Application of Spectral Mixture Analysis to Vessel Monitoring Using Airborne Hyperspectral Data


 , , and
, , and
Abstract
:
1. Introduction
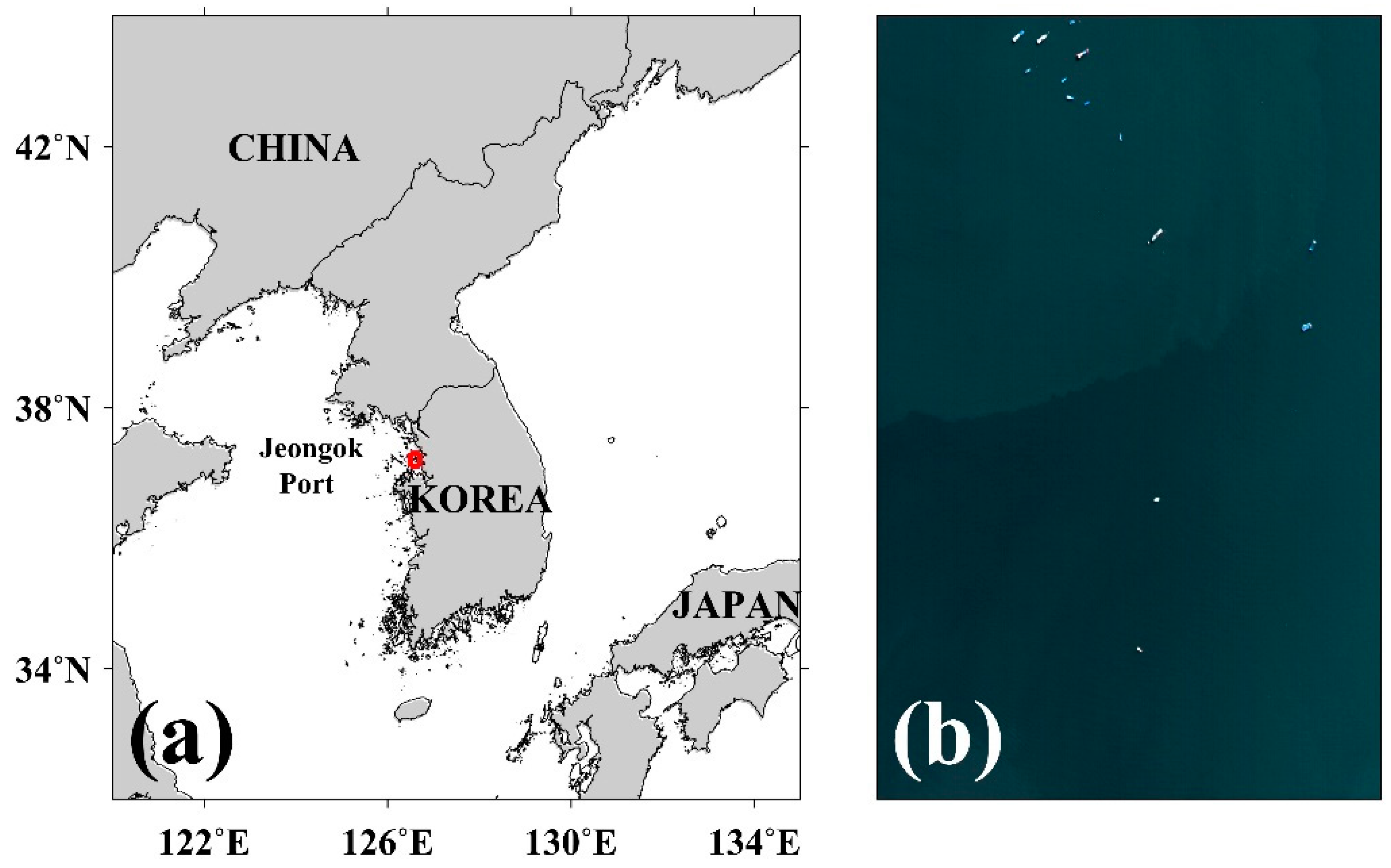
2. Data and Methods
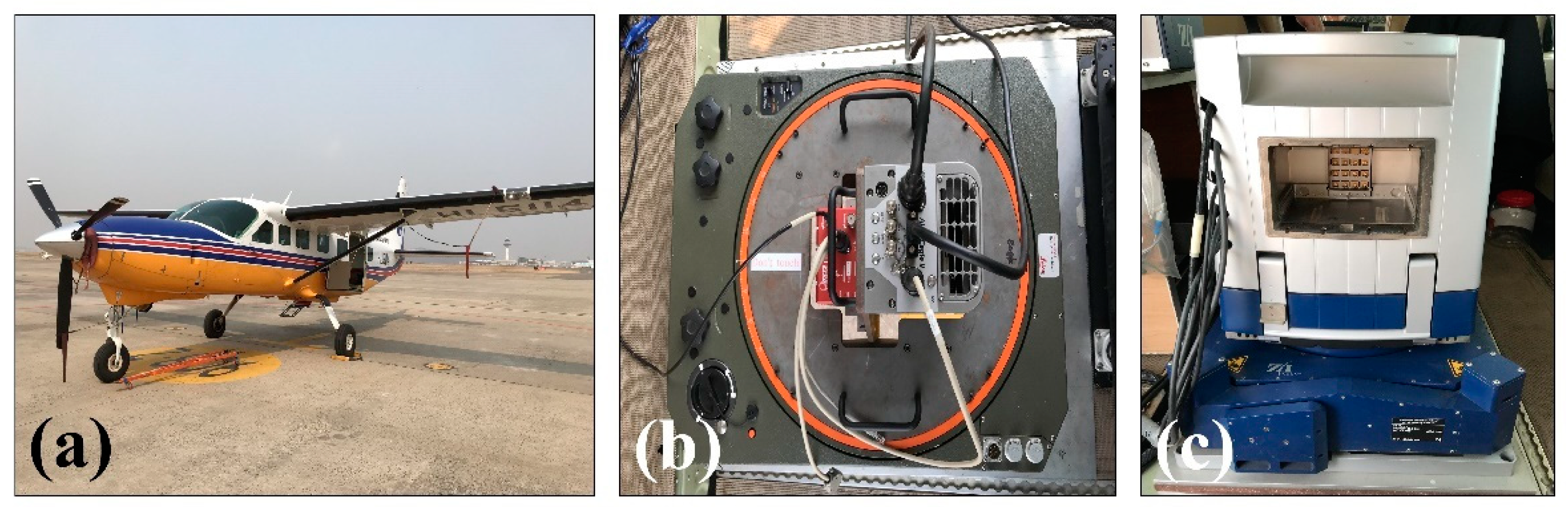
2.1. Airborne Hyperspectral Measurements
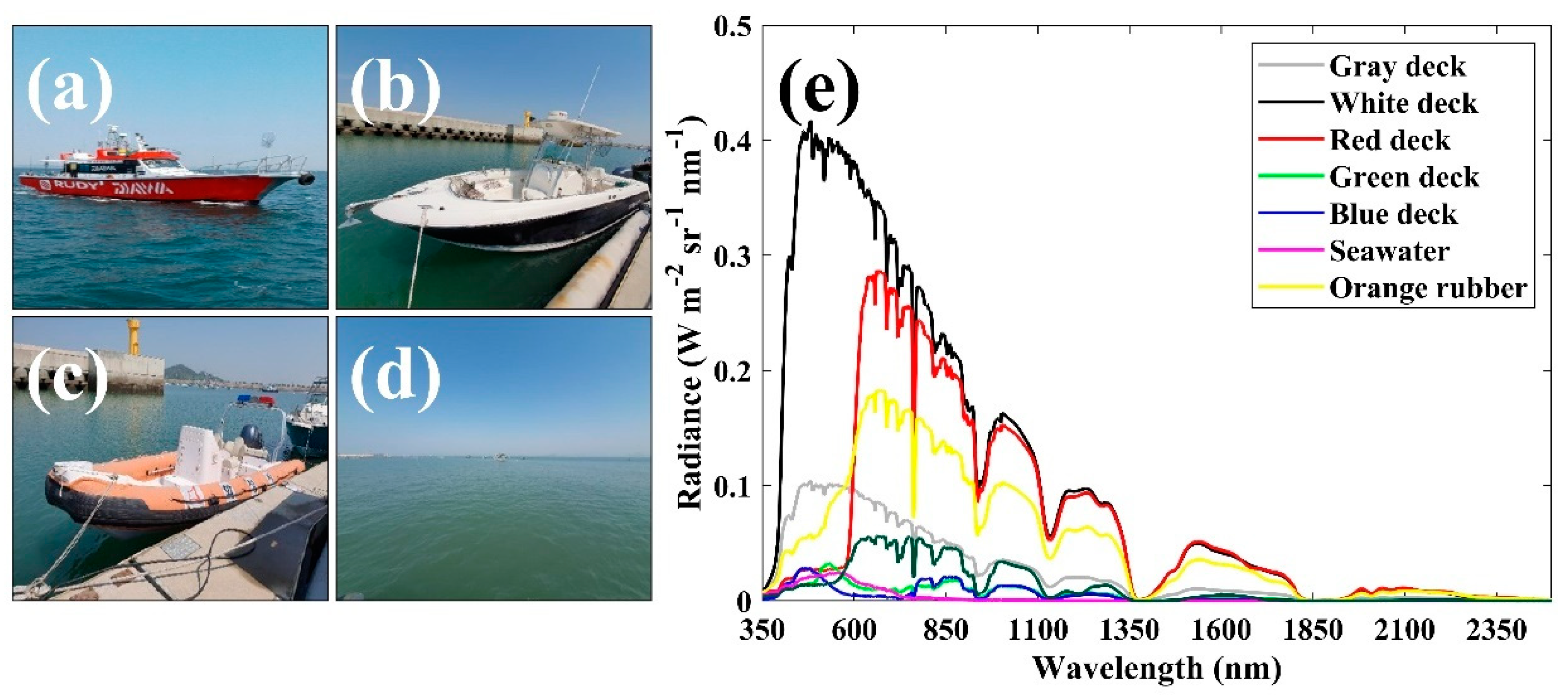
2.2. In-Situ Spectral Measurements
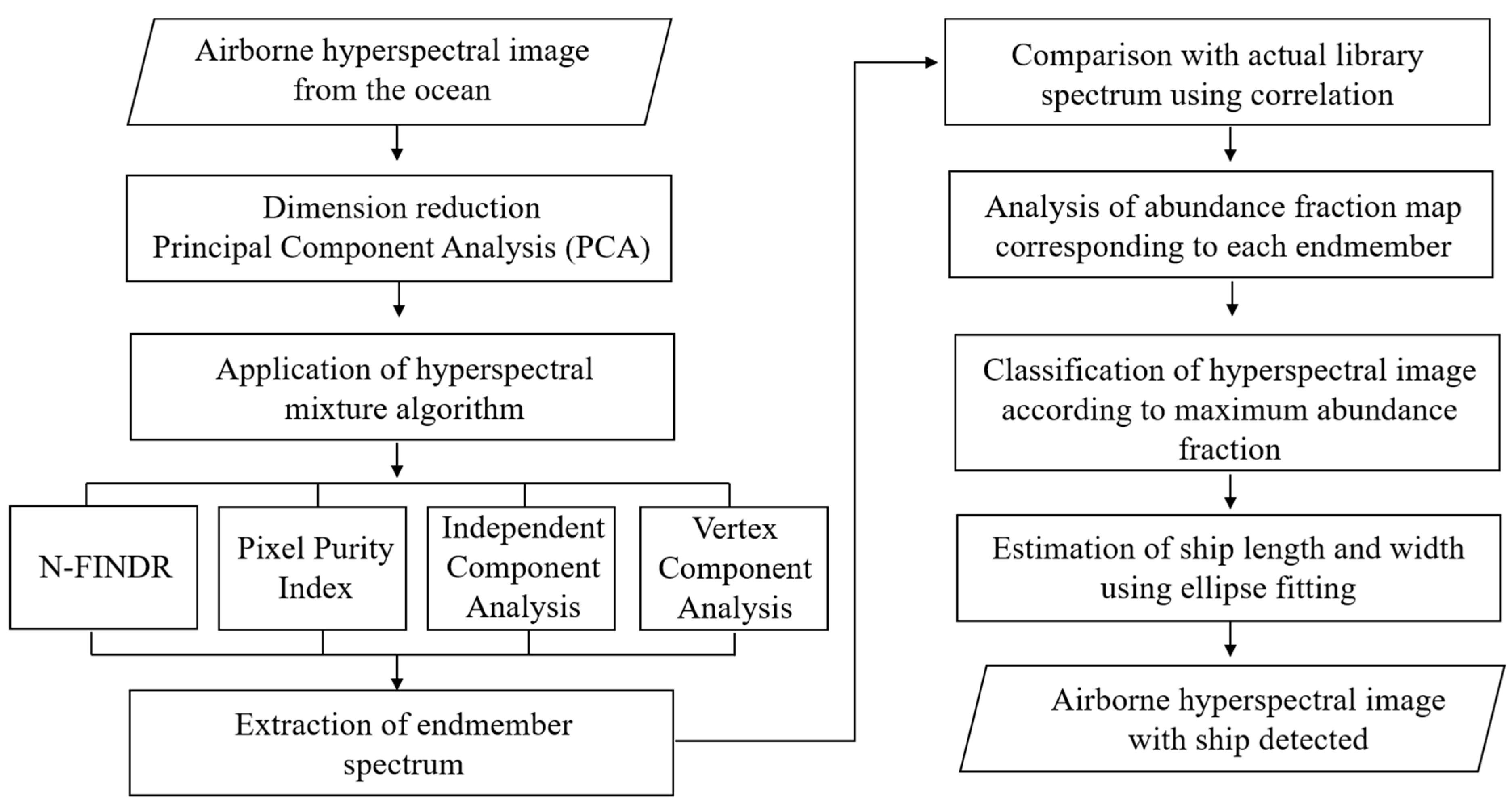
2.3. Procedure for Vessel Detection Using Hyperspectral Image
2.4. Dimension Reduction Process
2.5. Application of Spectral Mixture Algorithm
2.6. Ellipse Fitting for Vessel Size Estimation
3. Results
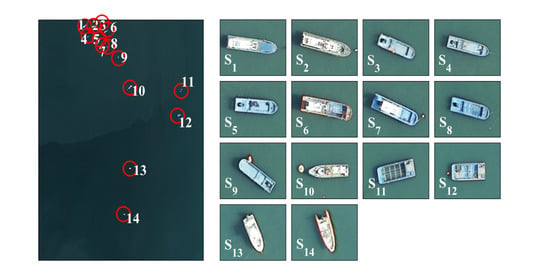
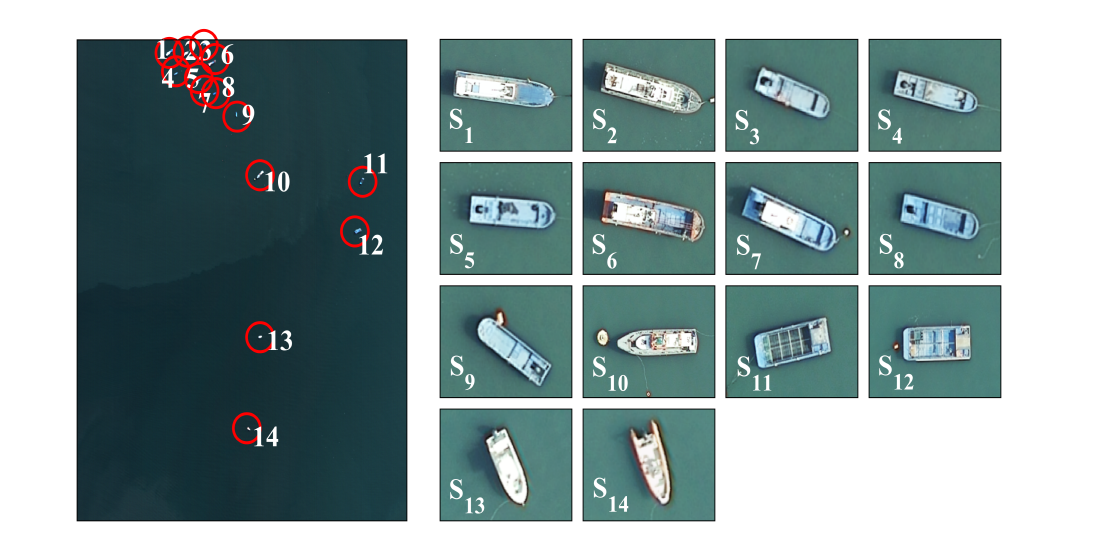
3.1. RGB Composite of Hyperspectral Data and DMC Image
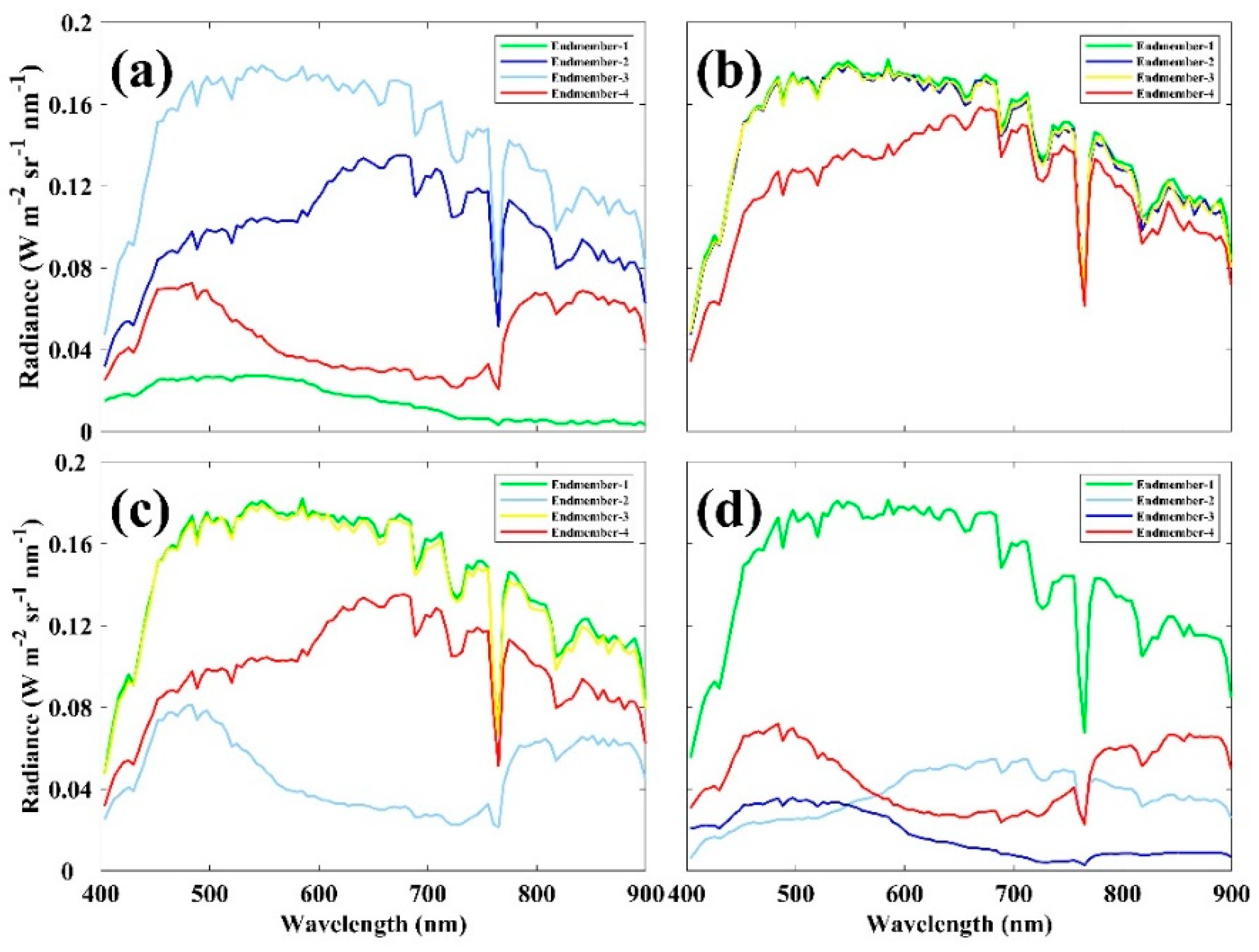
3.2. Application of the Four Spectral Mixture Algorithms
3.3. Comparison of the Endmember Spectrum Using Spectral Correlation
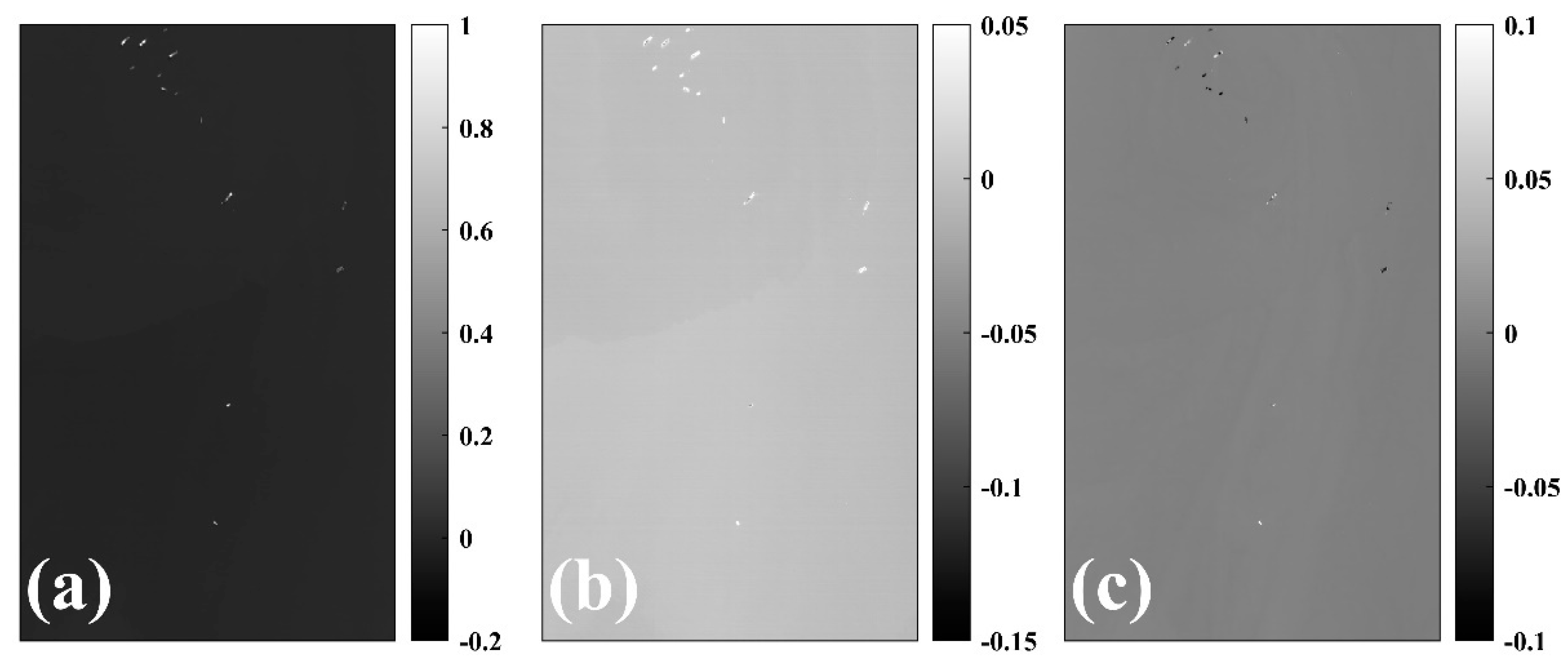
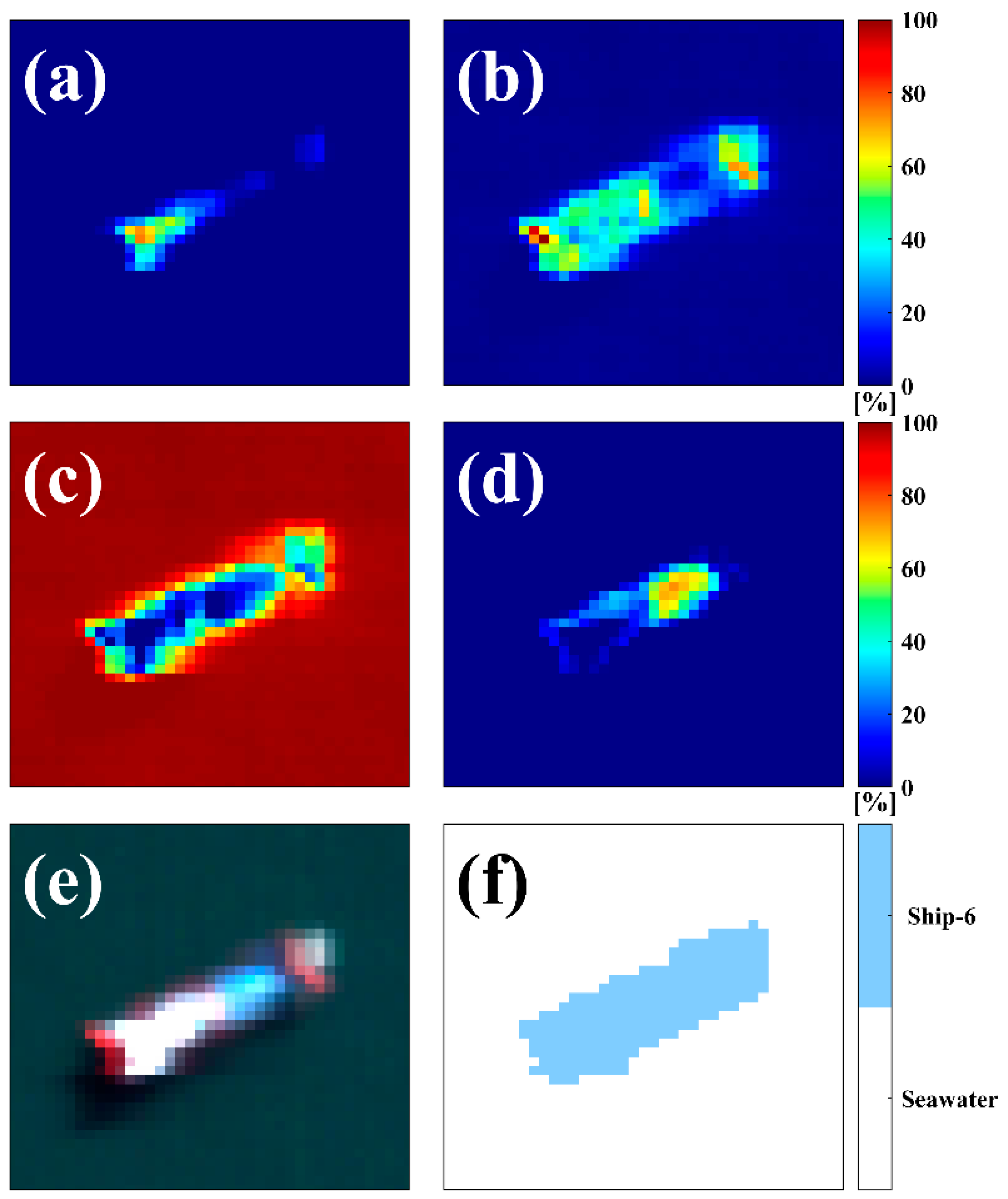
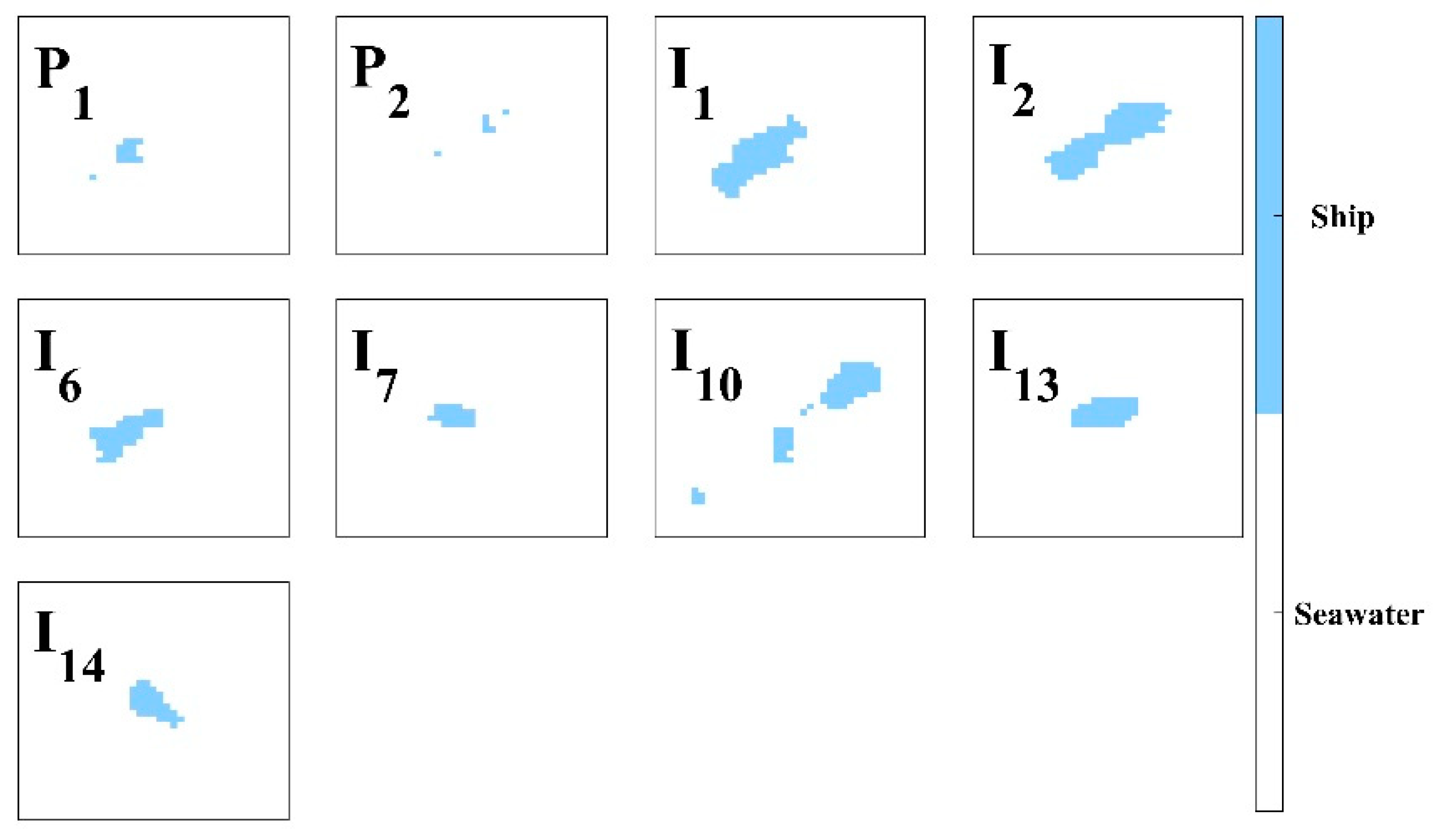
3.4. Vessel Detection Using the Abundance Fraction of Endmembers (Structure)
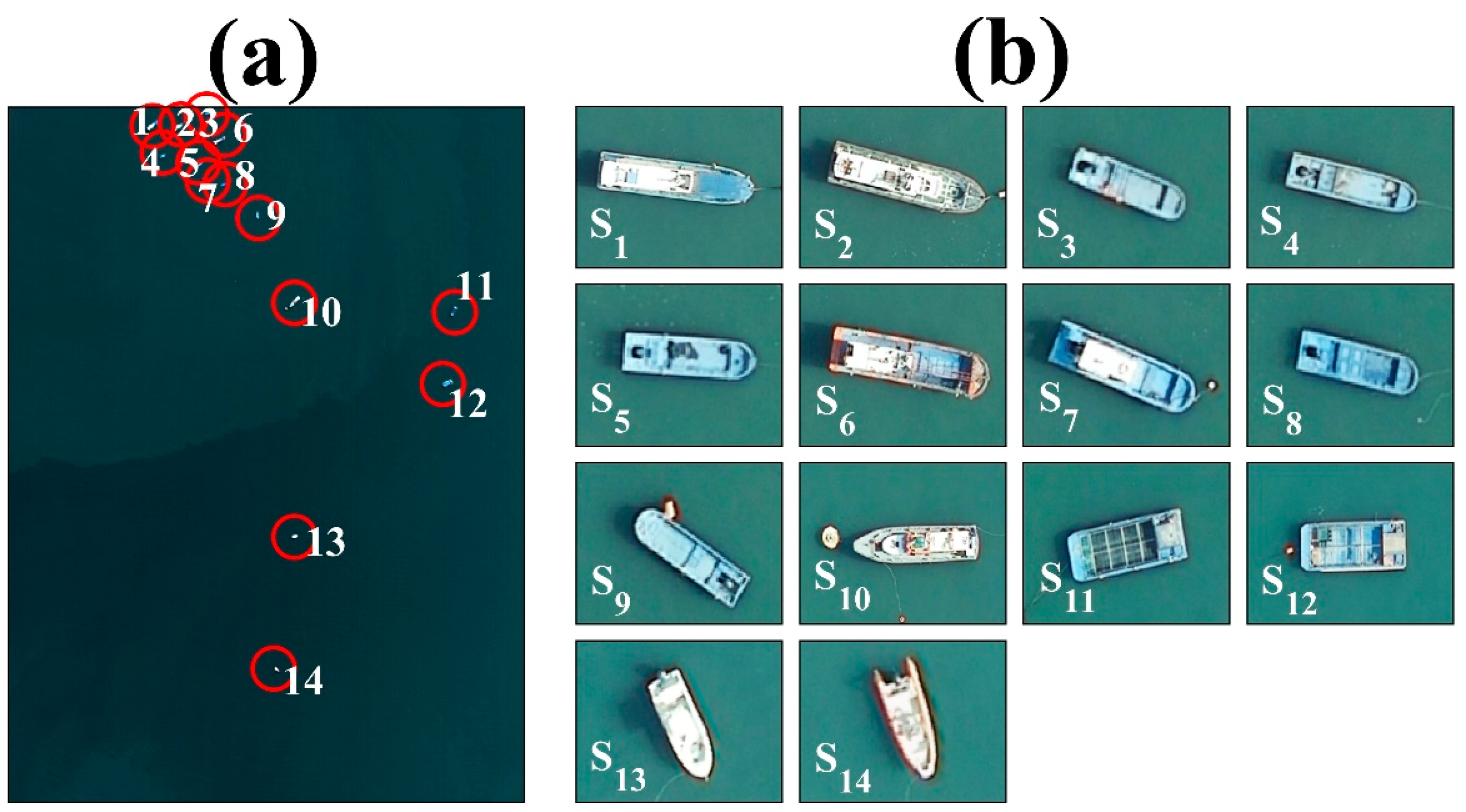
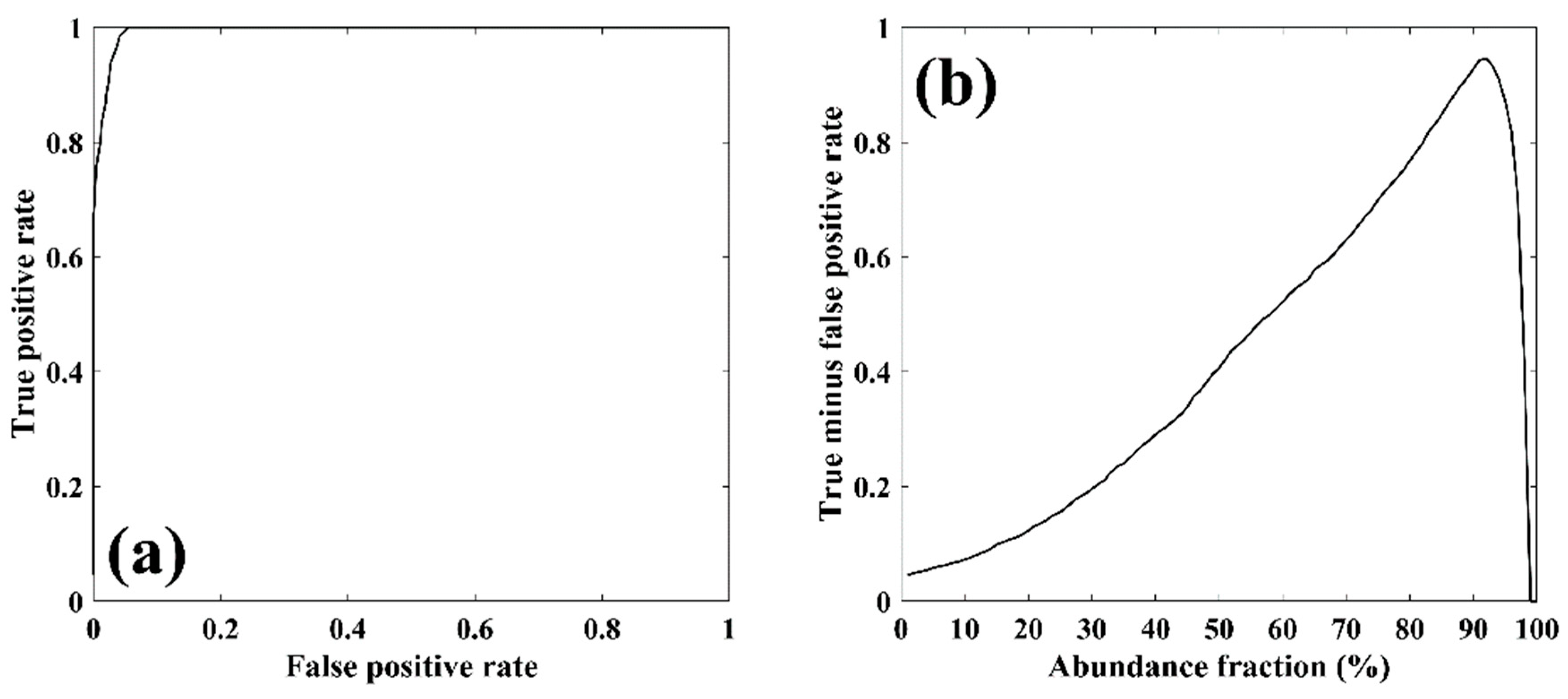
3.5. Accuracy Assessment of the Four Algorithms
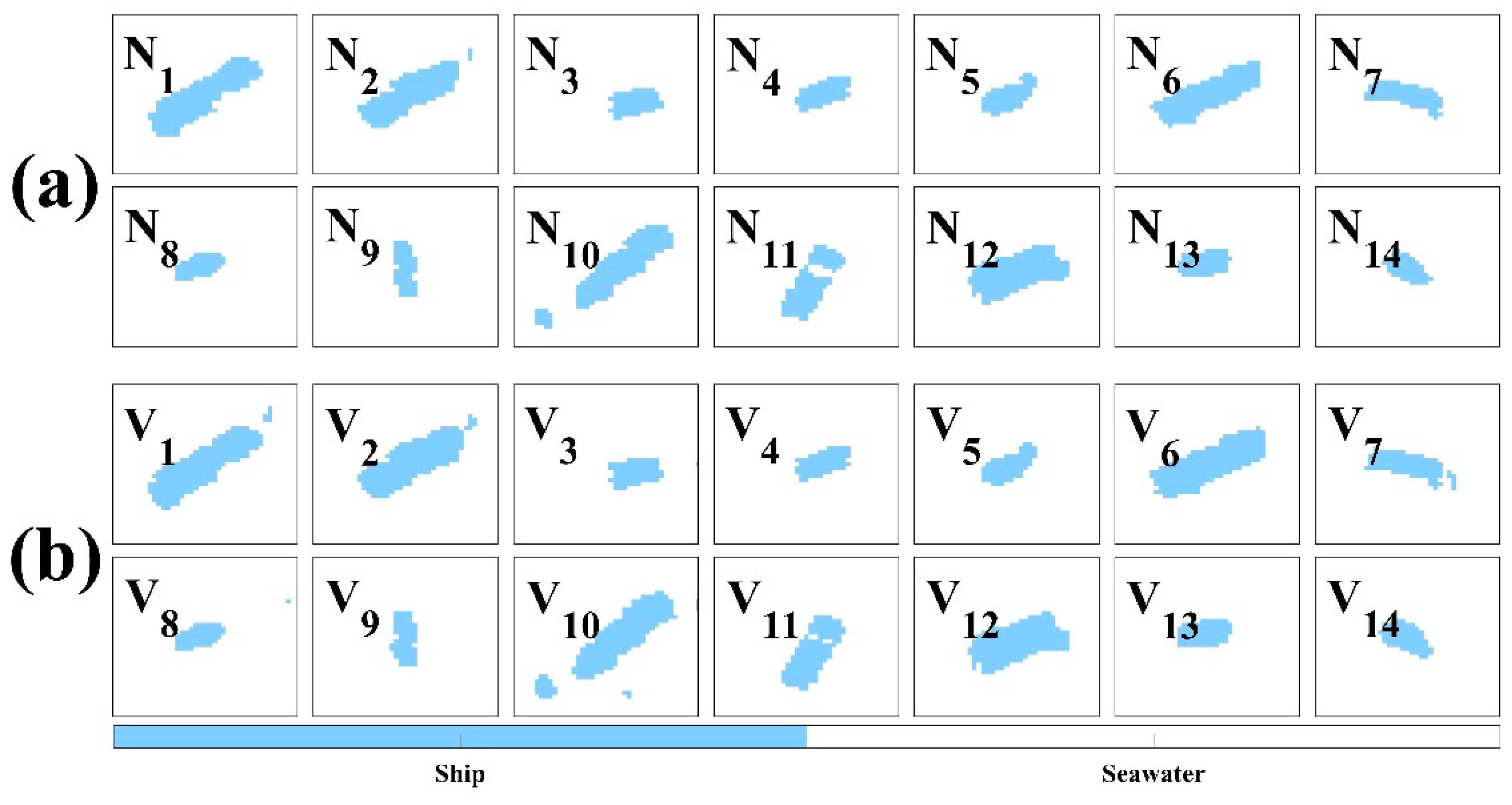
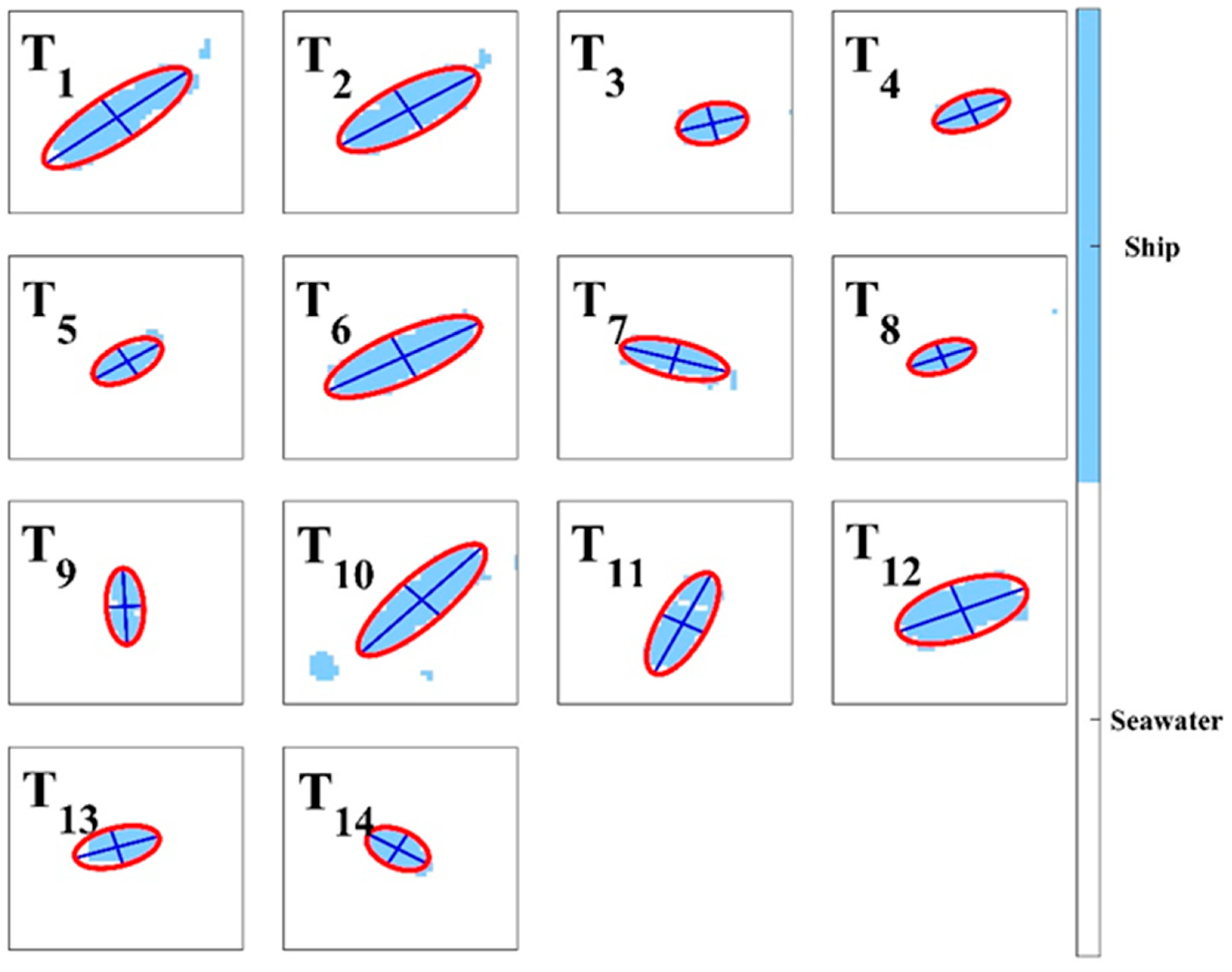
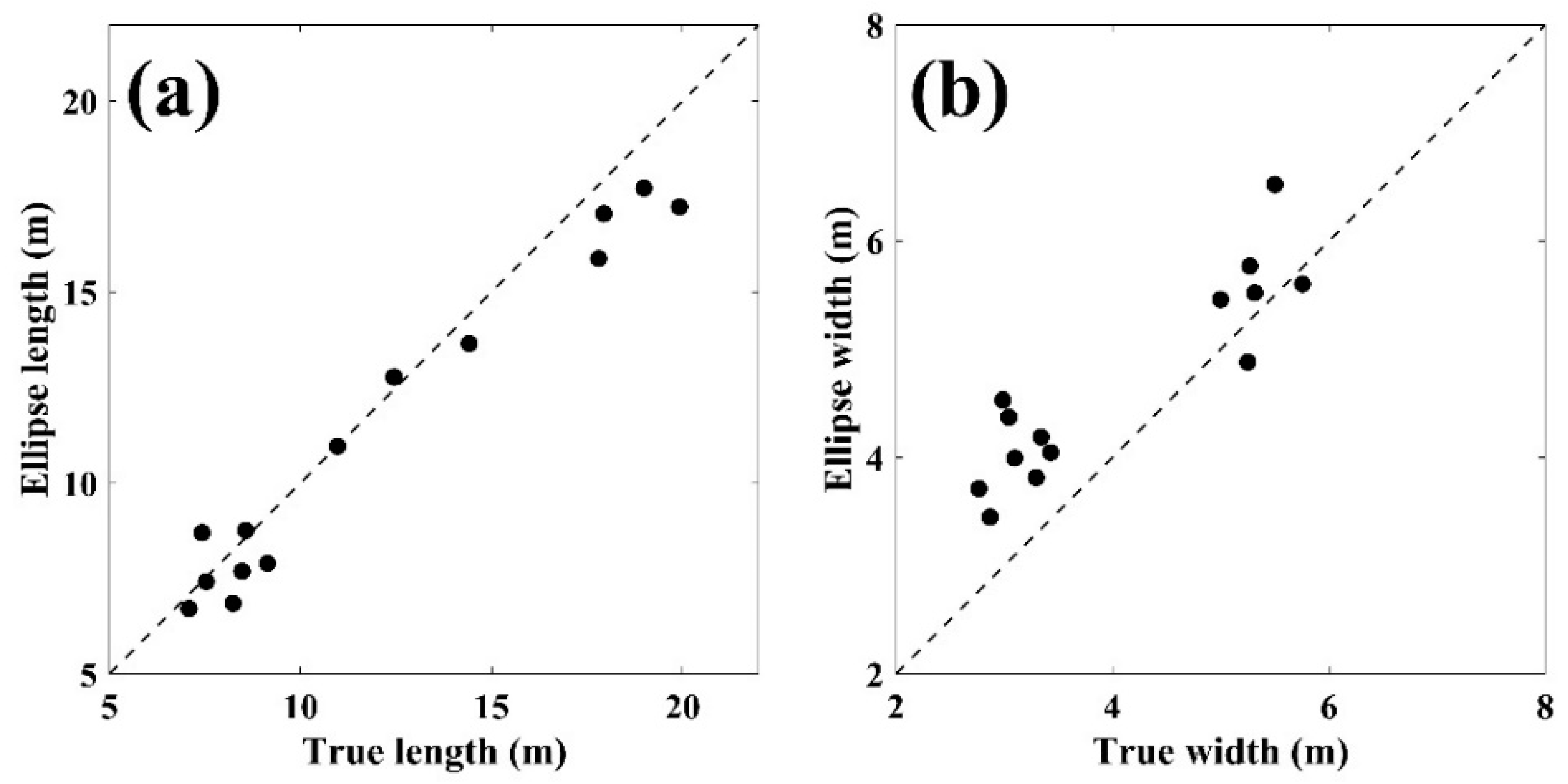
3.6. Estimation of Vessel Size Using the Ellipse Fitting Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cohen, J.E.; Small, C.; Mellinger, A.; Gallup, J.; Sachs, J. Estimates of coastal populations. Science 1997, 278, 1209–1213. [Google Scholar] [CrossRef]
- Small, C.; Nicholls, R.J. A global analysis of human settlement in coastal zones. J. Cosatal Res. 2003, 19, 584–599. [Google Scholar]
- Martínez, M.L.; Intralawan, A.; Vázquez, G.; Pérez-Maqueo, O.; Sutton, P.; Landgrave, R. The coasts of our world: Ecological, economic and social importance. Ecol. Econ. 2007, 63, 254–272. [Google Scholar] [CrossRef]
