
Assessing Handheld Mobile Laser Scanners for Forest Surveys

Abstract
:
1. Introduction
2. Methods
2.1. Instrumentation
2.1.1. FARO Focus 3D
2.1.2. ZEB1

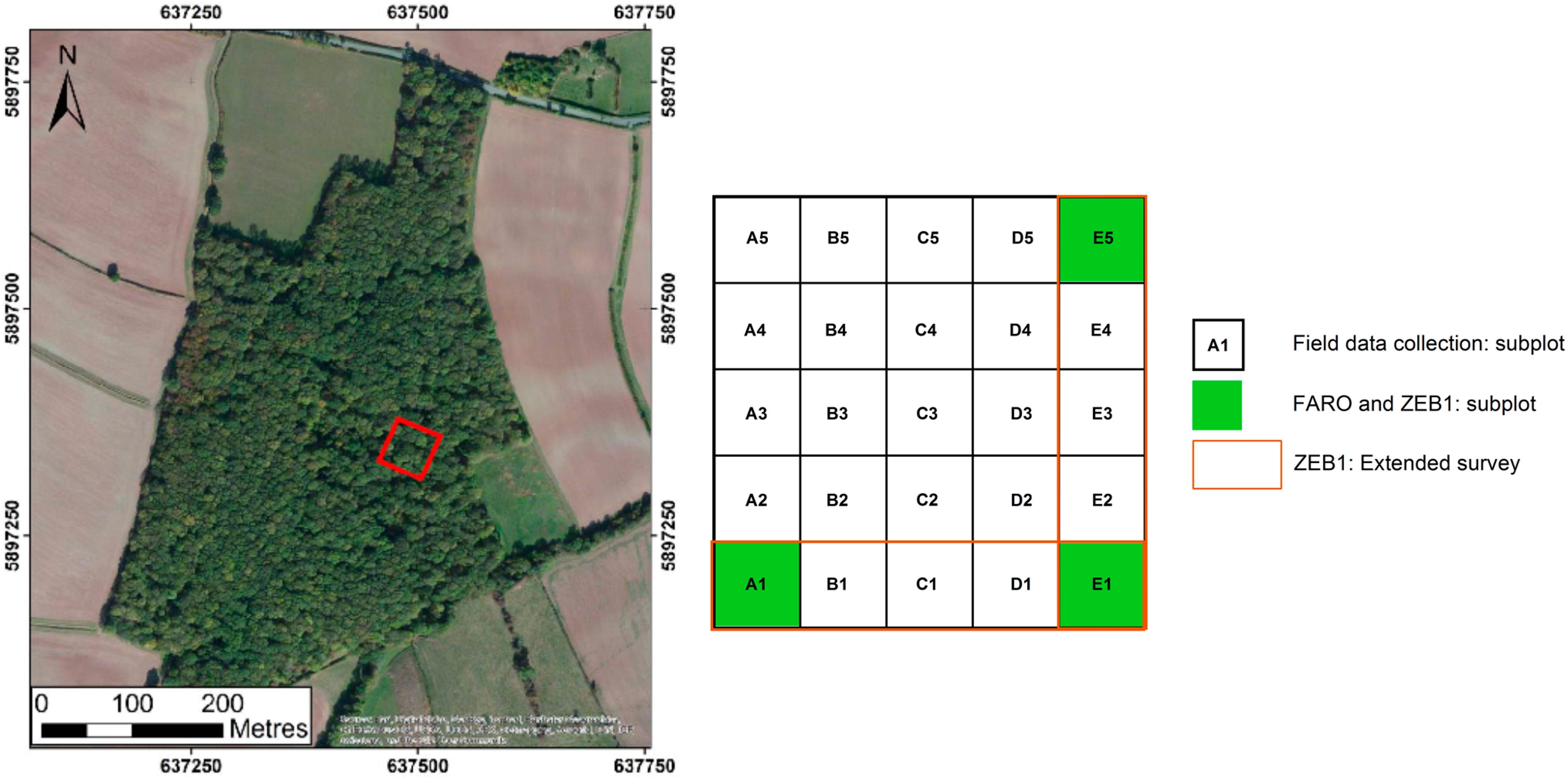
2.2. Test Site Description and Data Collection


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Dominant Species | Secondary Species | DBH Maximum (cm) | DBH Mean (cm) | Stem Density Stems/m2 |
|---|---|---|---|---|---|
| A1 | hawthorn | ash, dogwood, elm | 23.5 | 5.6 | 0.79 |
| E1 | hazel | hawthorn, elm, ash, maple | 25.4 | 5.3 | 0.65 |
| E5 | hawthorn | elm, ash | 45.3 | 8.7 | 0.27 |

2.2.1. FARO Focus 3D Data Collection
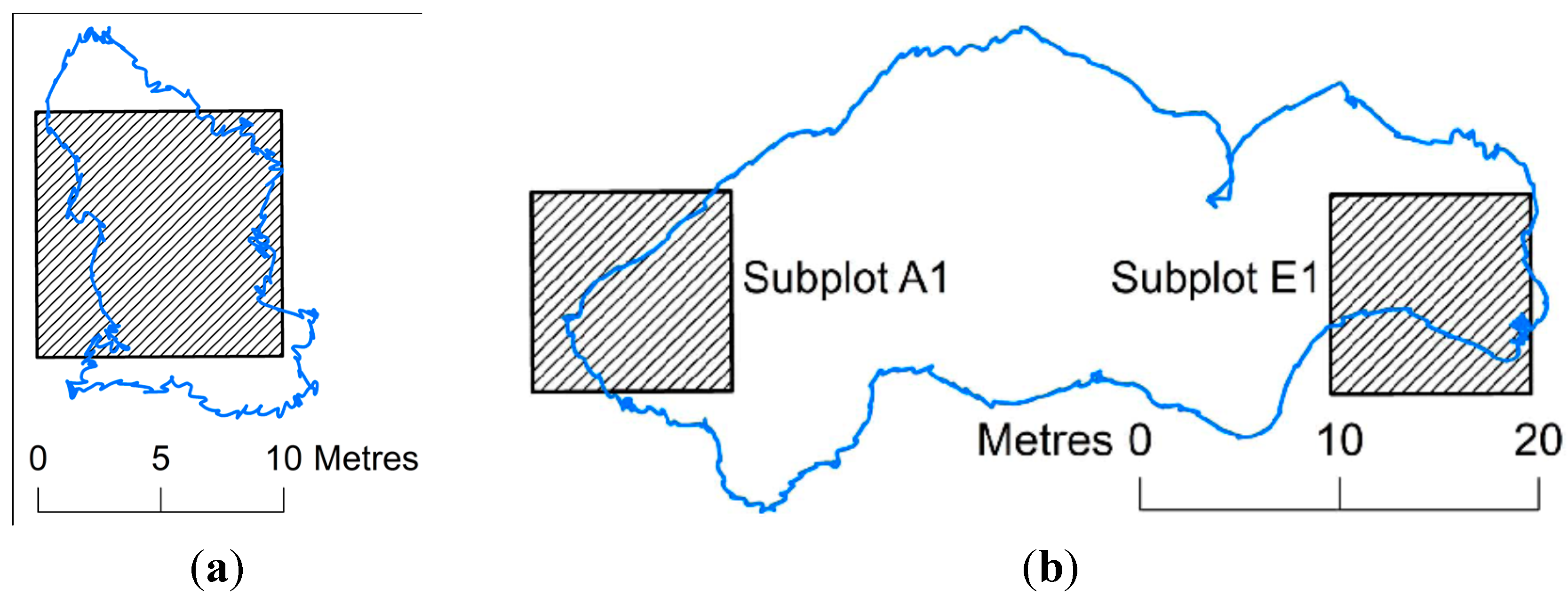
2.2.2. ZEB1 Data Collection
2.2.3. Field Survey Data Collection
2.3. Laser Scanner Measurement Processing
2.3.1. FARO Focus 3D
2.3.2. ZEB1
2.3.3. Transformation to Local Coordinate System
