
Prediction Algorithm for Satellite Instantaneous Attitude and Image Pixel Offset Based on Synchronous Clocks


Abstract
:
1. Introduction
2. Materials and Methods
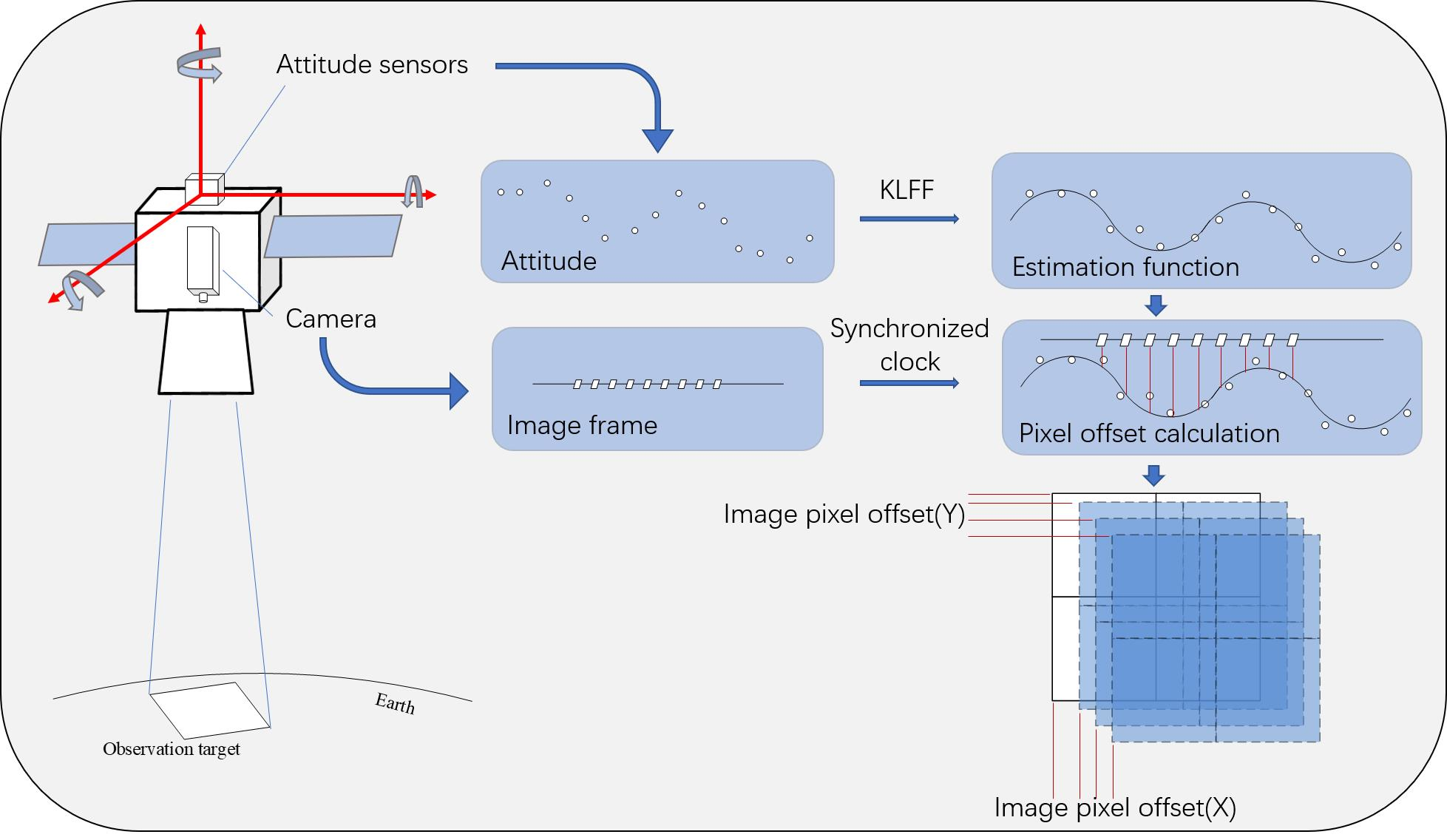
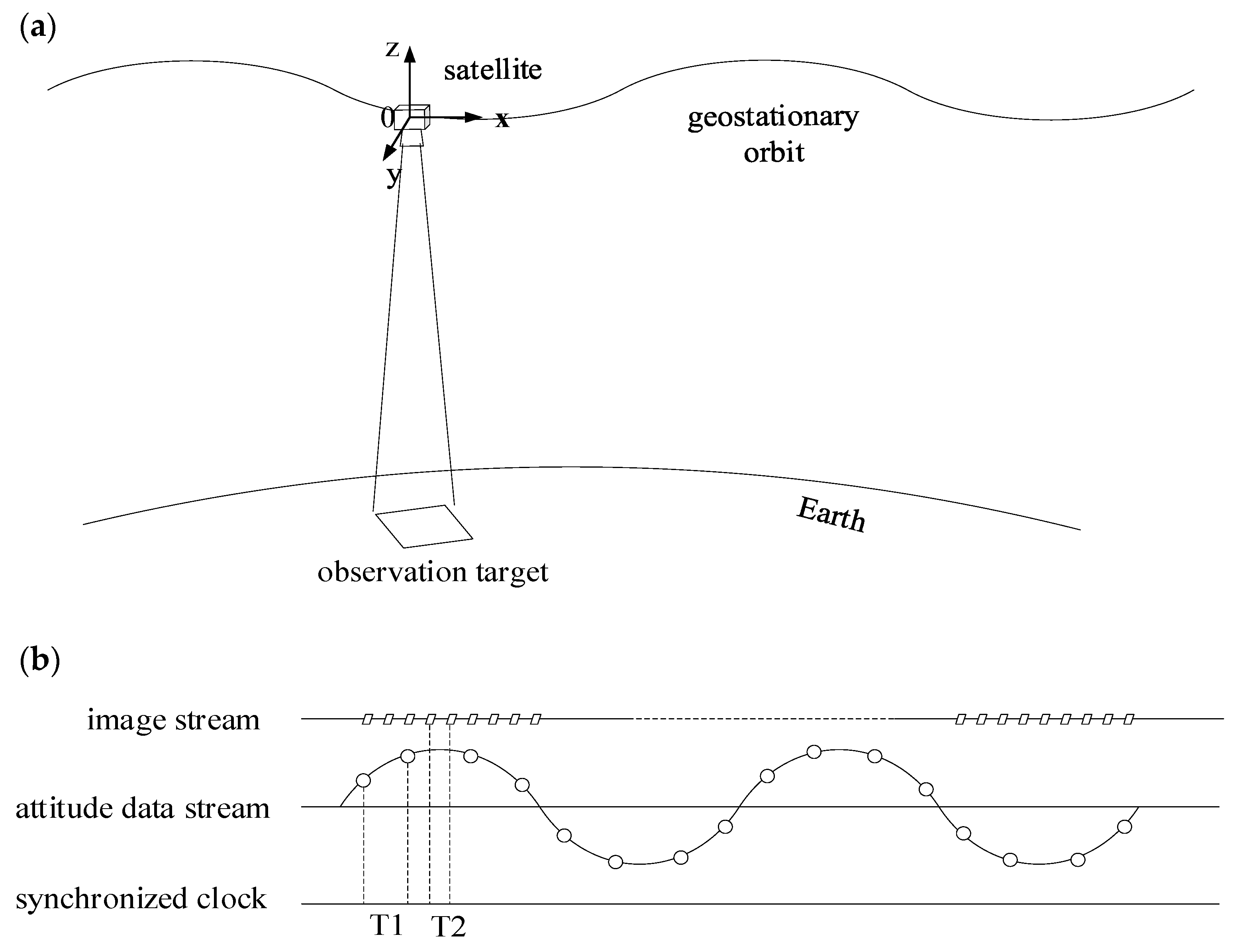
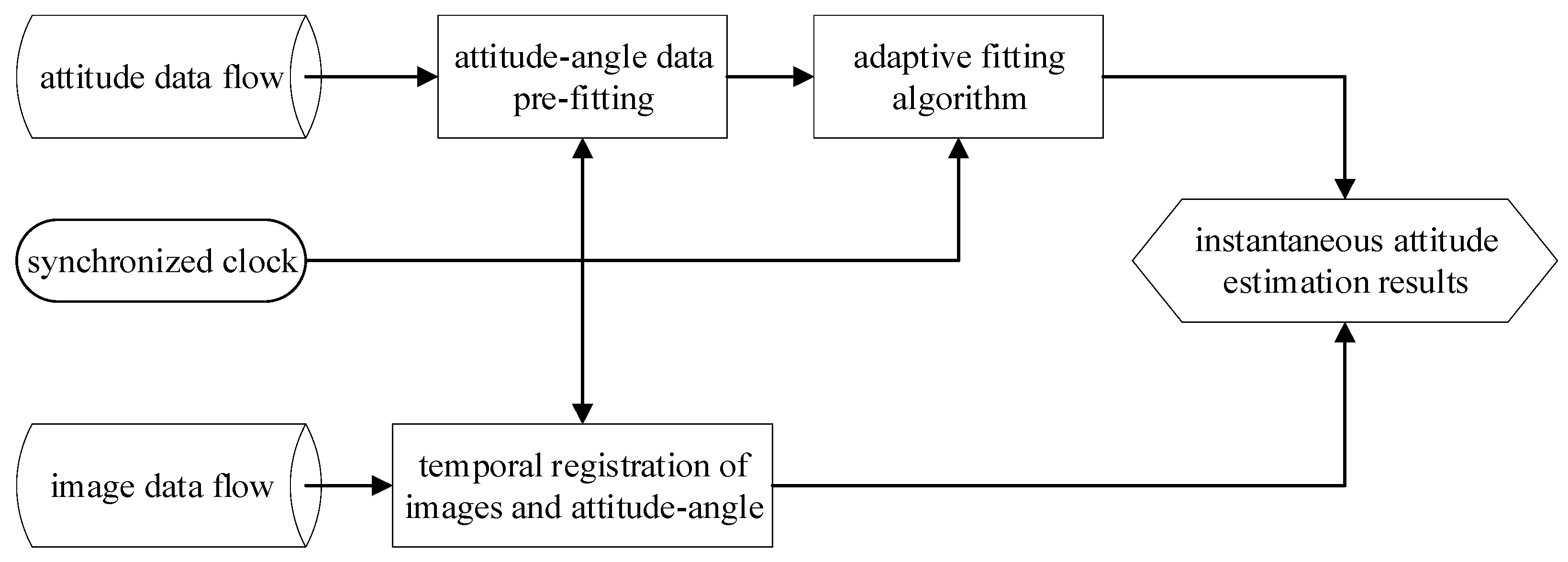
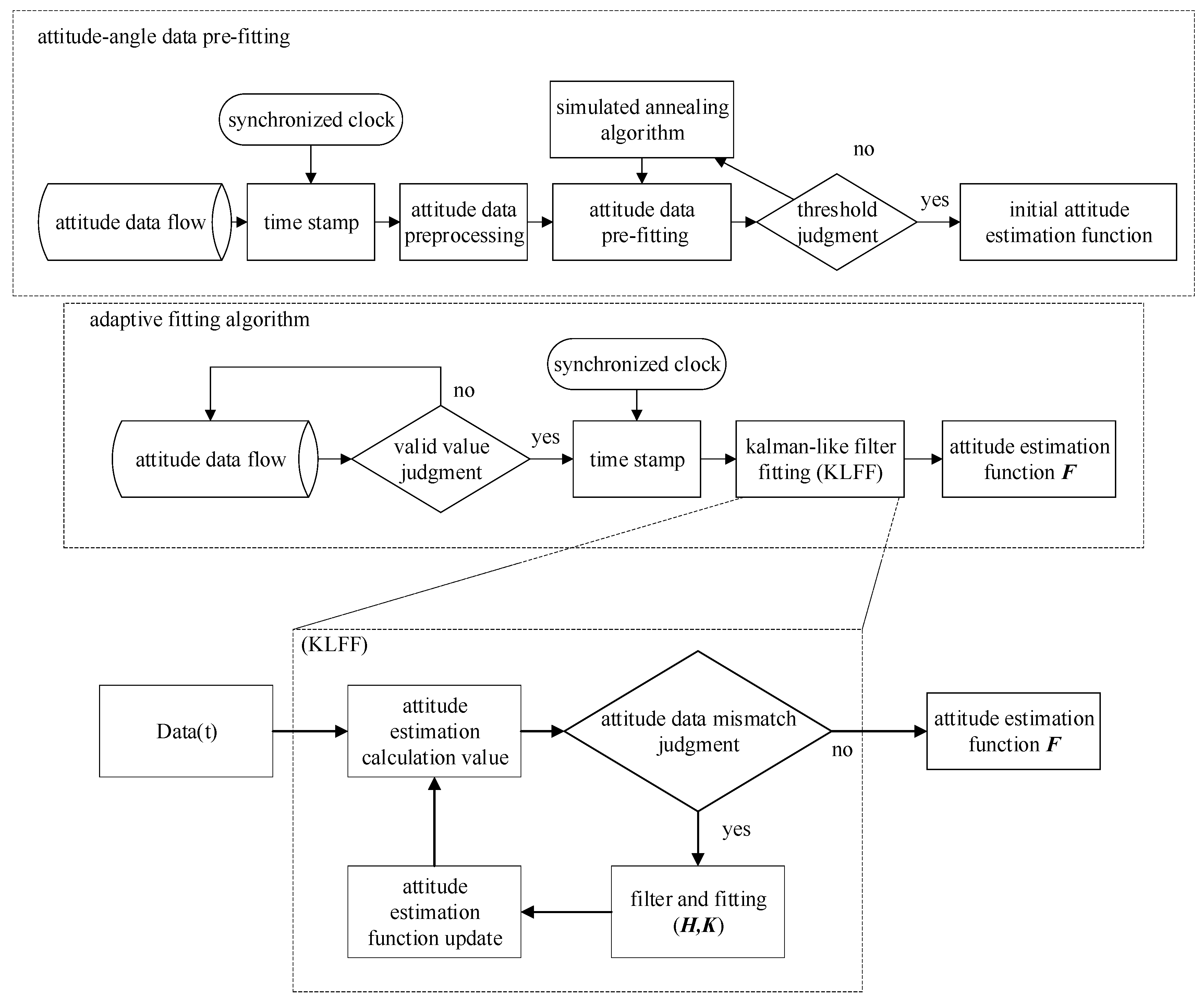
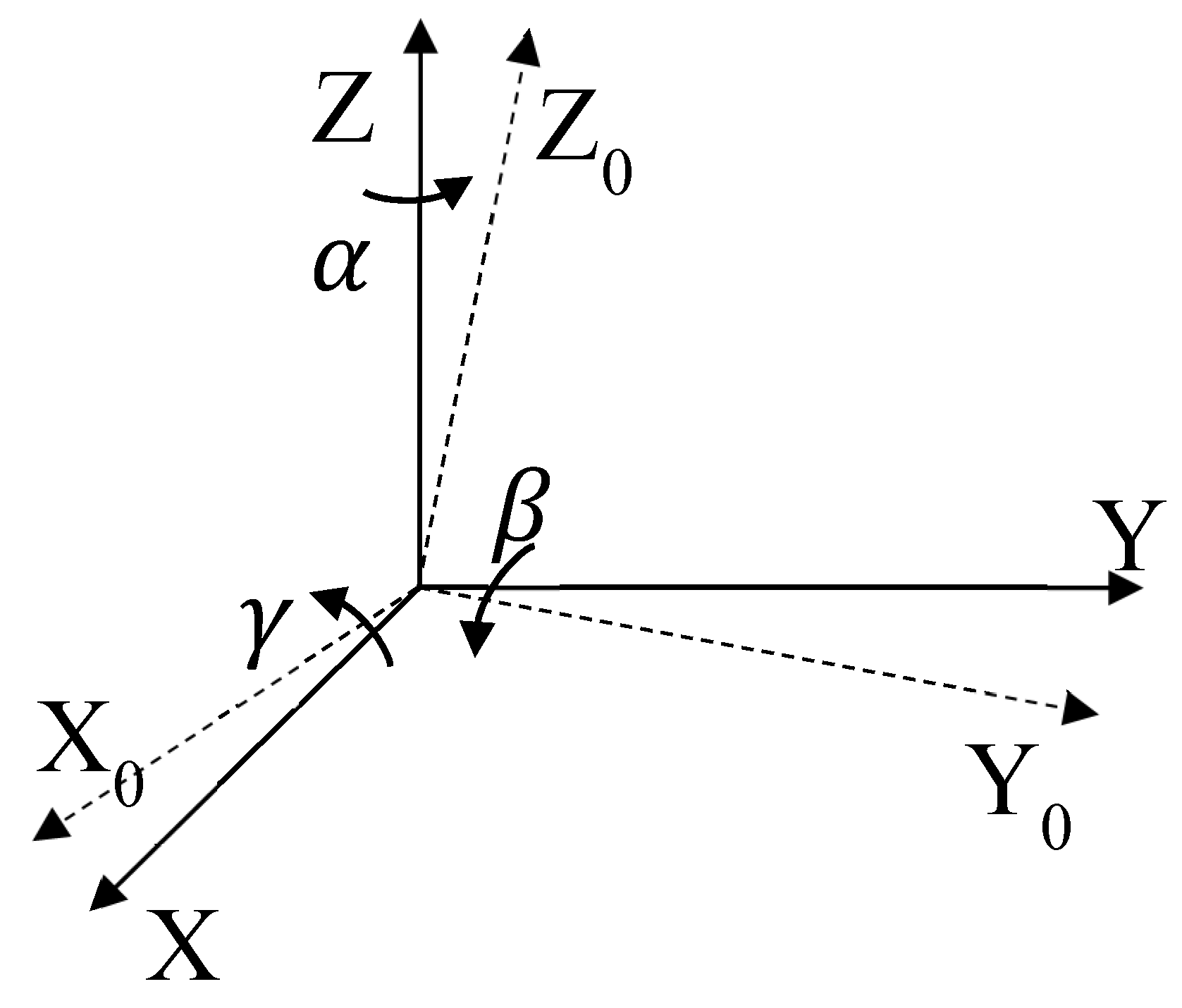
2.1. Principle of Satellite Attitude Prediction Algorithm
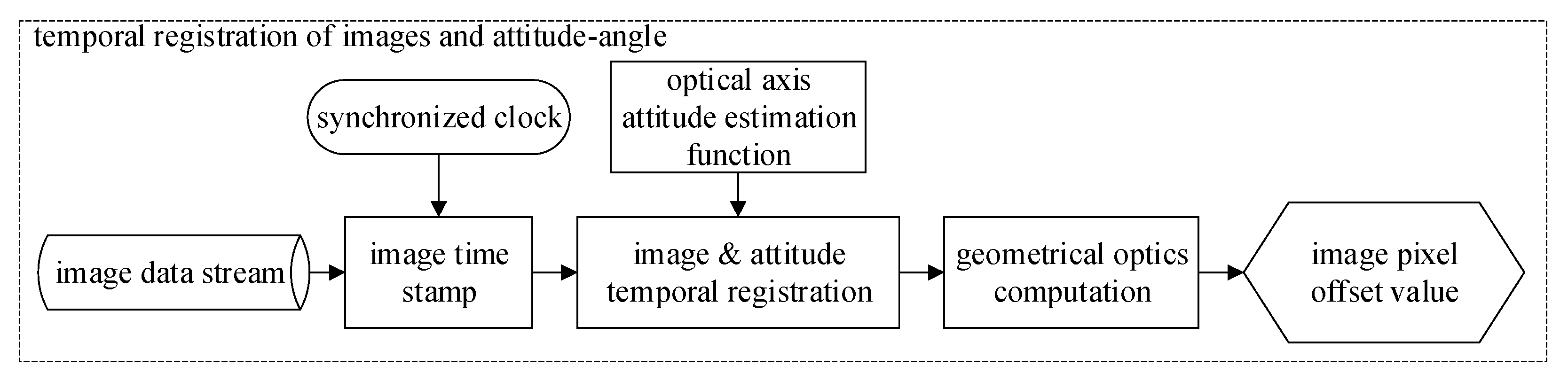
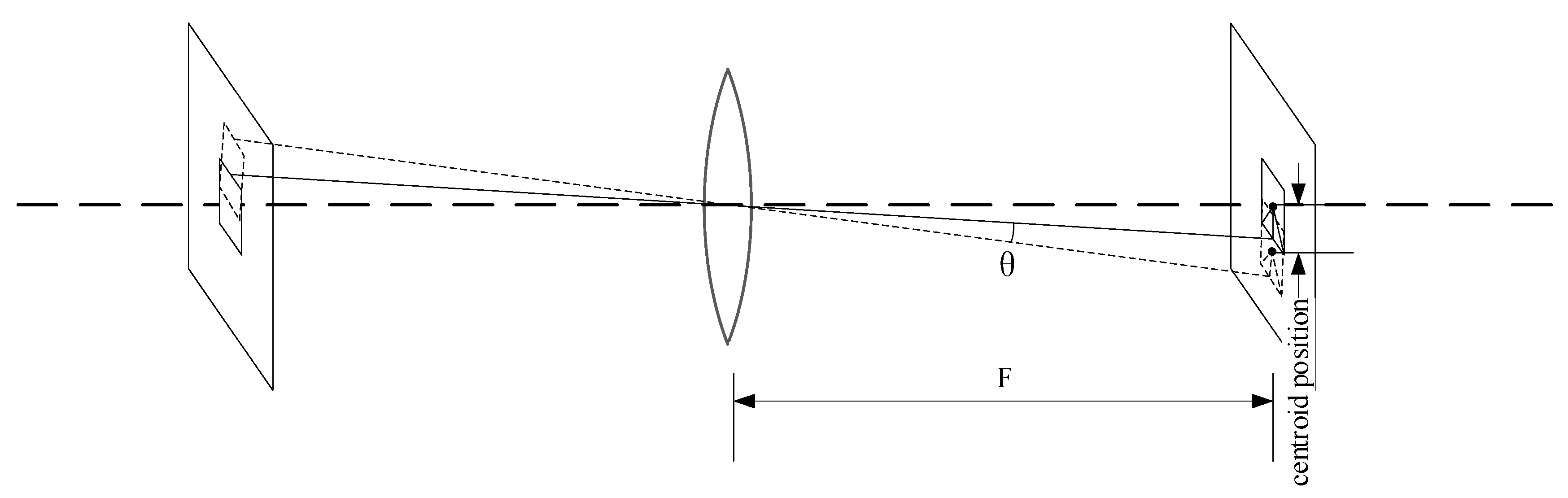
2.2. Image Pixel Offset Calculation Principle
2.3. Simulation Experiment Verification and Data Acquisition
