
An Investigation of a Novel Cross-Calibration Method of FY-3C/VIRR against NPP/VIIRS in the Dunhuang Test Site

Abstract
:
1. Introduction
2. Methodology
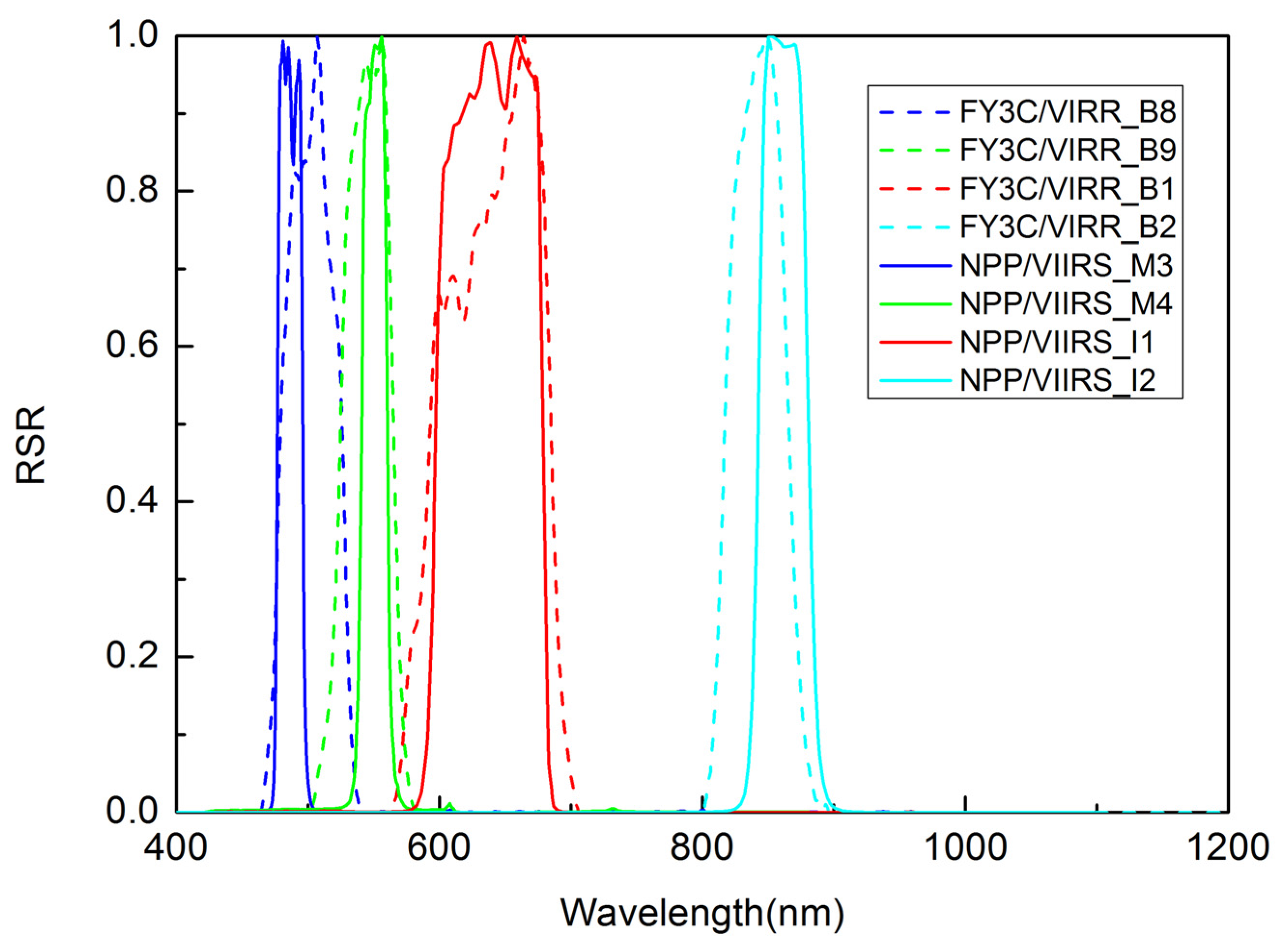
2.1. Dataset Description

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Centre Wavelength (μm) | Spectral Range (μm) | Spatial Resolution at Nadir (m) | |
|---|---|---|---|---|
| FY-3C/VIRR | 1 | 0.630 | 0.58–0.68 | 1100 |
| 2 | 0.865 | 0.84–0.89 | 1100 | |
| 8 | 0.505 | 0.48–0.53 | 1100 | |
| 9 | 0.555 | 0.53–0.58 | 1100 | |
| NPP/VIIRS | I1 | 0.640 | 0.60–0.68 | 375 |
| I2 | 0.865 | 0.85–0.88 | 375 | |
| M3 | 0.488 | 0.478–0.498 | 750 | |
| M4 | 0.555 | 0.545–0.565 | 750 |

| Date | VIIRS | VIRR | ||||||
|---|---|---|---|---|---|---|---|---|
| SZA | SAA | VZA | VAA | SZA | SAA | VZA | VAA | |
| 8 January 2014 | 62.68 | −173.55 | 37.31 | 74.33 | 64.50 | 162.11 | 21.07 | −77.11 |
| 13 January 2014 | 62.03 | −172.32 | 29.87 | 75.32 | 63.48 | 163.14 | 30.24 | −75.71 |
| 24 January 2014 | 59.56 | −174.62 | 37.35 | 74.32 | 61.78 | 160.39 | 23.50 | −76.73 |
