Intuitively, what is minimally required is just an unfolding procedure that reorganizes the footprints according to their geolocation (rather than in the order they were acquired by the instrument and reported in the RDR/SDR swath data files). Note that the problem of bow tie distortions in MODIS has long been recognized (e.g., [
12,
13,
14,
15,
16]). The proposed solution has been remapping, whereas our objective here is to preserve the original swath projection for L2 ACSPO SST product, deferring the mapping to L3 and higher processing levels.
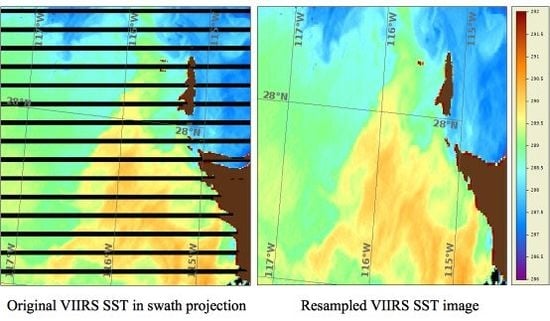
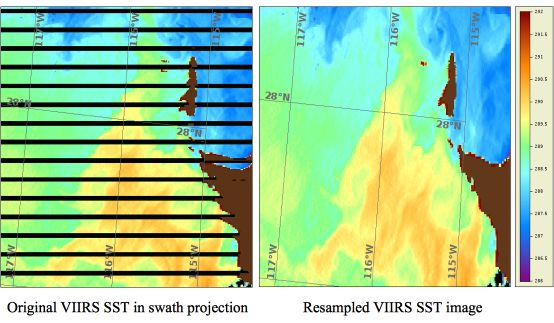
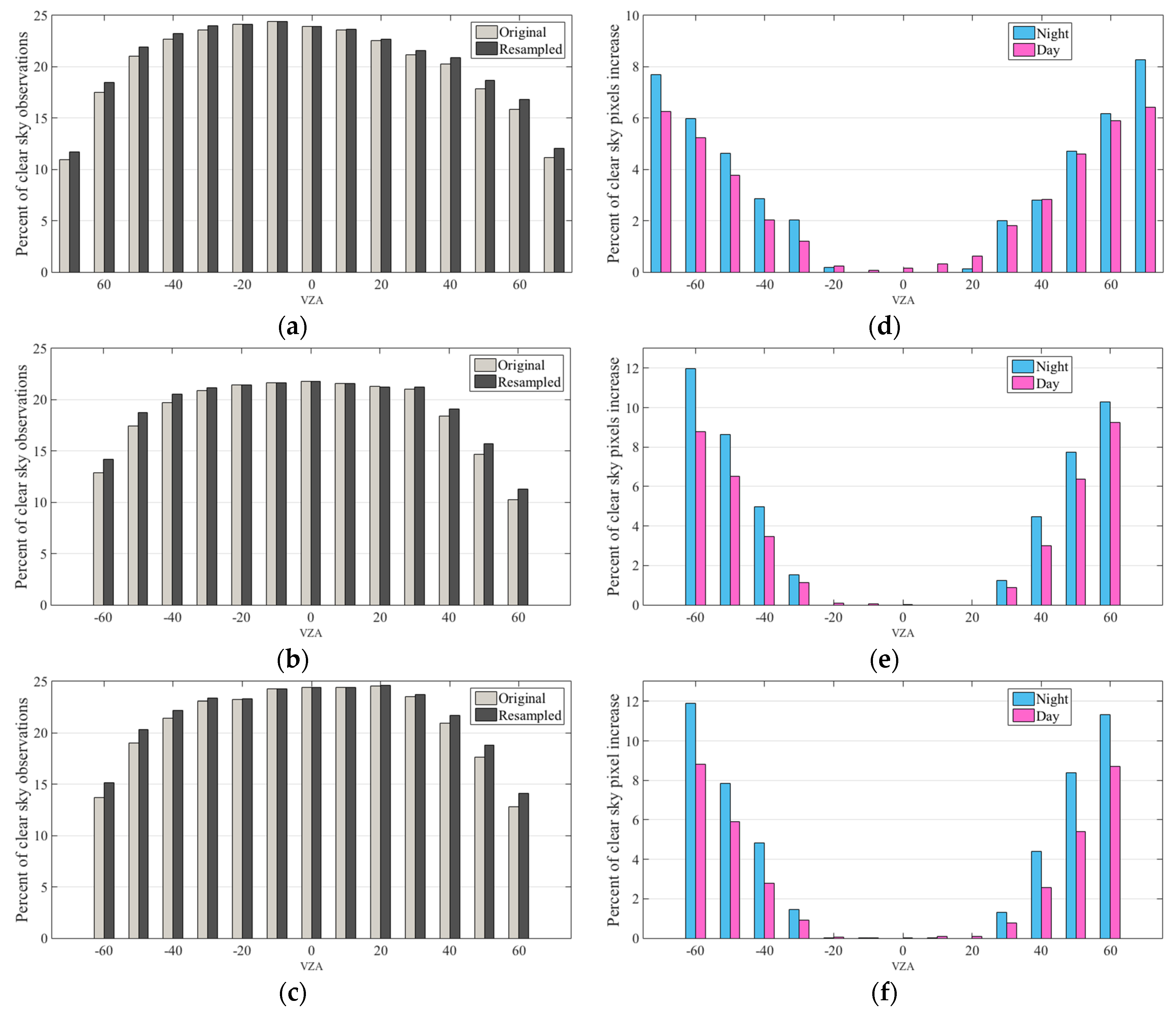
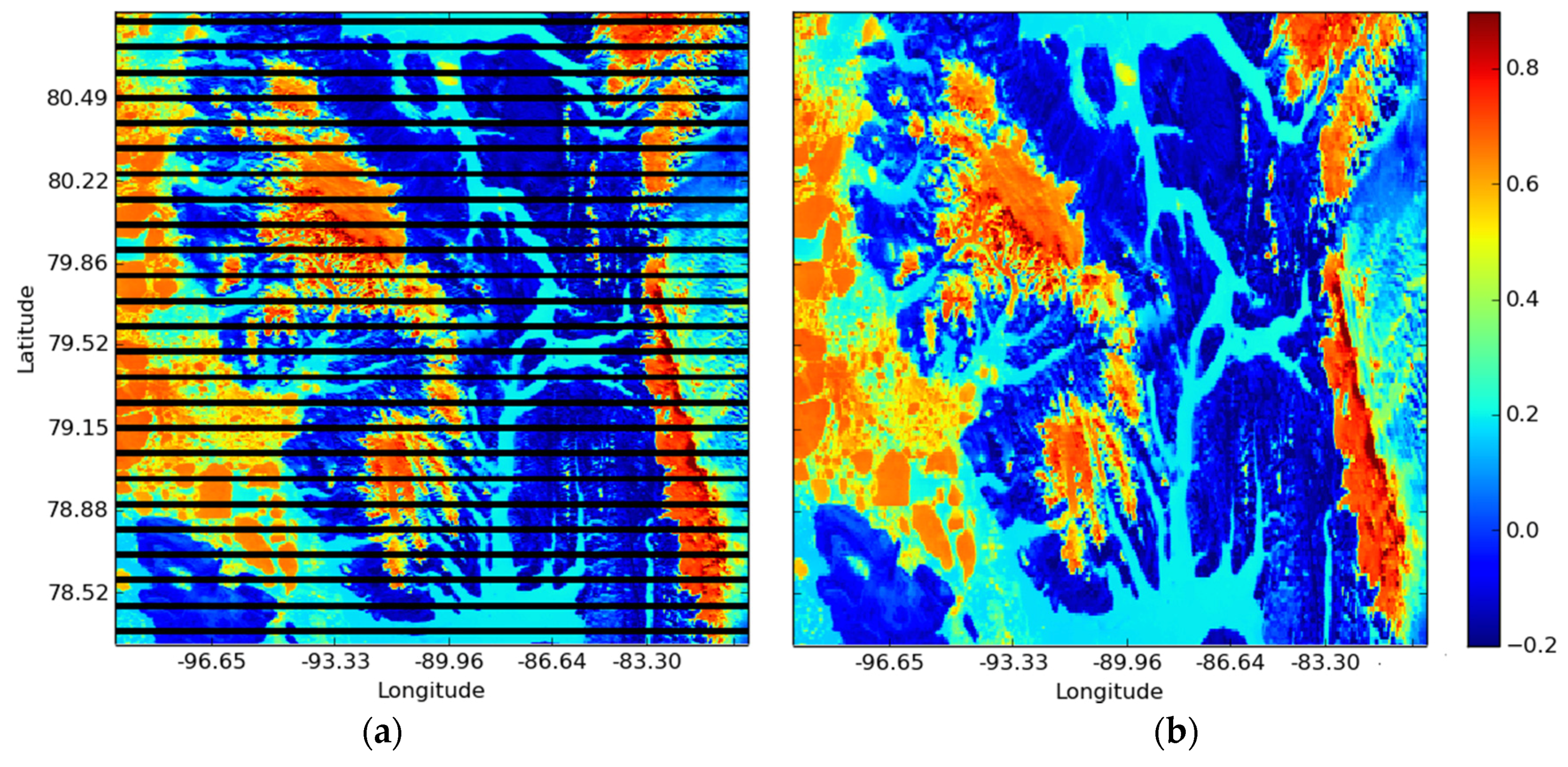
The impact of the proposed resampling approach on SST imagery can be quickly previewed from
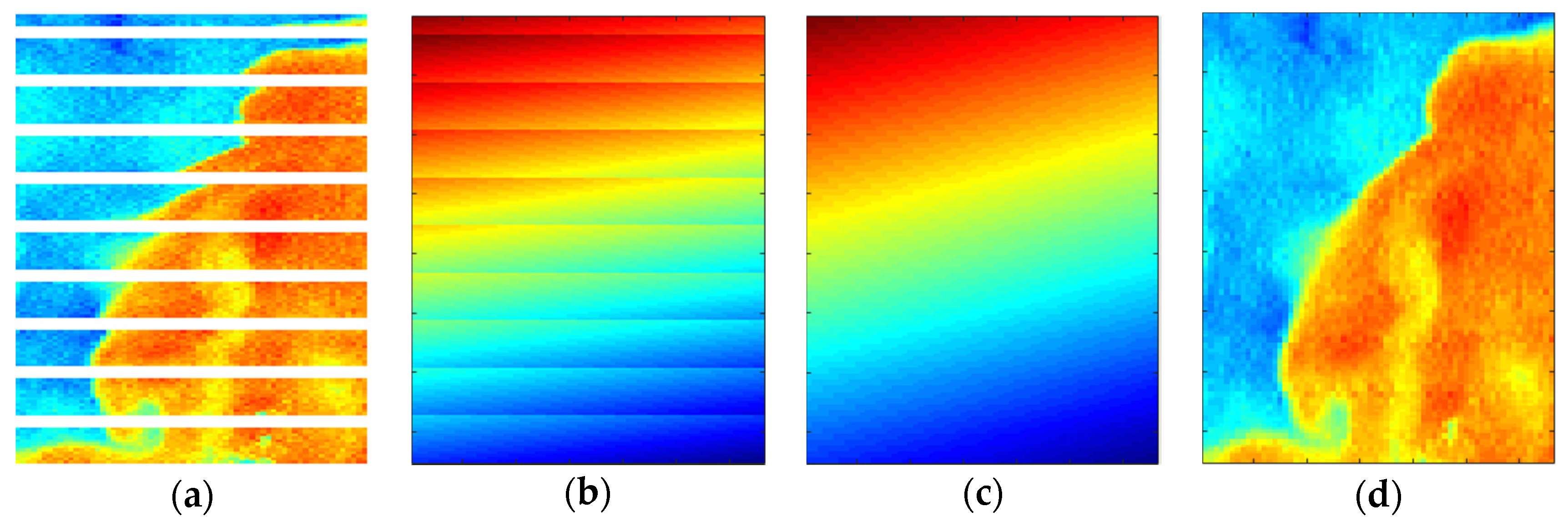
Figure 4. A small crop from a typical SST image near the end of the swath and the corresponding image of the latitude (as it appears in the SDR geolocation file) are shown in
Figure 4a,b. The same latitude values, but re-ordered according to our unfolding scheme (described in
Section 3.1) are shown in
Figure 4c and the corresponding re-sampled SSTs in
Figure 4d. The bow-ties, obviously present in the original L2 SST product (
Figure 4a), are “unfolded” along with the corresponding geolocation. Re-ordering according to predefined order is computationally cheap, meets the requirements A
II and A
III and almost meets the requirement A
I (see
Section 3.2 for details). The last component of the resampling procedure is the adjustment of the longitude values in the bow-tie regions (described in the