3. Results and Discussion
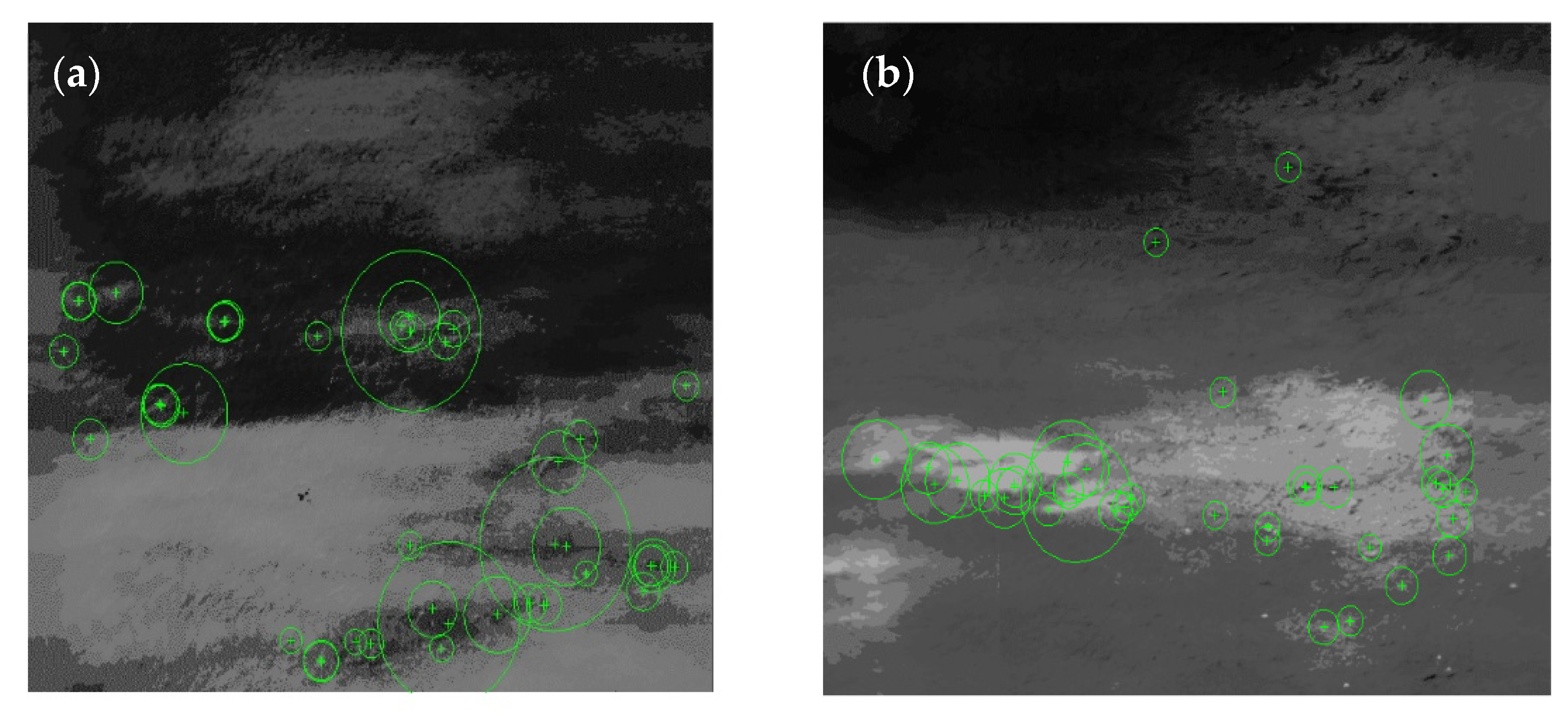
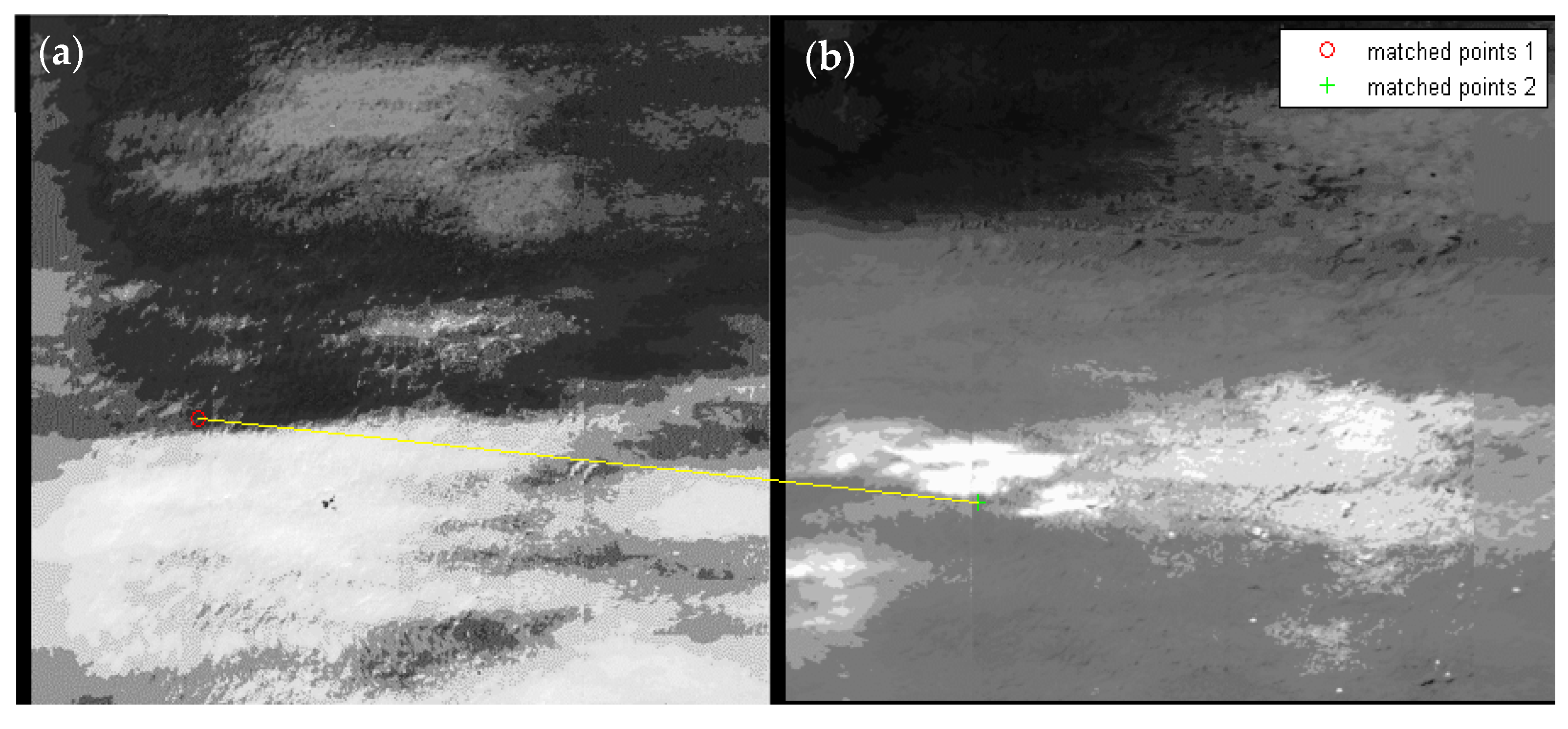
3.1. Ocean Observation Simulation Experiments
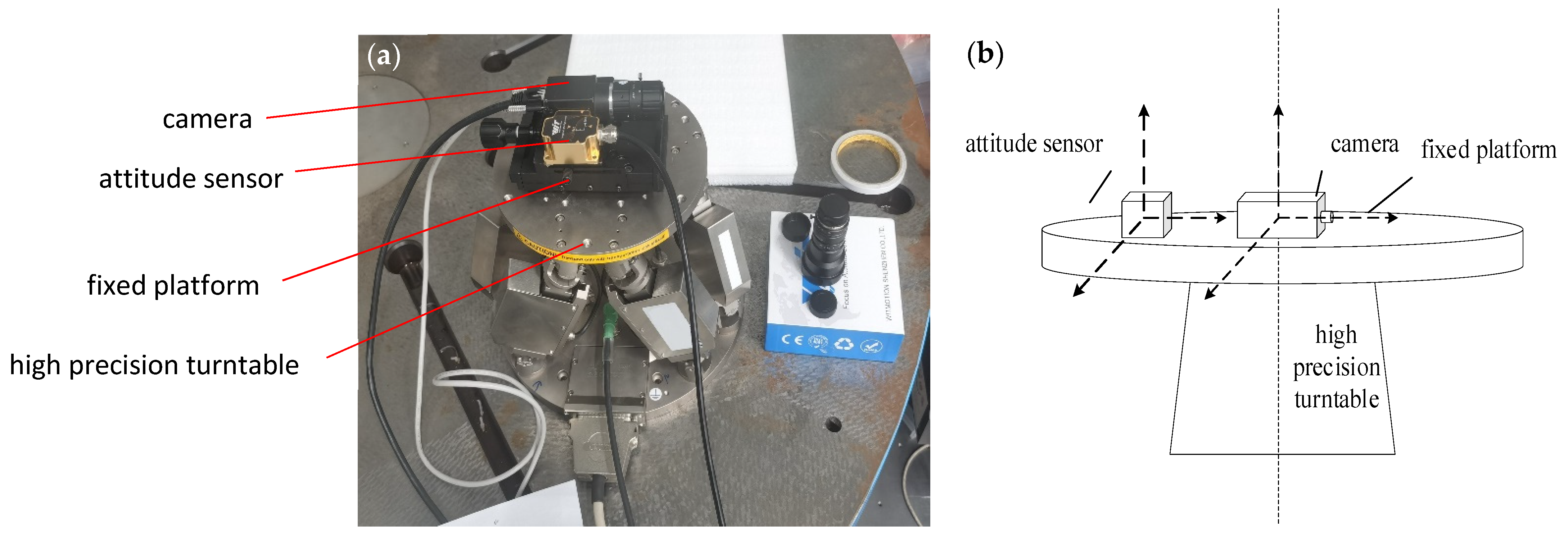
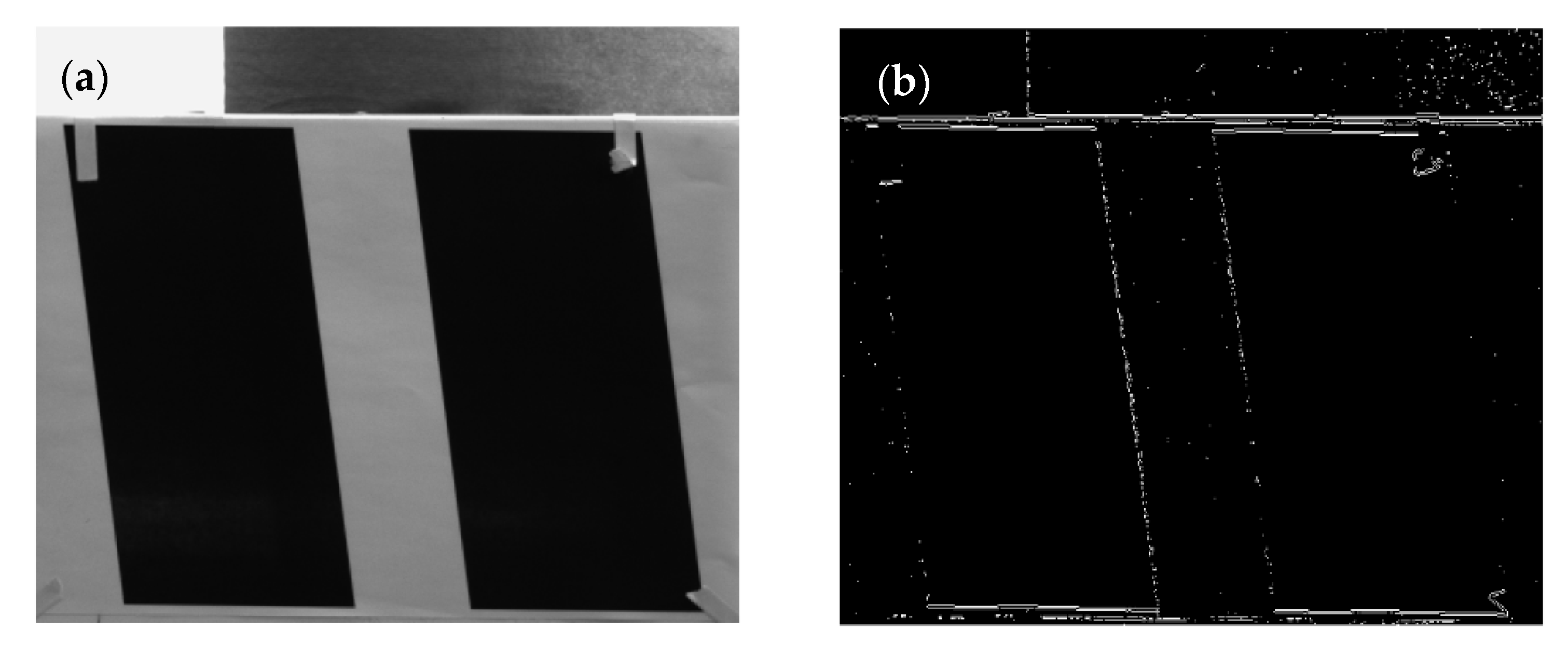
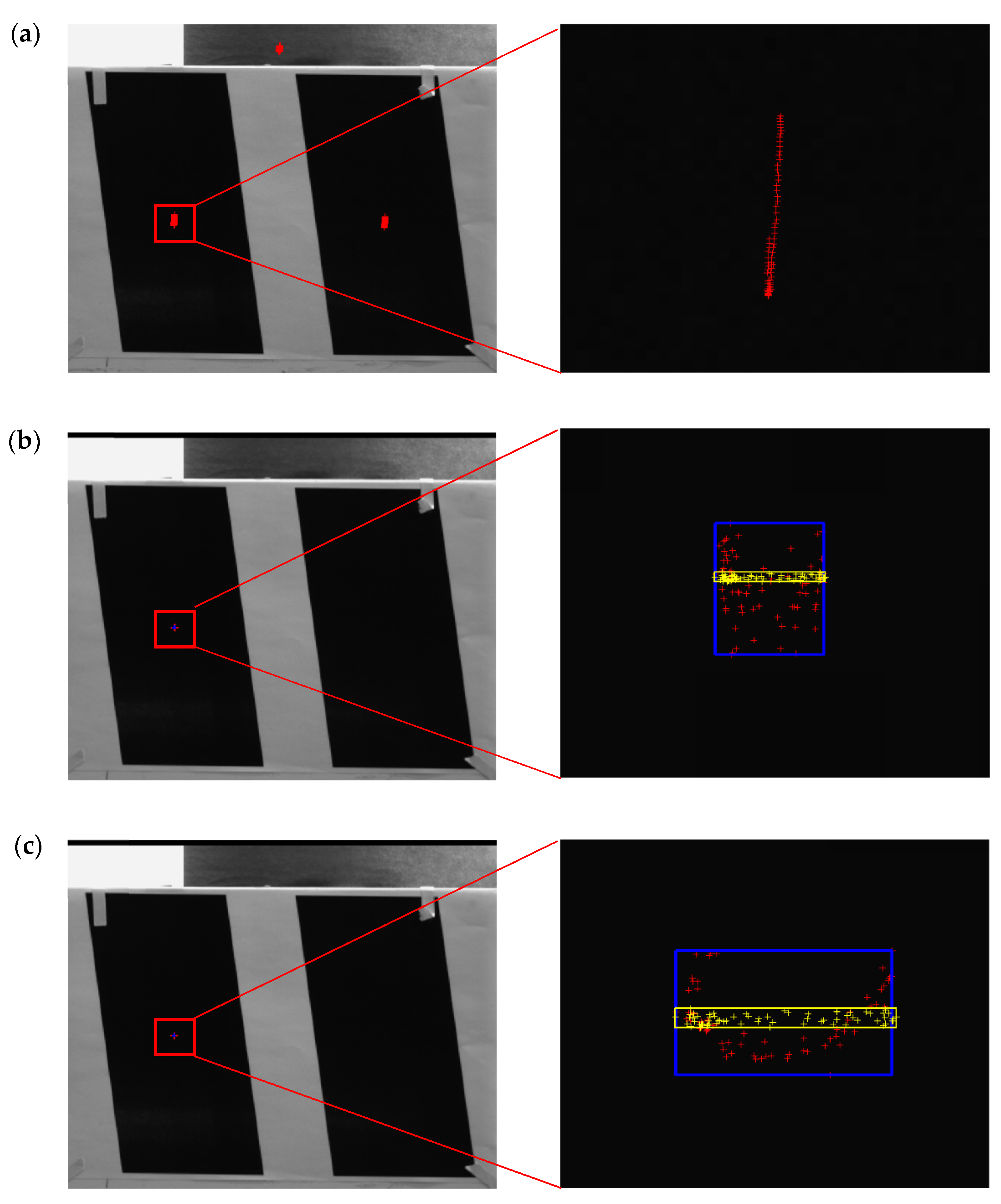
3.2. Laboratory Equipment Simulation Experiments
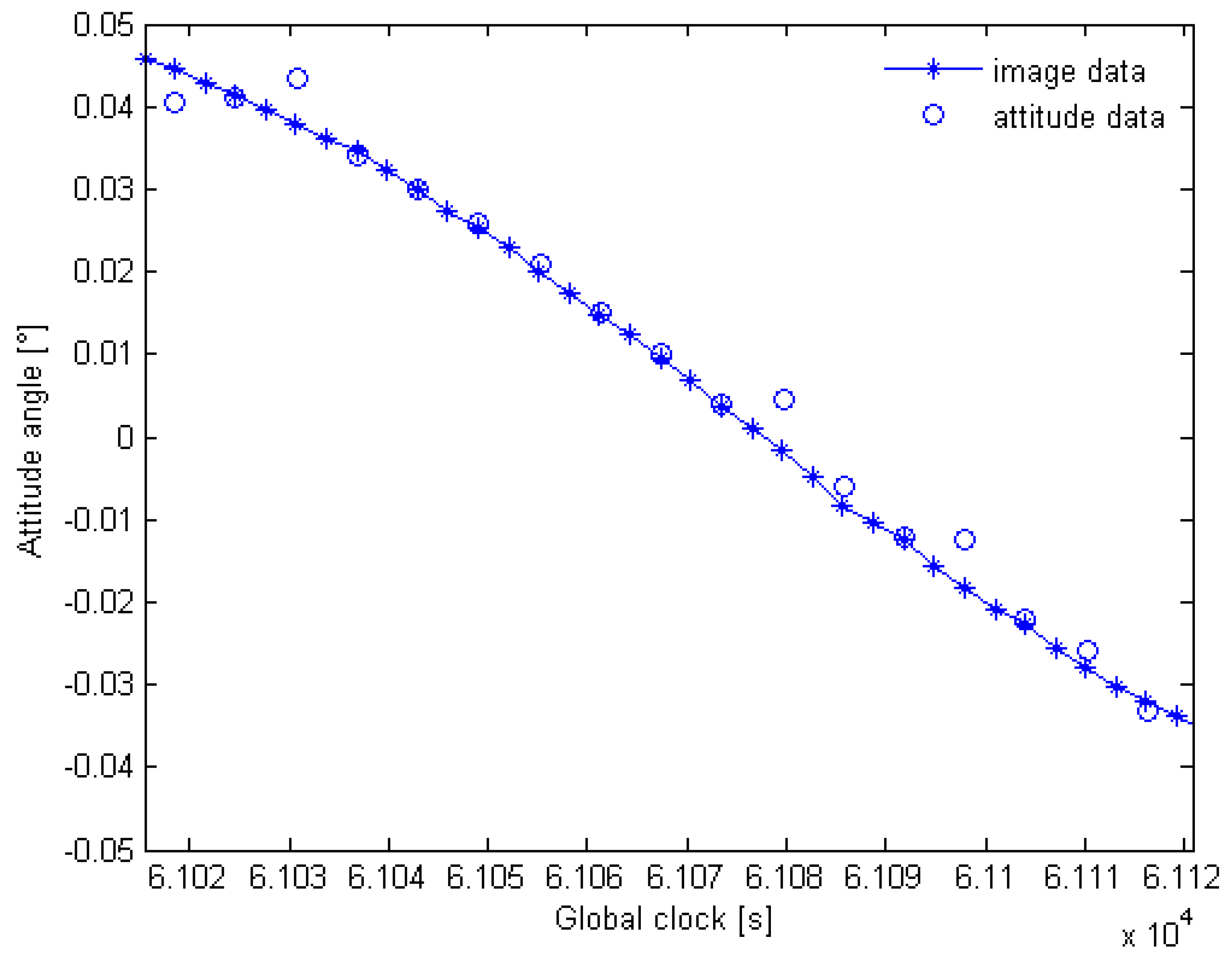
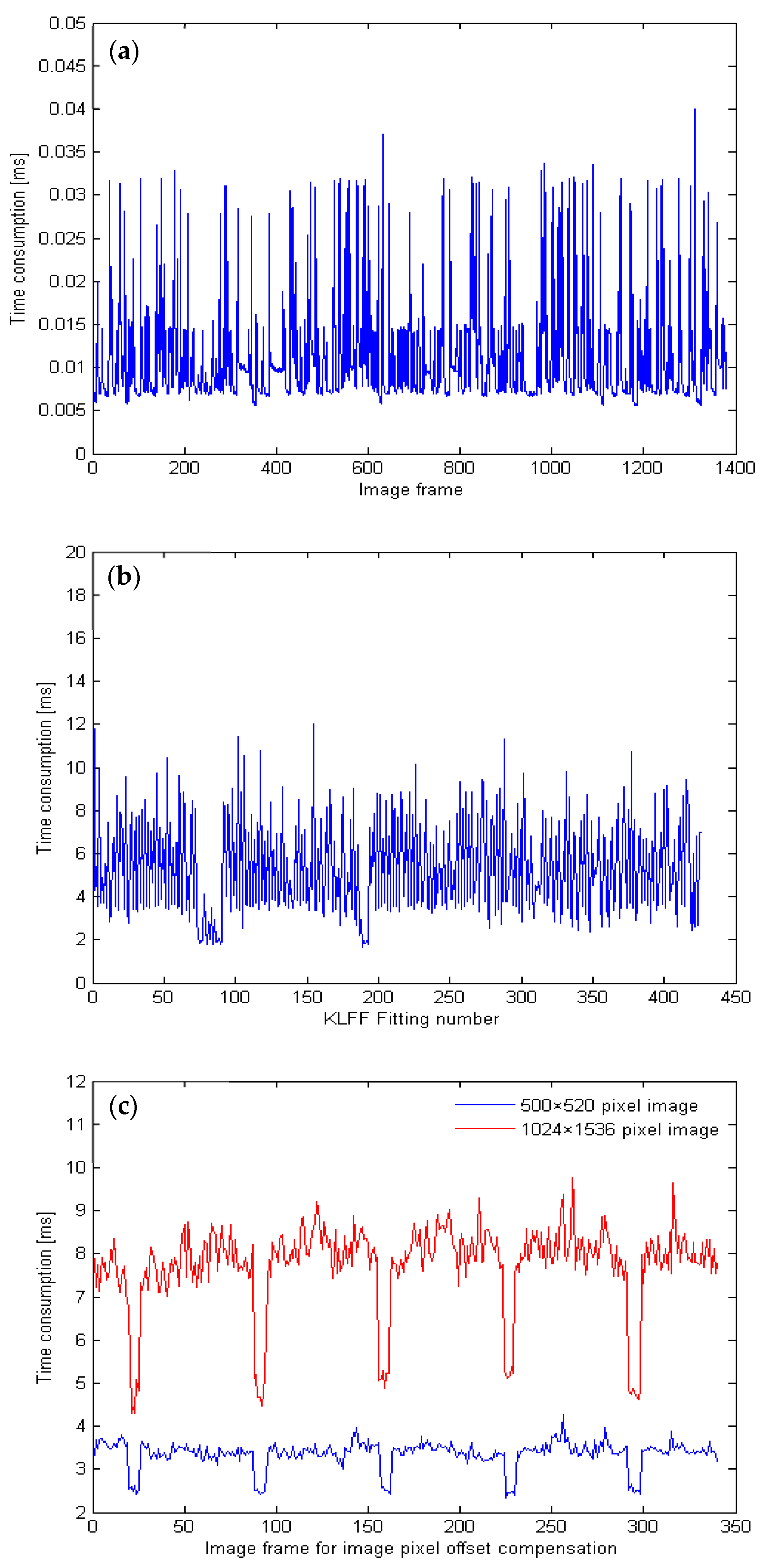
3.3. Algorithm Stability and Real-Time Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guang, H.W.; Shi, C.X.; Biao, C. The Effects of Attitude Deviation on AVHRR Image Navigation. J. Remote Sens. 2005, 02, 138–142. [Google Scholar]
