

A Novel Dual-Branch Neural Network Model for Flood Monitoring in South Asia Based on CYGNSS Data


Abstract
:
1. Introduction
2. Data and Study Area
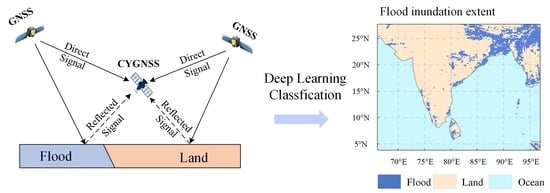
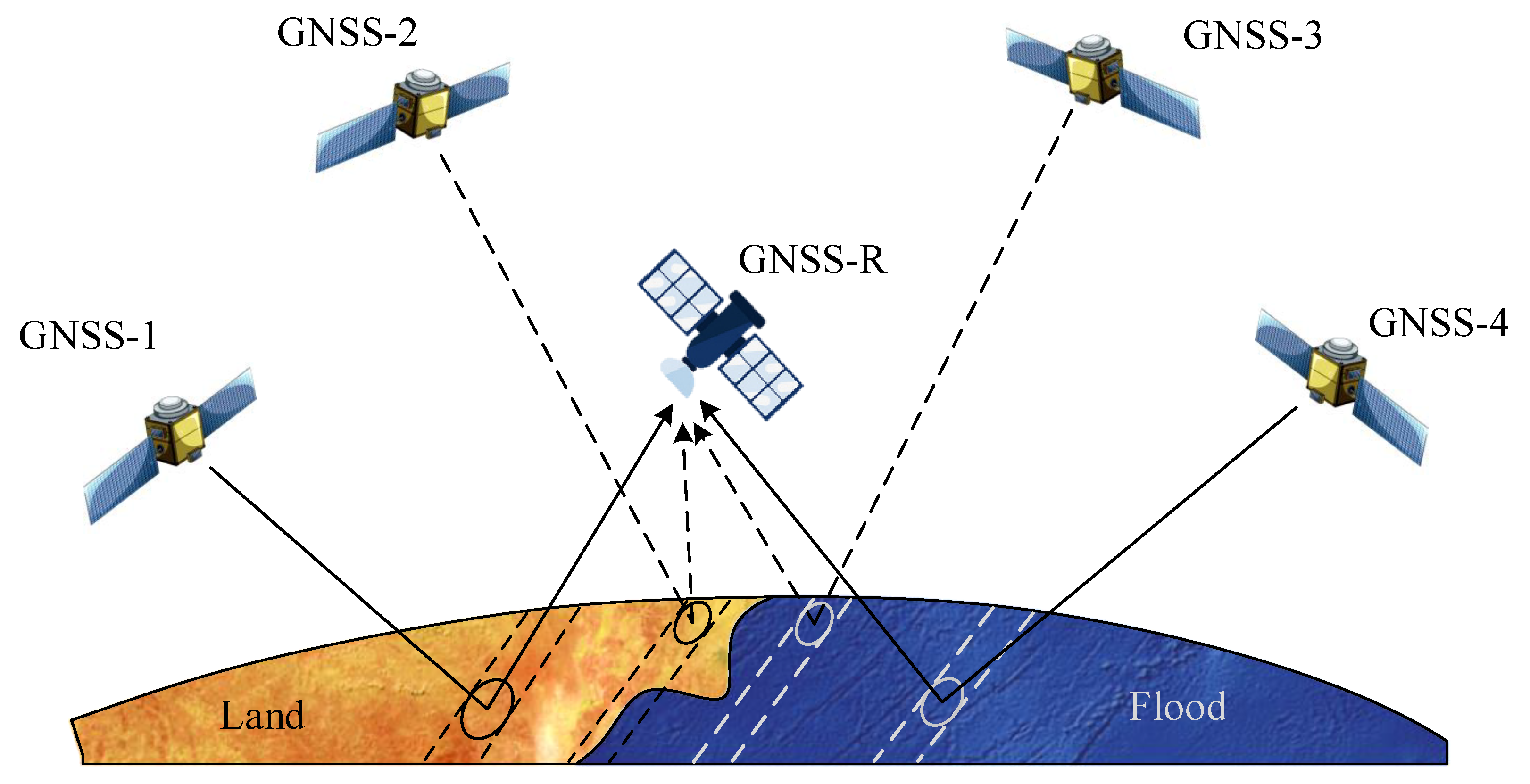
2.1. CYGNSS Data
2.2. SMAP Data