| 29 January 2014 | 58.40 | −173.02 | 29.88 | 75.31 | 60.19 | 161.54 | 32.36 | −75.38 |
| 13 March 2014 | 43.43 | −171.67 | 37.61 | 74.22 | 45.60 | 157.12 | 29.94 | −75.79 |
| 14 March 2014 | 42.73 | −178.36 | 54.18 | 71.07 | 46.77 | 150.94 | 2.28 | −87.08 |
| 24 March 2014 | 39.05 | −171.91 | 43.72 | 73.23 | 41.62 | 154.53 | 22.92 | −76.86 |
| 6 May 2014 | 24.28 | −165.10 | 48.87 | 72.26 | 26.86 | 147.57 | 18.94 | −77.53 |
| 24 July 2014 | 21.72 | −156.56 | 29.69 | 75.37 | 22.27 | 152.56 | 47.02 | −72.89 |
| 11 September 2014 | 36.16 | −168.11 | 49.32 | 72.22 | 37.19 | 159.92 | 30.21 | −75.77 |
| 16 September 2014 | 38.40 | −165.41 | 43.84 | 73.27 | 38.56 | 163.97 | 37.89 | −74.55 |

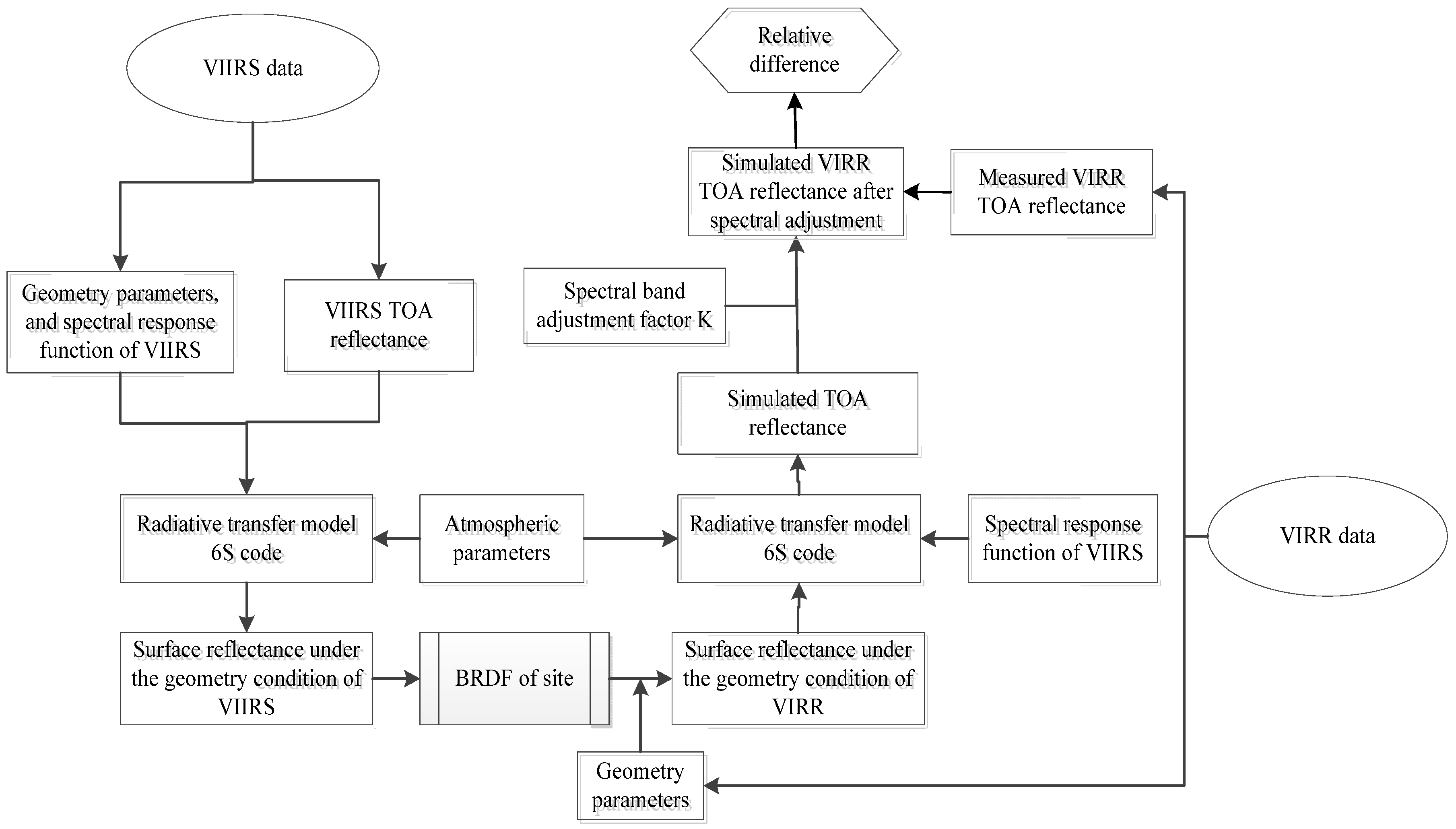
2.2. Cross-Calibration Approach


| Date | WVC at VIIRS Scenes Acquisition Time (g·cm−2) | WVC at VIRR Scenes Acquisition Time (g·cm−2) | Ozone (atm-cm) | Visibility (km) |
|---|---|---|---|---|
| 8 January 2014 | 0.260 | 0.231 | 0.334 | 40.0 |
| 13 January 2014 | 0.269 | 0.171 | 0.335 | |
| 24 January 2014 | 0.369 | 0.464 | 0.332 | |