- Xiu, L.L.; Wei, G.H.; Chang, B.Z.; Jin, S.Y. A Method for Fast Resampling of Remote Sensing Imagery. J. Remote Sens. 2002, 02, 96–101. [Google Scholar] [CrossRef]
- Jiang, Y.; Cui, Z.; Zhang, G.; Wang, J.; Xu, M.; Zhao, Y.; Xu, Y. CCD distortion calibration without accurate ground control data for pushbroom satellites. ISPRS J. Photogramm. Remote Sens. 2018, 142, 21–26. [Google Scholar] [CrossRef]
- Rui, Y.; Wei, Y.C.; Yang, Y.; Kun, Y.; Yi, L. Remote sensing image registration of small unmanned aerial vehicles based on inlier maximization and outlier control. J. Remote Sens. 2020, 24, 1325–1341. [Google Scholar] [CrossRef]
- Patel, M.I.; Thakar, V.K.; Shah, S.K. Image Registration of Satellite Images with Varying Illumination Level Using HOG Descriptor Based SURF. Procedia Comput. Sci. 2016, 93, 382–388. [Google Scholar] [CrossRef]
- Saleem, S.; Bais, A.; Sablatnig, R. Towards feature points based image matching between satellite imagery and aerial photographs of agriculture land. Comput. Electron. Agric. 2016, 126, 12–20. [Google Scholar] [CrossRef]