Section 3.3), which satisfies the A
I and fulfills all three requirements, A
I–A
III.
Figure 4.
(a) Original VIIRS SST with bow-tie distortions and deletions (note the jumps and repeats along the SST thermal fronts, and that onboard deleted pixels are shown in white); (b) original latitudes; (c) unfolded latitudes; (d) corresponding resampled SSTs.
3.1. Unfolding
Unfolding is basically the re-ordering according to some pattern related to the geometry of the instrument’s swath projection and the footprint locations of the scan on the Earth surface. This pattern is specific to the particular instrument and can be estimated using sorting procedures on a per-column basis for individual scan and then statistically determined based on the large set of scan-based re-ordering patterns. There are two types of VIIRS geolocation files–ellipsoid based (GMODO) and terrain corrected (GMTCO). Over ocean, the two are very close although there may be some differences due to geoid variations and in the coastal areas. In the ACSPO, the terrain-corrected GMTCO is used. However, the unfolding of the bow-tie distortions is performed in conjunction with the near elliptical Earth’s shape, which requires using the ellipsoid geolocation file, GMODO.
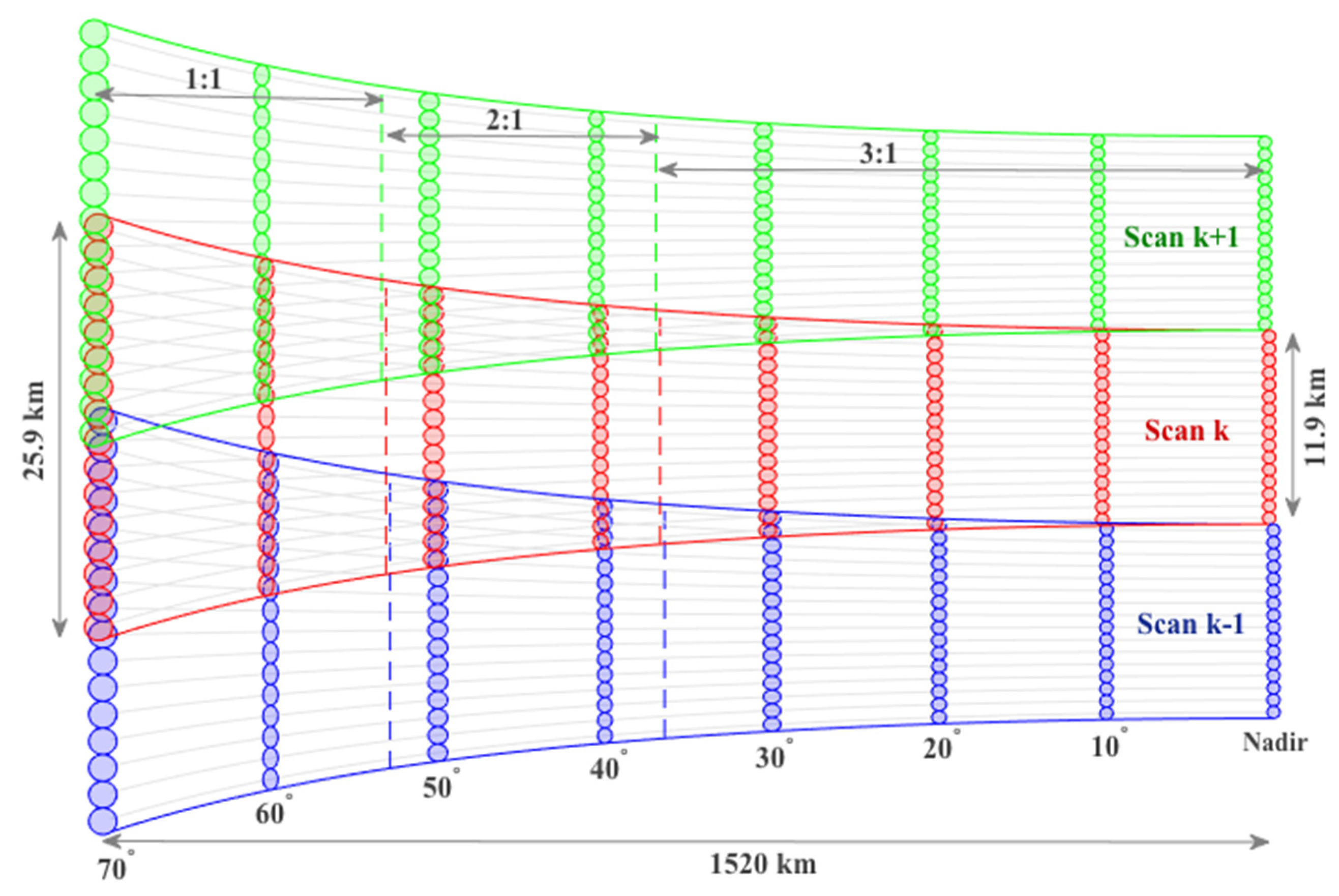
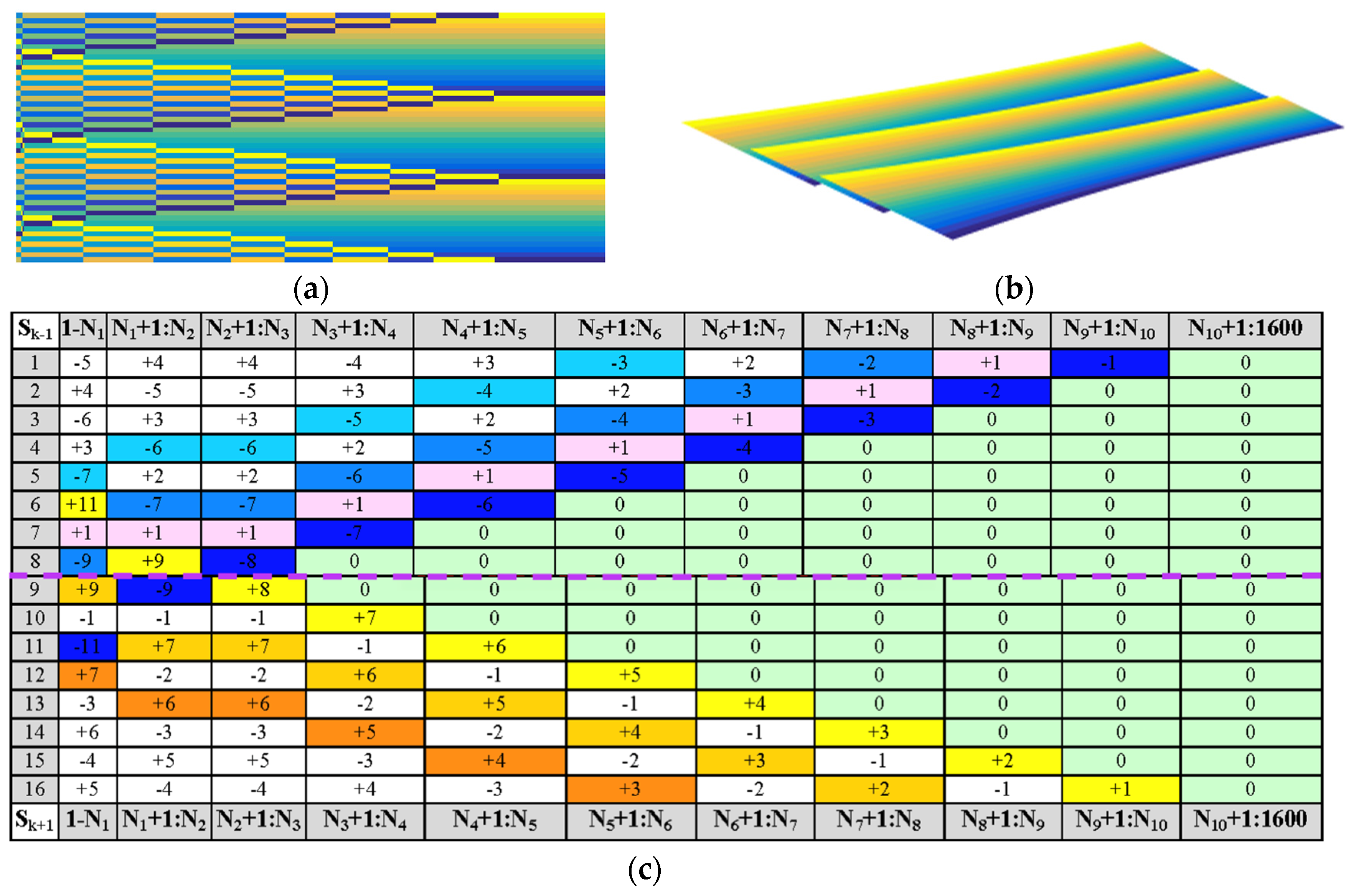
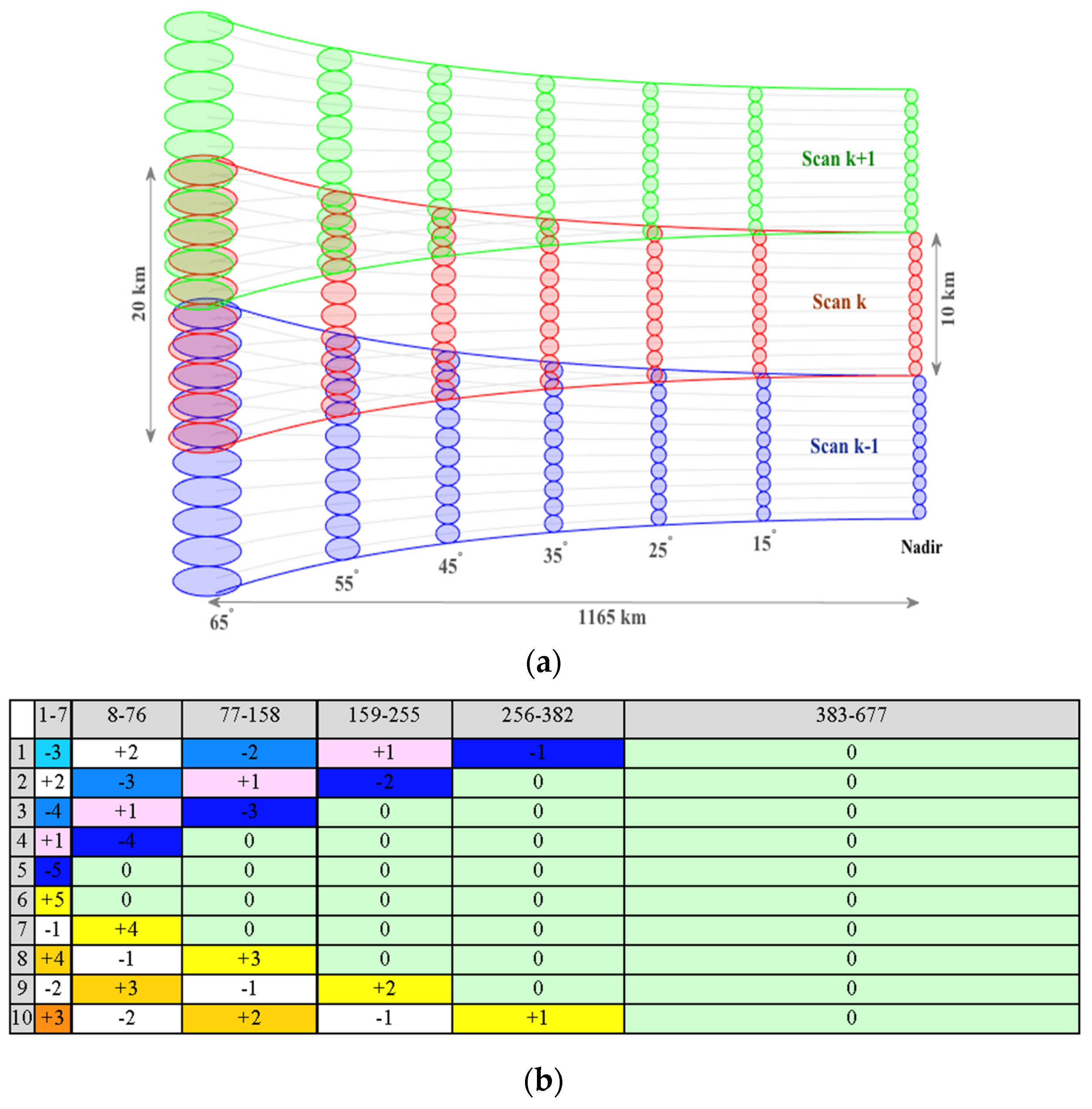
Figure 5a,b demonstrates the effect of unfolding for three consecutive scans. The detectors are shown with 16 distinct colors, ranging from yellow (for detector 1) to blue (for detector 16). The center of the swath (the nadir) has no overlap, so the original order remains the same. In