| 29 January 2014 | 0.461 | 0.526 | 0.327 | |
| 13 March 2014 | 0.298 | 0.272 | 0.341 | |
| 14 March 2014 | 0.635 | 0.619 | 0.341 | |
| 24 March 2014 | 0.551 | 0.524 | 0.347 | |
| 6 May 2014 | 0.751 | 0.754 | 0.280 | |
| 24 July 2014 | 1.234 | 1.198 | 0.280 | |
| 11 September 2014 | 0.848 | 0.844 | 0.297 | |
| 16 September 2014 | 0.397 | 0.318 | 0.297 |

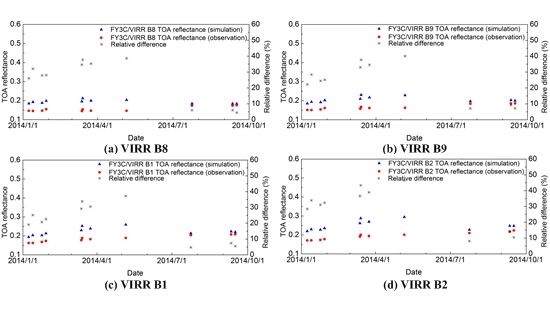
3. Results
| Date | Mean Value | STD Value | ||||||
|---|---|---|---|---|---|---|---|---|
| B8 | B9 | B1 | B2 | B8 | B9 | B1 | B2 | |
| 8 January 2014 | 140.95 | 145.17 | 83.62 | 87.08 | 1.92 | 2.51 | 1.89 | 2.57 |
| 13 January 2014 | 144.78 | 149.34 | 86.13 | 90.15 | 2.06 | 2.75 | 2.02 | 2.72 |
| 24 January 2014 | 153.59 | 160.44 | 92.99 | 95.53 | 2.25 | 2.95 | 2.21 | 2.87 |
| 29 January 2014 | 169.06 | 175.29 | 99.84 | 101.87 | 2.82 | 3.07 | 2.15 | 2.60 |
| 13 March 2014 | 215.26 | 232.47 | 136.25 | 145.70 | 3.59 | 4.68 | 3.40 | 4.66 |
| 14 March 2014 | 222.88 | 240.54 | 140.89 | 149.22 | 3.42 | 4.51 | 3.39 | 4.53 |
| 24 March 2014 | 230.96 | 251.25 | 147.83 | 156.00 | 3.25 | 4.14 | 3.08 | 4.06 |
