
ATLAS: Latest Advancements and First Observations

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. ATLAS: Overview and Current Status
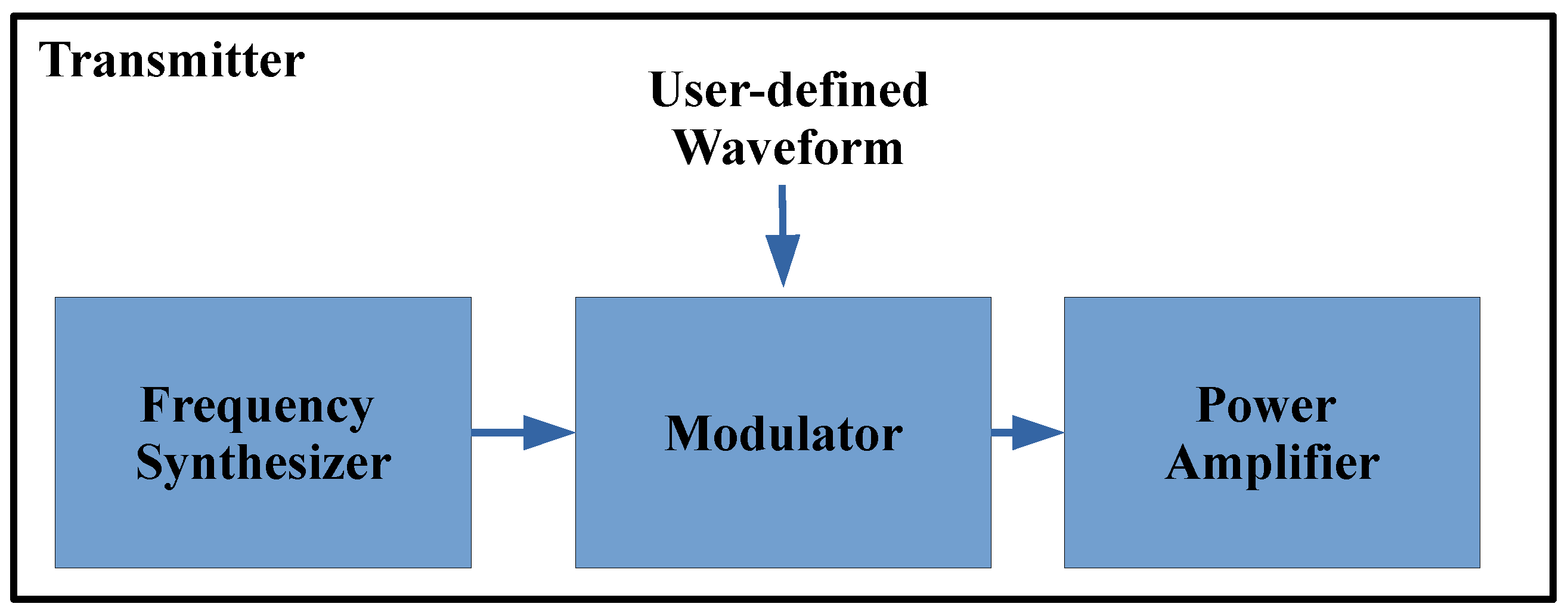
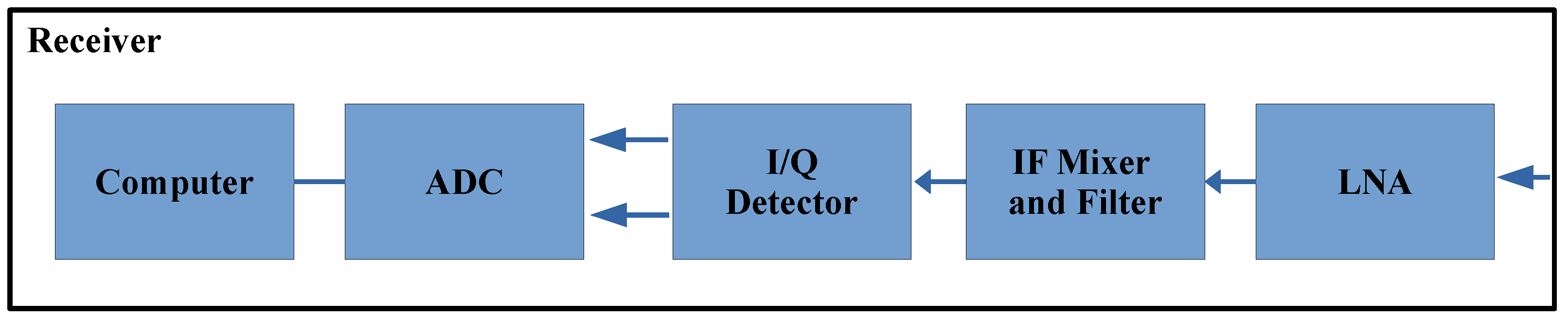
2.2. ATLAS: Technical Summary
2.3. Space Object Tracking in LEO: Error Sources and Observation Strategy
- Use the most recent TLE sets available to reduce propagation errors and unaccounted maneuvers;
- Perform regular calibration routines using celestial sources;
- Use well-behaved satellites that provide precise ephemeris information and/or constantly updated TLEs to refine the pointing system;
2.4. Calibration Procedure
- It can be regularly observed from any point on Earth;
- It radiates at all wavelengths, and the radiation is generally unpolarized [29];
- The solar flux incident on the Earth’s surface varies between 100 and 300 solar flux units. The solar flux is measured constantly by many stations worldwide, and these measurements are public;
