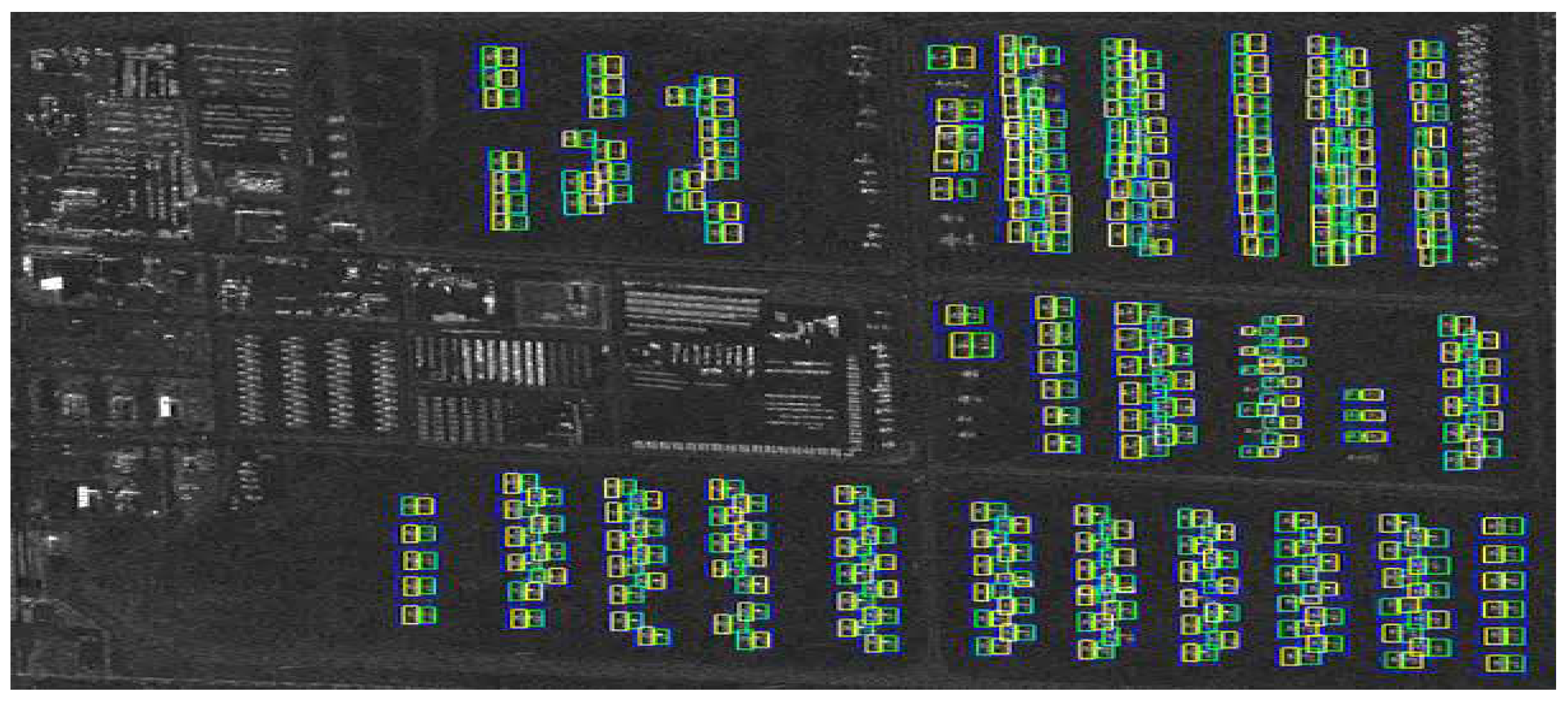
4.2. Experimental Results and Analysis
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Van Zyl, J.; Kim, Y. Synthetic Aperture Radar Polarimetry; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- He, C.; Li, S.; Liao, Z.; Liao, M. Texture classification of PolSAR data based on sparse coding of wavelet polarization textons. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4576–4590. [Google Scholar] [CrossRef]
- Finn, H.M. Adaptive detection mode with threshold control as a function of spatially sampled clutter-level estimates. RCA Rev. 1968, 29, 414–464. [Google Scholar]
- Hansen, V.G. Constant false alarm rate processing in search radars. Radar Present Future 1973, 105, 325–332. [Google Scholar]
- Trunk, G.V. Range resolution of targets using automatic detectors. IEEE Trans. Aerosp. Electron. Syst. 1978, AES-14, 750–755. [Google Scholar] [CrossRef]
- Kuttikkad, S.; Chellappa, R. Non-Gaussian CFAR techniques for target detection in high resolution SAR images. In Proceedings of the 1st International Conference on Image Processing, Austin, TX, USA, 13–16 November 1994; Volume 1, pp. 910–914. [Google Scholar]
- Tello, M.; Lopez-Martinez, C.; Mallorqui, J.J. A novel algorithm for ship detection in SAR imagery based on the wavelet transform. IEEE Geosci. Remote Sens. Lett. 2005, 2, 201–205. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Girshick, R.B.; Mcallester, D.; Ramanan, D. Object detection with discriminatively trained part-based models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Li, Q.; Li, Y.; Tian, J. Aircraft Detection in High-Resolution SAR Images Based on a Gradient Textural Saliency Map. Sensors 2015, 15, 23071–23094. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dou, F.; Diao, W.; Sun, X.; Wang, S.; Fu, K.; Xu, G. Aircraft recognition in high resolution SAR images using saliency map and scattering structure features. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1575–1578. [Google Scholar]