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2019, 207, 1–26. [Google Scholar] [CrossRef]
- McDonnell, M.J.; Lewis, A.J. Ship detection from LANDSAT imagery. Photogram Eng. Rem. Sens. 1978, 44, 291–301. [Google Scholar]
- Buck, H.; Sharghi, E.; Guilas, C.; Stastny, J.; Morgart, W.; Schalcosky, B.; Pifko, K. Enhanced ship detection from overhead imagery. In Optics and Photonics in Global Homeland Security IV; Halvorson, C.S., Lehrfeld, D., Saito, T.T., Eds.; SPIE: Washington, DC, USA, 2008. [Google Scholar] [CrossRef]
- Proia, N.; Pagé, V. Characterization of a Bayesian ship detection method in optical satellite images. IEEE Geosci. Remote Sens. 2009, 7, 226–230. [Google Scholar] [CrossRef]
- Johansson, P. Small Vessel Detection in High Quality Optical Satellite Imagery; Chalmers University of Technology: Goethenburg, Sweden, 2011. [Google Scholar]
- Vachon, P.W.; Campbell, J.W.M.; Bjerkelund, C.A.; Dobson, F.W.; Rey, M.T. Ship detection by the RADARSAT SAR: Validation of detection model predictions. Can. J. Remote Sens. 1997, 23, 48–59. [Google Scholar] [CrossRef]
- Tello, M.; Lopez-Martinez, C.; Mallorqui, J.; Bonastre, R. Automatic detection of spots and extraction of frontiers in SAR images by means of the wavelet transform: Application to ship and coastline detection. In Proceedings of the IEEE IGARSS, Denver, CO, USA, 31 July–4 August 2006. [Google Scholar] [CrossRef]
- Liu, C.; Gierull, C.H. A new application for PolSAR imagery in the field of moving target indication/ship detection. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3426–3436. [Google Scholar] [CrossRef]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship surveillance with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1092–1103. [Google Scholar] [CrossRef]
- Wang, S.; Wang, M.; Yang, S.; Jiao, L. New hierarchical saliency filtering for fast ship detection in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 55, 351–362. [Google Scholar] [CrossRef]
