1. Introduction
The multipath effect is one of the major source of errors in precise Global Navigation Satellite System (GNSS) positioning. This effect occurs when the receiver registers not only direct signals from the satellite but also indirect signals, reflected from the ground or other terrain obstacles. The properties of such signals are significantly different compared to direct signals. Indirect signals always cover a longer distance, reaching the receiver with a certain delay, and are in a different phase in relation to the direct signal. As a result of reflection, the amplitude of the wave (and possibly its polarization and frequency as well) also changes [
1]. Since the receiver cannot distinguish between direct and reflected signals, the two waves interfere and the form of the direct signal is distorted. This results in code and phase observation errors as well as distortions of the Signal-to-Noise Ratio (SNR) parameter [
2,
3].
The maximum multipath impact on the carrier wave phase accuracy is defined as a quarter of the wavelength [
4]. This corresponds to approximately 5 cm for the frequencies used in GNSS systems. On the other hand, the impact of this effect on the measurement of the code pseudorange can be much greater. Under exceptionally unfavorable conditions, it can be as high as 100 m [
5]. In practice, however, the use of precise measurement equipment minimizes such errors. The multipath impact on double-differenced (DD) carrier-phase observations has a value of up to 0.1 of the phase cycle, i.e., approximately 2 cm [
6]. The value of the code multipath error is approximately 2 m [
7]. Importantly, the accuracy of precise positioning does not depend solely on the accuracy of the phase measurements. It is the code observations that have a significant impact on the results of the float solution.
The value of the multipath error depends on the nearest antenna environment. Due to the extremely local nature of this phenomenon, its impact cannot be eliminated by differential observations or by universal models describing the magnitude of this error. For this reason, the multipath effect is one of the most crucial factors among all errors in GNSS measurements, and the determination of its impact is a difficult and challenging task.
The methods of elimination and identification of the multipath impact can be divided into three groups [
5]: (a) elimination of the multipath effect as part of data postprocessing, (b) hardware methods at the stage of signal measurement, and (c) the appropriate selection of the place of measurement.
An obvious way to reduce the multipath is to select a suitable location to take the measurements, away from terrain obstacles. In addition, placing the antenna directly on the ground can limit the possibility of the reception of waves reflected from the surface. This solution obviously has its limitations and can rarely be used in practice. Another option may be to use a horizontal elevation mask, adjusted to the actual environment of the antenna [
8]. This allows for a partial reduction in the reception of signals that is highly likely to be affected by the multipath effect. Zimmermann et al. [
9] proposed an elaboration of this method, using assumptions related to the radio wave propagation area and the Fresnel zone. This approach results in better determination of the wave ambiguity. In the examined case, the ambiguity success rate increased from 95.5% to 99.9%.
Hardware methods include those related to the construction of the antenna and the receiver. GNSS antenna designs are based on signal polarization, allowing for wave attenuation with left-handed polarization (which is the typical polarization of reflected waves). In turn, the use of choke-ring antennas or antennas with increasing electrical resistance allows for additional protection against receiving surface waves of the signal reflected from the ground [
10,
11].
The multipath effect can be significantly reduced at the stage of signal registration by the receiver. A carefully selected signal correlation technique or distance between correlators significantly reduces the impact of signal distortions related to the multipath effect. An overview of such signal correlation methods, commonly used by measurement equipment manufacturers, was presented by Kalyanaraman [
12].
The broadest group of methods for determining the multipath effect is methods related to data postprocessing. An important feature used in multipath analyses is the correlation of this phenomenon with the values of the SNR parameter. This correlation results from the fact that the presence of secondary waves in the registered signal affects the change in its amplitude. This correlation is used for modelling the SNR parameter in order to identify the main source of signal reflections. The resulting adjustments to the phase observations allow for a reduction in residual errors of the DD carrier-phase observations by 25% [
13]. Comp and Axelrad [
14] presented a method to analyze changes in the SNR parameter, allowing for a reduction of the value of this error by up to 47%. In both papers, the multipath impact on the DD carrier-phase observations was determined at the level of approximately 1 cm.
In order to isolate the multipath impact on the accuracy of code observations from other measurement errors, the Code-Minus-Carrier (CMC) combination of code and phase observations was used [
15].
On the other hand, an analysis of a feature related to the repetitiveness of the multipath characteristics with repetition of the satellite constellation, every sidereal day, was performed [
16]. The differences in Global Positioning System (GPS) observations between two consecutive days allows for obtaining a series of code observations with an error due to the multipath effect at the level of 0.06–0.08 m, instead of approximately 0.5 m for undifferenced observations.
Due to the close relationship between the multipath effect and the position of the satellites, the phenomenon is characterized by variability resulting from the movement of the satellites. The typical multipath period for GPS, under typical conditions, is approximately 15 min [
4]. In turn, Pugliano et al. [
17], quoting Tranquilla and Carr [
18], pointed to the different multipath periods depending on the type of signal reflections. Long-period phenomena, with frequencies of 1–3 mHz, correspond to specular reflections of the signal, while short-period phenomena (5–20 mHz) are characterized by diffuse reflections. The authors used these features to determine the impact of both types of reflections on the accuracy of the code observations. A time-frequency analysis of the signal was conducted by the authors using the wavelet transform. In the examined case, the standard deviation (STD) of the multipath error for code observations due to specular reflections was 0.10 m, while for diffuse reflections, this value was 0.05 m. Wavelet analysis allows for the separation of components with frequencies typical of the multipath effect and measurement noise with a much higher frequency, from DD phase observations [
6]. In turn, Robustelli and Pugliano [
19] used Short Time Fourier Transform (STFT) in time-frequency analyses of time series of a CMC combination.
Another method that allows for the elimination of the multipath is the analysis of the SNR parameter for signals at several different carrier wave frequencies. This method takes advantage of the fact that the relative phase of the secondary signal varies depending on the frequency of the measured signal [
20].
The multipath effect can also be determined using a set of antennas located in close proximity (multi-antenna). Such an approach allows for modelling the reflector position and introducing corrections to the observations. The adjusted code observations have their error reduced by 65%, while the error of the determined coordinates is reduced by 55% [
7].
Over the past several years, multipath error analysis has been performed for Multi-GNSS solutions (GPS, GLONASS, Galileo, and BeiDou) [
21] as well as single-system solutions: BeiDou (e.g., [
22,
23]) and Galileo (e.g., [
2,
24,
25,
26]). The analysis demonstrates the superiority of the Galileo code observations, especially the E5 AltBOC signal, over GPS observations as well as BeiDou and GLONASS systems (RMS of code multipath and noises for E5 Galileo equal to 0.1 cm, whereas for signals of other GNSS systems, the value of this error ranges from 0.2 to 0.4 m). The largest multipath errors were recorded for GLONASS observations.
The Galileo system was designed with improved features compared to the GPS system. One of the improvements consists of a greater accuracy of code observations, especially in terms of the resistance to the multipath effect. The appropriate selection of the structure of the navigation signal can effectively increase the efficiency of a given signal type under conditions of increased multipath impact as well as measurement noise. Through the use of novel modulation techniques, the signal adopts certain characteristics that make measurement processing in the receiver more resistant to various types of disturbances, including those related to the multipath effect [
27].
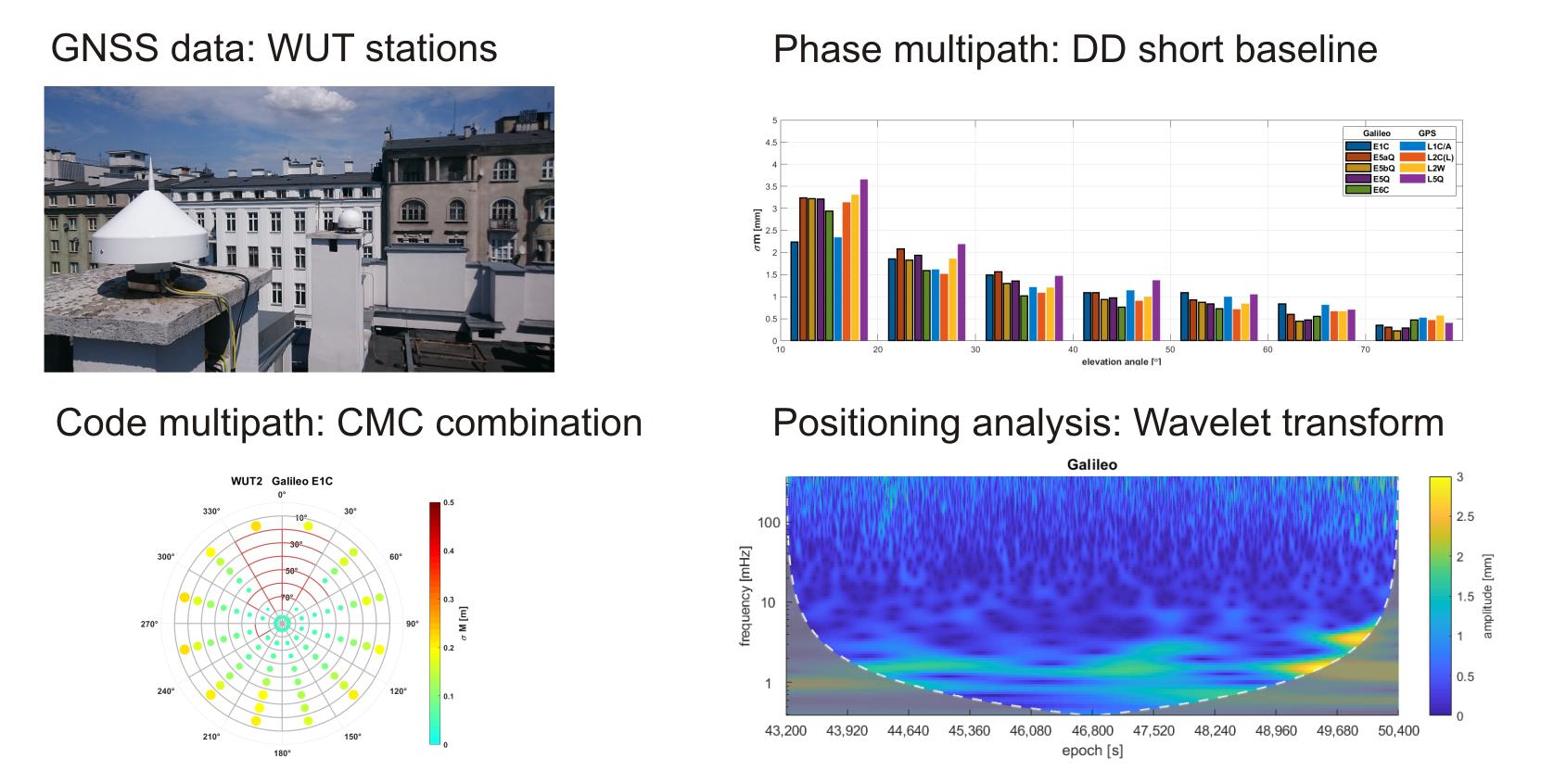
The main objective of this paper is to determine the multipath impact on Galileo measurements and to compare the results to GPS measurements. The analyses of the multipath effect were determined based on code observations, carrier-phase observations, and positioning results. The main objective of the experiment was the determination of multipath errors for observations in the statistical domain, taking into account measurement noise and its time correlation. Positioning results as well as observations were analyzed by also using the wavelet transform. Code multipath error was determined using CMC combination, and phase multipath error was determined using the measurements for a very short baseline. In this paper, a comparative analysis of the impact of multipath on Galileo and GPS measurements is presented in a comprehensive way, using all available signals of both systems. The provided research allows us to verify whether the Galileo system does indeed offer improvements in terms of its resistance to the multipath effect compared to the GPS system. The comparison of the results for the Galileo system to GPS was dictated by the fact that almost all multi-system solutions use the latter. Additionally, it is also an operational system that has been in use for the longest period of time and has been the subject of extensive research on GNSS.