2.3. Study Area
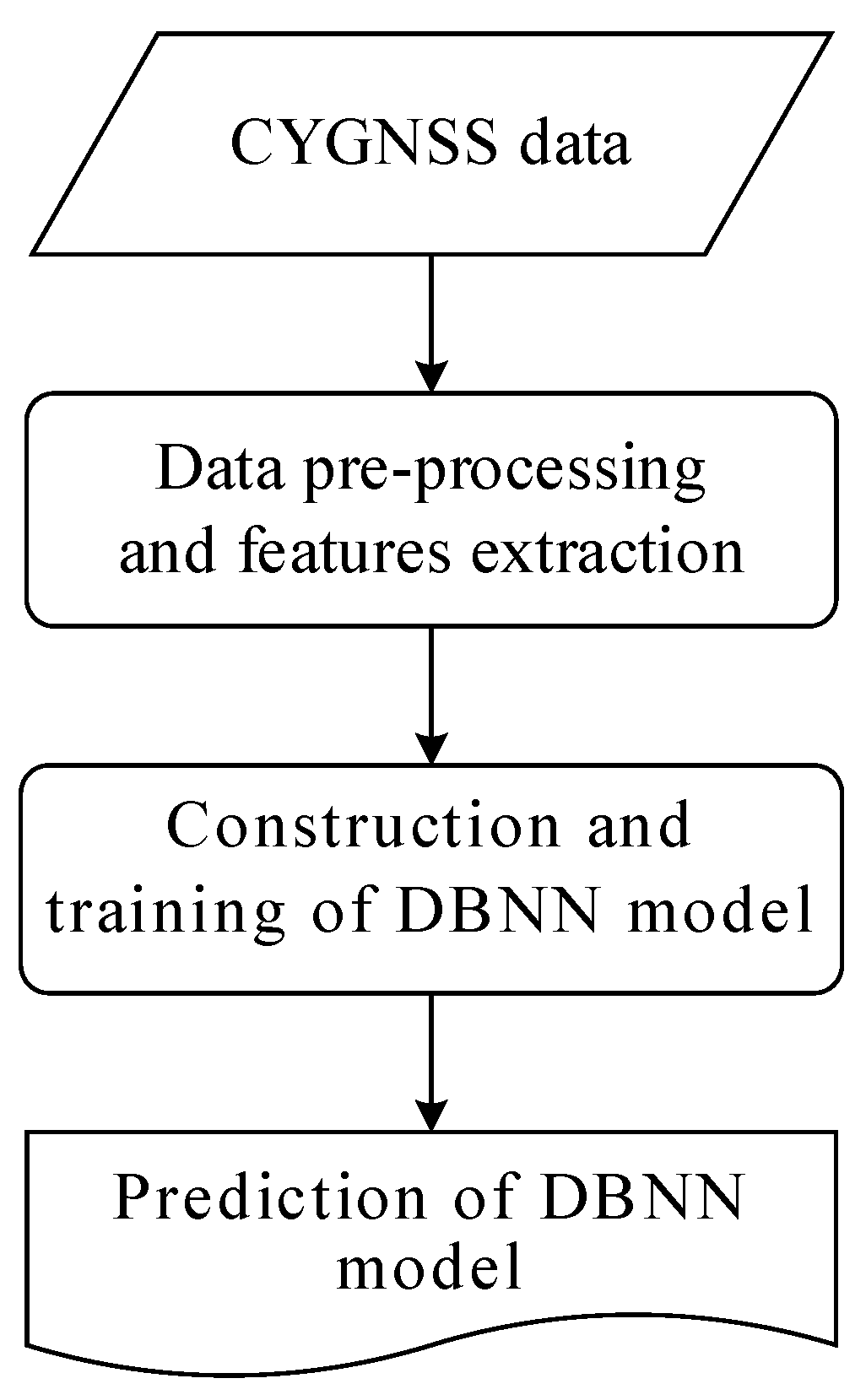
3. Method
3.1. Data Pre-Processing and Features Extraction
- (1)
- If the SNR of DDM is too small, there are fewer signals and more noise in the DDM. Therefore, the DDMs are filtered out with SNR less than 1.5 dB.