- Song, S.; Xu, B.; Yang, J. Ship detection in polarimetric sar images via variational bayesian inference. IEEE J-STARS 2017, 10, 2819–2829. [Google Scholar] [CrossRef]
- Wackerman, C.C.; Friedman, K.S.; Pichel, W.G.; Clemente-Colón, P.; Li, X.A. Automatic detection of ships in RADARSAT-1 SAR imagery. Can. J. Remote Sens. 2001, 27, 568–577. [Google Scholar] [CrossRef]
- Liao, M.; Wang, C.; Wang, Y.; Jiang, L. Using SAR images to detect ships from sea clutter. IEEE Geosci. Remote Sens. 2008, 5, 194–198. [Google Scholar] [CrossRef]
- An, W.; Xie, C.; Yuan, X. An improved iterative censoring scheme for CFAR ship detection with SAR imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4585–4595. [Google Scholar] [CrossRef]
- Brando, V.E.; Lovell, J.L.; King, E.A.; Boadle, D.; Scott, R.; Schroeder, T. The potential of autonomous ship-borne hyperspectral radiometers for the validation of ocean color radiometry data. Remote Sens. 2016, 8, 150. [Google Scholar] [CrossRef] [Green Version]
- Rostami, M.; Kolouri, S.; Eaton, E.; Kim, K. Deep transfer learning for few-shot sar image classification. Remote Sens. 2019, 11, 1374. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Shi, W.; Wang, J.; Yang, E.; Zhou, H. Enhanced feature extraction for ship detection from multi-resolution and multi-scene synthetic aperture radar (SAR) images. Remote Sens. 2019, 11, 2694. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Zhang, J.; Zhan, R. R2FA-Det: Delving into high-quality rotatable boxes for ship detection in SAR images. Remote Sens. 2020, 12, 2031. [Google Scholar] [CrossRef]
- Song, J.; Kim, D.J.; Kang, K.M. automated procurement of training data for machine learning algorithm on ship detection using ais information. Remote Sens. 2020, 12, 1443. [Google Scholar] [CrossRef]
- Hirano, A.; Madden, M.; Welch, R. Hyperspectral image data for mapping wetland vegetation. Wetlands 2003, 23, 436–448. [Google Scholar] [CrossRef]