The paper is organized as follows.
Section 2 presents the Galileo system, especially in terms of the increased resistance of the observations to the multipath effect.
Section 3 describes the methodology used for the determination of the multipath impact, which were adopted in this paper.
Section 4 is devoted to the analysis of the multipath effect on code observations, carrier-phase observations, and estimated receiver positions.
Section 5 contains a discussion and the most important results. Finally, in
Section 6, the conclusions and possible future work are presented.
2. Multipath for Galileo
The Galileo system is currently in its final construction stage and is close to achieving full operational capability with a target number of 30 satellites in the constellation. The current constellation comprises 22 fully operational satellites [
28]. This ensures the visibility of at least five satellites at every point on the globe [
29]. The constant development of the system makes its use increasingly widespread. Observations obtained using this system are used not only by advanced geodetic receivers but also increasingly often by mobile receivers. The growing popularity of the system can also be explained by a variety of civil signals that it uses. Galileo satellites transmit signals on four frequency bands intended for civilian users. Each signal has two additional channels: one for navigation data and a pilot channel without this data. The addition of a pilot channel is to increase the sensitivity of code tracking under increased signal interference conditions [
30].
The civilian signal on the E1 frequency is transmitted using the Composite Binary Offset Carrier modulation technique: CBOC(6,1,1/11) [
31]. The use of Binary Offset Carrier (BOC) modulation derivatives guarantees a higher quality of observation under the conditions of increased signal interference in relation to the legacy code C/A of the GPS system as well as ensures interoperability between different GNSS systems using the same radio frequency bands [
27]. Research on the selection of the appropriate signal type for the Galileo satellites was carried out as part of the GIOVE test missions. The CBOC technique used for the Galileo E1 signal allow us to increase the accuracy of code observations by 20–25% relative to BOC(1,1), which has similar characteristics to the Binary Phase Shift Keying (BPSK(1)) signal of the GPS C/A code [
25]. For a 5° satellite elevation, the code multipath error for a CBOC signal was approximately 0.6 m, while for BOC(1,1), it was 0.9 m.
Signals at E5a and E5b frequencies can be recorded as independent observations using BPSK(10) modulation techniques. However, these signals modulate the carrier wave at E5 frequency using the Alternative BOC (AltBOC) method, thereby creating a signal with a very wide frequency bandwidth [
32]. In theory, this signal is supposed to offer the greatest resistance to the multipath effect and measurement noise. Analyses for all Galileo signals, transmitted by GIOVE-A satellite, indicate smaller values of the multipath error compared to the C/A GPS code [
26]. The STD of the multipath error for the C/A GPS signal was determined at the level of 1.2 m for a satellite elevation less than 10° and of 0.6 m for an elevation above 10°. For the Galileo signals, the STD values were 0.5 m and 0.3 m for E5a, 0.5 m and 0.3 m for E5b, 0.2 m and 0.2 m for E5, and 0.5 m and 0.3 m for E6, which is used in the High Accuracy Service (results for elevations lower and higher than 10°, respectively).
Multipath error analyses for code observations at International GNSS Service (IGS) stations, based on CMC analysis as well as the wavelet analysis, also prove the superiority of Galileo observations over GPS C/A code [
24]. The smallest value of error was obtained for the E5 AltBOC signal. Irsigler [
2] presented a theoretical compilation of multipath errors for both code and phase observations of the GPS and Galileo systems using a GNSS signal generator. For the most unfavorable simulation conditions, the E5 AltBOC signal turned out to be even several times more resistant to the impact of multipath than the other tested signals: 0.2 m relative to 1.0 m for E5a/E5b, 0.6 m for E6, and over 1 m for E1 for the Double-Delta correlation technique [
33]. In the case of phase multipath, the differences between the signals are solely due to the different carrier wavelengths, and the modulation technique used does not affect the quality of the phase observations.
It has to be noted that the cited analysis contains the expected multipath errors, determined based on multipath error envelopes and a generated rather than actual signal, the nature of which may be much more complex and impossible to model using deterministic models in the GNSS hardware simulator. The presented analyses do not include a comprehensive comparison of the multipath effect for Galileo and GPS, using identical analysis methods for identical measurement conditions and taking into account the impact of measurement noise and its time correlation. Available research on the multipath effect also does not include analyses of the impact of this phenomenon on positioning solution.
4. Multipath Analysis
The experiment was conducted using observations captured by two stations, located on the roof of the Main Building of the Warsaw University of Technology: WUT1 and WUT2, 4.75 m apart. Both stations are located in a typical environment for reference stations. Measurements were recorded using Septentrio PolaRx5 receivers connected to a Leica Choke-Ring AT504 antenna at WUT1 and a Septentrio PolaNt ChokeRing B3/E6 at WUT2 (see
Figure 1). GPS and Galileo raw data collected on 29 June 2018 (180 DOY) at 1 Hz rate were used. There have not been many changes in the GPS and Galileo constellations since then, so the results obtained can be considered up-to-date.
The types of observations analyzed here are summarized in
Table 1. The signals analyzed include Galileo signals on all available civilian frequencies and band E6. All observations concern pilot channels without navigation data. For GPS, a C/A code, a signal on the L5 frequency (also in the form of a pilot channel) as well as two observations on the L2 frequency: a civilian signal L2C(L) (long code of the pilot channel) and an observation of a precise P code, using the Z-tracking method (L2W), were recorded.
The multipath effect for code observations was determined using CMC combination. On the basis of Equation (
9), combinations for E1C and L1C/A were determined using E5a and L2C(L) signals, respectively, as observations
, and where this was not possible, the L2W signal was used. For the remaining observations, Equation (
10) was used, using E1C and L1C/A observations as
. The CMC series determined in this way were filtered using a moving average, for
. The moving average acts as a low-pass filter. Such a value of the
k parameter, which at an observation interval of 1 s gives a period of approximately 35 min, allows for the elimination of not only the impact of ambiguity but also hardware biases [
24].
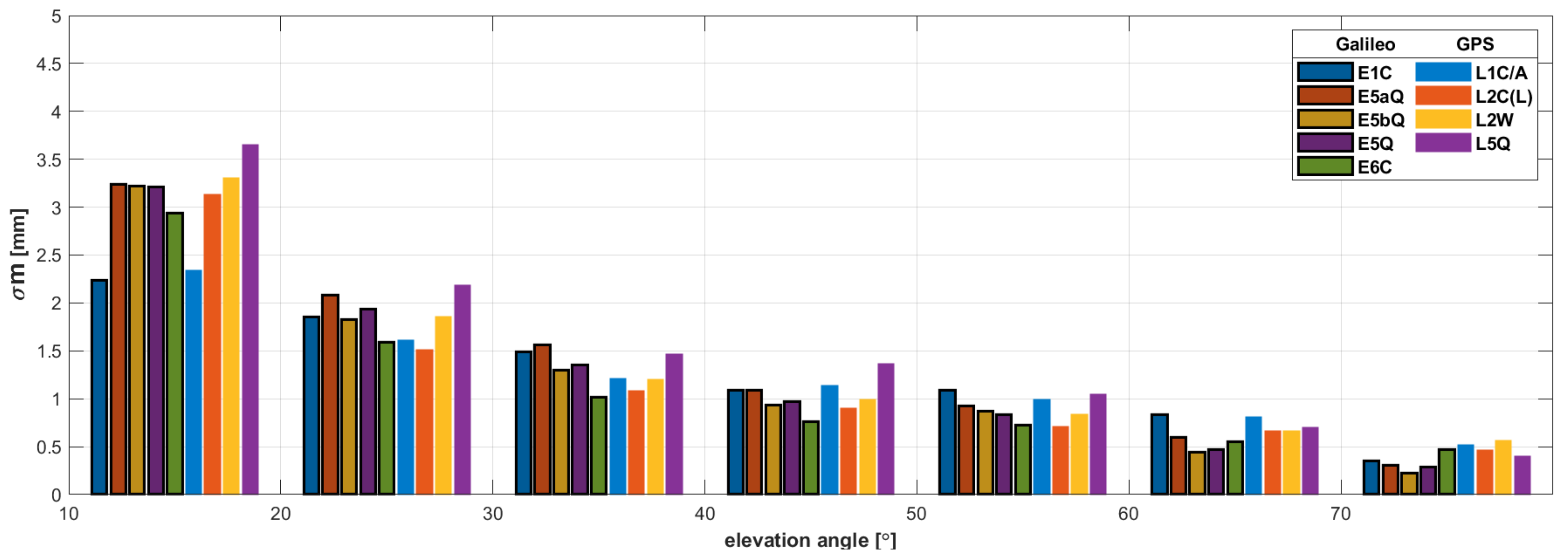
The determined values of the STD of the multipath impact on code observations (see Equation (
19)), depending on the satellite elevation are presented in
Figure 2. The statistics were calculated for 10-degree elevation bins, starting from an elevation mask of 10°. The obtained results concern observations recorded by the WUT2 station. The STD of the multipath effect are very close to each other, with two apparent exceptions. The smallest values, for all elevation bins, were obtained for the E5 AltBOC observation. The highest error values, in turn, were obtained for the L2W observation, which may be influenced by the specificity of tracking this observation, related to SNR degradation and its impact on the observation tracking accuracy. For other types of observations, for the lowest elevation bin, the multipath impact on Galileo turns out to be only marginally smaller than that for GPS. It is likely that, if the observations were recorded in an environment more susceptible to the multipath effect, much larger differences for the different signal types would be visible. The graph shows the general correlation between the magnitude of the multipath and the satellite elevation.