- 1.
- Define a vector of N offset angles .
- 2.
- Define a vector of N time instants .
- 3.
- Predict the azimuth positions of the Sun for the defined time instants: .
- 4.
- Compute the scanning positions: .
- 5.
- Point the antenna to positions S at time instants T and compute the power received for each position.
- 6.
- Locate the peak power and update the offset with the new angle value.
- 7.
- Repeat for the elevation angle.
2.5. Signal Model
2.6. Signal Processor
3. Results
3.1. Calibration
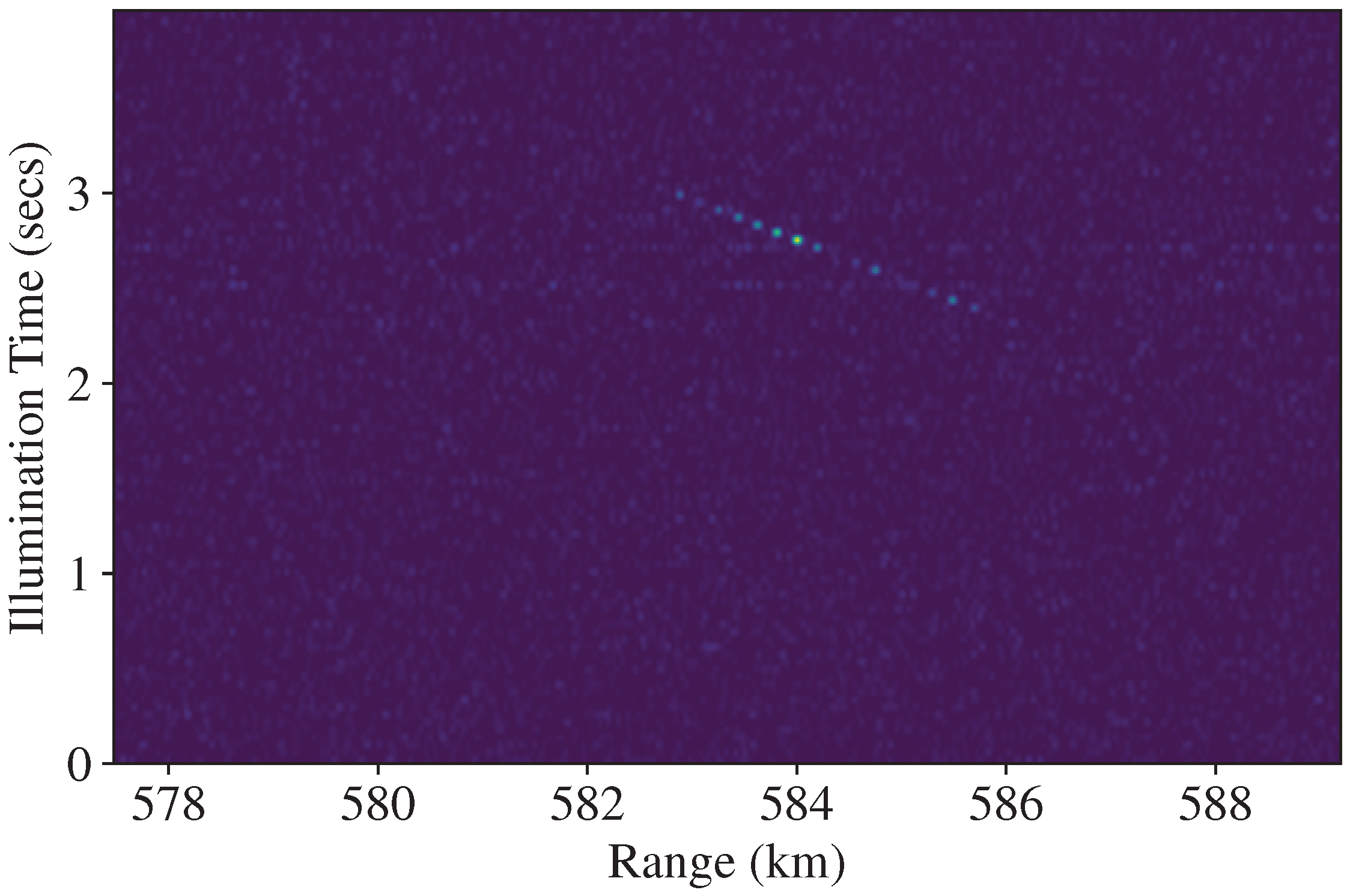
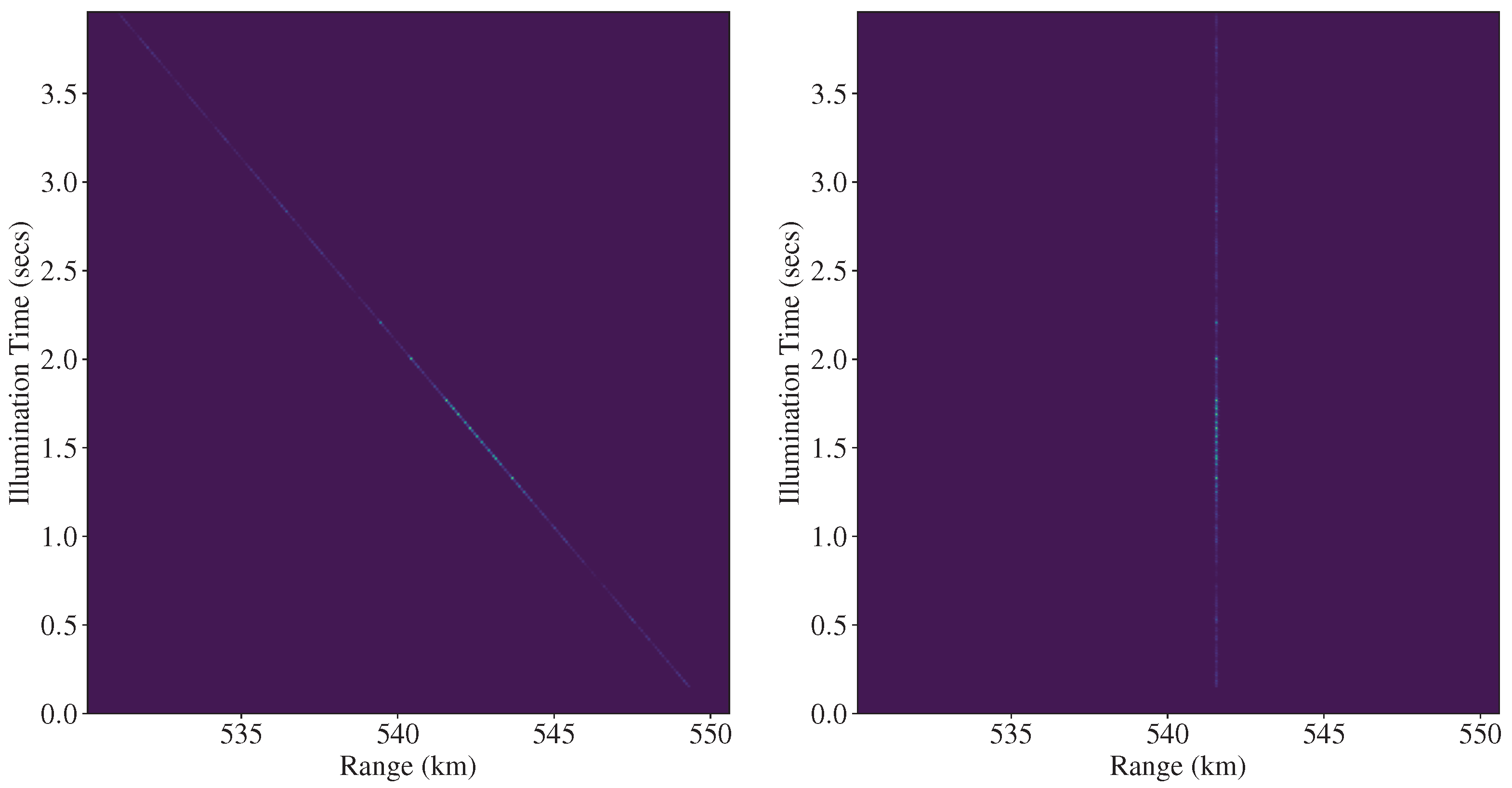
3.2. Space Object Observations
4. Discussion
4.1. Calibration
4.2. Revisiting the Radar Equation
5. Conclusions and Future Work
- Obtain more observations of well-known objects at different ranges and RCSs to obtain a better estimate of the radar’s performance;