- Pengra, B.W.; Johnston, C.A.; Loveland, T.R. Mapping an invasive plant, Phragmites australis, in coastal wetlands using the EO-1 Hyperion hyperspectral sensor. Remote Sens. Environ. 2007, 108, 74–81. [Google Scholar] [CrossRef]
- Zomer, R.J.; Trabucco, A.; Ustin, S.L. Building spectral libraries for wetlands land cover classification and hyperspectral remote sensing. J. Environ. Manag. 2009, 90, 2170–2177. [Google Scholar] [CrossRef] [PubMed]
- Prospere, K.; McLaren, K.; Wilson, B. Plant species discrimination in a tropical wetland using in situ hyperspectral data. Remote Sens. 2014, 6, 8494–8523. [Google Scholar] [CrossRef] [Green Version]
- Griffin, M.K.; Burke, H.H.K. Compensation of hyperspectral data for atmospheric effects. Linc. Lab. J. 2003, 14, 29–54. [Google Scholar]
- Gao, B.C.; Montes, M.J.; Ahmad, Z.; Davis, C.O. Atmospheric correction algorithm for hyperspectral remote sensing of ocean color from space. Appl. Opt. 2000, 39, 887–896. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.C.; Montes, M.J.; Davis, C.O.; Goetz, A.F. Atmospheric correction algorithms for hyperspectral remote sensing data of land and ocean. Remote Sens. Environ. 2009, 113, 17–24. [Google Scholar] [CrossRef]
- Kruse, F.A.; Boardman, J.W.; Huntington, J.F. Comparison of airborne hyperspectral data and EO-1 Hyperion for mineral mapping. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1388–1400. [Google Scholar] [CrossRef] [Green Version]
- Neville, R.A.; Levesque, J.; Staenz, K.; Nadeau, C.; Hauff, P.; Borstad, G.A. Spectral unmixing of hyperspectral imagery for mineral exploration: Comparison of results from SFSI and AVIRIS. Can. J. Remote Sens. 2003, 29, 99–110. [Google Scholar] [CrossRef]
- Bishop, C.A.; Liu, J.G.; Mason, P.J. Hyperspectral remote sensing for mineral exploration in Pulang, Yunnan Province, China. Int. J. Remote Sens. 2011, 32, 2409–2426. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [Green Version]