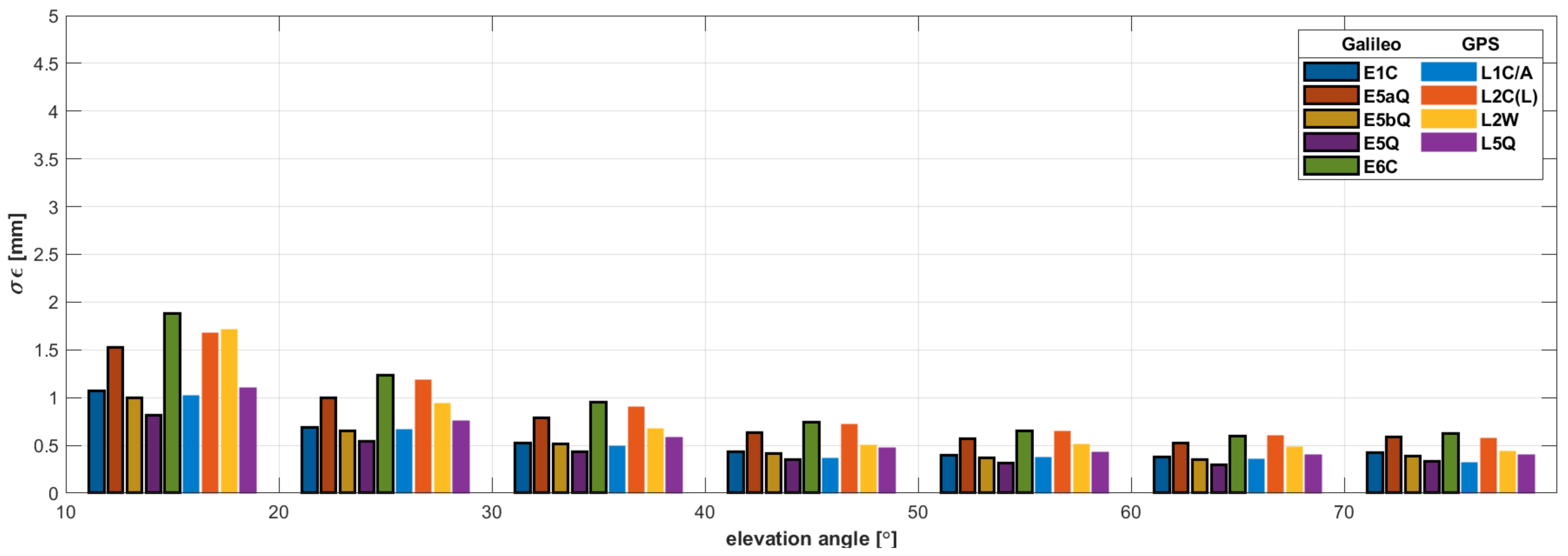
Figure 3 shows the STD of measurement noise, determined on the basis of Equation (
18). In this case, much larger discrepancies between given observations are visible. Again, the observation type that stands out is the E5 AltBOC signal, for which the obtained noise values are much smaller. Galileo observations have better measurement noise properties than GPS observations. Only in the case of the modernized L5 observation are the obtained results comparable to that of the Galileo system.
Since the correlation between the multipath impact on code observations and the elevation of satellites is evident, a model was designed to describe it in the form of a polynomial of the third degree. The general equation can be formulated as follows:
where
is the model value of
,
a is the model parameters, and
x is the value of the variable (satellite elevation).
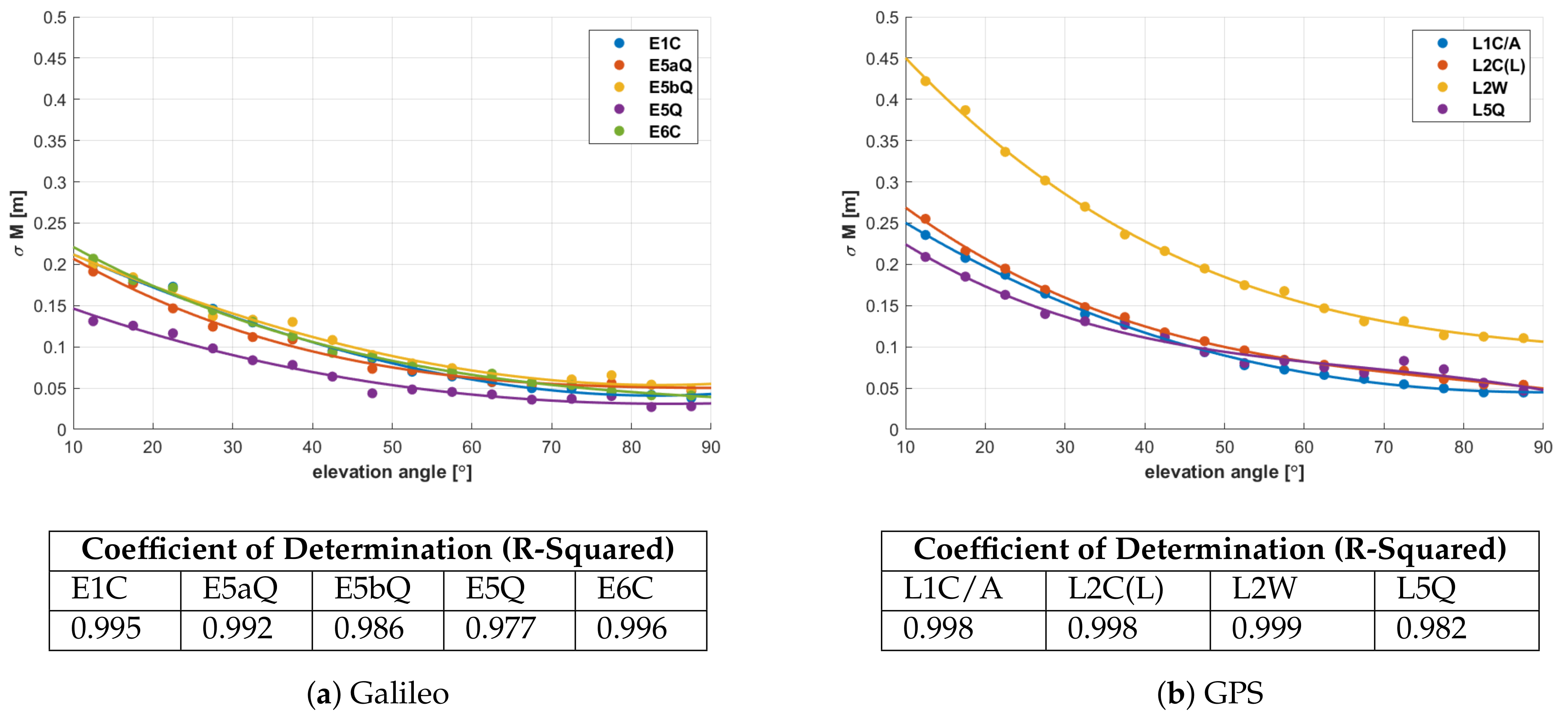
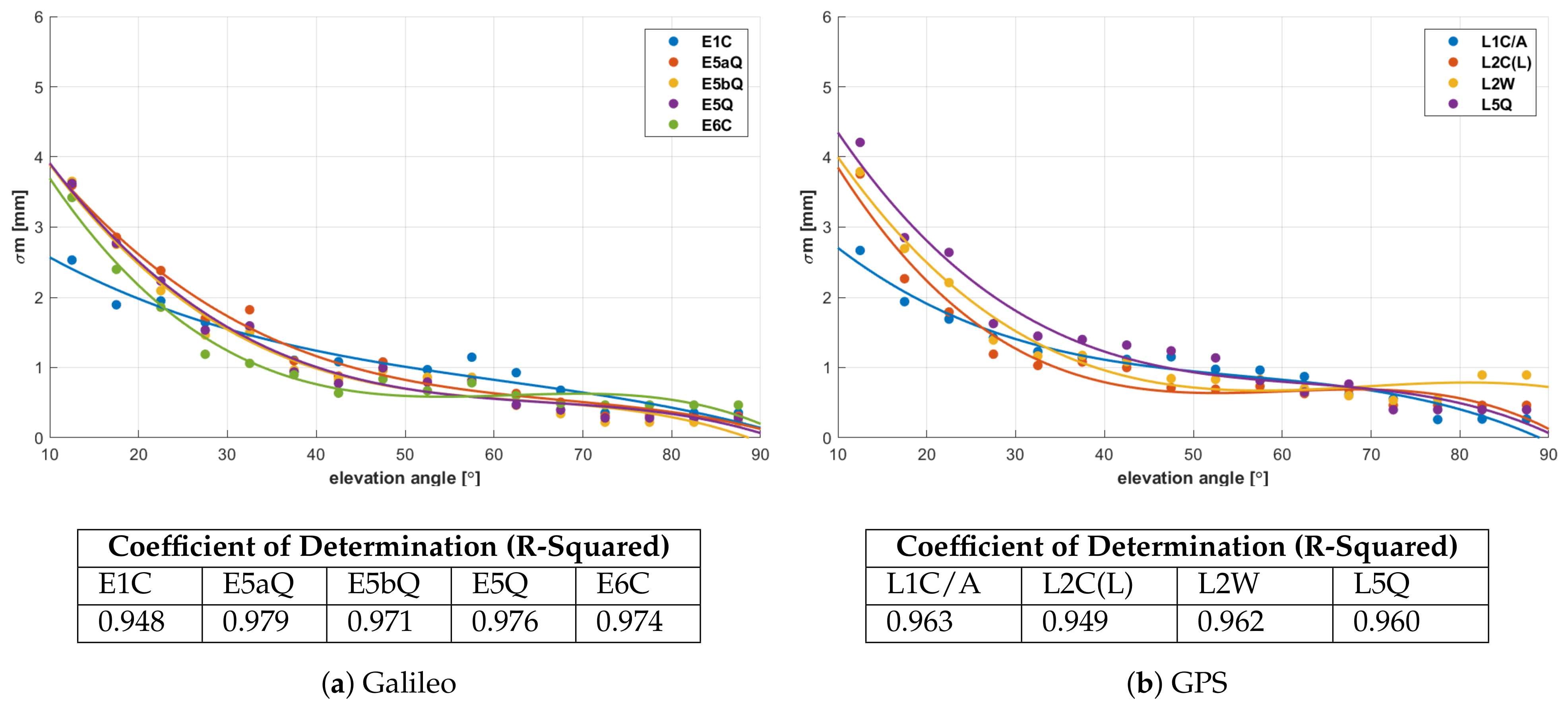
The values of STD of the multipath effect determined for smaller, five-degree elevation bins were selected as the test data for the model. Preliminary analyses pointed to the third-degree polynomial as the function best describing the relation between multipath and satellite elevation. The third-degree is a trade-off between accuracy and quality of fitting the polynomial curve to the data. Higher degree polynomials fit the data perfectly but do not represent them in an expected manner. The determined functions are presented in
Figure 4 along with the values of the R-Squared determination coefficient, which indicates the quality of the model fit to the data. Values of the coefficient ranging from 0.97 to 0.99 indicate a very good fit of the model to the given values of STD. Based on the equations describing the multipath with respect to elevation, the model values for three selected satellite elevations were calculated (see
Table 2).