- (2)
- The left-handed circular polarization signals received by CYGNSS decrease with the increase of the incident angle. When the incident angle is larger than 65°, the proportion of the left-handed circular polarization signals rapidly decreases; thus, DDMs with the incident angle larger than 65° are filtered out in this study [7,38].
- (3)
- (4)
- The positions of the peak points move toward the edge of DDMs with altitude, and the DTU10 digital elevation model used by CYGNSS does not sufficiently consider the effect of land topography, which results in significant errors in the estimation of positions of specular points with elevations greater than 600 m [23]. Thus, in this study, only DDMs with peak points occurring in delay bins inside of 7–10 pixels are retained [38].
3.2. Construction and Training of DBNN Model
3.2.1. Construction of DBNN Model
3.2.2. Training of DBNN Model
- (1)
- Initialize the parameters of the neural network, and input the training data into the neural network.
- (2)
- Proceed forward propagation and compute the loss function using Formula (6).
- (3)
- Update the parameters in the neural network by means of the back propagation and Adam optimizer.
- (4)
- Complete the training when the variation of the loss function values is less than 0.001 among ten consecutive epochs, or the training times reach the preset number of iterations.
3.3. Prediction of DBNN Model
4. Results and Discussion
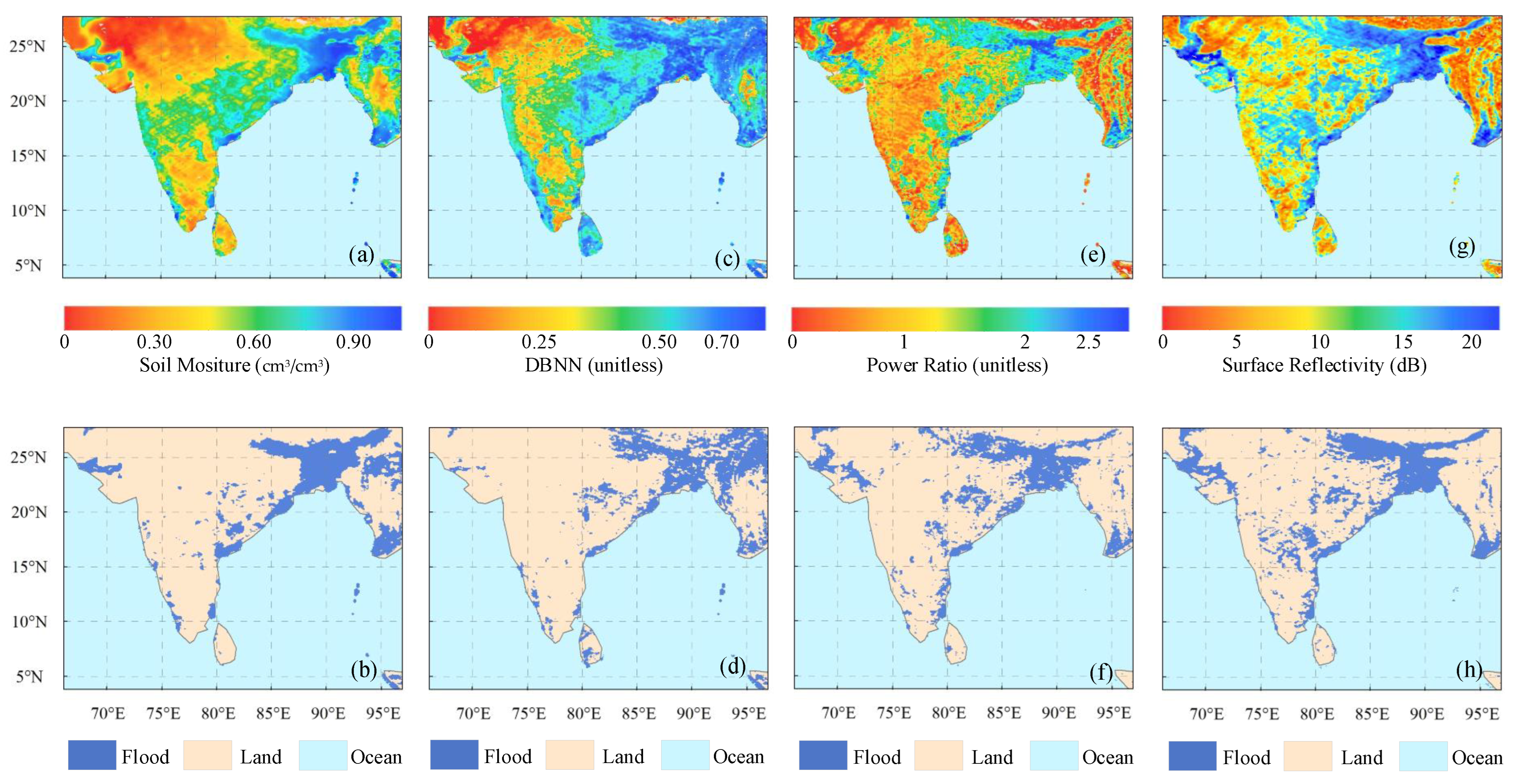
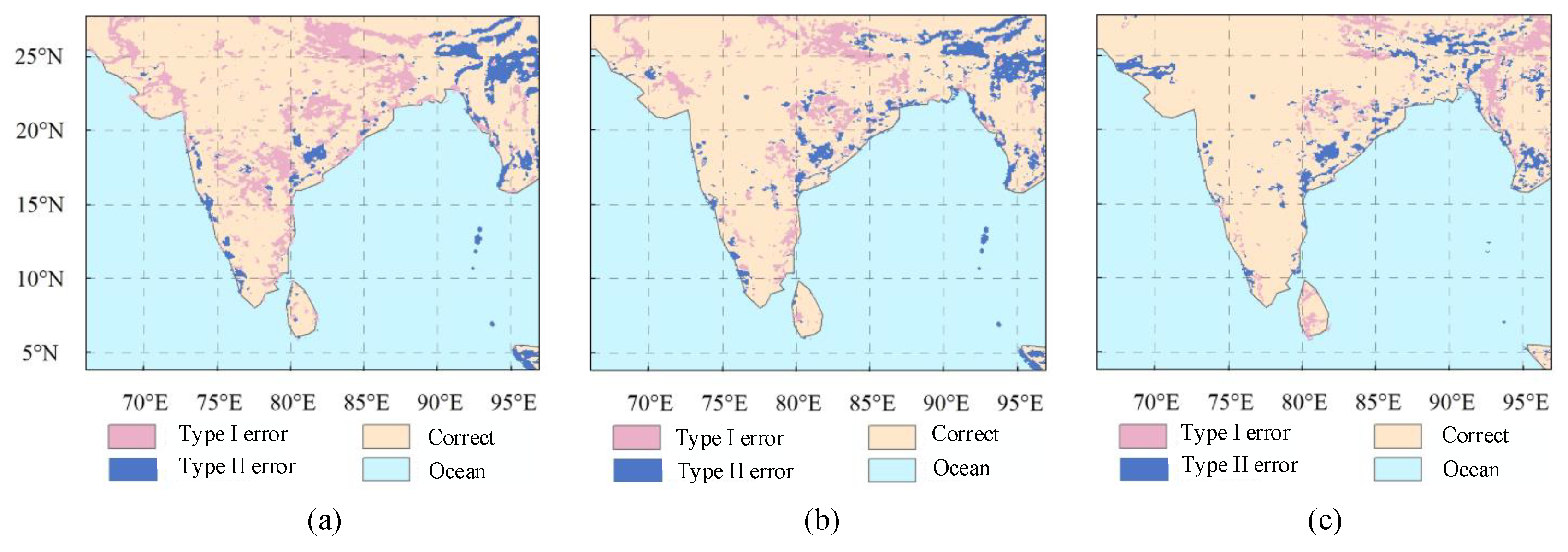
4.1. Effectiveness Validation
4.2. Spatio-Temporal Analysis of Flood Inundation
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BP | Back Propagation |
| CNN | Convolutional Neural Network |
| CYGNSS | Cyclone Global Navigation Satellite System |
| DBNN | Dual-branch neural network |
| DDM | Delay-Doppler map |
| DL | Deep Learning |
| GNSS-R | Global Navigation Satellite System-Reflectometry |
| PR | Power ratio |
| SMAP | Soil Moisture Active Passive satellite |
| SR | Surface reflectivity |
References