- Deng, L.; Yu, D. Deep Learning: Methods and Applications. Found. Trends Signal Process. 2014, 7, 197–387. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Ross, G. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision, Washington, DC, USA, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Joseph, R.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- He, C.; Zhuo, T.; Ou, D.; Liu, M.; Liao, M. Nonlinear compressed sensing-based LDA topic model for polarimetric SAR image classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 972–982. [Google Scholar] [CrossRef]
- Minaee, S.; Abdolrashidiy, A.; Wang, Y. An experimental study of deep convolutional features for iris recognition. In Proceedings of the 2016 IEEE Signal Processing in Medicine and Biology Symposium (SPMB), Philadelphia, PA, USA, 3 December 2016; pp. 1–6. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Khosla, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Parvin, H.; Alizadeh, H.; Minati, B. A Modification on K-Nearest Neighbor Classifier. Glob. J. Comput. Sci. Technol. 2010, 10, 37–41. [Google Scholar]
- Amal, M.A.; Riadh, B.A.A. Survey of Nearest Neighbor Condensing Techniques. Int. J. Adv. Comput. Sci. Appl. 2011, 2, 59–64. [Google Scholar] [CrossRef]
- Vijay, R.; Mahajan, P.; Kandwal, R. Hamming Distance based Clustering Algorithm. Int. J. Inf. Retr. Res. 2012, 2, 11–20. [Google Scholar] [CrossRef]
- Mahadi, S.; Kokate, S. A Fast nearest Neighbor Search Using K-D Tree and Inverted Files. Int. J. Adv. Res. Comput. Sci. Manag. Stud. 2016, 4, 362–367. [Google Scholar]