- Yuan, X.Y.; Meng, M.W.; Chao, Y.; Zhi, R.Y.; Xu, M.G. A multi-sensor remote sensing registration method and system based on dense feature of orientated phase. Natl. Remote Sens. Bull. 2022, 1–13. [Google Scholar] [CrossRef]
- Huang, Y.; Qian, X.; Chen, S. Multi-sensor calibration through iterative registration and fusion. Comput.-Aided Des. 2009, 41, 240–255. [Google Scholar] [CrossRef]
- Yeom, J.-M.; Roujean, J.-L.; Han, K.-S.; Lee, K.-S.; Kim, H.-W. Thin cloud detection over land using background surface reflectance based on the BRDF model applied to Geostationary Ocean Color Imager (GOCI) satellite data sets. Remote Sens. Environ. 2020, 239, 111610. [Google Scholar] [CrossRef]
- Gang, S.; Zai, H.Y.; Bi, L.W.; Cheng, L.Z.; Wei, B.D. High precision automatic measurement for alignment of camera and star-sensor in GF-2. Opt. Precis. Eng. 2017, 25, 2931–2938. [Google Scholar] [CrossRef]
- Lei, X. Research on Satellite Attitude Determination Method Based on the Combination of Star-Sensor and Gyroscope. Master’s Thesis, Changchun Institute of Optics, Fine Mechanics and Physics, Changchun, China, 2021. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1021043031.nh&DbName=CMFD2021 (accessed on 13 July 2022).