- Brando, V.E.; Dekker, A.G. Satellite hyperspectral remote sensing for estimating estuarine and coastal water quality. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1378–1387. [Google Scholar] [CrossRef]
- Randolph, K.; Wilson, J.; Tedesco, L.; Li, L.; Pascual, D.L.; Soyeux, E. Hyperspectral remote sensing of cyanobacteria in turbid productive water using optically active pigments, chlorophyll a and phycocyanin. Remote Sens. Environ. 2008, 112, 4009–4019. [Google Scholar] [CrossRef]
- Wang, Z.; Yin, Q.; Li, H.; Hu, B. Surface ship target detection in hyperspectral images based on improved variance minimum algorithm. In Proceedings of the SPIE 10033, Eighth International Conference on Digital Image Processing (ICDIP 2016), Chengu, China, 20–22 May 2016. [Google Scholar] [CrossRef]
- Yan, L.; Noro, N.; Takara, Y.; Ando, F.; Yamaguchi, M. Using hyperspectral image enhancement method for small size object detection on the sea surface. In Proceedings of the SPIE 9643, Image and Signal Processing for Remote Sensing XXI, 96430H, Toulouse, France, 15 October 2015. [Google Scholar] [CrossRef]
- Park, J.J.; Oh, S.; Park, K.A.; Foucher, P.Y.; Jang, J.C.; Lee, M.; Kang, W.S. The Ship Detection Using Airborne and In-situ Measurements Based on Hyperspectral Remote Sensing. J. Korean Earth Sci. Soc. 2017, 38, 535–545. [Google Scholar] [CrossRef]
- Farrell, M.D.; Mersereau, R.M. On the impact of PCA dimension reduction for hyperspectral detection of difficult targets. IEEE Geosci. Remote Sens. 2005, 2, 192–195. [Google Scholar] [CrossRef]
- Luo, G.; Chen, G.; Tian, L.; Qin, K.; Qian, S.E. Minimum noise fraction versus principal component analysis as a preprocessing step for hyperspectral imagery denoising. Can. J. Remote Sens. 2016, 42, 106–116. [Google Scholar] [CrossRef]