- Diakakis, M.; Boufidis, N.; Grau, J.M.S.; Andreadakis, E.; Stamos, I. A systematic assessment of the effects of extreme flash floods on transportation infrastructure and circulation: The example of the 2017 Mandra flood. Int. J. Disaster Risk Reduct. 2020, 47, 101542. [Google Scholar] [CrossRef]
- Messner, F.; Meyer, V. Flood damage, vulnerability and risk perception—Challenges for flood damage research. In Flood Risk Management: Hazards, Vulnerability and Mitigation Measures; Springer: Dordrecht, The Netherlands, 2006; pp. 149–167. [Google Scholar]
- Sharafi, S.; Kamangir, H.; King, S.A.; Safaierad, R. Effects of extreme floods on fluvial changes: The Khorramabad River as case study (western Iran). Arab. J. Geosci. 2021, 14, 1140. [Google Scholar] [CrossRef]
- Brivio, P.; Colombo, R.; Maggi, M.; Tomasoni, R. Integration of remote sensing data and GIS for accurate mapping of flooded areas. Int. J. Remote Sens. 2002, 23, 429–441. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.D.; Ackerman, S.A.; Menzel, W.P.; Baum, B.A.; Riédi, J.C.; Frey, R.A. The MODIS cloud products: Algorithms and examples from Terra. IEEE Trans. Geosci. Remote Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Gao, F.; Xu, T.; Wang, N.; Tu, J.; Jing, L.; Kong, Y. Daily Flood Monitoring Based on Spaceborne GNSS-R Data: A Case Study on Henan, China. Remote Sens. 2021, 13, 4561. [Google Scholar] [CrossRef]
- Kuenzer, C.; Guo, H.; Huth, J.; Leinenkugel, P.; Li, X.; Dech, S. Flood mapping and flood dynamics of the Mekong Delta: ENVISAT-ASAR-WSM based time series analyses. Remote Sens. 2013, 5, 687–715. [Google Scholar] [CrossRef] [Green Version]
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Alvarez, N.; Camps, A.; Vall-Llossera, M.; Bosch-Lluis, X.; Monerris, A.; Ramos-Perez, I.; Valencia, E.; Marchan-Hernandez, J.F.; Martinez-Fernandez, J.; Baroncini-Turricchia, G. Land geophysical parameters retrieval using the interference pattern GNSS-R technique. IEEE Trans. Geosci. Remote Sens. 2010, 49, 71–84. [Google Scholar] [CrossRef]