| Subplot | Number of Control Points | Mean Distance Error (mm) | Min Distance Error (mm) | Max Distance Error (mm) |
|---|---|---|---|---|
| A1 | 5 | 4 | 2 | 6 |
| E1 | 5 | 3 | 1 | 15 |
| E5 | 3 | 16 | 9 | 40 |
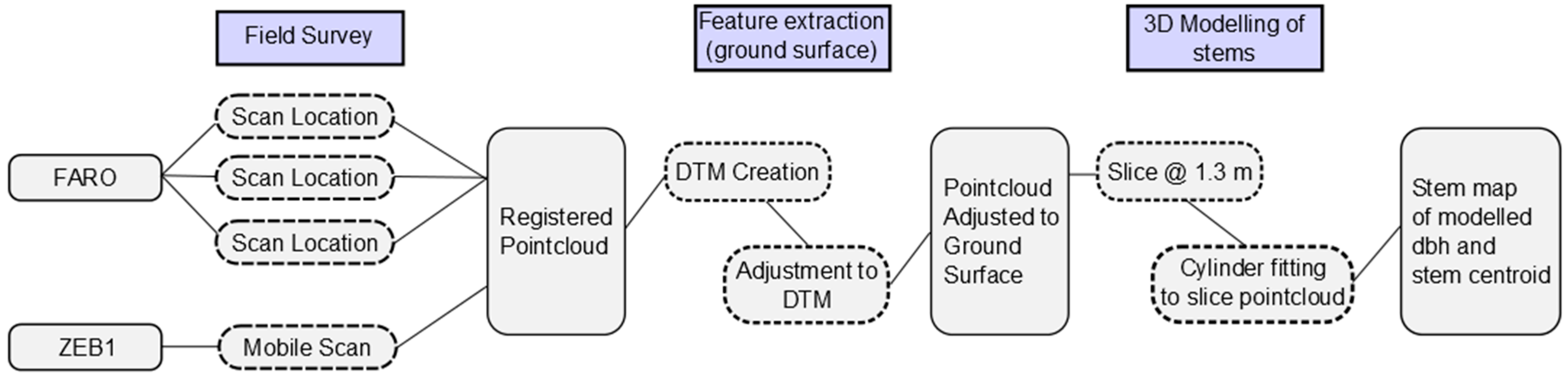
2.4. Feature Extraction

2.5. Analysis
3. Results
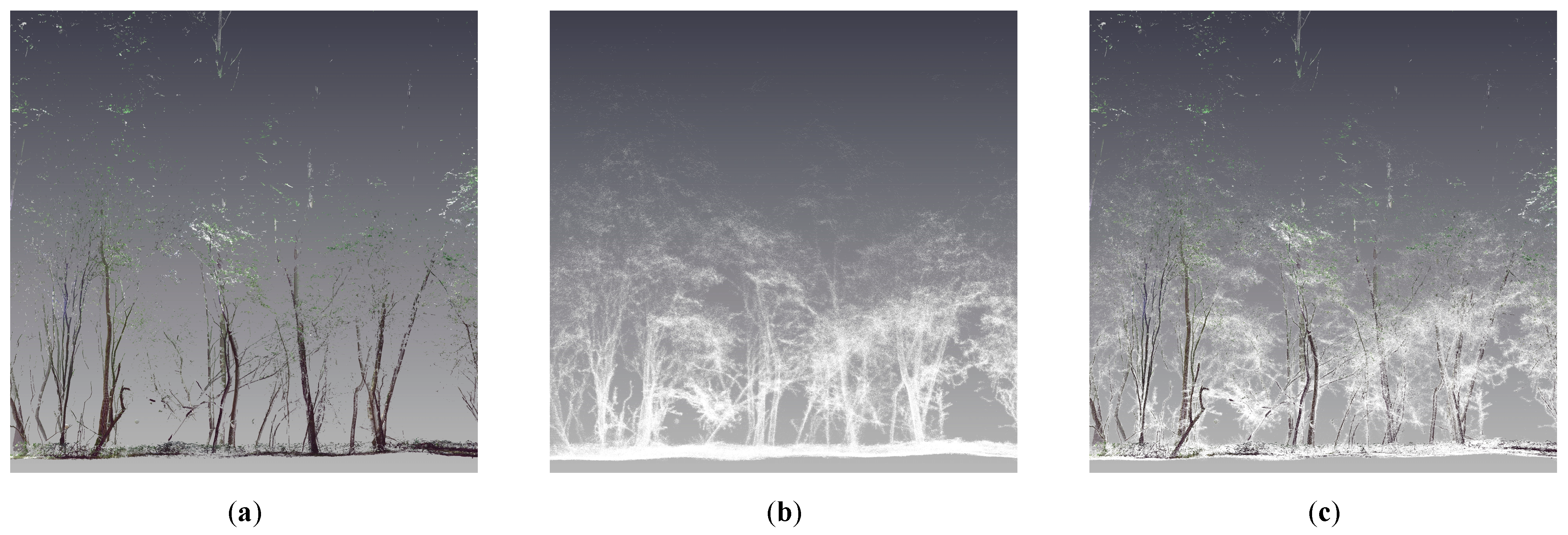
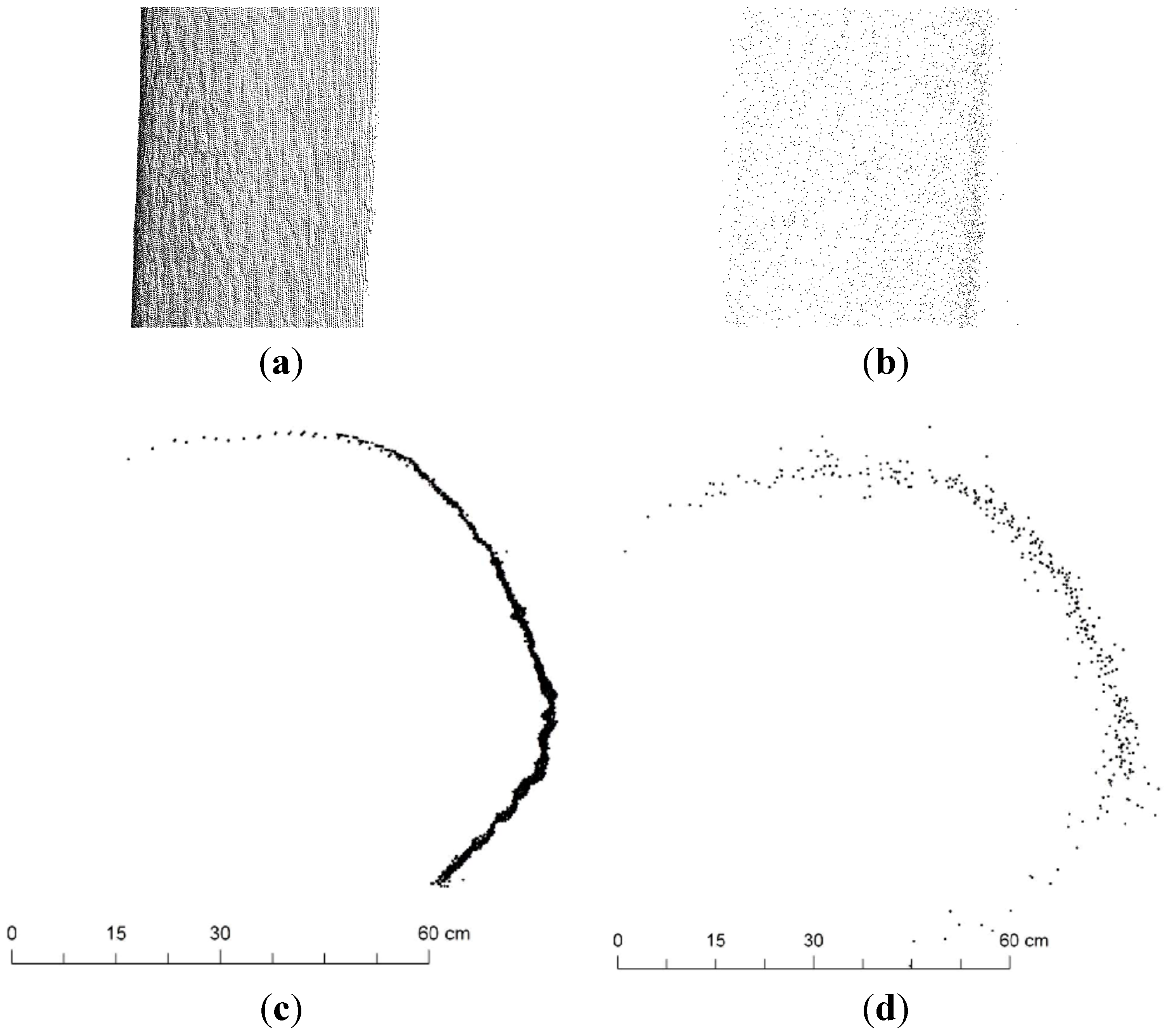
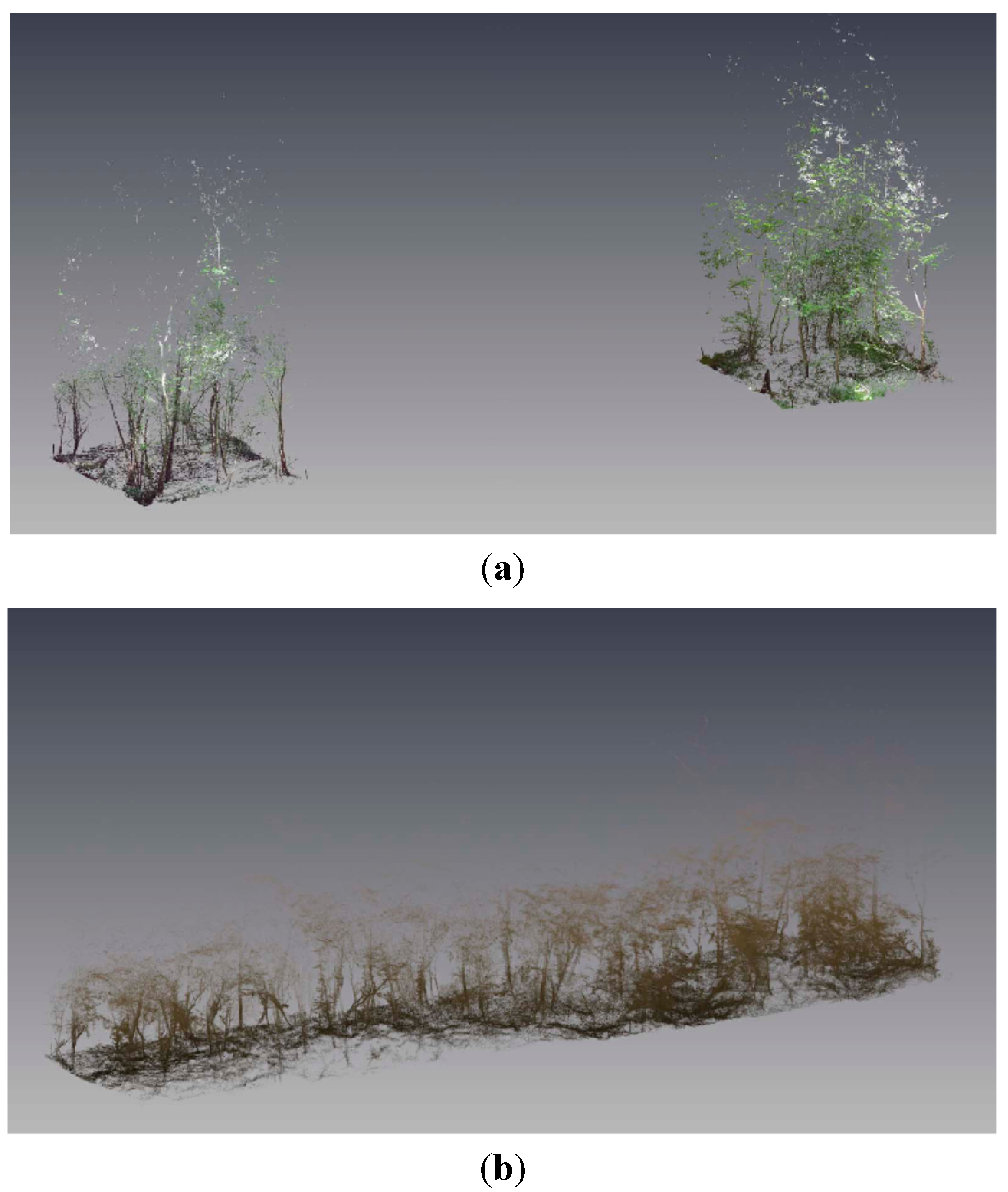
3.1. Direct HMLS to TLS Comparison
| Subplot | FARO Stems Modelled | ZEB1 Stems Modelled | Omission Difference |
|---|---|---|---|
| A1 | 23 | 21 | 9% |
| E1 | 13 | 12 | 8% |
| E5 | 18 | 16 | 11% |
| Type | Filter | RMSE (cm) | Relative RMSE (%) | Bias (cm) | Relative Bias (%) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Subplot | Subplot | Subplot | Subplot | ||||||||||||||