- Koonsanit, K.; Jaruskulchai, C.; Eiumnoh, A. Band selection for dimension reduction in hyper spectral image using integrated information gain and principal components analysis technique. Int. J. Mach. Learn. Comput. 2012, 2, 248. [Google Scholar] [CrossRef]
- Winter, M.E. N-FINDR: An Algorithm for Fast Autonomous Spectral End-Member Determination in Hyperspectral Data; Descour, M.R., Shen, S.S., Eds.; Imaging Spectrometry V.: Denver, CO, USA, 1999; Volume 3753, pp. 266–275. [Google Scholar] [CrossRef]
- Xiong, W.; Chang, C.I.; Wu, C.C.; Kalpakis, L.; Chen, H.M. Fast algorithms to implement N-FINDR for hyperspectral endmember extraction. IEEE J. STARS 2011, 4, 545–564. [Google Scholar] [CrossRef]
- Park, J.J.; Oh, S.; Park, K.A.; Kim, T.S.; Lee, M. Applying hyperspectral remote sensing methods to ship detection based on airborne and ground experiments. Int. J. Remote Sens. 2020, 41, 5928–5952. [Google Scholar] [CrossRef]
- Boardman, J.W.; Kruse, F.A.; Green, R.O. Mapping Target Signatures via Partial Unmixing of AVIRIS Data. In Summaries of the Fifth JPL Airborne Earth Science Workshop; JPL Publication 95–1; NASA Jet Propulsion Laboratory: Pasadena, CA, USA, 1995. [Google Scholar]
- Chaudhry, F.; Wu, C.C.; Liu, W.; Chang, C.I.; Plaza, A. Pixel purity index-based algorithms for endmember extraction from hyperspectral imagery. In Recent Advances in Hyperspectral Signal and Image Processing; Transworld Research Network: Kerala, India, 2006; Volume 37, pp. 29–62. [Google Scholar]
- Wang, J.; Chang, C.I. Independent component analysis-based dimensionality reduction with applications in hyperspectral image analysis. IEEE Trans. Geosci. Remote Sens. 2006, 46, 1586–1600. [Google Scholar] [CrossRef]
- Nascimento, J.M.; Dias, J.M. Does independent component analysis play a role in unmixing hyperspectral data? IEEE Trans. Geosci. Remote Sens. 2005, 43, 175–187. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Nascimento, J.M.P. Estimation of signal subspace on hyperspectral data. Proc. SPIE 2005, 5982, 59820L. [Google Scholar]