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Jales, P.; Unwin, M.; Shaw, A.; Robertson, C.; Rosello, J. Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission. Geophys. Res. Lett. 2015, 42, 5435–5441. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Yu, K.; Qu, F.; Bu, J.; Han, S.; Zhang, K. Spaceborne GNSS-R Wind Speed Retrieval Using Machine Learning Methods. Remote Sens. 2022, 14, 3507. [Google Scholar] [CrossRef]
- Guan, D.; Park, H.; Camps, A.; Wang, Y.; Onrubia, R.; Querol, J.; Pascual, D. Wind direction signatures in GNSS-R observables from space. Remote Sens. 2018, 10, 198. [Google Scholar] [CrossRef] [Green Version]
- Roberts, T.M.; Colwell, I.; Chew, C.; Lowe, S.; Shah, R. A Deep-Learning Approach to Soil Moisture Estimation with GNSS-R. Remote Sens. 2022, 14, 3299. [Google Scholar] [CrossRef]
- Azemati, A.; Melebari, A.; Campbell, J.D.; Walker, J.P.; Moghaddam, M. GNSS-R Soil Moisture Retrieval for Flat Vegetated Surfaces Using a Physics-Based Bistatic Scattering Model and Hybrid Global/Local Optimization. Remote Sens. 2022, 14, 3129. [Google Scholar] [CrossRef]
- Chen, S.; Yan, Q.; Jin, S.; Huang, W.; Chen, T.; Jia, Y.; Liu, S.; Cao, Q. Soil Moisture Retrieval from the CyGNSS Data Based on a Bilinear Regression. Remote Sens. 2022, 14, 1961. [Google Scholar] [CrossRef]
- Chew, C.; Reager, J.T.; Small, E. CYGNSS data map flood inundation during the 2017 Atlantic hurricane season. Sci. Rep. 2018, 8, 9336. [Google Scholar] [CrossRef]
- Wan, W.; Liu, B.; Zeng, Z.; Chen, X.; Wu, G.; Xu, L.; Chen, X.; Hong, Y. Using CYGNSS data to monitor China’s flood inundation during typhoon and extreme precipitation events in 2017. Remote Sens. 2019, 11, 854. [Google Scholar] [CrossRef] [Green Version]
- Chew, C.; Small, E. Estimating inundation extent using CYGNSS data: A conceptual modeling study. Remote Sens. Environ. 2020, 246, 111869. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Pierdicca, N.; Costantini, F.; Floury, N. Analysis of CYGNSS data for soil moisture retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2227–2235. [Google Scholar] [CrossRef]