| All | A1 | E1 | E5 | All | A1 | E1 | E5 | All | A1 | E1 | E5 | All | A1 | E1 | E5 | ||
| Plan | None | 3.1 | 2.6 | 3.1 | 3.5 | - | - | - | - | 2.3 | 2.0 | 2.5 | 2.3 | - | - | - | - |
| Plan | Ø > 10 cm | 2.1 | 1.9 | 2.4 | 1.7 | - | - | - | - | 1.7 | 1.5 | 2.1 | 1.5 | - | - | - | - |
| Plan | Ø < 10 cm | 3.9 | 3.2 | 4.5 | 4.3 | - | - | - | - | 2.8 | 2.6 | 3.7 | 2.8 | - | - | - | - |
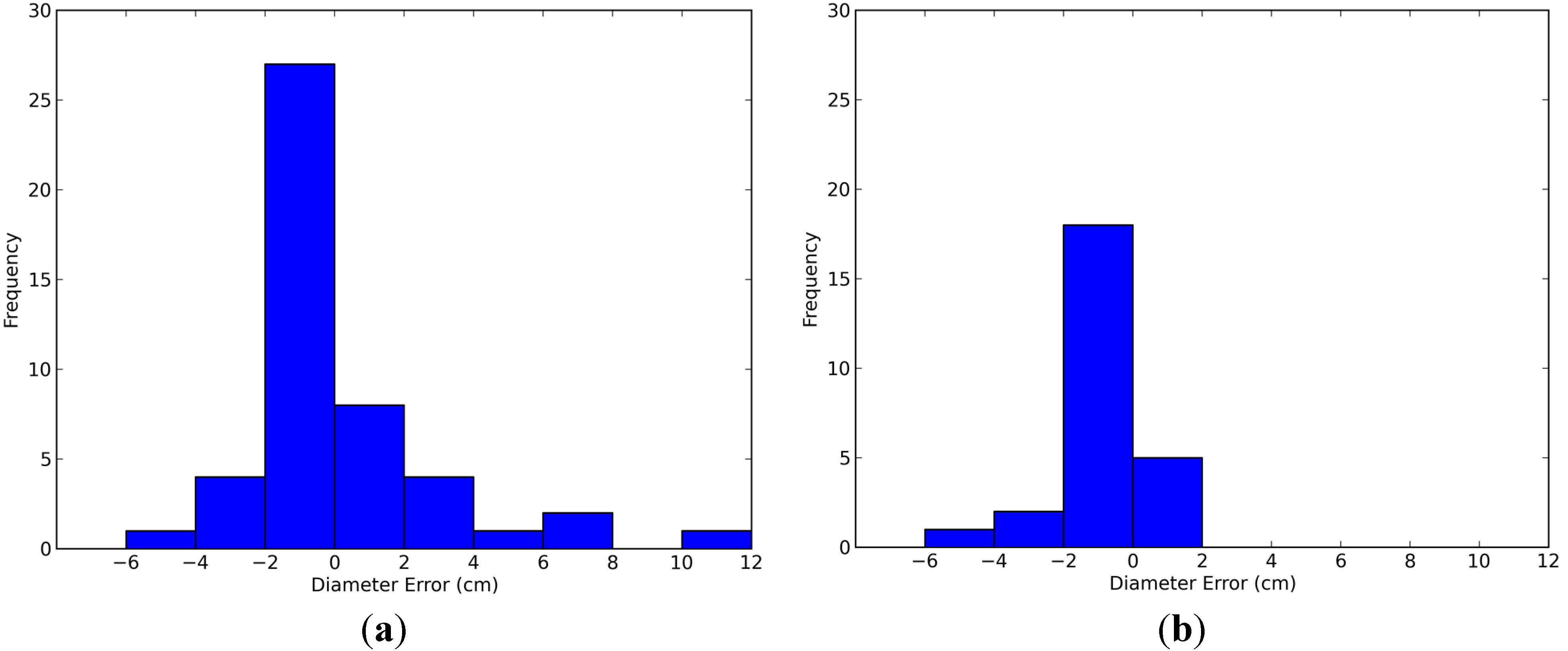
| DBH | None | 2.9 | 3.5 | 2.9 | 1.9 | 23 | 29 | 20 | 17 | 0.3 | 0.5 | 0.3 | 0.0 | 2.4 | 4.6 | 2.2 | −0.3 |
| DBH | Ø > 10 cm | 1.5 | 1.5 | 1.8 | 0.9 | 9 | 9 | 11 | 5 | 0.9 | −1.2 | −0.7 | −0.6 | −5.6 | −7.4 | −4.4 | −3.2 |
| DBH | Ø < 10 cm | 3.9 | 4.8 | 4.8 | 2.3 | 46 | 69 | 75 | 33 | 1.6 | 2.5 | 3.4 | 0.3 | 19.5 | 35.6 | 53.6 | 4.3 |


3.2. Comparison of Laser Scanning Survey Times against Field Survey Method