Figure 5 this corresponds to a monotonic color change within individual scans from yellow to blue.
The unfolding pattern corresponding to
Figure 5a,b is illustrated in
Figure 5c, for one scan S
k. Only the left half-scan is shown in
Figure 5c; to extend the unfolding procedure to the right side, the table should be reflected symmetrically with respect to the nadir. The rows in the
Figure 5c correspond to VIIRS detectors and the columns define the column ranges with identical re-ordering pattern.
Figure 5.
Three consecutive VIIRS whiskbrooms for the left half of the scan (from the edge of the swath to the nadir): (a) in swath projection (along with sorting patterns); (b) in the mapped projection. The detectors are shown with distinct colors ranging from yellow (detector 1) to blue (detector 16); and (c) reordering scheme corresponding to the left half of the VIIRS swath. The top and bottom halves of the reordering table are displaced intentionally, to emphasize that the corresponding sorting patterns may be different (see text for details).
Figure 5.
Three consecutive VIIRS whiskbrooms for the left half of the scan (from the edge of the swath to the nadir): (a) in swath projection (along with sorting patterns); (b) in the mapped projection. The detectors are shown with distinct colors ranging from yellow (detector 1) to blue (detector 16); and (c) reordering scheme corresponding to the left half of the VIIRS swath. The top and bottom halves of the reordering table are displaced intentionally, to emphasize that the corresponding sorting patterns may be different (see text for details).