- Unnithan, S.K.; Biswal, B.; Rüdiger, C. Flood inundation mapping by combining GNSS-R signals with topographical information. Remote Sens. 2020, 12, 3026. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; Gleason, S.; Loria, E.; O’Brien, A.J.; Yi, Y. An algorithm for detecting coherence in cyclone global navigation satellite system mission level-1 delay-Doppler maps. IEEE Trans. Geosci. Remote Sens. 2020, 59, 4454–4463. [Google Scholar] [CrossRef]
- Morris, M.; Chew, C.; Reager, J.T.; Shah, R.; Zuffada, C. A novel approach to monitoring wetland dynamics using CYGNSS: Everglades case study. Remote Sens. Environ. 2019, 233, 111417. [Google Scholar] [CrossRef]
- Dong, Z.; Jin, S. Evaluation of the land GNSS-Reflected DDM coherence on soil moisture estimation from CYGNSS data. Remote Sens. 2021, 13, 570. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Chew, C.; Small, E. Soil moisture sensing using spaceborne GNSS reflections: Comparison of CYGNSS reflectivity to SMAP soil moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef] [Green Version]
- Gleason, S.; Ruf, C.S.; O’Brien, A.J.; McKague, D.S. The CYGNSS level 1 calibration algorithm and error analysis based on on-orbit measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 12, 37–49. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Shah, R.; Chew, C.C.; Johnson, J.T.; Gleason, S. Mapping the Dynamics of the South Asian Monsoon Using CYGNSS’s Level-1 Signal Coherency. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1111–1119. [Google Scholar] [CrossRef]
- Lei, F.; Senyurek, V.; Kurum, M.; Gurbuz, A.C.; Boyd, D.; Moorhead, R.; Crow, W.T.; Eroglu, O. Quasi-global machine learning-based soil moisture estimates at high spatio-temporal scales using CYGNSS and SMAP observations. Remote Sens. Environ. 2022, 276, 113041. [Google Scholar] [CrossRef]
- O’Neill, P.E.; Chan, S.; Njoku, E.G.; Jackson, T.; Bindlish, R.; Chaubell, J. SMAP Enhanced L3 Radiometer Global Daily 9 km EASE-Grid Soil Moisture, 4th ed.; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2020. [Google Scholar]
- Boulder, Colorado USA. NASA National Snow and Ice Data Center Distributed Active Archive Center. Available online: https://nsidc.org/data/spl3smp_e/versions/4 (accessed on 16 October 2021).