- Chuan, X.W. Research on Kinetics of the Image Stabilization System in Space Telescope. Ph.D. Thesis, Shanghai Institute of Technical Physics of the Chinese Academy of Sciences, Shanghai, China, 2016. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1016728635.nh&DbName=CDFD2016 (accessed on 13 July 2022).
- Shi, C.; Zhang, L.; Wei, H.; Liu, S. Attitude-sensor-aided in-process registration of multi-view surface measurement. Measurement 2011, 44, 663–673. [Google Scholar] [CrossRef]
- Hajiyev, C.; Cilden, D.; Somov, Y. Gyro-free attitude and rate estimation for a small satellite using SVD and EKF. Aerosp. Sci. Technol. 2016, 55, 324–331. [Google Scholar] [CrossRef]
- Lei, L.; Jan, F.C. Orbit Determination of High-Orbit Space Targets Based on Space-Based Optical Angle Measurement. Acta Opt. Sin. 2021, 41, 155–161. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=GXXB202119016&DbName=DKFX2021 (accessed on 15 July 2022).
- Yue, F.Q.; Chen, B.G.; Bi, T.C.; Zi, Y.L.; Ting, N.H.; Fang, K.L.; Cui, J. Design and Analysis of Fiber Optic Gyroscope Based on Modulator Mid-Mounted Structure. Acta Opt. Sin. 2022, 42, 24–31. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=GXXB202202003&DbName=DKFX2022 (accessed on 15 July 2022).
- Wei, Z.W.; Yan, W.; Yan, B.Y.; Jing, J.D.; Yun, H.Z.; Wei, J.G. Accuracy determination for sub-arcsec star camera. Infrared Laser Eng. 2018, 47, 244–250. [Google Scholar] [CrossRef]
- Yan, X.W.; Hong, B.W.; Ji, Z.Z.; Ling, J.W.; Yang, Z.; Xin, Z. Optical System Design of Star Camera with High Precision Better than Second Level. Chin. J. Lasers 2015, 42, 320–329. [Google Scholar] [CrossRef]
- Guo, Y.; Yin, N.; Wu, W.; Huang, J.; Wang, Q. A Remote Sensing Satellite Lighting Detection System With High Detection Rate and Low Complexity. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2022, 43, 101–106. [Google Scholar] [CrossRef]
- Huebner, C. Turbulence Mitigation of Short Exposure Image Data Using Motion Detection and Background Segmentation; SPIE: Bellingham, DC, USA, 2012; Volume 8355. [Google Scholar] [CrossRef]
- Jan, M.W.; Te, L. Research on position interpolation of BDS-3 satellite. Bull. Surv. Mapp. 2021, 12, 50–53. [Google Scholar] [CrossRef]
- Cheng, C.F. Research on High Precision Processing Methods for High Resolution Optical Satellite’s Jitter Measurement Data. Ph.D. Thesis, Wuhan University, Wuhan, China, 2017. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1017192103.nh&DbName=CDFD2020 (accessed on 5 July 2022).
- Wang, M.; Zhu, Y.; Jin, S.; Pan, J.; Zhu, Q. Correction of ZY-3 image distortion caused by satellite jitter via virtual steady reimaging using attitude data. ISPRS J. Photogramm. Remote Sens. 2016, 119, 108–123. [Google Scholar] [CrossRef]
- Bloßfeld, M.; Zeitlhöfler, J.; Rudenko, S.; Dettmering, D. Observation-Based Attitude Realization for Accurate Jason Satellite Orbits and Its Impact on Geodetic and Altimetry Results. Remote Sens. 2020, 12, 682. [Google Scholar] [CrossRef]
- Loyer, S.; Banville, S.; Geng, J.; Strasser, S. Exchanging satellite attitude quaternions for improved GNSS data processing consistency. Adv. Space Res. 2021, 68, 2441–2452. [Google Scholar] [CrossRef]
- Ding, W.; Jiang, Y.; Lyu, Z.; Liu, B.; Gao, Y. Improved attitude estimation accuracy by data fusion of a MEMS MARG sensor and a low-cost GNSS receiver. Measurement 2022, 194, 111019. [Google Scholar] [CrossRef]
- Li, L.; Wang, F. An attitude estimation scheme for nanosatellite using micro sensors based on decentralized information fusion. Optik 2021, 239, 166886. [Google Scholar] [CrossRef]
- He, Y.; Wang, H.; Feng, L.; You, S.; Lu, J.; Jiang, W. Centroid extraction algorithm based on grey-gradient for autonomous star sensor. Optik 2019, 194, 162932. [Google Scholar] [CrossRef]
- Chen, C.-H.; Lin, M.-Y.; Shih, Y.-C.; Chen, C.-C. High-precision time synchronization chip design for industrial sensor and actuator network. Microprocess. Microsyst. 2022, 91, 104507. [Google Scholar] [CrossRef]
- Adhikari, P.M.; Hooshyar, H.; Fitsik, R.J.; Vanfretti, L. Precision timing and communication networking experiments in a real-time power grid hardware-in-the-loop laboratory. Sustain. Energy Grids Netw. 2021, 28, 100549. [Google Scholar] [CrossRef]
- Serrano, F.E.; Ghosh, D. Robust stabilization and synchronization in a network of chaotic systems with time-varying delays. Chaos Solitons Fractals 2022, 159, 112134. [Google Scholar] [CrossRef]
- Tirandaz, H.; Karmi-Mollaee, A. Modified function projective feedback control for time-delay chaotic Liu system synchronization and its application to secure image transmission. Optik 2017, 147, 187–196. [Google Scholar] [CrossRef]
- Jing, L. Research on High Stability Pointing Control Technology of Optical Remote Sensing Satellite in High Orbit. Master’s Thesis, Dalian University of Technology, Dalian, China, 2017. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=1017822059.nh&DbName=CMFD2018 (accessed on 15 July 2022).