Numbers in each cell represent the amount of shift for each of 16 rows in the scan Sk during the reordering. Positive values correspond to an increase of the row index and negatives correspond to the decrease of the row index. Zeros represent no change (no re-ordering). Some of the cells are color coded to facilitate the visual perception of the proposed re-ordering.
The dark blue cells, appearing together as a “ribbon” running across
Figure 5c, correspond to a propagation of the last detector of the scan S
k-1, cutting through the scan S
k. The corresponding (negative) shifts, increasing in magnitude toward the end of the swath as the bow-tie overlaps increases, indicate the position of the last detector of the scan S
k-1. The lighter blue ribbon (2 cells up from the blue ribbon) corresponds to the 15nd detector of the scan S
k-1. These two ribbons are separated by a “pink ribbon” with a + 1 shift corresponding to the pixels in the same central scan, S
k (which in many cases, take the spaces on the blue ribbon). Another ribbon two more lines above, shown in cyan, stands for the 14th detector in the S
k-1. Corresponding propagation of the 1st–3rd detectors from the next scan, S
k+1, are shown in yellow-to-orange colors. In this particular case, the pattern for the propagation from S
k+1 into S
k are symmetric to that of S
k-1 into S
k, but generally speaking, this may not be always the case for the VIIRS.
3.2. Adjustments to the Generic Break Points
There are a total of 21 reordering zones determined by 20 break points, Ni, corresponding to column indexes where the reordering pattern changes. The central zone centered on the nadir (where no reordering is needed; columns 1600 and 1601) is sandwiched between N10 and N11. The break points are the positions where the grid lines of Sk intersect with the grid lines of Sk-1 and Sk+1. The upper (detectors 1 through 8) and the lower (detectors 9 through 16) parts of the table can have different break points, as the middle scan Sk can have different overlaps with the neighboring scans, Sk-1 and Sk+1, caused by a slight variation in the sub-satellite track. Our analyses of VIIRS data suggest that such scan-to-scan variations of the sub-satellite track are small but sufficient to affect the reordering positions derived as one static set. The reordering pattern is thus general, but the break points Ni’s need per-scan adjustments.
The adjustment of the initial position of an individual break point, N
k, follows the general numerical approach for finding the zero of a function, given a good initial approximation. The goal function is the distance between the elliptical latitude/longitude pair of the last detector of S
k-1 at the current break point and the geo-location of the first eight detectors of S
k (for the upper part of the scan), and the first detector of S
k and the last eight detectors of S
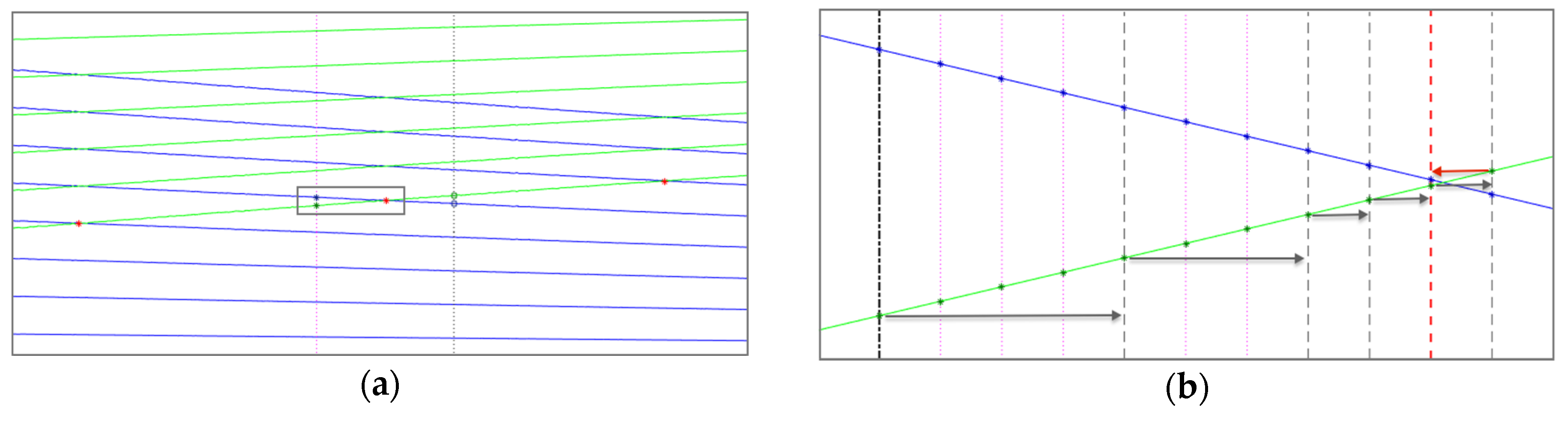
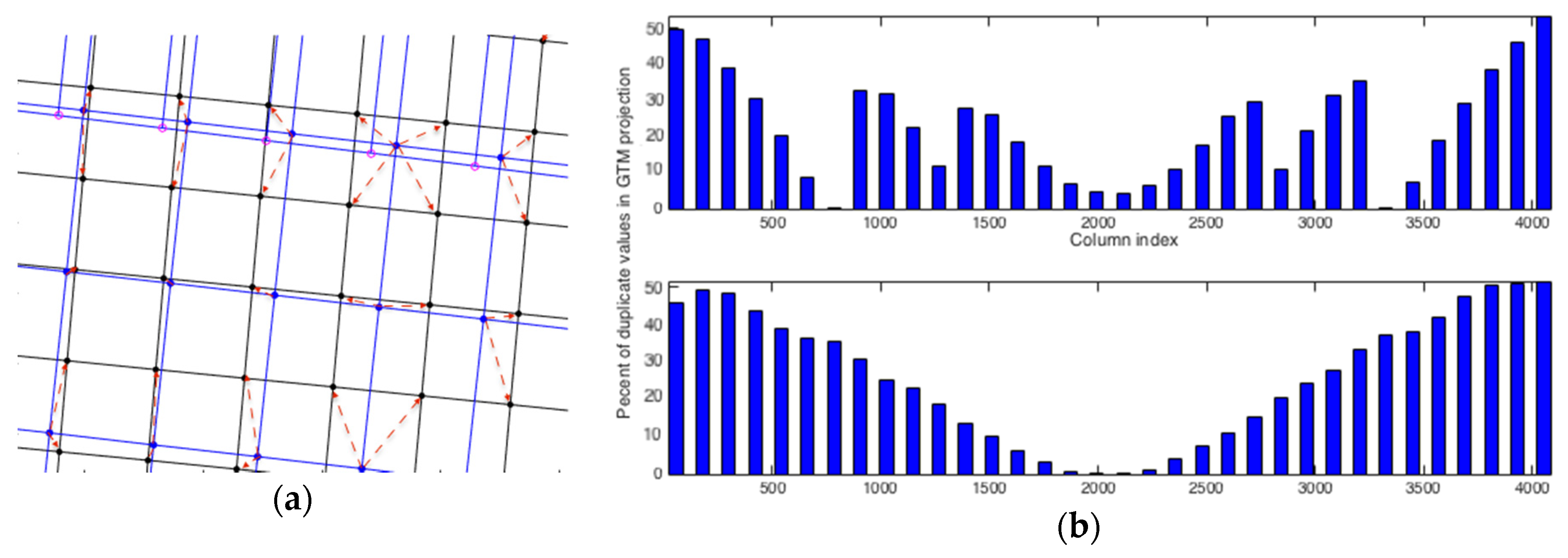
k+1 (for the lower part of the scan). Our implementation is using haversine formula for orthodromic distance. The schematic of the iterative procedure for break point adjustment is shown in
Figure 6, where the crossing of the grid line of the 16th detector of S
k (green line) and the grid line of the 4th detector of S
k+1 (blue line) corresponds to the actual 4th break points that needs to be computed based on the initial approximation marked by the dashed dotted line in
Figure 6b.
Figure 6.
(a) Intersection of grid lines of Sk (green) and Sk+1 (blue). Break points are shown with red asterisks; (b) Iterative adjustment procedure: black dash-dotted line shows the column with the initial break point approximation; gray dashed lines correspond to intermediate steps of the iterative adjustment procedure with arrows indicating the direction in which adjustments occur, pointing from the current position to the next approximation. The red dashed line is the final position of the break point, which is the approximation before last in the iterative sequence, which continues until the difference between the latitude values changes the sign.
Figure 6.
(a) Intersection of grid lines of Sk (green) and Sk+1 (blue). Break points are shown with red asterisks; (b) Iterative adjustment procedure: black dash-dotted line shows the column with the initial break point approximation; gray dashed lines correspond to intermediate steps of the iterative adjustment procedure with arrows indicating the direction in which adjustments occur, pointing from the current position to the next approximation. The red dashed line is the final position of the break point, which is the approximation before last in the iterative sequence, which continues until the difference between the latitude values changes the sign.