- Chaubell, J.; Yueh, S.; Entekhabi, D.; Peng, J. Resolution enhancement of SMAP radiometer data using the Backus Gilbert optimum interpolation technique. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 11–15 July 2016; pp. 284–287. [Google Scholar]
- Guo, W.; Du, H.; Cheong, J.W.; Southwell, B.J.; Dempster, A.G. GNSS-R wind speed retrieval of sea surface based on particle swarm optimization algorithm. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4202414. [Google Scholar] [CrossRef]
- Chew, C.; Small, E. Description of the UCAR/CU soil moisture product. Remote Sens. 2020, 12, 1558. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Spaceborne GNSS-R sea ice detection using delay-Doppler maps: First results from the UK TechDemoSat-1 mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Gao, B.; Pavel, L. On the properties of the softmax function with application in game theory and reinforcement learning. arXiv 2017, arXiv:1704.00805. [Google Scholar]
- Aueb, T.R. One-vs-each approximation to softmax for scalable estimation of probabilities. Adv. Neural Inf. Process. Syst. 2016, 29. [Google Scholar]
- Rahman, M.S.; Di, L.; Shrestha, R.; Eugene, G.Y.; Lin, L.; Zhang, C.; Hu, L.; Tang, J.; Yang, Z. Agriculture flood mapping with Soil Moisture Active Passive (SMAP) data: A case of 2016 Louisiana flood. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017; pp. 1–6. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Comment |
|---|---|---|
| raw_counts | watt | DDM bin raw counts |
| gps_tx_power_db_w | dBi | GPS Space Vehicle transmit power |
| rx_to_sp_range | m | Receiver to specular point range |
| tx_to_sp_range | m | Transmitter to specular point range |
| gps_ant_gain_db_i | dBi | GPS Space Vehicle transmit antenna gain |
| sp_rx_gain | dBi | Specular point receiver antenna gain |
| sp_lat | degree | Specular point latitude |
| sp_lon | degree | Specular point longitude |
| sp_inc_angle | degree | Specular point incident Angle |
| Parameters | Units | Comment |
|---|---|---|
| latitude | degrees_north | Latitude of the center of the Earth based grid cell. |
| longitude | degrees_east | Longitude of the center of the Earth based grid cell. |
| soil_moisture | cm3/cm3 | Representative soil moisture measurement for the Earth based grid cell. |
| surface_temperature | Kelvins | Temperature at land surface based on GMAO GEOS-5 data |
| vegetation_opacity | unitless | The measured opacity of the vegetation used in retrievals in the grid cell. |
| roughness_coefficient | unitless | A unitless value that is indicative of bare soil roughness used in retrievals within the 9 km grid cell. |
| Number | Features Symbol | Features Name |
|---|---|---|
| 1 | DDMA | DDM average |
| 2 | TES | Tail edge of slope |
| 3 | LES | Leading edge of slope |
| 4 | SR | Surface reflectivity |
| 5 | PR | Power ratio |
| 6 | SNR | Signal to noise ratio |
| 7 | Peak | DDM peak value |
| Type I Error (%) | Type II Error (%) | Accuracy (%) | |
|---|---|---|---|
| SR | 10.76 | 9.07 | 80.17 |
| PR | 9.25 | 9.41 | 81.34 |
| DBNN | 7.29 | 7.17 | 85.54 |
| State | Proportion (%) | State | Proportion (%) |
|---|---|---|---|
| West Bengal | 39.83 | Bihar | 89.92 |
| Assam | 16.35 | Narayani Zone | 37.33 |
| Rakhine State | 18.65 | Lumbini Zone | 41.79 |
| Chattogram | 15.88 | Uttar Pradesh | 76.12 |
| Karnali Zone | 25.92 | Odisha | 51.70 |
| Seti Zone | 66.67 | Ayeyarwady | 45.12 |
| Janakpur Zone | 31.84 | Yangon | 67.20 |
| Sagarmatha Zone | 28.44 | Bago | 39.74 |
| Bhojpur | 24.65 | Jharkhand | 65.25 |
| Mechi Zone | 17.12 | Madhya Pradesh | 17.42 |
| Sagaing | 12.26 | Chhattisgarh | 53.82 |
| Rangpur | 19.57 | Magway | 5.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, D.; Zhang, Q.; Wang, B.; Yin, C.; Xia, J. A Novel Dual-Branch Neural Network Model for Flood Monitoring in South Asia Based on CYGNSS Data. Remote Sens. 2022, 14, 5129. https://doi.org/10.3390/rs14205129
Song D, Zhang Q, Wang B, Yin C, Xia J. A Novel Dual-Branch Neural Network Model for Flood Monitoring in South Asia Based on CYGNSS Data. Remote Sensing. 2022; 14(20):5129. https://doi.org/10.3390/rs14205129
Chicago/Turabian StyleSong, Dongmei, Qiqi Zhang, Bin Wang, Cong Yin, and Junming Xia. 2022. "A Novel Dual-Branch Neural Network Model for Flood Monitoring in South Asia Based on CYGNSS Data" Remote Sensing 14, no. 20: 5129. https://doi.org/10.3390/rs14205129
APA StyleSong, D., Zhang, Q., Wang, B., Yin, C., & Xia, J. (2022). A Novel Dual-Branch Neural Network Model for Flood Monitoring in South Asia Based on CYGNSS Data. Remote Sensing, 14(20), 5129. https://doi.org/10.3390/rs14205129