- Compare range and range-rate measurements with precise ephemeris to correct unaccounted bias terms;
- Increase the peak power, bandwidth, and PRF of the system to increase the SNR, range resolution, and Doppler resolution.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SSA | Space Situational Awareness |
| SST | Space Surveillance and Tracking |
| ESA | European Space Agency |
| NASA | National Aeronautics and Space Administration |
| EUSST | European Space Surveillance and Tracking |
| ATLAS | rAdio TeLescope pAmpilhosa Serra |
| PASO | Pampilhosa da Serra Space Observatory |
| ACSA | ATLAS Cloud Service API |
| LEO | Low Earth Orbit |
| SGP | Simplified General Perturbation |
| SNR | Signal-to-Noise Ratio |
| PRF | Pulse Repetition Frequency |
| TLE | Two-Line Element |
| RSO | Resident Space Object |
| ISS | International Space Station |
| RCS | Radar Cross-Section |
| MDPI | Multidisciplinary Digital Publishing Institute |
| LIDAR | Light Detection and Ranging |
| ADC | Analogue-to-Digital Converter |
References
- ESA’S Annual Space Environment Report; Technical report; ESA Space Debris Office: Darmstadt, Germany, 2023.
- United Nations Office for Outer Space Affairs. Treaty on Principles Governing the Activities of States in the Exploration and Use of Outer Space, including the Moon and Other Celestial Bodies. Available online: https://www.unoosa.org/oosa/en/ourwork/spacelaw/treaties/introouterspacetreaty.html (accessed on 8 January 2021).
- European Space Agency. SSA Programme Overview. Available online: https://www.esa.int/Space_Safety/SSA_Programme_overview (accessed on 12 February 2024).
- EU SST. Eusst-European Space Surveillance and Tracking Projects. Available online: https://www.eusst.eu (accessed on 12 February 2024).