3.3. Adjusting Longitude Values
The unfolding procedure described in
Section 3.1 and
Section 3.2, would almost meet requirements A
I–A
III, if it would not be for the relative displacement of the consecutive scans, caused by Earth rotation. As the VIIRS instrument completes its S
k’th scan and gets ready for S
k+1’th one, the Earth has rotated by a certain amount, depending on the latitude and on the instrument scan rate. This causes the grid displacements between consecutive scans by the amount of this rotation (
cf. Figure 7a for an example of displacement amounts between three consecutive scans at the end of the swath).
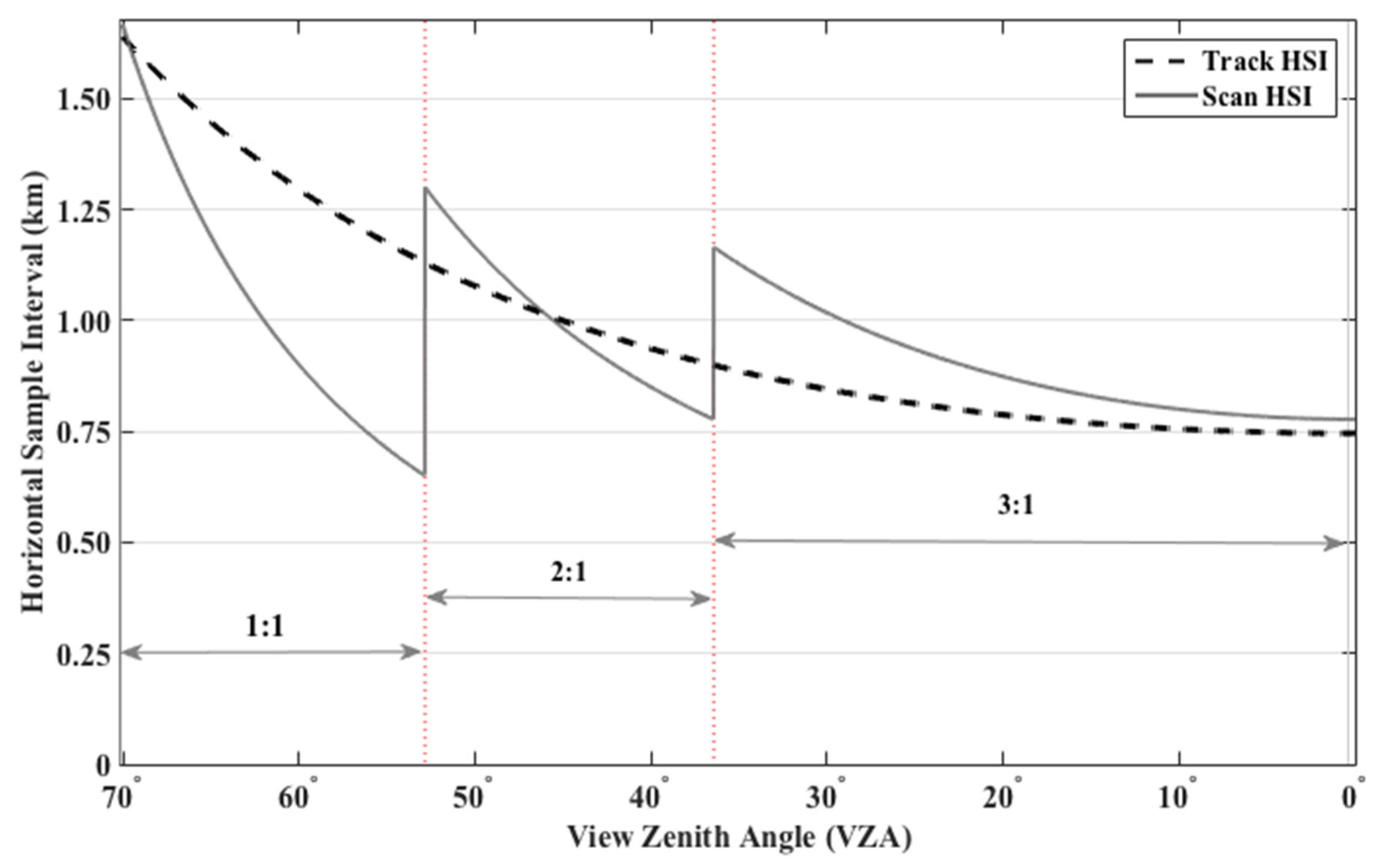
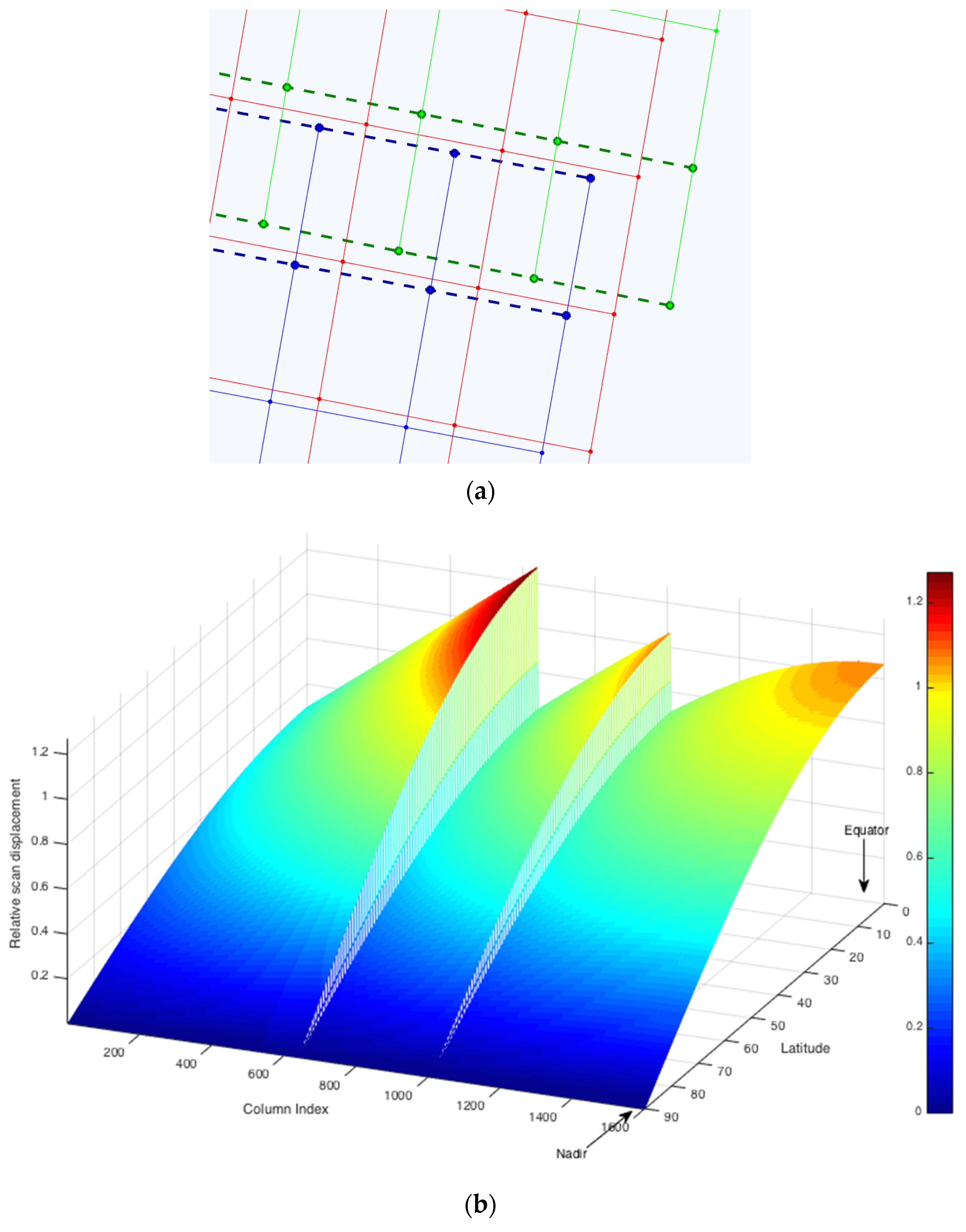
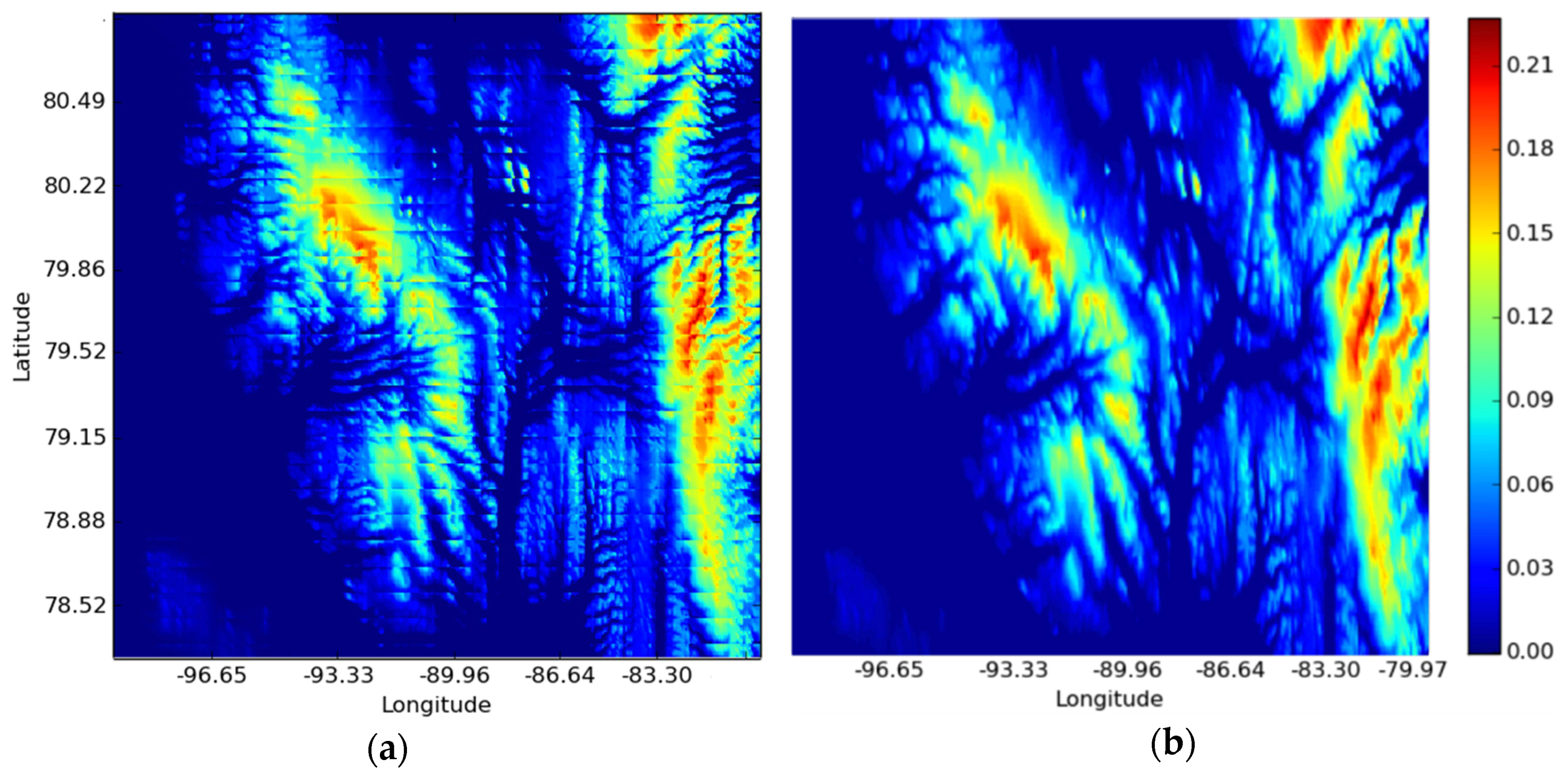
What really matters for the continuity assumption A
I, is the relative grid displacement with respect to the grid width. This ratio varies from the nadir to the end of the swath as shown in
Figure 3. The largest relative displacement is at the nadir for the scan that sweeps through the equator. For the VIIRS instrument, this displacement can exceed the pixel width (
i.e., ratio > 1), since the nominal VIIRS scan rate of 1.7864 s/scan and the speed of the Earth rotation at the equator is 2*pi*6380/(24*3600) km/s, resulting in the shift of ~0.828 km between the scans, which is larger than the 0.75 km pixel width at the nadir. However, there is no bow tie effect at the nadir, and reordering is done for columns 1:1307 and 1893:3200, where the pixels grow larger than 0.75 km. The relative displacement as a function of latitude and the pixel location in the swath (for the left half the swath) is shown in