The obtained model STD values for an elevation of 15° for each of the Galileo observations are smaller than those for GPS . Only for the L5 GPS observation are the results comparable to the Galileo observations. The STD values for the L1 C/A and L2C(L) observations are similar and are 3–4 cm higher than in the case of the Galileo observations, with the exception of E5. The multipath error values for the E5 AltBOC signal are significantly smaller in each case than those for the other observation types. The STDs of the multipath for L2W observations, 40 cm, 29 cm, and 12 cm, are about twice as large as the errors for the other signal types. For satellites close to the zenith, the value of the multipath error is approximately 5 cm and is several cm lower than that for observations of low-elevation satellites (except for the E5 and L2W observations).
Due to the local nature of the multipath effect, an important element of the analysis of the impact of this phenomenon is the examination of the spatial distribution of this error. Such an analysis makes it possible to identify the main directions, from which observations are particularly affected by signal reflections. This may allow us to eliminate from the environment objects that are potentially responsible for signal reflections or help to introduce an elevation mask, taking into account not only satellite elevation but also its direction.
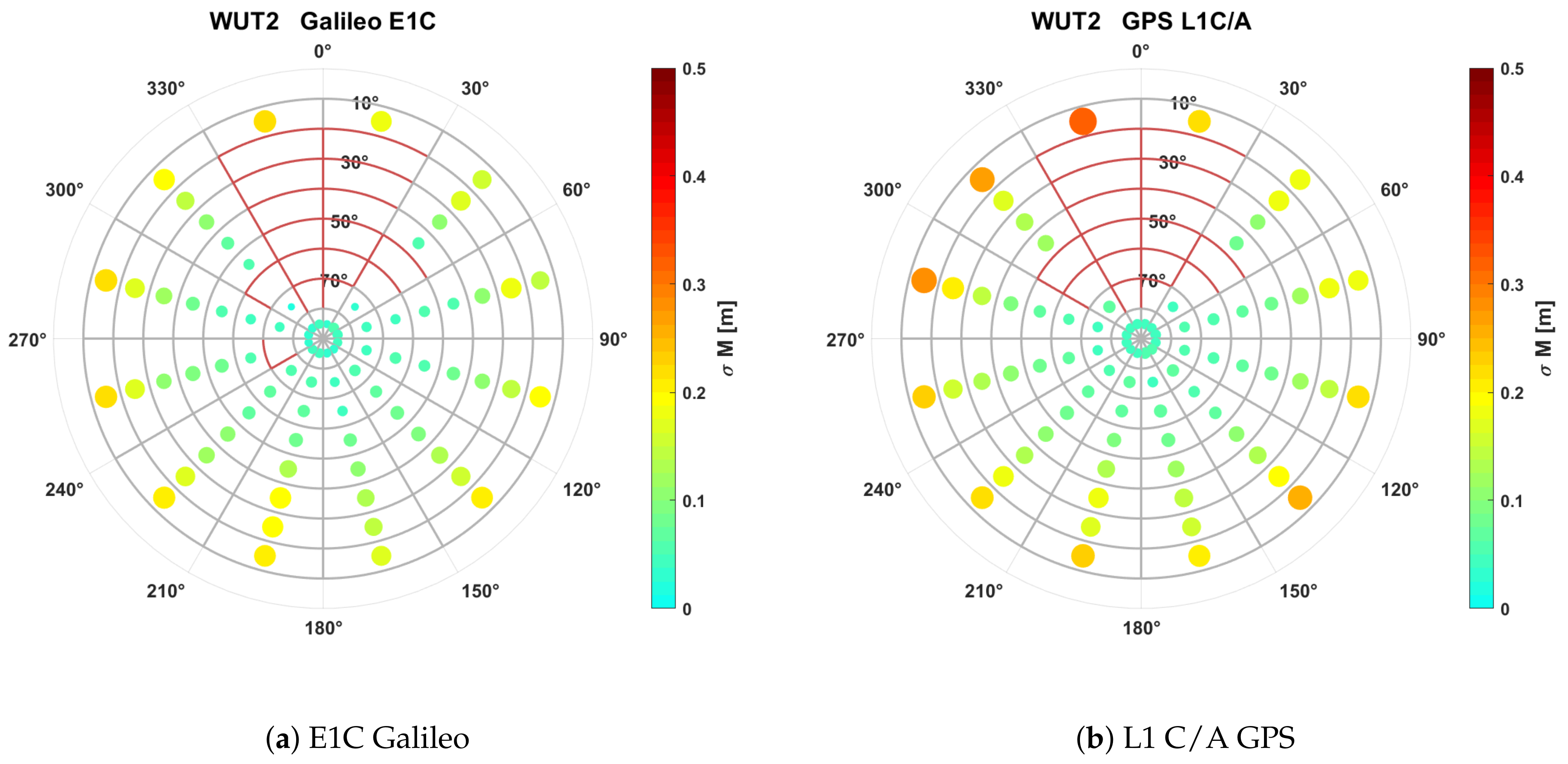
The spatial distribution of the multipath error, shown in
Figure 5, is based on the horizontal coordinate grid with a mesh size of 30° for azimuth and 10° for elevation. The multipath STD values were visualized as dots, where both the color and size of the dot reflect the magnitude of the parameter. Due to the almost identical nature of all observations of a given GNSS system, the visualization was made only for E1C and L1 C/A signals. The obtained results confirm that the largest multipath errors are recorded for observations of satellites in the elevation range between 10 and 20°. However, in the case of observations at the WUT2 station, the spatial distribution is very uniform, and it is impossible to determine directions that are particularly susceptible to recording signals reflected from terrain obstacles.
4.1. Phase Multipath Analysis
The multipath effect for phase observations was determined based on the methodology presented in
Section 3.2, using measurements from the very-short baseline WUT1-WUT2. When creating DD combinations, the reference satellite was the satellite with the highest elevation at a given epoch. The elevation of this satellite for most epochs was above 60°. For such elevations, the measurement noise is stabilized and its changes over time are minimized. The analysis of the code multipath shows that, additionally, the magnitude of the multipath impact for high satellites stabilizes. Therefore, it may be assumed that the impact of both noise and the multipath effect for reference satellites has constant values and that any changes of these parameters may be interpreted in relation to observations of non-reference satellites. Thus, the presented analyses of satellite elevation are related to changes in the elevation of non-reference satellites.