- Xia, S.; Xiong, Z.; Luo, Y.; Xu, W.; Zhang, G. Effectiveness of the Euclidean distance in high dimensional spaces. Opt. Int. J. Light Electron Opt. 2015, 126, 5614–5619. [Google Scholar] [CrossRef]
- Kaur, D. A Comparative Study of Various Distance Measures for Software fault prediction. Int. J. Comput. Trends Technol. 2014, 17, 117–120. [Google Scholar] [CrossRef] [Green Version]
- Chu, H.; Mingxia, T.; Dehui, X.; Feng, T.; Mingsheng, L. Adaptive Component Selection-Based Discriminative Model for Object Detection in High-Resolution SAR Imagery. ISPRS Int. J. Geo-Inf. 2018, 7, 72. [Google Scholar] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategies | Name | Calculation Formula |
|---|---|---|
| K-d Tree Search | Euclidean distance | |
| Minkowski distance | ||
| Manhattan distance | ||
| Chebyshev distance | ||
| Correlation distance | ||
| Exhaustive Search | Standardized Euclidean distance | |
| Mahalanobis distance | ||
| Angle cosine distance | ||
| Hamming distance | ||
| Jaccard distance |
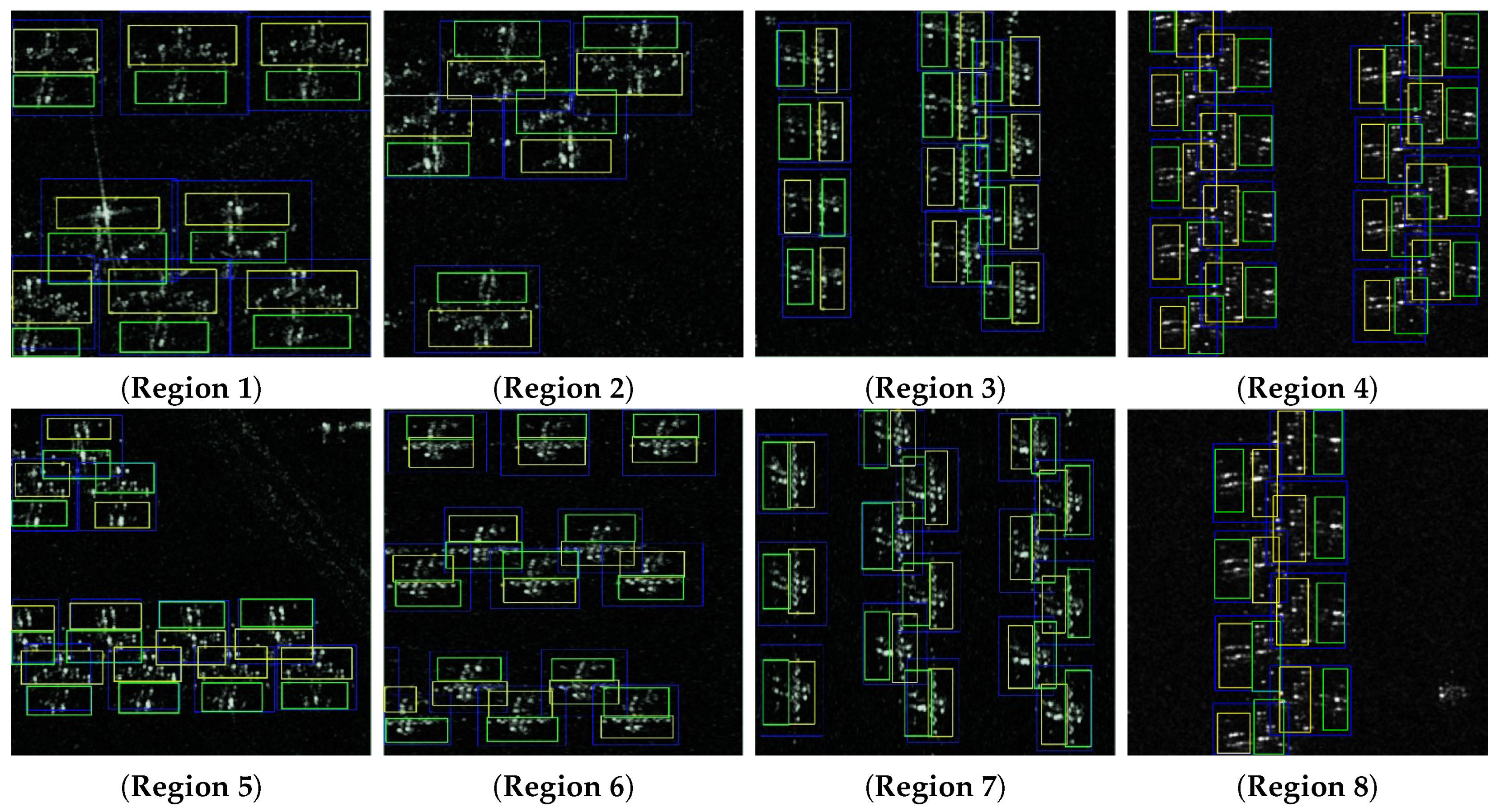
| Region | Labeled Image | Root Detection Results | Final Detection Results |
|---|---|---|---|
| Region 1 |  |  |  |
| Region 2 |  |  |  |
| Region 3 |  |  |  |
| Region 4 |  |  |  |
| Region 5 |  |  |  |
| Region 6 |  |  |  |
| Region 7 |  |  |  |
| Region 8 |  |  |  |
| Region 9 |  |  |  |
| Region 10 |  |  |  |
| Region | Two stages | Correctly Detected Number | Missing Number | Wrongly Detected Number |
|---|---|---|---|---|
| Region 1 | Root detection | 12 | 0 | 0 |
| Final detection | 12 | 0 | 0 | |
| Region 2 | Root detection | 20 | 0 | 3 |
| Final detection | 20 | 0 | 0 | |
| Region 3 | Root detection | 8 | 0 | 0 |
| Final detection | 8 | 0 | 0 | |