Figure 7b. The orange-to-red values of the 2D relative displacement surface indicate the cases, where the relative scan displacement exceeds one pixel. This happens in the low latitudes (tropics) around the nadir position and at the beginning of each aggregation zone. The shifts at the end of the swath are at a sub-pixel level (in agreement with the example shown in
Figure 7a).
Figure 7.
(a) The geo-locations of three consecutive VIIRS scans near the end of the swath are shown in green, red and blue. Portions of the scans corresponding to onboard deletions are marked by dashed line; (b) Relative scan displacement as a function of latitude and scan position.
Figure 7.
(a) The geo-locations of three consecutive VIIRS scans near the end of the swath are shown in green, red and blue. Portions of the scans corresponding to onboard deletions are marked by dashed line; (b) Relative scan displacement as a function of latitude and scan position.
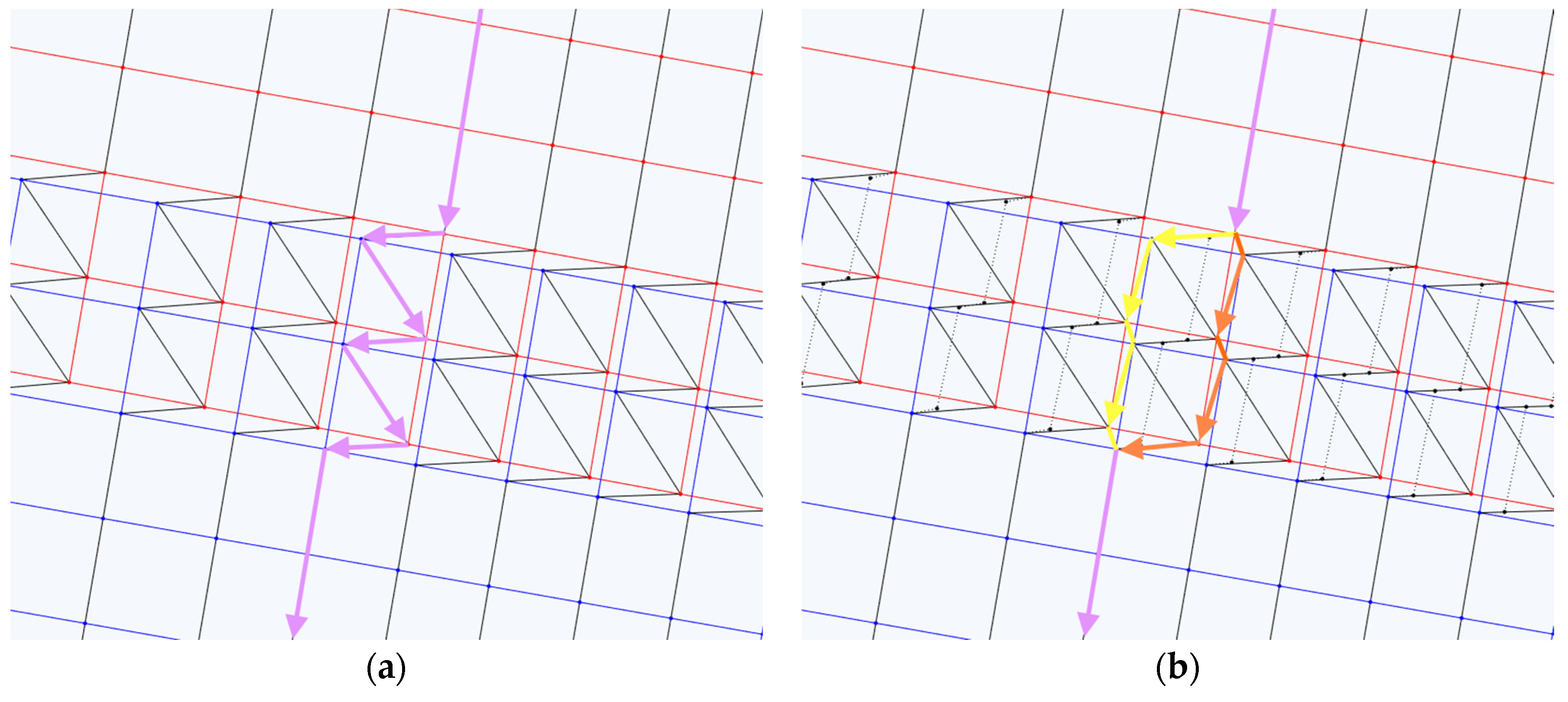
Figure 8a shows the grid overlap between scans S
k and S
k+1, around the transition from the 3:1 to the 2:1 aggregation zone. It is small but not negligible. The order of grid pixels-as they appear in a particular column of latitude and longitude arrays after unfolding-is traversed with magenta arrows. The zigzagging magenta path is caused by Earth rotation between consecutive scans, and the need to keep the swath projection non-displaced from one scan line to another. As long as the zigzagging is within the footprint boundaries (
i.e., the gridlines do not cross), the continuity (requirement A
I) is satisfied. The zigzagging exceeding the grid cell can affect the quality of the reordered SST imagery. It is especially noticeable along ocean thermal fronts or other features on the surface with large gradients.