| 6 May 2014 | 265.87 | 293.62 | 175.70 | 185.71 | 4.79 | 6.24 | 5.05 | 7.20 |
| 24 July 2014 | 249.63 | 269.75 | 156.51 | 155.94 | 3.72 | 4.65 | 3.50 | 4.88 |
| 11 September 2014 | 219.52 | 239.85 | 140.87 | 142.15 | 5.22 | 6.96 | 4.85 | 6.25 |
| 16 September 2014 | 218.79 | 237.21 | 139.20 | 144.28 | 4.36 | 5.65 | 4.00 | 5.35 |





| VIRR Band | Pre-Launch | Post-Launch (on June 2014) | Relative Difference |
|---|---|---|---|
| 1 | 0.10118 | 0.12549 | 24.03% |
| 2 | 0.10126 | 0.1297 | 28.09% |
| 8 | 0.05061 | 0.06502 | 28.47% |
| 9 | 0.05063 | 0.06455 | 27.49% |
4. Uncertainty Analysis
- The uncertainty caused by the VIIRS calibration ( (band number i = 8, 9, 1, and 2)): the uncertainty of the VIIRS calibration is approximately 2% (see the second row in Table 6).
- The uncertainty that is caused by the 6S model ( (band number i = 8, 9, 1, and 2)): according to the error transfer theory, the error of the 6S model (), which is estimated to be approximately 2%, caused by this model error () is approximately 2.83% (see the third row in Table 6).