- Pandeirada, J.; Bergano, M.; Neves, J.; Marques, P.; Barbosa, D.; Coelho, B.; Ribeiro, V. Development of the First Portuguese Radar Tracking Sensor for Space Debris. Signals 2021, 2, 122–137. [Google Scholar] [CrossRef]
- Coelho, B.; Barbosa, D.; Bergano, M.; Correia, A.; Freitas, J.; Marques, P.; Pandeirada, J.; Ribeiro, V. New SST optical sensor of Pampilhosa da Serra—Studies on image processing algorithms and multi-filter characterization of space debris. In Proceedings of the 8th European Conference on Space Debris (Virtual), Darmstadt, Germany, 20–23 April 2021; ESA Space Debris Office: Darmstadt, Germany, 2021; pp. 1–4. [Google Scholar]
- Pandeirada, J.; Bergano, M.; Marques, P.; Barbosa, D.; Freitas, J.; Ribeiro, V. Design of Pulsed Waveforms for Space Debris Detection with Atlas. In Proceedings of the 8th European Conference on Space Debris (Virtual), Darmstadt, Germany, 20–23 April 2021. [Google Scholar]
- Pandeirada, J.; Bergano, M.; Marques, P.; Barbosa, D.; Coelho, B.; Ribeiro, V.; Freitas, J.; Nunes, D.; Eduardo, J. A Portuguese radar tracking sensor for Space Debris monitoring. arXiv 2022, arXiv:2111.02232. [Google Scholar] [CrossRef]
- Pandeirada, J.; Bergano, M.; Marques, P.; Barbosa, D.; Coelho, B.; Freitas, J.; Nunes, D. ATLAS: Deployment, Control Platform and First RSO Measurements. arXiv 2023, arXiv:2211.03586. [Google Scholar] [CrossRef]
- Gonçalves, L.F.P. Space Data Processing Pipeline for PASO (Pipeline de Análise de Detritos Espaciais Para o PASO). Master’s Thesis, University of Aveiro, Aveiro, Portugal, 5 July 2023. [Google Scholar]
- Gonçalves, L.F.P.; Sousa, A. CLOWN: A new tool for cloud detection with an All-Sky camera for optimization of space-debris surveys. In Proceedings of the 73rd International Astronautical Congress (IAC), Paris, France, 18–22 September 2022. [Google Scholar]
- Coelho, B.; Barbosa, D.; Berganoa, M.; Pandeirada, J.; Marques, P.; Correia, A.C.M.; Freitas, J.M.d. Developing a data fusion concept for radar and optical ground based SST station. In Proceedings of the 73rd International Astronautical Congress (IAC), Paris, France, 18–22 September 2022; International Astronautical Federation: Paris, France; pp. 1–3. [Google Scholar]
- Fossa, C.; Raines, R.; Gunsch, G.; Temple, M. An overview of the IRIDIUM (R) low Earth orbit (LEO) satellite system. In Proceedings of the IEEE 1998 National Aerospace and Electronics Conference. NAECON 1998. Celebrating 50 Years (Cat. No.98CH36185), Dayton, OH, USA, 17 July 1998; pp. 152–159, ISSN 0547-3578. [Google Scholar] [CrossRef]
- Flohrer, T.; Krag, H.; Klinkrad, H. Assessment and Categorization of TLE Orbit Errors for the US SSN Catalogue. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 17–19 September 2008. [Google Scholar]
- Kelecy, T.; Hall, D.; Hamada, K.; Stocker, M.D. Satellite Maneuver Detection Using Two-line Element (TLE) Data. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 12–15 September 2007. [Google Scholar]
- Qi, X.; Wang, J.; Zhao, L.; Ji, J. Antenna beam angle calibration method via solar electromagnetic radiation scan. J. Eng. 2019, 2019, 7890–7893. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration Jet Propulsion Laboratory. Horizons System. Available online: https://ssd.jpl.nasa.gov/horizons/ (accessed on 12 February 2024).
- National Aeronautics and Space Administration Jet Propulsion Laboratory. Spot the Station. Available online: https://spotthestation.nasa.gov/trajectory_data.cfm# (accessed on 7 February 2024).
- Vallado, D.A.; McClain, W.D. Fundamentals of Astrodynamics and Applications, 3rd ed.; Number 21 in Space technology library; Microcosm Press: Hawthorne, CA, USA, 2007. [Google Scholar]
- Pearlman, M.R.; Noll, C.E.; Pavlis, E.C.; Lemoine, F.G.; Combrink, L.; Degnan, J.J.; Kirchner, G.; Schreiber, U. The ILRS: Approaching 20 years and planning for the future. J. Geod. 2019, 93, 2161–2180. [Google Scholar] [CrossRef]
- Mochan, J.; Stophel, R.A. Dynamic Calibration of Space Object Tracking Systems. In Proceedings of the Space Congress, Brevard County, FL, USA, 1 April 1968. [Google Scholar]
- Krebs, G.D. Starlette/Stella. Available online: https://space.skyrocket.de/doc_sdat/starlette.htm (accessed on 12 February 2024).