| Instrument | Personnel | Area (m2) | Time Taken (min) | Survey Coverage per Surveyor m2/min |
|---|---|---|---|---|
| FARO | 2 | 100 | 60 | 0.85 |
| ZEB1 | 1 | 100 | 5 | 20 |
| ZEB1 | 1 | 500 | 10 | 50 |
| Field survey | 4 | 2500 | 1440 | 0.43 |
4. Discussion
4.1. Can TLS Measurements Collected for Forest Inventory be Replicated Using HMLS?

4.2. Does the Use of HMLS Provide any Advantages in Practical Ease?

4.3. Are Any Novel Measurements Possible?
4.4. What Are the Remaining Challenges for the Application of HMLS in Forest Mensuration?
5. Conclusions
Supplementary Files
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hyyppä, J.; Holopainen, M.; Olsson, H. Laser scanning in forests. Remote Sens. 2012, 4, 2919–2922. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L. Moving toward consistent ALS monitoring of forest attributes across Canada. Photogramm. Eng. Remote Sens. 2013, 79, 159–173. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef] [PubMed]
- Hopkinson, C.; Lovell, J.; Chasmer, L.; Jupp, D.; Kljun, N.; van Gorsel, E. Integrating terrestrial and airborne lidar to calibrate a 3D canopy model of effective leaf area index. Remote Sens. Environ. 2013, 136, 301–314. [Google Scholar] [CrossRef]
- Hauglin, M.; Lien, V.; Næsset, E.; Gobakken, T. Geo-referencing forest field plots by co-registration of terrestrial and airborne laser scanning data. Int. J. Remote Sens. 2014, 35, 3135–3149. [Google Scholar] [CrossRef]
- Baraloto, C.; Couteron, P. Fine-scale microhabitat heterogeneity in a French Guianan forest. Biotropica 2010, 42, 420–428. [Google Scholar] [CrossRef]
- Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Newnham, G.J.; Culvenor, D.S. Measuring tree stem diameters using intensity profiles from ground-based scanning lidar from a fixed viewpoint. ISPRS J. Photogramm. Remote Sens. 2011, 66, 46–55. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Watt, P.J.; Donoghue, D.N.M. Measuring forest structure with terrestrial laser scanning. Int. J. Remote Sens. 2005, 26, 1437–1446. [Google Scholar] [CrossRef]
- Pueschel, P.; Newnham, G.; Rock, G.; Udelhoven, T.; Werner, W.; Hill, J. The influence of scan mode and circle fitting on tree stem detection, stem diameter and volume extraction from terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 77, 44–56. [Google Scholar] [CrossRef]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; et al. Tree mapping using airborne, terrestrial and mobile laser scanning—A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Yang, B.; Fang, L.; Li, J. Semi-automated extraction and delineation of 3D roads of street scene from mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 79, 80–93. [Google Scholar] [CrossRef]
- Arnó, J.; Vallès, J.M.; Llorens, J.; Sanz, R.; Masip, J.; Palacín, J.; Rosell-Polo, J.R. Leaf area index estimation in vineyards using a ground-based LiDAR scanner. Precis. Agric. 2013, 14, 290–306. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Hyyppa, J.; Kukko, A.; Kaartinen, H. The use of a mobile laser scanning system for mapping large forest plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Wang, Y. Possibilities of a personal laser scanning system for forest mapping and ecosystem services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef] [PubMed]
- D Laser Scanner FARO Focus3D. Available online: http://www.faro.com/en-gb/products/3d-surveying (accessed on 20 August 2014).