- Nascimento, J.M.; Dias, J.M. Vertex component analysis: A fast algorithm to unmix hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 898–910. [Google Scholar] [CrossRef] [Green Version]
- Lopez, S.; Horstrand, P.; Callico, G.M.; Lopez, J.F.; Sarmiento, R. A low-computational-complexity algorithm for hyperspectral endmember extraction: Modified vertex component analysis. IEEE Geosci. Remote Sens. 2011, 9, 502–506. [Google Scholar] [CrossRef]
- Heinz, D.C. Fully constrained least squares linear spectral mixture analysis method for material quantification in hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 529–545. [Google Scholar] [CrossRef] [Green Version]
- Park, K.A.; Woo, H.J.; Ryu, J.H. Spatial scales of mesoscale eddies from GOCI Chlorophyll-a concentration images in the East/Japan Sea. Ocean Sci. J. 2012, 47, 347–358. [Google Scholar] [CrossRef]
- Kerekes, J. Receiver operating characteristic curve confidence intervals and regions. IEEE Geosci. Remote Sens. 2008, 5, 251–255. [Google Scholar] [CrossRef] [Green Version]
- Park, J.J.; Park, K.A.; Foucher, P.Y.; Lee, M.; Oh, S. Estimation of ship size from satellite optical image using elliptic characteristics of ship periphery. Int. J. Remote Sens. 2020, 41, 5905–5927. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instruments | Characteristics | Specifications |
|---|---|---|
| Cessna Grand Caravan 208B | Width (m) | 15.9 |
| Length (m) | 12.7 | |
| Height (m) | 4.7 | |
| Max takeoff weight (kg) | 3969 | |
| Takeoff run (m) | 354 | |
| Landing run (m) | 227 | |
| Endurance | 5 hr 30 min | |
| AisaEAGLE Hyperspectral sensor | Spectral range (nm) | 400−900 |
| Spectral resolution (m) | Min 3.3 | |
| Spatial resolution (m) | 0.58 | |
| Spatial pixels | 1024 | |
| Spectral channel | 127 | |
| SNR | 1250:1 |
| Correlation | Endmember-1 | Endmember-2 | Endmember-3 | Endmember-4 |
|---|---|---|---|---|
| Gray deck | 0.50 | −0.02 | 0.51 | −0.06 |