- Richards, M.A.; Scheer, J.A.; Holm, W.A. (Eds.) Principles of Modern Radar: Basic Principles; Institution of Engineering and Technology: London, UK, 2010. [Google Scholar] [CrossRef]
- Whiton, R.C.; Smith, P.L., Jr.; Harbuck, A.C. Calibration of weather radar systems using the sun as a radio source. In Proceedings of the 17th Conference on Radar Meteorology, Seattle, WA, USA, 26–29 October 1976; pp. 60–65. [Google Scholar]
- Mano, K.; Altshuler, E.E. Tropospheric refractive angle and range error corrections utilizing exoatmospheric sources. Radio Sci. 1981, 16, 191–195. [Google Scholar] [CrossRef]
- Huuskonen, A.; Holleman, I. Determining Weather Radar Antenna Pointing Using Signals Detected from the Sun at Low Antenna Elevations. J. Atmos. Ocean. Technol. 2007, 24, 476–483. [Google Scholar] [CrossRef]
- Reimann, J.; Hagen, M. Antenna Pattern Measurements of Weather Radars Using the Sun and a Point Source. J. Atmos. Ocean. Technol. 2016, 33, 891–898. [Google Scholar] [CrossRef]
- Holleman, I.; Huuskonen, A. Analytical formulas for refraction of radiowaves from exoatmospheric sources. Radio Sci. 2013, 48, 226–231. [Google Scholar] [CrossRef]
- Appleton, E.V. Departure of Long-Wave Solar Radiation from Black-Body Intensity. Nature 1945, 156, 534–535. [Google Scholar] [CrossRef]
- Meftah, M.; Corbard, T.; Hauchecorne, A.; Morand, F.; Ikhlef, R.; Chauvineau, B.; Renaud, C.; Sarkissian, A.; Damé, L. Solar radius determined from PICARD/SODISM observations and extremely weak wavelength dependence in the visible and the near-infrared. Astron. Astrophys. 2018, 616, A64. [Google Scholar] [CrossRef]
- Morgan, M. Determination of Earth Station Antenna G/T Using the Sun or the Moon as an RF Source. In Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 4–9 August 2018. [Google Scholar]
- Roy, A.E.; Clarke, D. Astronomy: Principles and Practice, 4th ed.; Institute of Physics Pub: Bristol, UK; Philadelphia, PA, USA, 2003. [Google Scholar]
- Cakaj, S.; Keim, W.; Malaric, K. Sun noise measurement at low Earth orbiting satellite ground station. In Proceedings of the 47th International Symposium ELMAR, Zadar, Croatia, 8–10 June 2005; pp. 345–348. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamentals of Radar Signal Processing, 2nd ed.; McGraw-Hill Education: New York, NY, USA, 2014. [Google Scholar]
- Xu, J.; Yu, J.; Peng, Y.N.; Xia, X.G. Radon-Fourier Transform for Radar Target Detection, I: Generalized Doppler Filter Bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Uysal, F.; Goodman, N. The effect of moving target on range-doppler map and backprojection algorithm for focusing. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5, ISSN 2375-5318. [Google Scholar] [CrossRef]
- Chen, V.C.; Martorella, M. Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications; Institution of Engineering and Technology: London, UK, 2014. [Google Scholar] [CrossRef]
- Tian, J.; Xia, X.G.; Cui, W.; Yang, G.; Wu, S.L. A Coherent Integration Method via Radon-NUFrFT for Random PRI Radar. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2101–2109. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to Radar Systems, 2nd ed.; McGraw-Hill: New York, NY, USA, 1980. [Google Scholar]
- Kraut, S.; Scharf, L.; McWhorter, L. Adaptive subspace detectors. IEEE Trans. Signal Process. 2001, 49, 1–16. [Google Scholar] [CrossRef]