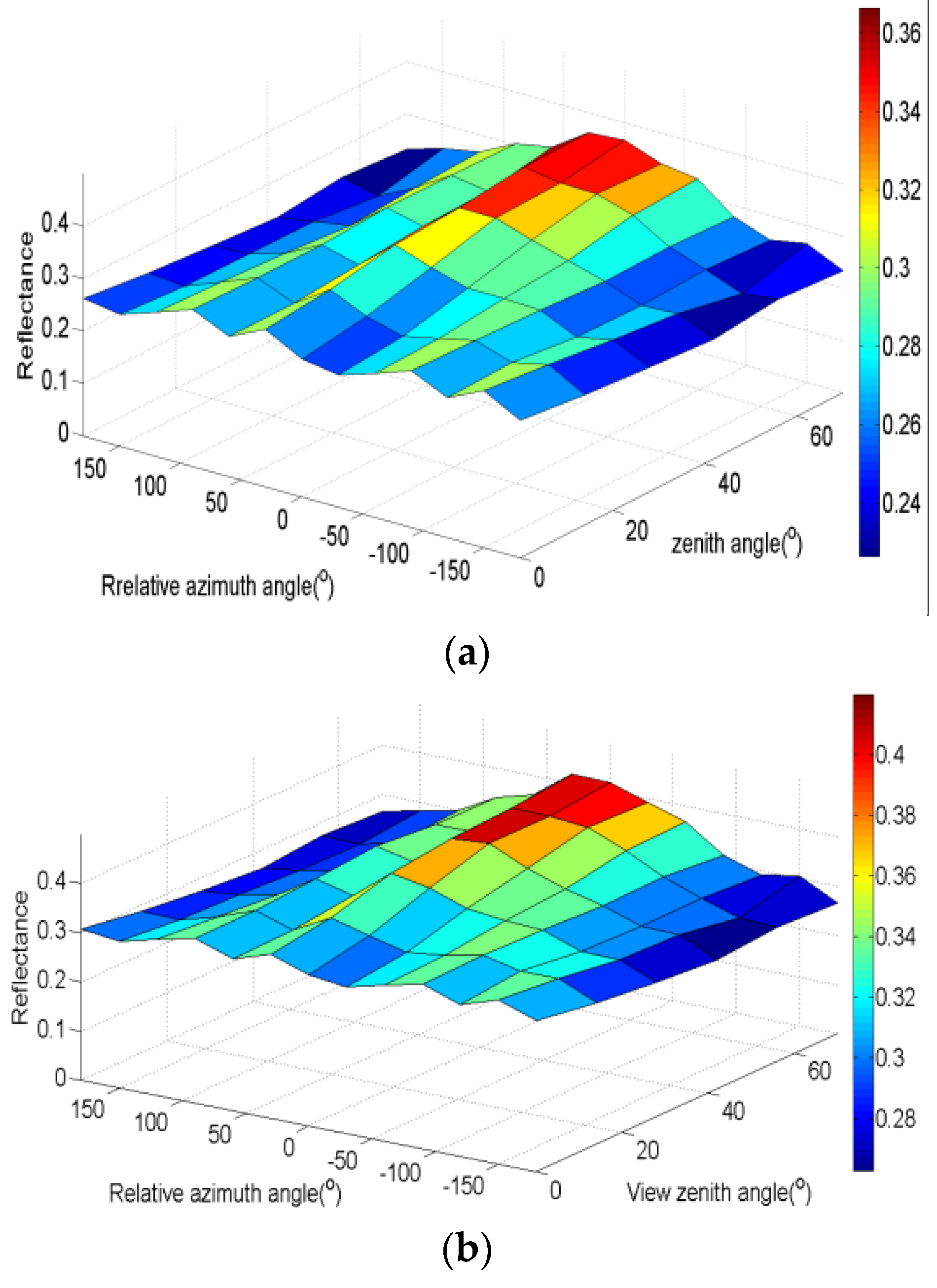
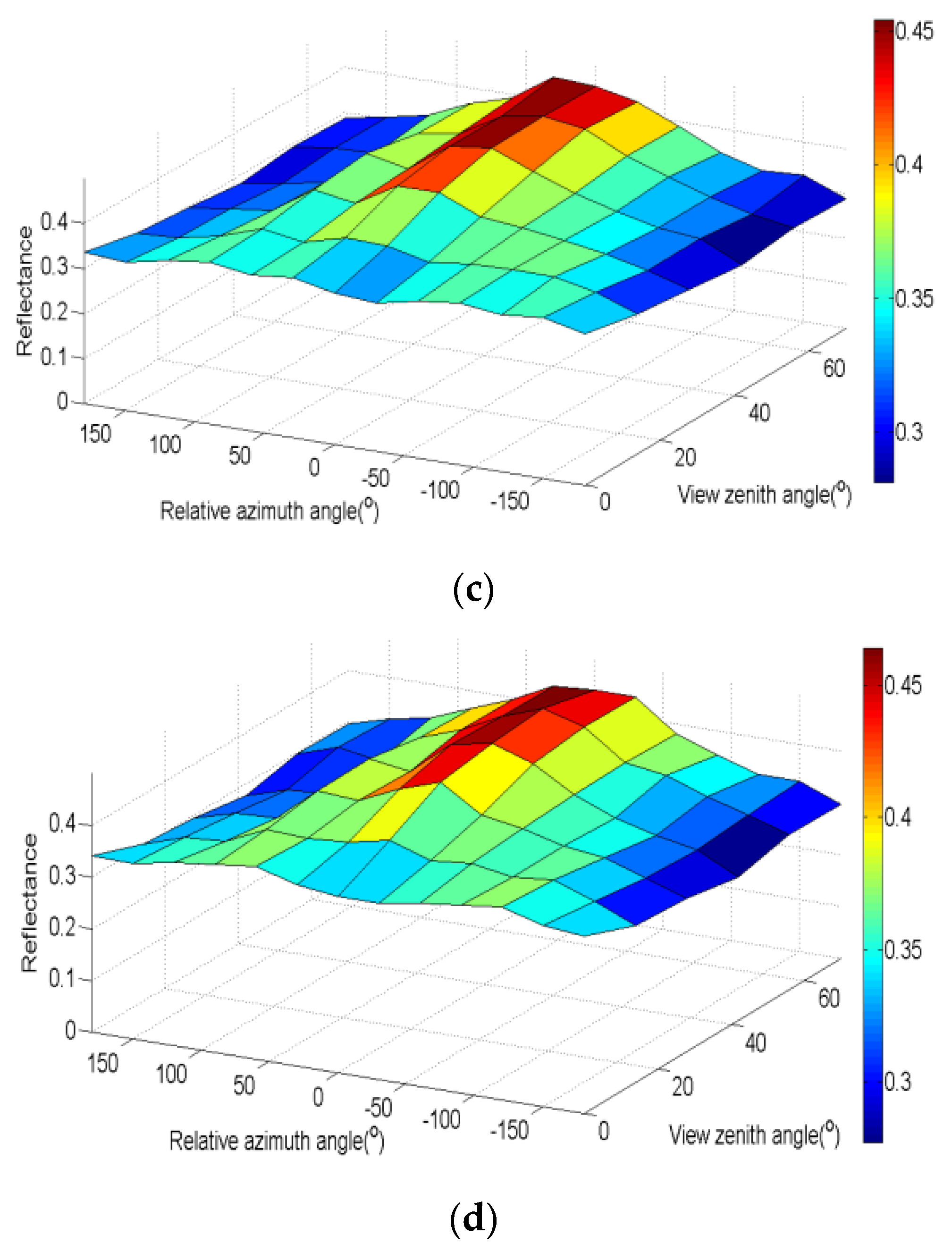
- The uncertainty caused by the BRDF effect ((band number i = 8, 9, 1, and 2)): the uncertainty of the fitted BRDF model proposed by Roujean is approximately 5%, resulting in an uncertainty within 4.5% of the simulated VIRR TOA radiance (see the fourth row in Table 6).
- The uncertainty that is caused by the atmospheric parameters
- In this study, the aerosol type is assumed as the continental aerosol model, which would create an error in the TOA reflectance simulation of VIRR because the Dunhuang test site has a mixed aerosol type of the continental and desert models. To analyze the effect of aerosol type on the cross-calibration ( (band number i = 8, 9, 1, and 2)), spectral adjustment factors and a new group of VIRR TOA reflectance for a given band i is generated when the desert aerosol model is used, and the relative differences are also computed (see the fifth row in Table 6). Similarly, the visibility is changed by ±10 km to analyze the uncertainty caused by aerosol type ( (band number i = 8, 9, 1, and 2), see the sixth row in Table 6). The results demonstrate that the uncertainty resulting from the aerosol type and the visibility are all within 1%.