| Region 4 | Root detection | 5 | 0 | 1 |
| Final detection | 5 | 0 | 0 | |
| Region 5 | Root detection | 11 | 0 | 1 |
| Total detection | 11 | 0 | 0 | |
| Region 6 | Root detection | 17 | 0 | 1 |
| Final detection | 17 | 0 | 0 | |
| Region 7 | Root detection | 8 | 0 | 0 |
| Final detection | 8 | 0 | 0 | |
| Region 8 | Root detection | 8 | 0 | 1 |
| Final detection | 8 | 0 | 0 | |
| Region 9 | Root detection | 15 | 0 | 1 |
| Final detection | 15 | 0 | 0 | |
| Region 10 | Root detection | 13 | 0 | 2 |
| Final detection | 13 | 0 | 1 | |
| Total | Root detection | 117 | 0 | 10 |
| Final detection | 117 | 0 | 1 |
| Methods | Accuracy P | False Alarm Rate | Recall Rate R | Training Time | Detection Time |
|---|---|---|---|---|---|
| CFAR Algorithm | 0.732 | 0.268 | 0.932 | / | 20 s |
| ACSDM Model | 0.964 | 0.036 | 0.915 | 5 h | 7 s |
| The Proposed Appro. | 0.992 | 0.008 | 1 | 22 h | 0.9 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, C.; Tu, M.; Xiong, D.; Tu, F.; Liao, M. A Component-Based Multi-Layer Parallel Network for Airplane Detection in SAR Imagery. Remote Sens. 2018, 10, 1016. https://doi.org/10.3390/rs10071016
He C, Tu M, Xiong D, Tu F, Liao M. A Component-Based Multi-Layer Parallel Network for Airplane Detection in SAR Imagery. Remote Sensing. 2018; 10(7):1016. https://doi.org/10.3390/rs10071016
Chicago/Turabian StyleHe, Chu, Mingxia Tu, Dehui Xiong, Feng Tu, and Mingsheng Liao. 2018. "A Component-Based Multi-Layer Parallel Network for Airplane Detection in SAR Imagery" Remote Sensing 10, no. 7: 1016. https://doi.org/10.3390/rs10071016
APA StyleHe, C., Tu, M., Xiong, D., Tu, F., & Liao, M. (2018). A Component-Based Multi-Layer Parallel Network for Airplane Detection in SAR Imagery. Remote Sensing, 10(7), 1016. https://doi.org/10.3390/rs10071016