| White deck | 0.53 | 0.01 | 0.49 | −0.03 |
| Red deck | 0.01 | 0.54 | −0.56 | −0.25 |
| Green deck | 0.25 | −0.19 | 0.41 | 0.28 |
| Blue deck | −0.15 | −0.43 | 0.28 | 0.60 |
| Seawater | 0.40 | −0.19 | 0.59 | −0.01 |
| Orange rubber | 0.15 | 0.60 | −0.50 | −0.30 |
| Method | S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | S11 | S12 | S13 | S14 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N-FINDR | 85.96 | 88.23 | 72.52 | 77.27 | 82.75 | 100 | 80.56 | 75.34 | 86.76 | 82.16 | 78.71 | 89.52 | 92.96 | 100 |
| VCA | 93.61 | 100 | 78.02 | 78.40 | 85.06 | 100 | 90.74 | 75.34 | 95.59 | 100 | 90.32 | 94.29 | 100 | 100 |
| PPI | 0.06 | 47.56 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| ICA | 35.32 | 0 | 0 | 0 | 0 | 26.82 | 20.37 | 0 | 0 | 31.92 | 0 | 0 | 60.56 | 63.46 |
| Total | 93.61 | 100 | 78.02 | 78.04 | 85.06 | 100 | 91.67 | 75.34 | 95.59 | 100 | 91.61 | 94.29 | 100 | 100 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.-J.; Kim, T.-S.; Park, K.-A.; Oh, S.; Lee, M.; Foucher, P.-Y. Application of Spectral Mixture Analysis to Vessel Monitoring Using Airborne Hyperspectral Data. Remote Sens. 2020, 12, 2968. https://doi.org/10.3390/rs12182968
Park J-J, Kim T-S, Park K-A, Oh S, Lee M, Foucher P-Y. Application of Spectral Mixture Analysis to Vessel Monitoring Using Airborne Hyperspectral Data. Remote Sensing. 2020; 12(18):2968. https://doi.org/10.3390/rs12182968
Chicago/Turabian StylePark, Jae-Jin, Tae-Sung Kim, Kyung-Ae Park, Sangwoo Oh, Moonjin Lee, and Pierre-Yves Foucher. 2020. "Application of Spectral Mixture Analysis to Vessel Monitoring Using Airborne Hyperspectral Data" Remote Sensing 12, no. 18: 2968. https://doi.org/10.3390/rs12182968
APA StylePark, J. -J., Kim, T. -S., Park, K. -A., Oh, S., Lee, M., & Foucher, P. -Y. (2020). Application of Spectral Mixture Analysis to Vessel Monitoring Using Airborne Hyperspectral Data. Remote Sensing, 12(18), 2968. https://doi.org/10.3390/rs12182968