It can be assumed that the multipath impact on carrier-phase observations does not depend on the type of modulation but solely on the carrier wavelength (the longer the wavelength, the greater the multipath error) [
2]. The results obtained in the experiment confirm this assumption for all observations, regardless of the system, but only for the lowest elevations (see
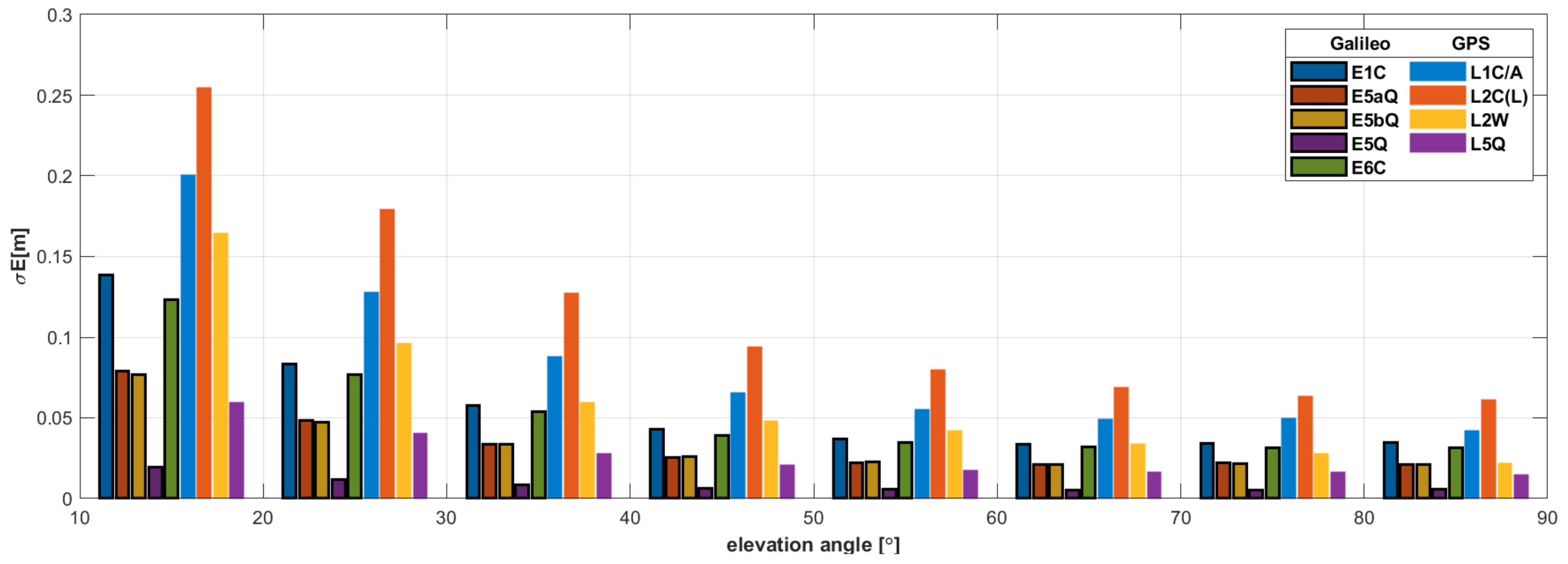
Figure 6). The lowest STD values for satellites at elevations up to 20° were thus obtained for observations at L1/E1 frequencies for both systems. For higher elevations, the relation between the multipath error and the carrier wavelength disappears. What is important for phase multipath is that no differences were recorded between the observations for the two systems other than due to differences in the carrier wavelengths of given signals.
Disproportionately higher values of the multipath for the L5 GPS signal may result from the fact that this signal is measured from the smallest number of satellites. In addition, the reference satellites for this observation had the lowest elevations.
With increasing satellite elevation, the value of measurement noise decreases, and for elevations above 40°, it stabilizes at a constant level of approximately 0.5 mm (see
Figure 7). It is clearly visible that higher noise values have been obtained for the E5a and E6 Galileo as well as L2C and L2W GPS observations.
Just as in the case of code multipath, a model of the correlation between the standard deviation and the satellite elevation was created (see
Figure 8). For this purpose, a third-degree polynomial was selected again. The obtained values of the R-squared coefficients, listed in
Figure 8, allow for the consideration of the model fit to the data to be sufficient.
Model values of STD for three satellite elevations are presented in
Table 3. Similarly to
Figure 8, the correlation between the multipath impact and the carrier wavelength is visible only for the lowest satellite elevation. Identical STD values of 2.3 mm were obtained for the E1 Galileo and L1 GPS observations. Despite slight differences in carrier wavelengths for the individual components of the Galileo E5 band, an identical STD value of 3.2 mm was obtained for all of these observations. On the other hand, for GPS observations at the L2 frequency, different values of the multipath impact were obtained, but the difference may be due to the specific nature of L2W signal tracking. For a satellite elevation of 50°, the multipath impact on the phase observations is at the level of 1 mm.
4.2. Continuous Wavelet Transform Analysis
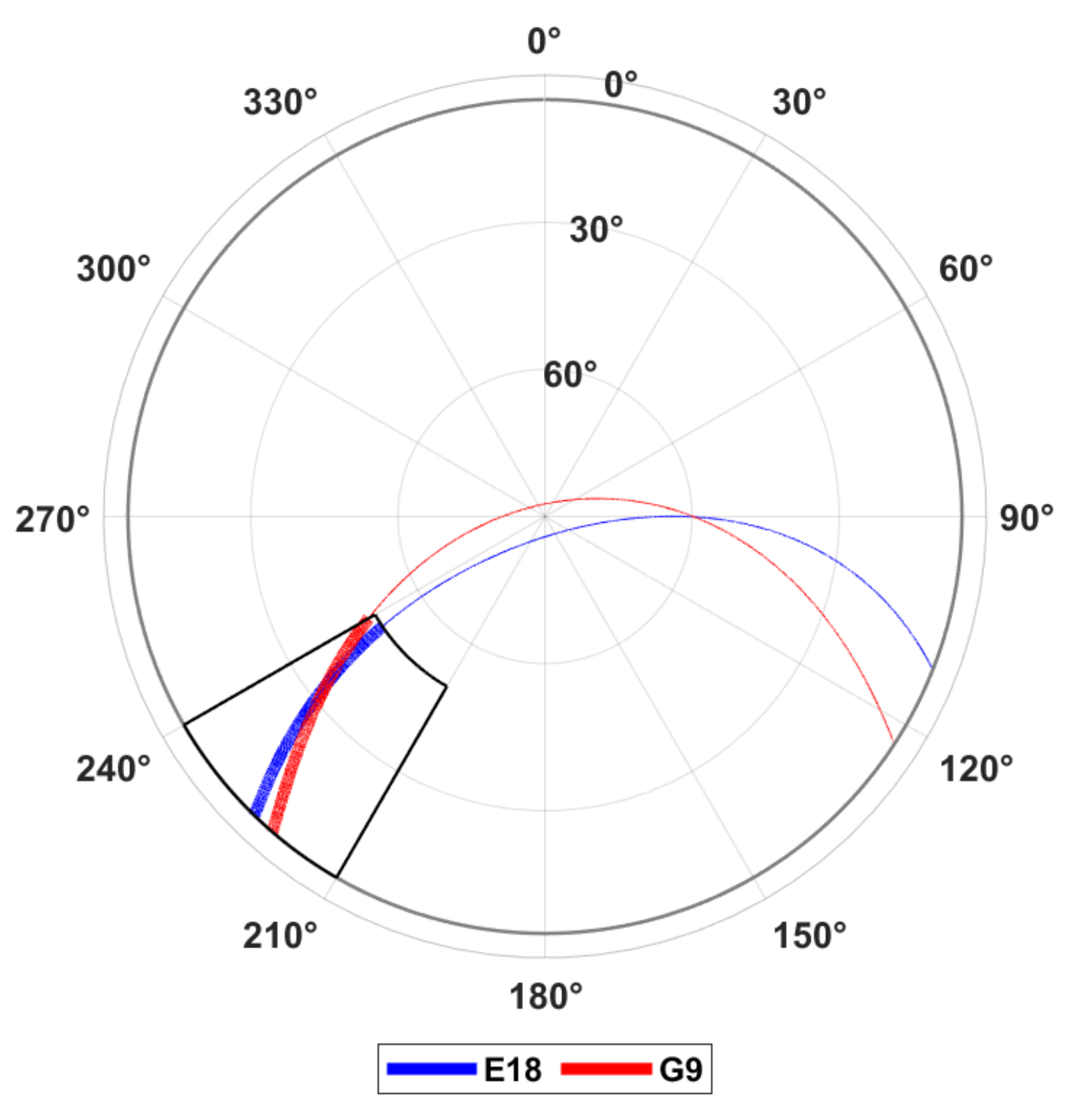