- The WVC and ozone contents are also important parameters in this cross-calibration approach. To investigate their effects, similar to the analysis method of visibility, it could be found that the 20% uncertainty in WVC and 10% uncertainty in ozone content would cause an uncertainty within 0.5% ( (band number i = 8, 9, 1, and 2)) and 0.2% ( (band number i = 8, 9, 1, and 2)), respectively, to the cross-calibration (see the seventh and eighth rows in Table 6).
- Image co-registration error ( (band number i = 8, 9, 1, and 2)): the relative location offset of the cross-calibration test site in two images is inevitable, thereby affecting the accuracy of the cross-calibration. In this study, a sliding window method is used [17] to estimate that the image co-registration error would cause an uncertainty of approximately 0.3%–0.5% (see the ninth row in Table 6).
| Source | FY/VIRR B8 | FY/VIRR B9 | FY/VIRR B1 | FY/VIRR B2 |
|---|---|---|---|---|
| VIIRS calibration accuracy | 2.00% | 2.00% | 2.00% | 2.00% |
| 6S model | 2.83% | 2.83% | 2.83% | 2.83% |
| BRDF | 4.13% | 4.33% | 4.56% | 4.42% |
| Aerosol type | 0.51% | 0.95% | 0.97% | 1.07% |
| Visibility | 0.65% | 0.56% | 0.50% | 0.32% |
| WVC | 0.01% | 0.01% | 0.02% | 0.41% |
| Ozone content | 0.16% | 0.18% | 0.16% | 0.01% |
| Image co-registration | 0.31% | 0.36% | 0.44% | 0.57% |
| Total uncertainty | 5.47% | 5.67% | 5.85% | 5.77% |
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Teillet, P.M.; Fedosejevs, G.; Thome, K.J.; Barker, J.L. Impacts of spectral band difference effects on radiometric cross-calibration between satellite sensors in the solar-reflective spectral domain. Remote Sens. Environ. 2007, 110, 393–409. [Google Scholar] [CrossRef]
- Kuusk, A.; Kuusk, J.; Lang, M.; Lükk, T. Vicarious calibration of the PROBA/CHRIS imaging spectrometer. Photogramm. J. Finl. 2010, 22, 46–59. [Google Scholar]
- Gao, C.X.; Jiang, X.G.; Li, X.B.; Li, X.H. The cross-calibration of CBERS-02B/CCD visible-near infrared channels with Terra/MODIS channels. Int. J. Remote Sens. 2013, 34, 3688–3698. [Google Scholar] [CrossRef]
- Ham, S.H.; Sohn, B.J. Assessment of the calibration performance of satellite visible channels using cloud targets: Application to Meteosat-8/9 and MTSAT-1R. Atmos. Chem. Phys. 2010, 10, 11131–11149. [Google Scholar] [CrossRef]
- Teillet, P.M.; Barsi, J.A.; Chander, G.; Thome, K.J. Prime candidate earth targets for the post-launch radiometric calibration of space-based optical imaging instruments, optical engineering applications. Int. Soc. Opt. Photonics 2007. [Google Scholar] [CrossRef]
- Chander, G.; Hewison, T.J.; Fox, N.; Wu, X.; Xiong, X.; Blackwell, W.J. Overview of intercalibration of satellite instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Yu, F.F.; Wu, X.Q.; Goldberg, M. Recent operational status of GSICS GEO-LEO and GEO-GEO inter-calibrations at NOAA/NESDIS. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 989–992.