Figure 8.
(a) Geo-locations around the transition from the 3:1 to the 2:1 sample aggregation scheme; magenta path connects interleaved footprints from different scans; (b) two alternate geo reordering schemes, involving column shifts, marked by yellow and orange paths.
Figure 8.
(a) Geo-locations around the transition from the 3:1 to the 2:1 sample aggregation scheme; magenta path connects interleaved footprints from different scans; (b) two alternate geo reordering schemes, involving column shifts, marked by yellow and orange paths.
One possible alternative to preserve the values of the original geo-grid and to mitigate the zigzagging effect is to additionally reorder columns. An example of such possible reordering is shown in
Figure 8b with two alternative orders (marked by yellow and orange paths, respectively). Both paths would require a change of the original 3200 column setting to allow for the shifts persistently present between consecutive scans. A more attractive approach was deemed to (slightly) adjust the longitudes, which also ensures the spatial continuity while preserving the swath width intact. An example of this adjustment is shown in
Figure 8b, with the new grid lines marked by dotted lines and new grid points by black dots. Note that only the longitudes are (slightly) changed, while the latitudes are reordered but not modified. The grid overlaps for scans S
k-1, S
k, and S
k+1 around the transition from the 2:1 to the 1:1 sample aggregation scheme are shown in
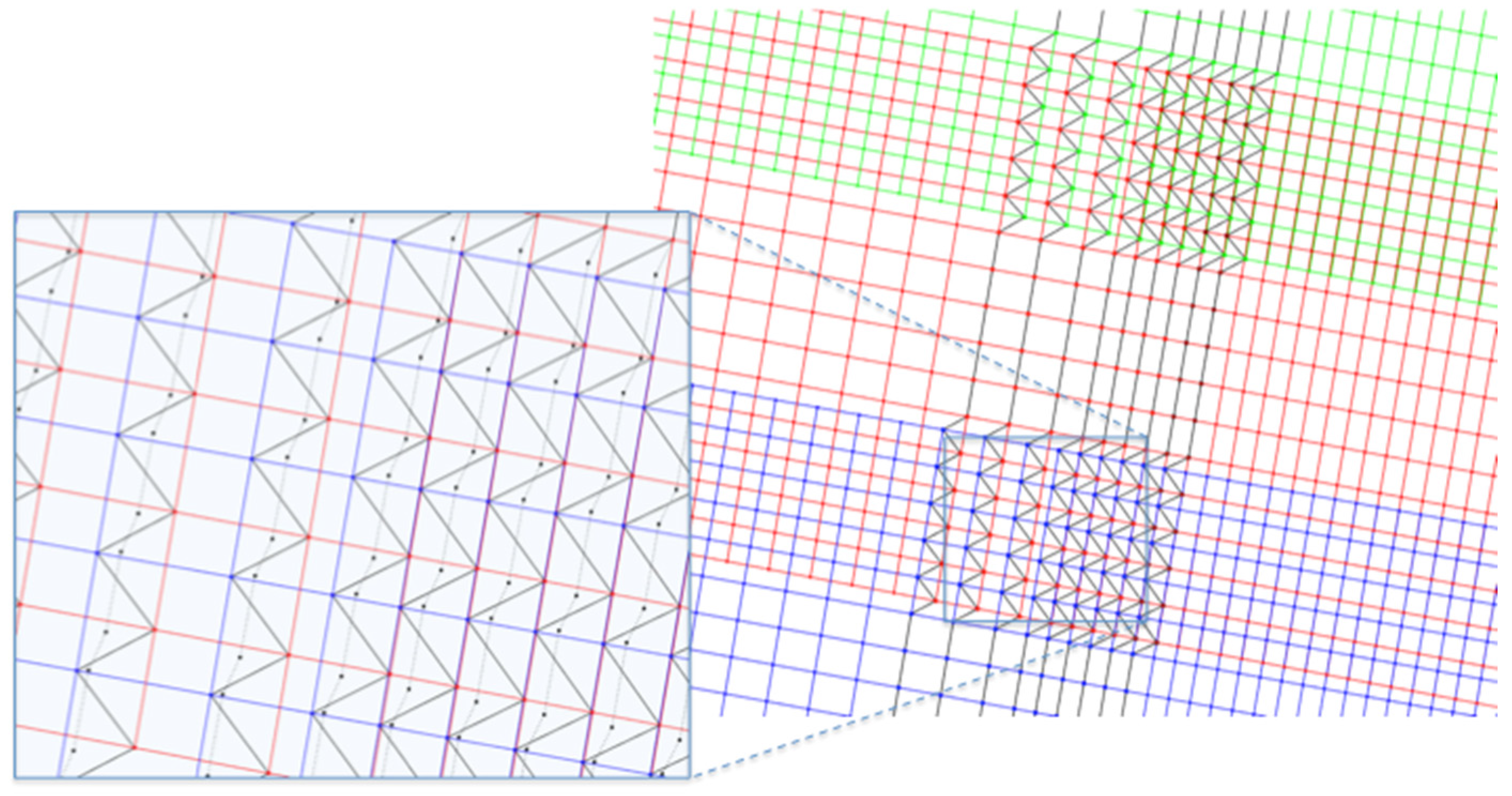
Figure 9.
Figure 9.
Geo-locations around the transition from the 2:1 to the 1:1 sample aggregation scheme. Unfolding order for this region corresponds to the N
5 +1:N
6 column of
Figure 5c with only six middle detectors, 6 through 11, outside the bow-tie region. The insert on the left shows detailed overlap of the S
k and S
k+1 grids. Black zigzagging line represents reordered path and black dotted line corresponds to proposed grid with adjusted longitude values.
Figure 9.
Geo-locations around the transition from the 2:1 to the 1:1 sample aggregation scheme. Unfolding order for this region corresponds to the N
5 +1:N
6 column of
Figure 5c with only six middle detectors, 6 through 11, outside the bow-tie region. The insert on the left shows detailed overlap of the S
k and S
k+1 grids. Black zigzagging line represents reordered path and black dotted line corresponds to proposed grid with adjusted longitude values.
The overlap due to bow-ties is significant and the unfolding order for this region corresponds to the N
5+1:N
6 region of
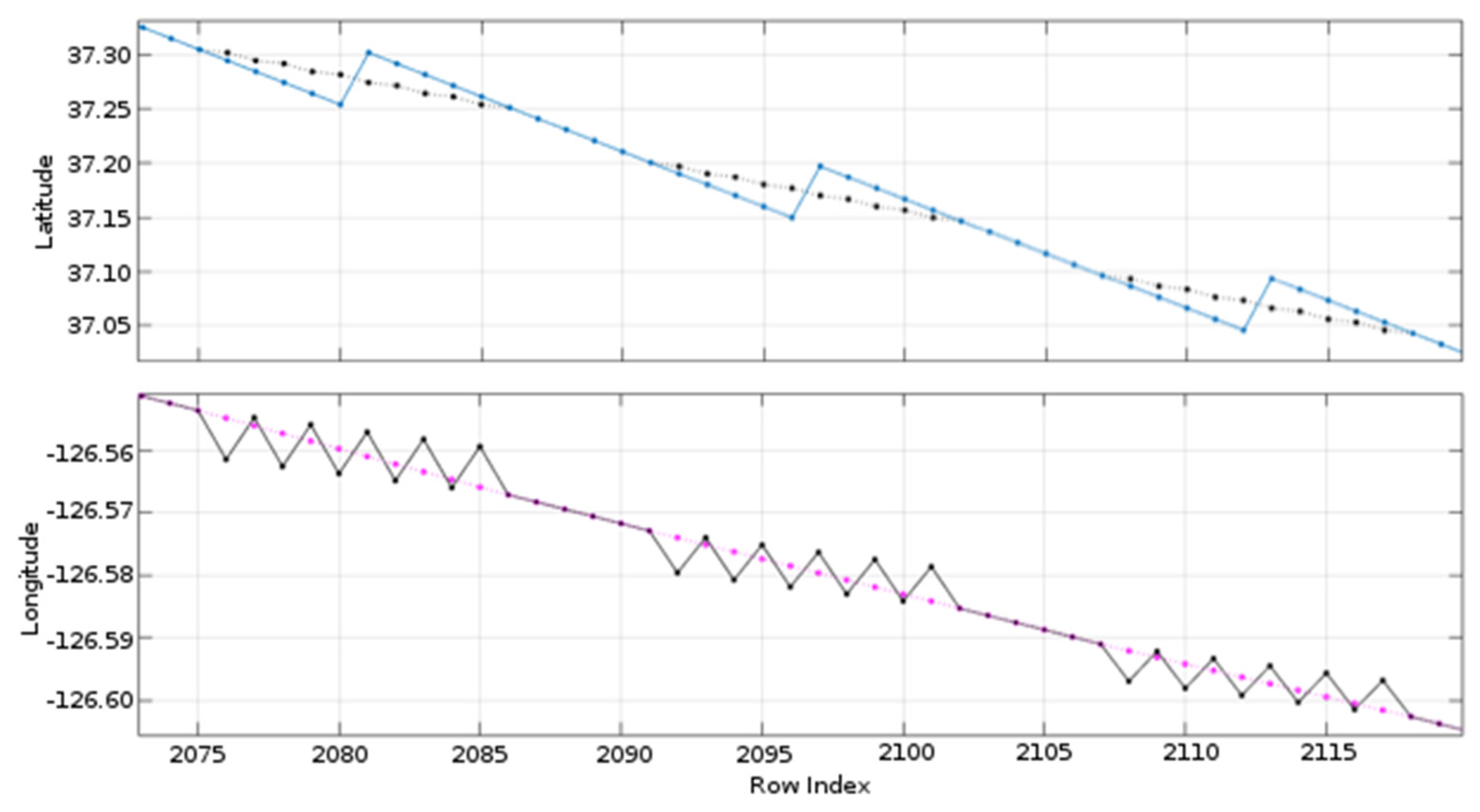
Figure 5c. The latitude and longitude values for one column in this region zoomed into two scan’s overlap are plotted in
Figure 10 (top plot). The blue line in the latitude plot corresponds to the original scan order. The black dotted line (top plot of
Figure 10) shows the latitude values after reordering, which makes the plot monotonic. Reordered longitudes, shown in a black solid line in
Figure 10 (bottom plot) have a zigzagging pattern, as expected due to the described relative scan displacement. Simple (and computationally fast) 1D per-column interpolation, preserving the longitudes that have not been reordered (
cf. cells with “0” entries in
Figure 5c), results in the monotonic longitude values shown in magenta. Adjustments to the longitudes are only done for the reordered pixels. The corresponding modified grid is shown in the insert of
Figure 9, where the gridlines are marked by black dotted lines and black dots correspond to new (longitude-adjusted) geo-locations.