The multipath was compared for given types of observations using the idea of time-frequency analysis of the signal with the wavelet transform method (see
Section 3.3). For this purpose, a pair of Galileo and GPS satellites with similar observation arcs (especially in the low elevation range) was selected (see
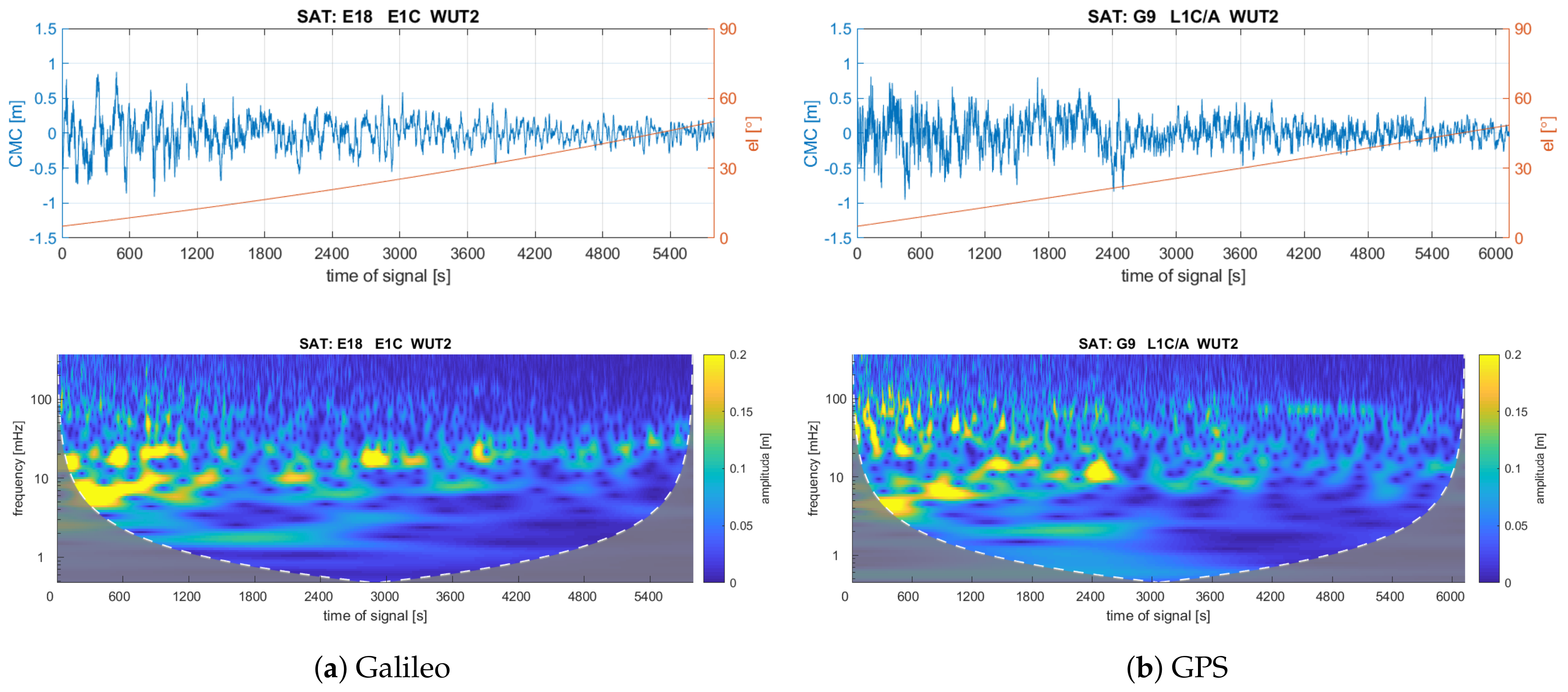
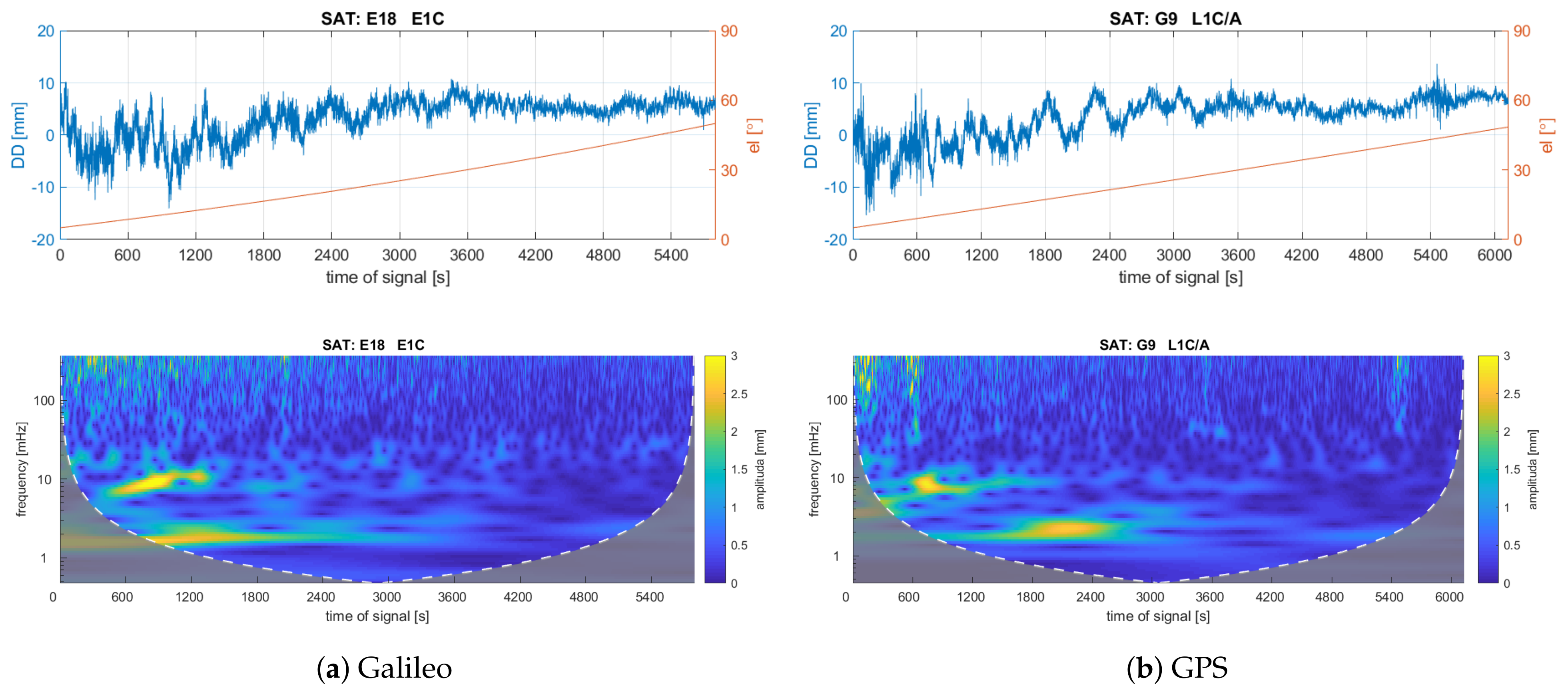
Figure 9). This allowed us to ensure that the observations of both satellites are affected by signal reflections from the same terrain obstacles. The comparison was performed for both CMC combinations and for DD phase residuals only for the L1 signals of both systems: E1C Galileo and L1 C/A GPS.
Figure 10 and
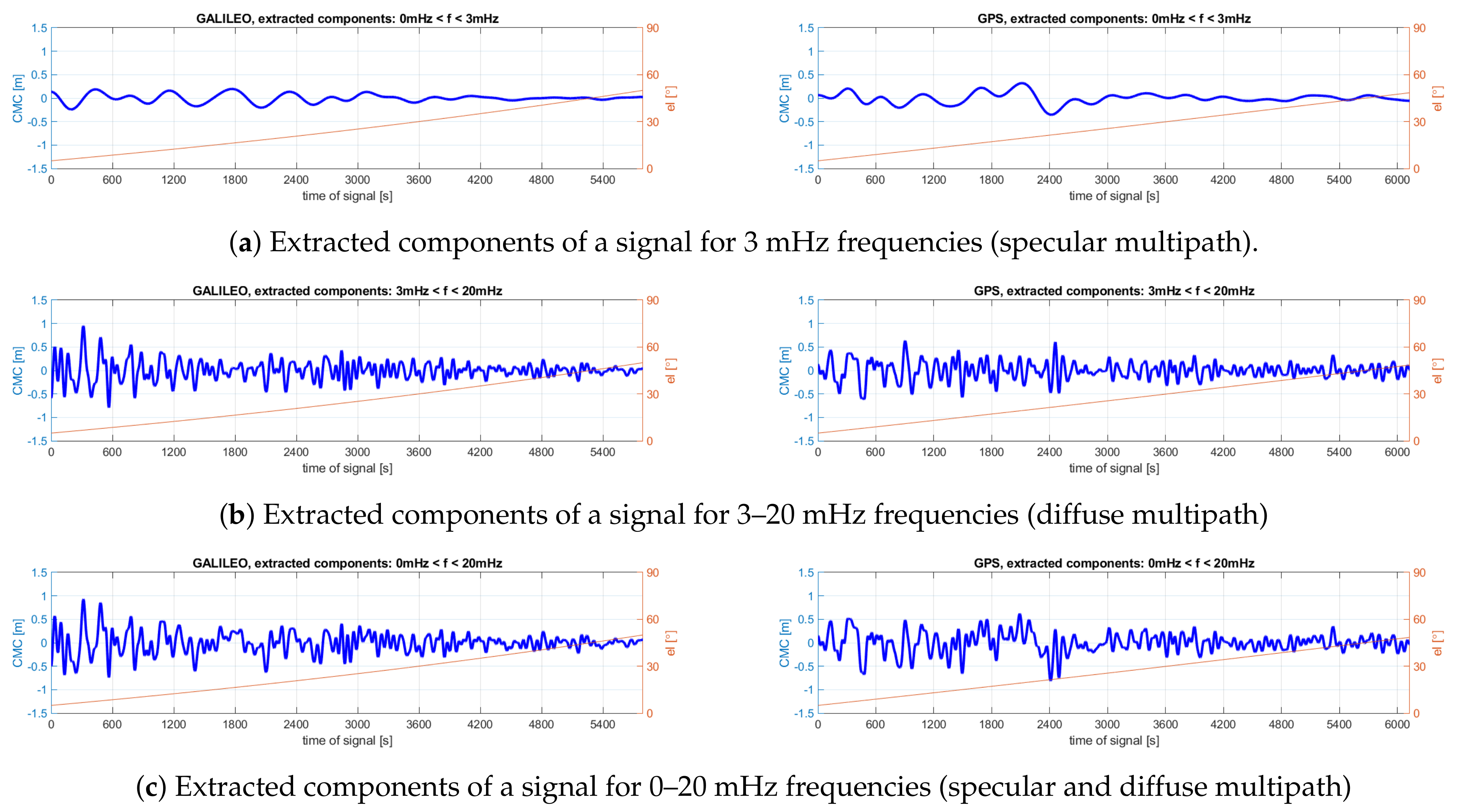
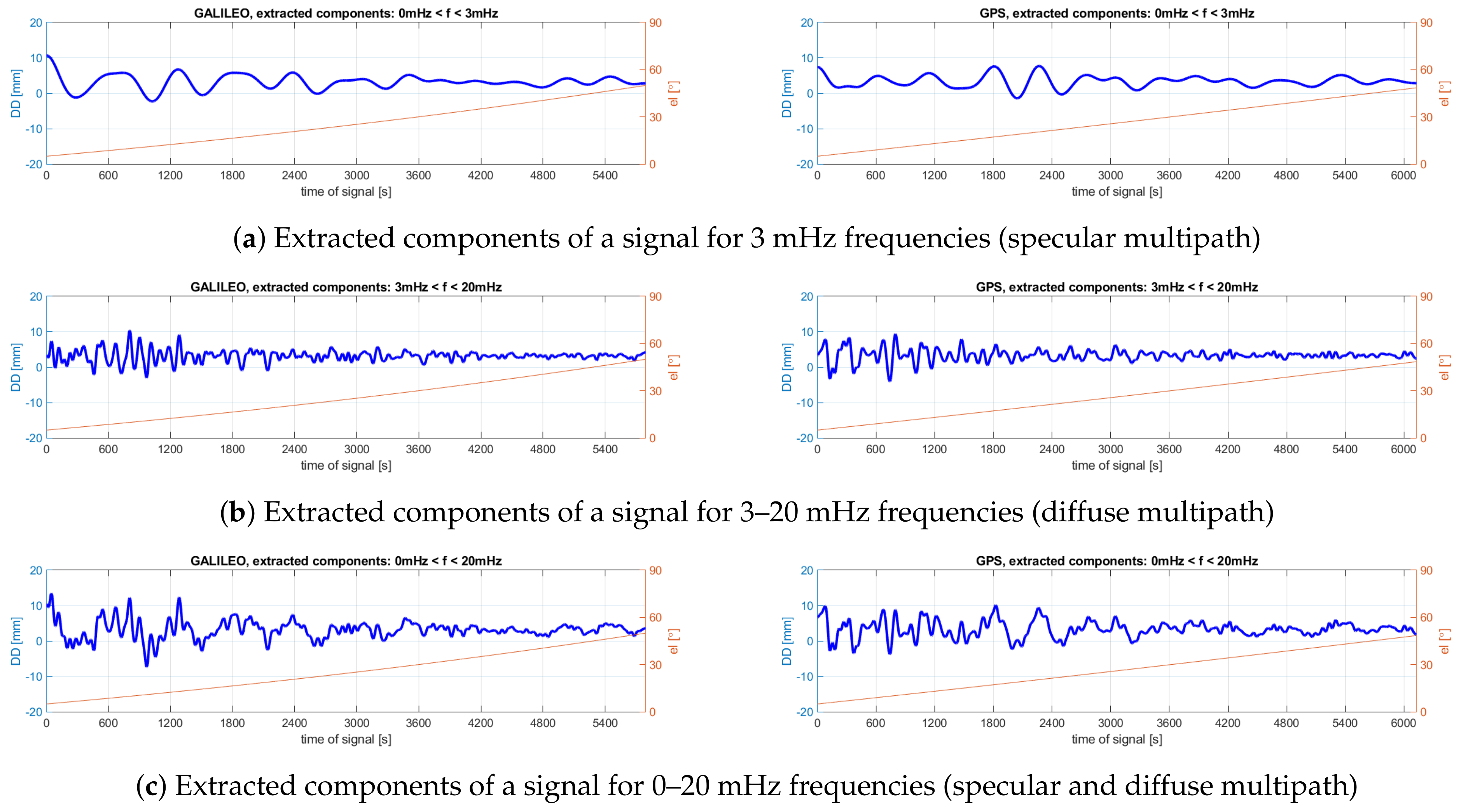
Figure 11 show the time series of CMC combinations and DD phase residuals for given satellites (in the case of DD, the analyses concern non-reference satellites) as well as signal scalograms, obtained as a result of the performed wavelet transform. In order to facilitate comparisons, the time shown on the horizontal axis of the visualization refers to the duration of the respective observation series, as the observations of the two satellites refer to different times of day. The time-series diagrams additionally show the elevation of a given satellite. Next, using a feature of the multipath effect related to the characteristic periodicity of its impact, the signals were decomposed and reconstructed into components with frequencies typical for the phenomenon: from 0 to 3 mHz for specular reflections, from 3 to 20 mHz for diffuse reflections, and from 0 to 20 mHz for the whole range (see
Figure 12 and
Figure 13).
From the CMC scalograms, it can be seen that the observation series of both satellites show disturbances with similar characteristics at similar times, with frequencies of approximately 10 mHz, mainly in the initial part of the analyzed signals (i.e., for low satellite elevations). What is distinctive is also the disturbance that occurs between the 2400th and the 3000th seconds. It is worth noting, however, the presence of low-frequency components in the signal, at approximately 1 mHz, observed for up to about the 3000th second. In the figures showing the extracted components of the signal, it is clearly visible that it is the components with higher frequencies that are characterized by larger amplitudes. The characteristics of individual disturbances for both satellites are very similar.