- Bienert, A.; Scheller, S. Application of terrestrial laser scanners for the determination of forest inventory parameters. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36. Part 5. [Google Scholar]
- Fritz, A.; Kattenborn, T.; Koch, B. UAV-based photogrammetric point clouds-tree stem mapping in open stands in comparison to terrestrial laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. XL 2013, 1, W2. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Thomson, C.; Apostolopoulos, G.; Backes, D.; Boehm, J. Mobile laser scanning for indoor modelling. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II–5/W2, 289–293. [Google Scholar] [CrossRef]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a spring-mounted 3-D range sensor with application to mobile mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Besl, P.; McKay, N. Method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Becerik-Gerber, B.; Jazizadeh, F.; Kavulya, G.; Calis, G. Assessment of target types and layouts in 3D laser scanning for registration accuracy. Autom. Constr. 2011, 20, 649–658. [Google Scholar] [CrossRef]
- Eichhorn, M.P. Spatial organisation of a bimodal forest stand. J. For. Res. 2010, 15, 391–397. [Google Scholar] [CrossRef]
- Pueschel, P. The influence of scanner parameters on the extraction of tree metrics from FARO Photon 120 terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 78, 58–68. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Vierling, L.A.; Magney, T.S. A lightweight, low cost autonomously operating terrestrial laser scanner for quantifying and monitoring ecosystem structural dynamics. Agric. For. Meteorol. 2013, 180, 86–96. [Google Scholar] [CrossRef]
- Freeman, E.A.; Ford, E.D. Effects of data quality on analysis of ecological patterns using the K̂ (d) statistical function. Ecology 2002, 83, 35–46. [Google Scholar]
- Alba, M.; Scaioni, M. Comparison of techniques for terrestrial laser scanning data georeferencing applied to 3-D modelling of cultural heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, W47. [Google Scholar]
- Desclée, B.; Bogaert, P.; Defourny, P. Forest change detection by statistical object-based method. Remote Sens. Environ. 2006, 102, 1–11. [Google Scholar] [CrossRef]
- Nascimento, H.E.M.; Laurance, W.F. Total aboveground biomass in central Amazonian rainforests: A landscape-scale study. For. Ecol. Manag. 2002, 168, 311–321. [Google Scholar] [CrossRef]
- Araújo, T.M. Comparison of formulae for biomass content determination in a tropical rain forest site in the state of Pará, Brazil. For. Ecol. Manag. 1999, 117, 43–52. [Google Scholar] [CrossRef]
- Quinton, J.N.; James, M.R. Ultra-rapid topographic surveying for complex environments: The hand-held mobile laser scanner (HMLS). Earth Surf. Process. Landf. 2013, 39, 138–142. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sens. 2015, 7, 1095-1111. https://doi.org/10.3390/rs70101095
Ryding J, Williams E, Smith MJ, Eichhorn MP. Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sensing. 2015; 7(1):1095-1111. https://doi.org/10.3390/rs70101095
Chicago/Turabian StyleRyding, Joseph, Emily Williams, Martin J. Smith, and Markus P. Eichhorn. 2015. "Assessing Handheld Mobile Laser Scanners for Forest Surveys" Remote Sensing 7, no. 1: 1095-1111. https://doi.org/10.3390/rs70101095
APA StyleRyding, J., Williams, E., Smith, M. J., & Eichhorn, M. P. (2015). Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sensing, 7(1), 1095-1111. https://doi.org/10.3390/rs70101095