Figure 10.
Top: Latitude values for the middle column of the grid portion shown in
Figure 9. Blue line represents original latitude values and black line corresponds to latitudes reordered according to
Figure 5c.
Bottom: Longitude values for the same column. Black line corresponds to longitudes reordered according to
Figure 5c. Zigzagging effect caused by Earth rotation is present at the bow-tie regions after reordering. Magenta line, representing adjusted longitudes, is monotonic. The adjustments are performed only at the overlapping portions of the consecutive scans.
Figure 10.
Top: Latitude values for the middle column of the grid portion shown in
Figure 9. Blue line represents original latitude values and black line corresponds to latitudes reordered according to
Figure 5c.
Bottom: Longitude values for the same column. Black line corresponds to longitudes reordered according to
Figure 5c. Zigzagging effect caused by Earth rotation is present at the bow-tie regions after reordering. Magenta line, representing adjusted longitudes, is monotonic. The adjustments are performed only at the overlapping portions of the consecutive scans.
Note that some (but not all) of the pixels whose longitudes are adjusted, correspond to the deleted onboard data (orange and magenta pixels of
Figure 1), making changes to their geolocation easier to justify. For the resulting de-bowtized imagery to be used for image-processing SST applications, the missing radiances in the deleted pixels should be evaluated.
3.4. Approximation of the Deleted Values
With all of the reordering work done, the estimating of the missing values is a straightforward task: in the resampled imagery, the index-based neighbors are now also geo-neighbors, which makes distance-based weighted averaging a simple and well-justifiable option. For each onboard deleted value, we use the four closest (±1 row/column) neighbors and compute the Gaussian-weighted average with standard deviation proportional to the corresponding vertical footprint size. There might be some flagged values among those neighbors due to the present deletion/reordering scenario, but a closer look at
Figure 5c reveals that there are always some non-deleted entries among the selected four horizontal/vertical neighbors. There might be cases when all four neighbors are flagged for some other reason (not relevant to onboard deletion). All of the flagged values are excluded from the averaging procedure, and when all four neighbors are flagged, then the deleted pixel is marked as invalid.
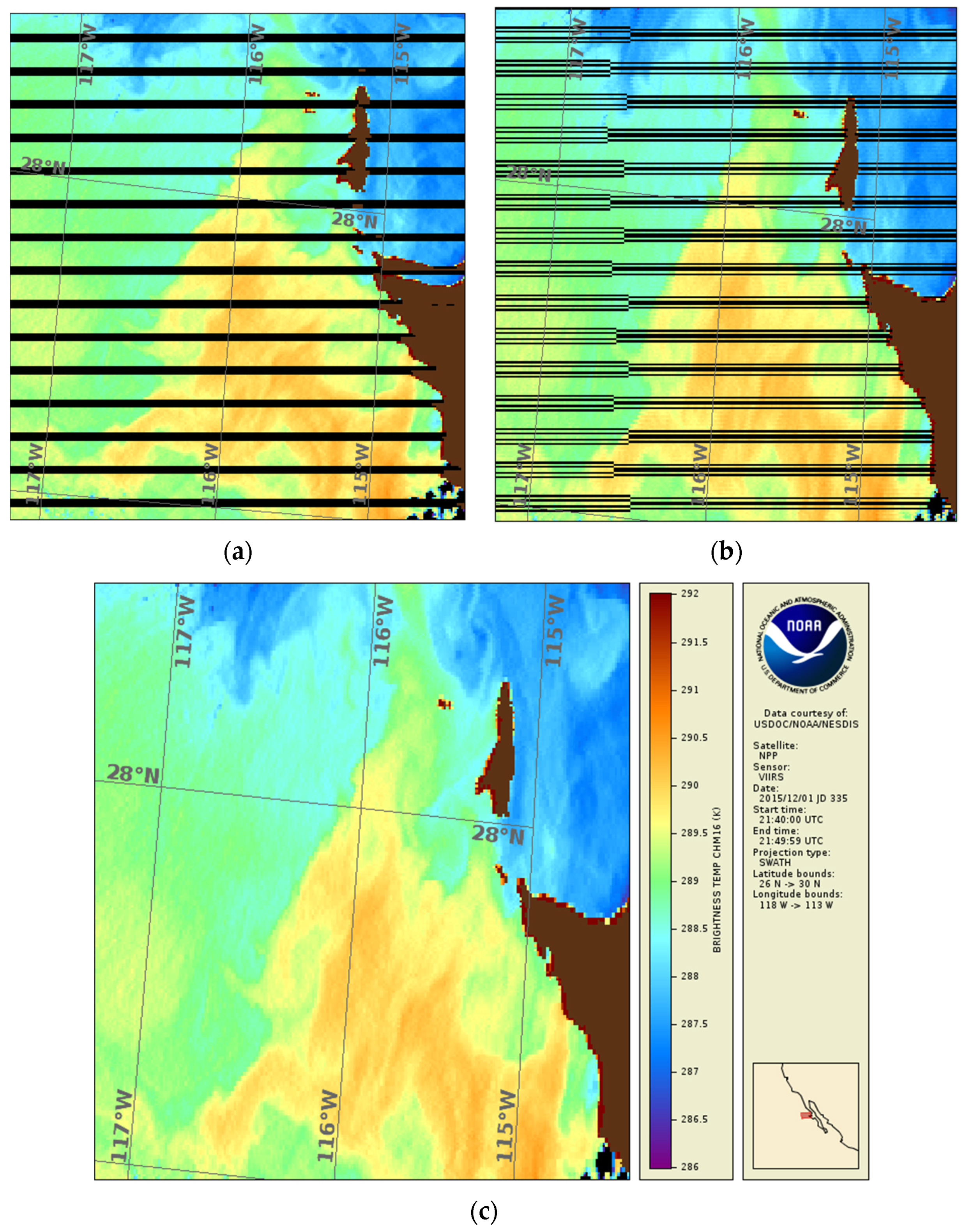
An example of resampled brightness temperature BT at 12 μm with estimated values in the deleted zones is shown in
Figure 11c. For comparison, the original BT at 12 μm is given in
Figure 11a. The presented crop is selected from the 10 min ACSPO granule acquired on 1 December 2015 at 21:40 UTC. “Repeats” typical for bow-tie distortions, which were apparent in
Figure 11a, are not present in the unfolded reordered image shown in
Figure 11b. The re-ordered image in
Figure 11b also reveals the variation of the break-points, discussed in the
Section 3.2. A zigzagging pattern, especially noticeable along thermal fronts, is also noticeable in the re-ordered image. Corrections to the longitude values, discussed in
Section 3.3, undo the zigzagging artifacts caused by the shifts, as can be seen from resampled image in
Figure 11c. The image shown in
Figure 11c now meets all the A
I-A
III requirements above, and ready for all planned SST imagery-based enhancements at NOAA.
Figure 11.
BT at 12 μm: (a) Original; (b) Reordered; (c) Resampled with missing values filled.
Figure 11.
BT at 12 μm: (a) Original; (b) Reordered; (c) Resampled with missing values filled.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