- Xu, N.; Chen, L.; Wu, R.H.; Hu, X.Q.; Sun, L.; Zhang, P. In-flight intercalibration of FY-3C visible channels with AQUA MODIS. Proc. SPIE 2014. [Google Scholar] [CrossRef]
- VIIRS SDR Science Team. Visible Infrared Imaging Radiometer Suite (VIIRS) Sensor Data Record (SDR) Error Budget. 19 December 2013. Available online: http://www.star.nesdis.noaa.gov/smcd/spb/nsun/snpp/VIIRS/VIIRS_SDR_Error_Budget-2013.pdf (accessed on 16 October 2015). [Google Scholar]
- USGS. Remote Sensing Technologies. Available online: http://calval.cr.usgs.gov/rst-resources/sites_catalog/radiometric-sites/dunhuang (accessed on 7 October 2015).
- Cao, C.; Shao, X.; Uprety, S. Detecting light outages after severe storms using the S-NPP/VIIRS day/night band radiances. IEEE Trans. Geosci. Remote Sens. Lett. 2013, 10, 1582–1586. [Google Scholar] [CrossRef]
- Cao, C.; de Luccia, F.J.; Xiong, X.X.; Wolfe, R.; Weng, F. Early on-orbit performance of the visible infrared imaging radiometer suite onboard the suomi national polar-orbiting Partnership (S-NPP) satellite. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1142–1156. [Google Scholar] [CrossRef]
- Lacherade, S.; Fougnie, B.; Henry, P.; Gamet, P. Cross calibration over desert sites: Description, methodology, and operational implementation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1098–1113. [Google Scholar] [CrossRef]
- Roujean, J.L.; Leroy, M.; Deschamps, P.Y. A bi-directional reflectance model of the Earth’s surface for the correction of remote sensing data. J. Geophys. Res. 1992, 97, 20455–20468. [Google Scholar] [CrossRef]
- Neckel, H.; Labs, D. The solar radiation between 3300 and 12500. Sol. Phys. 1984, 90, 205–258. [Google Scholar] [CrossRef]
- Chander, G.; Mishra, N.; Helder, D.L.; Aaron, D.; Choi, T.; Angal, A.; Xiong, X. Use of EO-1 Hyperion data to calculate spectral band adjustment factors (SBAF) between the L7 ETM+ and Terra MODIS sensors. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 1667–1670.
- Wang, Z.; Xiao, P.F.; Gu, X.F.; Feng, X.Z.; Li, X.Y.; Gao, H.L.; Li, H.; Lin, J.T.; Zhang, X.L. Uncertainty analysis of cross-calibration for HJ-1 CCD camera. Sci. China 2013, 56, 713–723. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, C.; Zhao, Y.; Li, C.; Ma, L.; Wang, N.; Qian, Y.; Ren, L. An Investigation of a Novel Cross-Calibration Method of FY-3C/VIRR against NPP/VIIRS in the Dunhuang Test Site. Remote Sens. 2016, 8, 77. https://doi.org/10.3390/rs8010077
Gao C, Zhao Y, Li C, Ma L, Wang N, Qian Y, Ren L. An Investigation of a Novel Cross-Calibration Method of FY-3C/VIRR against NPP/VIIRS in the Dunhuang Test Site. Remote Sensing. 2016; 8(1):77. https://doi.org/10.3390/rs8010077
Chicago/Turabian StyleGao, Caixia, Yongguang Zhao, Chuanrong Li, Lingling Ma, Ning Wang, Yonggang Qian, and Lu Ren. 2016. "An Investigation of a Novel Cross-Calibration Method of FY-3C/VIRR against NPP/VIIRS in the Dunhuang Test Site" Remote Sensing 8, no. 1: 77. https://doi.org/10.3390/rs8010077
APA StyleGao, C., Zhao, Y., Li, C., Ma, L., Wang, N., Qian, Y., & Ren, L. (2016). An Investigation of a Novel Cross-Calibration Method of FY-3C/VIRR against NPP/VIIRS in the Dunhuang Test Site. Remote Sensing, 8(1), 77. https://doi.org/10.3390/rs8010077