Table 4 shows the maximum values of amplitudes for given components of the signal. It should be emphasized that these statistics concern only those fragments of observations when the satellite was observed at an elevation of at least 10° (the figures show the range of observations from an elevation of 5°). Thus, these amplitudes represent the maximum values of the observation errors due to the multipath effect for given signal reflections. It can be seen that the highest values of the multipath errors have been recorded for the whole frequency range characteristic for this phenomenon. The peak-to-peak amplitudes of the multipath error are equal to 1.094 m for Galileo E1 observations and 1.434 m for GPS C/A code. The impact of specular reflections in the examined case turns out to be more than two times smaller. The errors determined in this way are larger for the GPS signal in almost every case, which confirms the conclusions regarding the superiority of the Galileo code observations with respect to GPS.
In the case of DD phase residuals, the signals are devoid of high-frequency components associated with measurement noise. The scalograms of the analyzed series show mainly two main components of these signals (see
Figure 11). As in the case of CMC, these are components with frequencies of approximately 10 mHz, also occurring in the initial part of the signal, as well as components with lower frequencies of approximately 1–3 mHz, occurring for up to about the 3000th second of the signal. The strong similarity in terms of the signal characteristics of both Galileo and GPS satellites as well as in terms of the frequency characteristics of the DD and CMC series confirms that the observed interference is caused by the impact of signal reflections (the multipath effect). The peak-to-peak amplitudes of specular multipath error for DD phase residuals are equal to 9.0 mm for E1 Galileo observations and 9.1 mm for L1 GPS (see
Table 5). Again, the largest errors were observed for the entire frequency range characteristic of the multipath effect. For this range, however, the error for GPS observations is clearly smaller than that for Galileo observations (peak-to-peak amplitudes equal to 19.6 mm for Galileo and 13.6 mm for GPS).
4.3. Positioning Time-Series Analyses
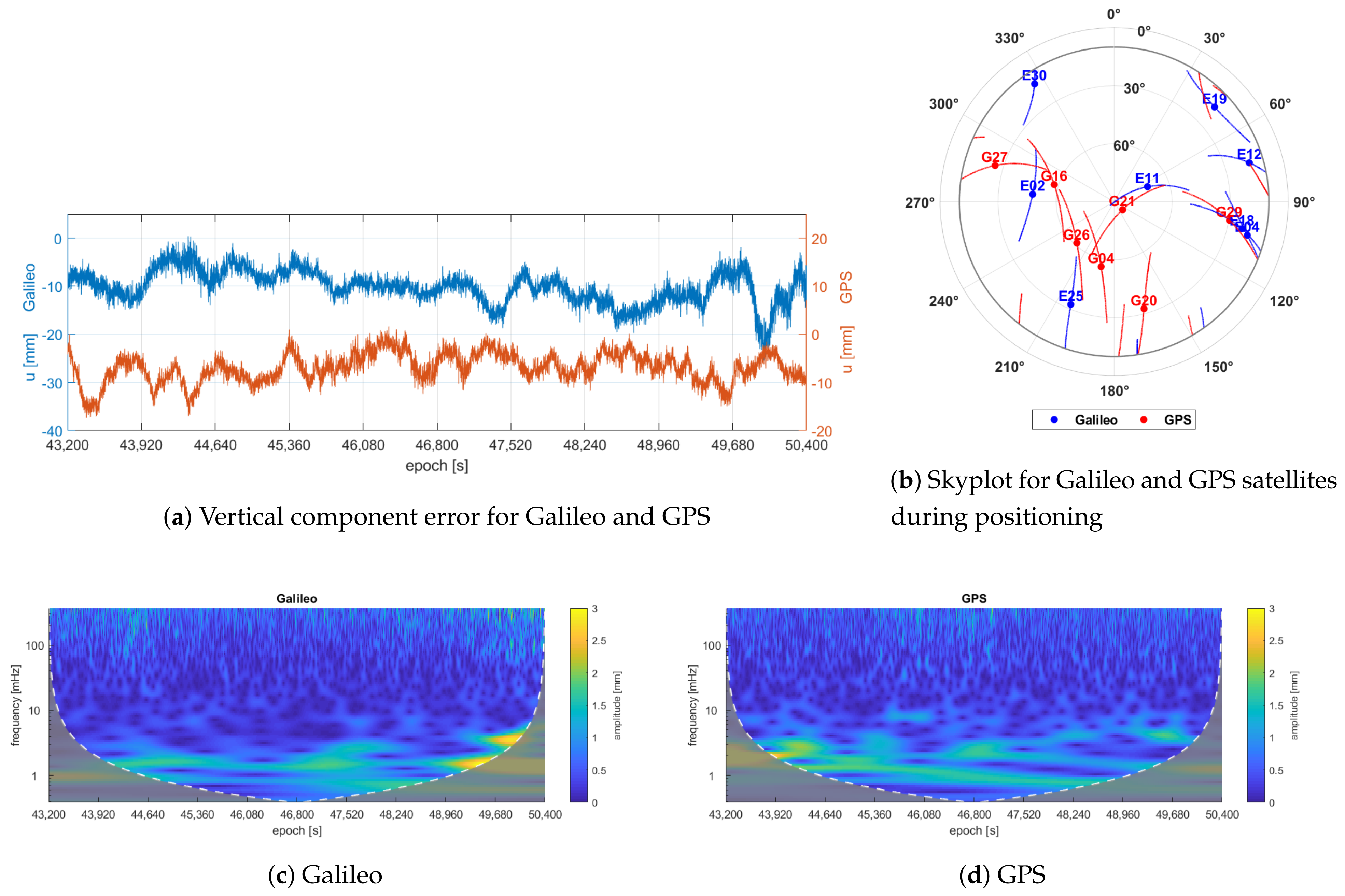
The last part of the experiment involved an analysis of the position time series for the relative positioning for the WUT1-WUT2 baseline obtained from the Galileo and GPS observations. Due to significant differences in the number of observed satellites for both systems, a 2-h period of the day was chosen so that both the number of visible satellites and Dilution of Precision (DOP) parameter for both systems were similar. Thus, the positions between 12 and 14 UTC were analyzed. The Postion DOP values for the satellites of the respective systems assumed similar values of approximately 2.5.