- Pulsone, N.; Rader, C. Adaptive beamformer orthogonal rejection test. IEEE Trans. Signal Process. 2001, 49, 521–529. [Google Scholar] [CrossRef]
- De Maio, A.; Orlando, D. Feature article: A survey on two-stage decision schemes for point-like targets in Gaussian interference. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 20–29. [Google Scholar] [CrossRef]
- Bandiera, F.; Orlando, D.; Ricci, G. A Subspace-Based Adaptive Sidelobe Blanker. IEEE Trans. Signal Process. 2008, 56, 4141–4151. [Google Scholar] [CrossRef]
- Ball, J.E. Low signal-to-noise ratio radar target detection using Linear Support Vector Machines (L-SVM). In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; IEEE: New York, NY, USA, 2014; pp. 1291–1294. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A.; Ricci, G. A k-nearest neighbors approach to the design of radar detectors. Signal Process. 2020, 174, 107609. [Google Scholar] [CrossRef]
- Trunk, G.; Brockett, S. Range and velocity ambiguity resolution. In Proceedings of the The Record of the 1993 IEEE National Radar Conference, Lynnfield, MA, USA, 20–22 April 1993; IEEE: New York, NY, USA, 1993; pp. 146–149. [Google Scholar] [CrossRef]
- Lei, W.; Long, T.; Han, Y. Resolution of range and velocity ambiguity for a medium pulse Doppler radar. In Proceedings of the Record of the IEEE 2000 International Radar Conference [Cat. No. 00CH37037], Alexandria, VA, USA, 12 May 2000; IEEE: New York, NY, USA, 2000; pp. 560–564. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Frequency | 5.56 GHz |
| Peak power | 1.6 kW |
| Waveform | AM Chirp [5] (Section 4) |
| Pulse repetition frequency | 33 Hz |
| Number of pulses | 100 |
| Emitter bandwidth | 2 MHz |
| LNA noise figure (<15 °C) () | 0.7 dB |
| IF filter BW (B) | 80 MHz @ −3dB |
| Maximum sample rate | 100 MS/s |
| NORAD ID | Timestamp | Azimuth (°) | Elevation (°) | Range (km) | Doppler Velocity (m/s) | Velocity (From Line Detection) (m/s) |
|---|---|---|---|---|---|---|
| 25544 | 2023-07-04T 06:51:05 | 91.94 | 57.37 | 502.0 | 0.014 | 623.115 |
| 25544 | 2023-07-06T 23:34:16 | 258.87 | 45.27 | 589.5 | −0.105 | 4407.915 |
| 25544 | 2023-07-13T 21:11:20 | 27.68 | 46.97 | 573.5 | −0.040 | 3931.333 |
| 54216 | 2024-01-31T 12:40:09 | 287.22 | 45.39 | 541.5 | 0.052 | 4653.335 |
| 25544 | 2024-02-02T 18:44:46 | 303.62 | 45.84 | 583.9 | 0.037 | 4593.325 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pandeirada, J.; Bergano, M.; Marques, P.; Coelho, B.; Barbosa, D.; Figueiredo, M. ATLAS: Latest Advancements and First Observations. Remote Sens. 2024, 16, 704. https://doi.org/10.3390/rs16040704
Pandeirada J, Bergano M, Marques P, Coelho B, Barbosa D, Figueiredo M. ATLAS: Latest Advancements and First Observations. Remote Sensing. 2024; 16(4):704. https://doi.org/10.3390/rs16040704
Chicago/Turabian StylePandeirada, João, Miguel Bergano, Paulo Marques, Bruno Coelho, Domingos Barbosa, and Mário Figueiredo. 2024. "ATLAS: Latest Advancements and First Observations" Remote Sensing 16, no. 4: 704. https://doi.org/10.3390/rs16040704
APA StylePandeirada, J., Bergano, M., Marques, P., Coelho, B., Barbosa, D., & Figueiredo, M. (2024). ATLAS: Latest Advancements and First Observations. Remote Sensing, 16(4), 704. https://doi.org/10.3390/rs16040704