- McEwen, A.S.; Banks, M.E.; Baugh, N.; Becker, K.; Boyd, A.; Bergstrom, J.W.; Beyer, R.A.; Bortolini, E.; Bridges, N.T.; Byrne, S.; et al. The High Resolution Imaging Science Experiment (HiRISE) during MRO’s Primary Science Phase (PSP). Icarus 2010, 205, 2–37. [Google Scholar] [CrossRef]
- Schwind, P.; Müller, R.; Palubinskas, G.; Storch, T. An in-depth simulation of EnMAP acquisition geometry. ISPRS J. Photogramm. Remote Sens. 2012, 70, 99–106. [Google Scholar] [CrossRef]
- Pan, J.; Che, C.; Zhu, Y.; Wang, M. Satellite Jitter Estimation and Validation Using Parallax Images. Sensors 2017, 17, 83. [Google Scholar] [CrossRef] [PubMed]
- Yi, Q.S.; Hui, Z. An Iterative Extended Kalman Filter Method for AHRS Orientation Estimation. Mach. Des. Manuf. 2022, 4, 270–274. [Google Scholar] [CrossRef]
- Kavitha, S.; Mula, P.; Kamat, M.; Nirmala, S.; Manathara, J.G. Extended Kalman filter-based precise orbit estimation of LEO satellites using GPS range measurements. IFAC-PapersOnLine 2022, 55, 235–240. [Google Scholar] [CrossRef]
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Tan, C.; Xu, G.; Dong, L.; Xie, Y.; He, Y.; Hao, Y.; Han, F. Rotation matrix-based finite-time attitude coordinated control for spacecraft. Adv. Space Res. 2022, 69, 976–988. [Google Scholar] [CrossRef]
- Pin, L.; Jun, F.X.; Fan, M.; Fei, X.X. Research on Satellite Attitude Jitter Based on Stellar Motion Trajectory. Geomat. Spat. Inf. Technol. 2018, 41, 25–28+33. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?FileName=DBCH201806009&DbName=CJFQ2018 (accessed on 15 July 2022).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Frame Interval (ms) | Attitude Frequency (Hz) | Data Ratio | Attitude Amplitude (°) | Microvibration Amplitude (10−3°) | Attitude Change Rate (10−3°/s) | Sampling Accuracy (10−3°) |
|---|---|---|---|---|---|---|---|
| Actual parameters of the satellite | 20.0 | 0.300 | 1:3 | 0.03 | 1.4 | 0.2 | 0.15 |
| Design parameters of the simulation experiment | 3000.0 | 0.003 | 1:2 | 0.05 | 5.0 | 4.0 | 2.00 |
| Fitting Method | Angle Difference Mean (10−3°) | Angle Difference Peak (10−3°) | Pixel Difference Mean (Pixel) | Pixel Difference Peak (Pixel) |
|---|---|---|---|---|
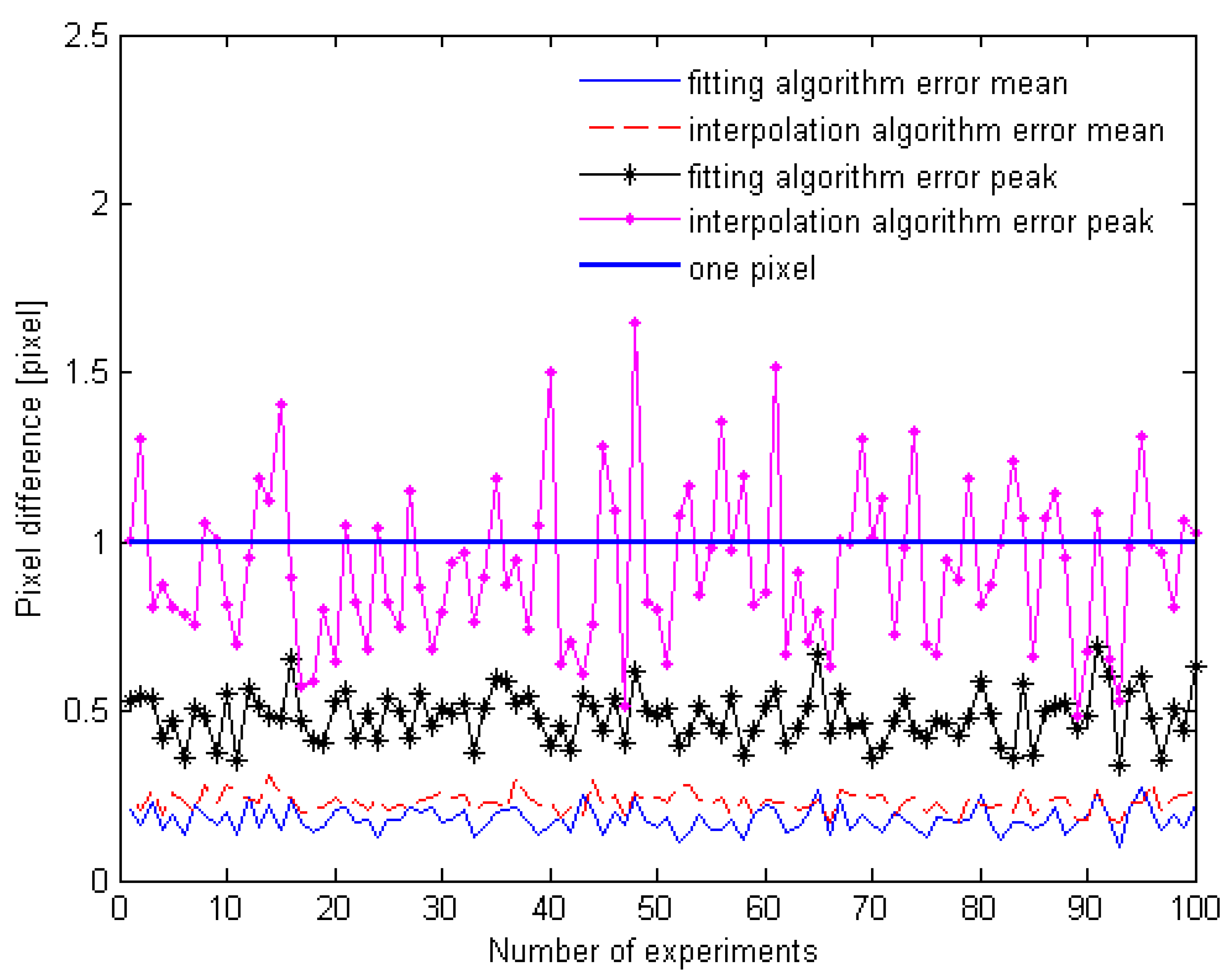
| Time weight interpolation | 1.69 | 6.41 | 0.292 | 1.112 |
| Adaptive Kalman-like filter | 0.96 | 3.51 | 0.165 | 0.602 |
| Fitting Method | Fit Error Mean Range | Fit Error Mean Median | Fit Error Peak Range | Fit Error Peak Median | ||||
|---|---|---|---|---|---|---|---|---|
| Angle (10−3°) | Pixel (Pixel) | Angle (10−3°) | Pixel (Pixel) | Angle (10−3°) | Pixel (Pixel) | Angle (10−3°) | Pixel (Pixel) | |
| Interpolation | 0.98 ~1.8 | 0.169 ~0.310 | 1.39 | 0.2395 | 2.8 ~9.6 | 0.484 ~1.658 | 6.2 | 1.071 |
| KLFF | 0.58 ~1.6 | 0.100 0.276 | 1.09 | 0.1880 | 1.9 ~4.0 | 0.328 ~0.691 | 2.5 | 0.509 |
| Lift Ratio (%) | / | / | 21.58 | 21.50 | / | / | 59.68 | 52.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Dong, F.; Fu, Y. Prediction Algorithm for Satellite Instantaneous Attitude and Image Pixel Offset Based on Synchronous Clocks. Remote Sens. 2022, 14, 3941. https://doi.org/10.3390/rs14163941
Huang L, Dong F, Fu Y. Prediction Algorithm for Satellite Instantaneous Attitude and Image Pixel Offset Based on Synchronous Clocks. Remote Sensing. 2022; 14(16):3941. https://doi.org/10.3390/rs14163941
Chicago/Turabian StyleHuang, Lingfeng, Feng Dong, and Yutian Fu. 2022. "Prediction Algorithm for Satellite Instantaneous Attitude and Image Pixel Offset Based on Synchronous Clocks" Remote Sensing 14, no. 16: 3941. https://doi.org/10.3390/rs14163941
APA StyleHuang, L., Dong, F., & Fu, Y. (2022). Prediction Algorithm for Satellite Instantaneous Attitude and Image Pixel Offset Based on Synchronous Clocks. Remote Sensing, 14(16), 3941. https://doi.org/10.3390/rs14163941