Figure 14b shows the visibility of the satellites of both systems along with their two-hour observation arcs with the position of the satellite in the middle epoch of the session (i.e., 13:00 UTC time).
The geometry-based double-differenced ionosphere- and troposphere-fixed model, which assumes that both delays are negligible for such a short baseline, was derived in an instantaneous mode with an interval of 1 second and elevation mask of 5°. In the GPS positioning model, the L5Q observations were not included due to their small number, whereas for Galileo, the E5aQ observation was excluded due to its direct dependence on the E5Q observation used. For both systems, an elevation-dependent weight function was used in the stochastic model. Integer carrier-phase ambiguity resolution (AR) was performed by applying the LAMBDA method [
40], and the correctness of AR was verified by comparing the determined values with known values calculated on the basis of known coordinates of the WUT1 and WUT2 stations. A correct AR was obtained for all solutions.
Table 6 summarizes the RMS for the receiver positions determined in this way in relation to the reference position. The statistics concern errors for the components in the local system: north
n, east
e, and vertical
u. It can be seen that the receiver’s position was determined with a similar accuracy. Only the elevation was found to be noticeably more accurate compared to Galileo due to the use of GPS observations. This difference may be due to the fact that, despite attempts to select the most favorable satellite visibility conditions for Galileo, it did not provide the same satellite availability as GPS.
The main purpose of this comparison, however, was to try to identify, in the determined coordinate series, disturbances due to the multipath effect. For that purpose, the coordinate series were subjected to time-frequency analysis using a wavelet transform, similarly to that observed earlier.
Due to the largest errors in vertical component determination, this paper presents the results only for the analysis of this particular coordinate.
Figure 14a presents the time series of the receiver height. For better legibility, the graphs for both systems were placed apart. What is distinctive is that, for both systems, similar systematic error was observed, as the determined heights are shifted in relation to the reference value by approximately 10 mm.
Scalograms (see
Figure 14c,d) clearly show that, for the height series, the main power of the signal is concentrated on low-frequency components, below 5 mHz. For higher frequencies, the signal amplitude is very low.
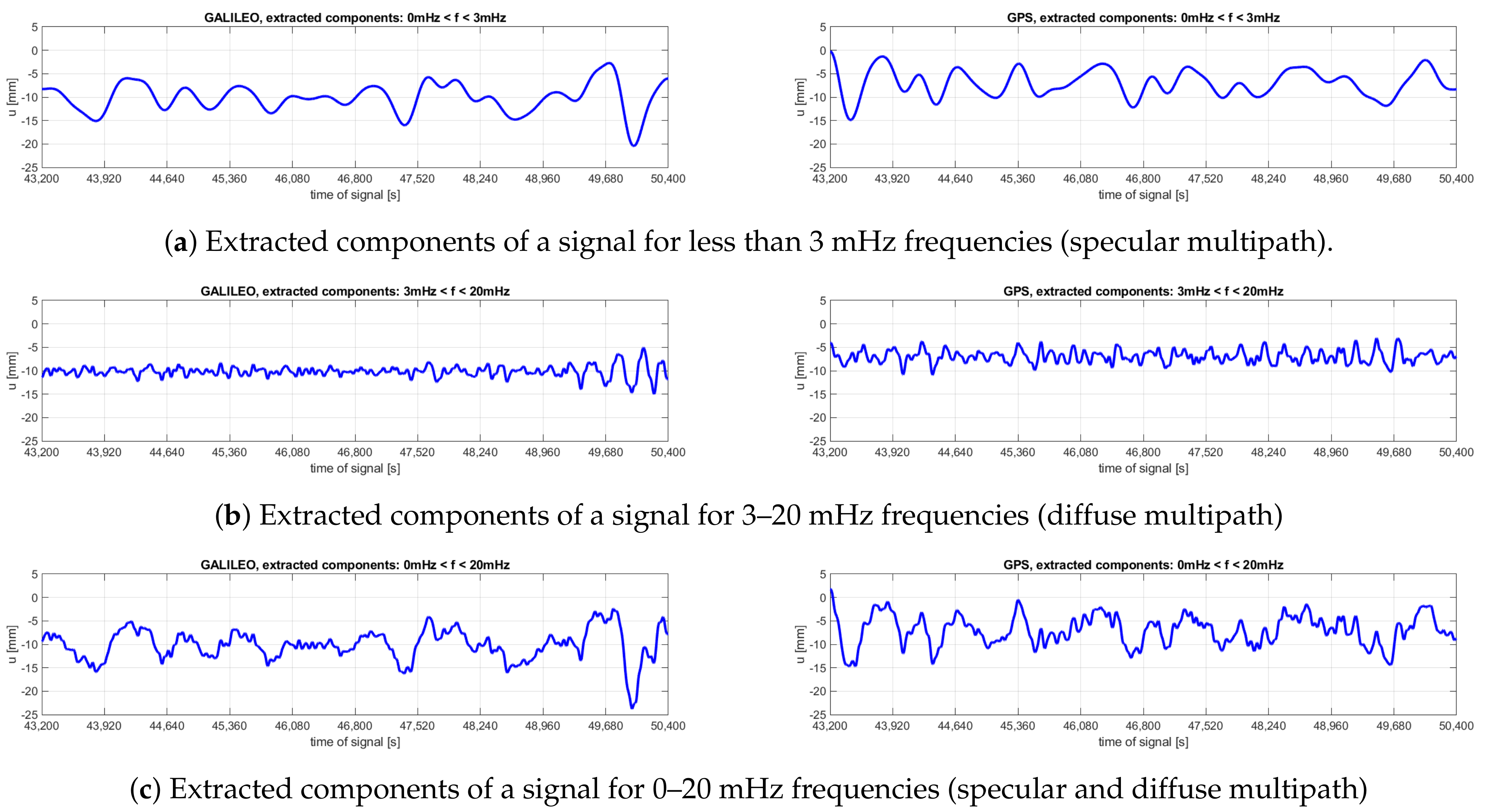
Figure 15 shows the decompositions of the signal of the
u-coordinate series into components of frequencies typical for the multipath effect. These diagrams confirm that the main disturbances in the determined values are linked with low frequencies of changes. The individual maximum errors of coordinates and the range of amplitudes of these errors are summarized in
Table 7. For the low-frequency range, related to specular reflections of the signal, the characteristics of disturbances for both systems are very similar. It can be noticed, however, that the amplitude of fluctuations for Galileo observations is minimally larger than that for GPS. For the higher frequency range, from 3 mHz to 20 mHz, except for the final part of the series, the amplitude of the fluctuations related to the diffuse reflections of the signal is smaller for the Galileo system.
5. Discussion
The impact of the multipath effect on code and phase observations as well as on precise positioning accuracy for the Galileo and GPS systems has been analyzed in depth in this paper. The research was based on CMC observations as well as on a short length baseline measurement. Using time-frequency analysis, the multipath error was classified due to the impact of diffuse and specular reflections. The analyses performed present the characteristics of the multipath error and measurement noise for observations made by reference GNSS stations. The results obtained confirm the theoretical assumptions that Galileo code observations are more resistant to the multipath impact compared to non-upgraded GPS signals.
It was observed that the impact of both the multipath effect and measurement noise is closely related to satellite elevation above the horizon (the lower the satellite elevation, the higher the observation error). For the lowest satellite elevations, one can expect average code multipath errors (STD) ranging from 20 to 25 cm for most of the analyzed signals. The smallest values of the multipath error (approximately 13 cm), were obtained for the E5 AltBOC Galileo observation, which is a 30% improvement in terms of the properties of this signal with respect to other observations of this system. The highest values of the multipath error (STD = 40 cm) were obtained for the L2W GPS observation. Galileo observations offer 13% better resistance to the multipath effect compared to GPS observations, with the exception of the E5 and L2W signals. Galileo’s supremacy has also been demonstrated for observations at the basic system frequencies: E1/L1. On the other hand, individual maximum observation errors related to the multipath impact can reach peak-to-peak amplitude values exceeding 1 m, as determined using the wavelet transform. In this case, the supremacy of Galileo E1 observation turns out to be even greater. Depending on the type of reflections analyzed, the peak-to-peak amplitude for the C/A GPS code is larger by at least 16% and up to as much as 40%.
The STD of measurement noise of the code observations ranges from 2 cm for E5 Galileo to 25 cm for L2C GPS for the lowest satellite elevation range. Even when not taking into account the AltBOC signal, the remaining Galileo observations have a reduction characterized by reduced measurement noise by almost 40% compared to GPS observations.
The multipath impact on the undifferentiated phase observations for the lowest satellite elevations was recorded at the level between 2 and 3.5 mm. This impact is closely related to the carrier wavelength of a given signal. The phase observation noise was determined at the level of 1 to 2 mm. For high satellite elevations, it is approximately 0.5 mm. The maximum multipath impact on DD phase residuals can reach values with a peak-to-peak amplitude as high as 20 mm.
Since similar measurement conditions for both GNSS systems were ensured, the positioning accuracy for the positioning model used in this paper is very similar for both systems. The inferiority of the still much less available Galileo system has been demonstrated only for the determination of the vertical component. The multipath effect causes disturbances in the time series of this component in the range of 21 mm for the Galileo system and 17 mm for the GPS system, for the whole range of frequency of changes typical of the multipath effect.
The results allow for the assumption that the replacement of observations of the P(Y) code (L2W) by modernized civilian observations of this system, especially at frequency L5, will result in a significant improvement in the accuracy of precise positioning using dual-frequency GPS observations. Similarly, reaching full operational capability by Galileo as a result of the increasing number of available satellites is likely to result in more precise positioning with the use of Galileo-only observations than with the use of GPS-only measurements.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}