
A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk




Abstract
:1. Introduction
2. Materials and Methods
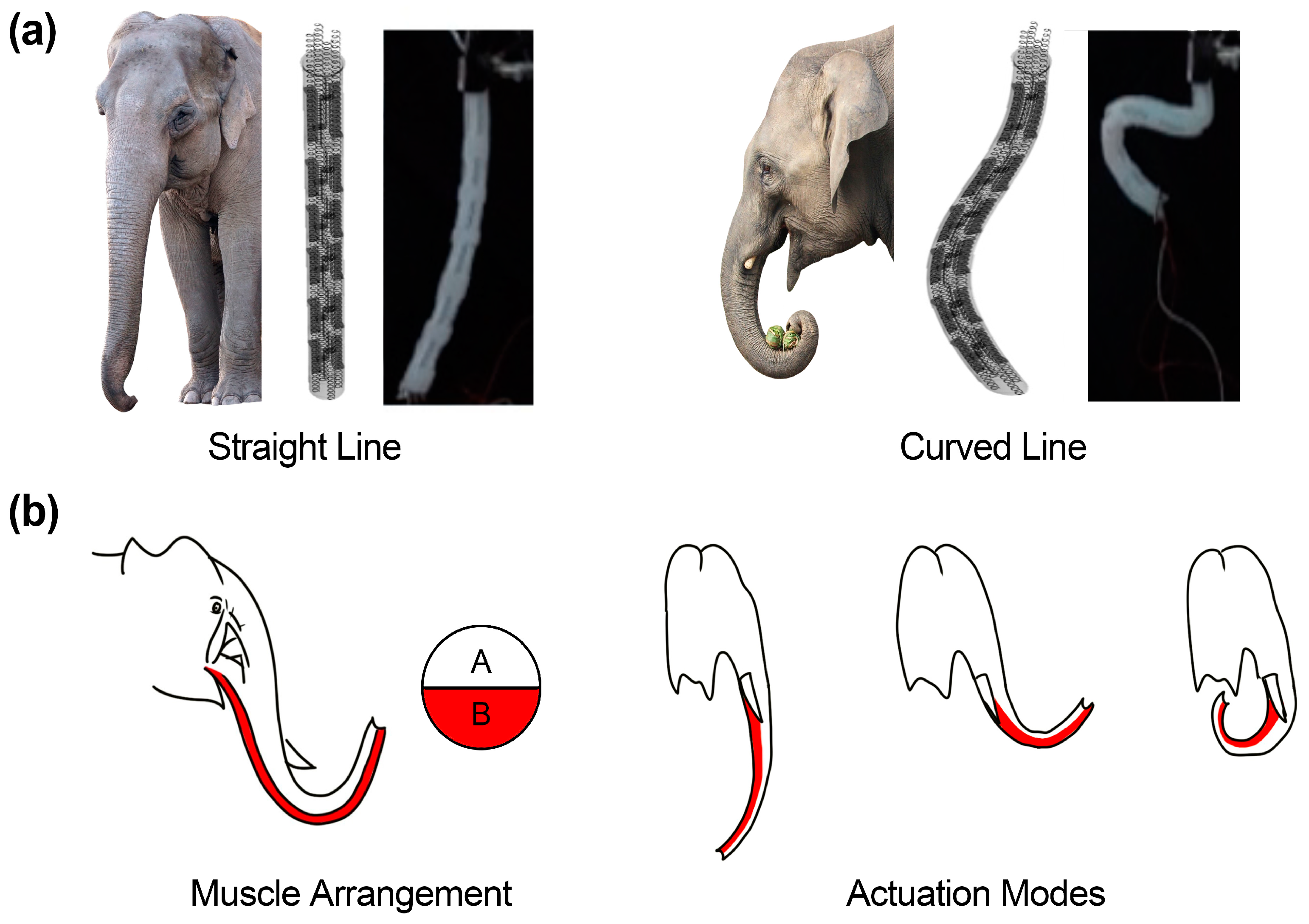
2.1. Biomimicry of An Elephant’s Trunk
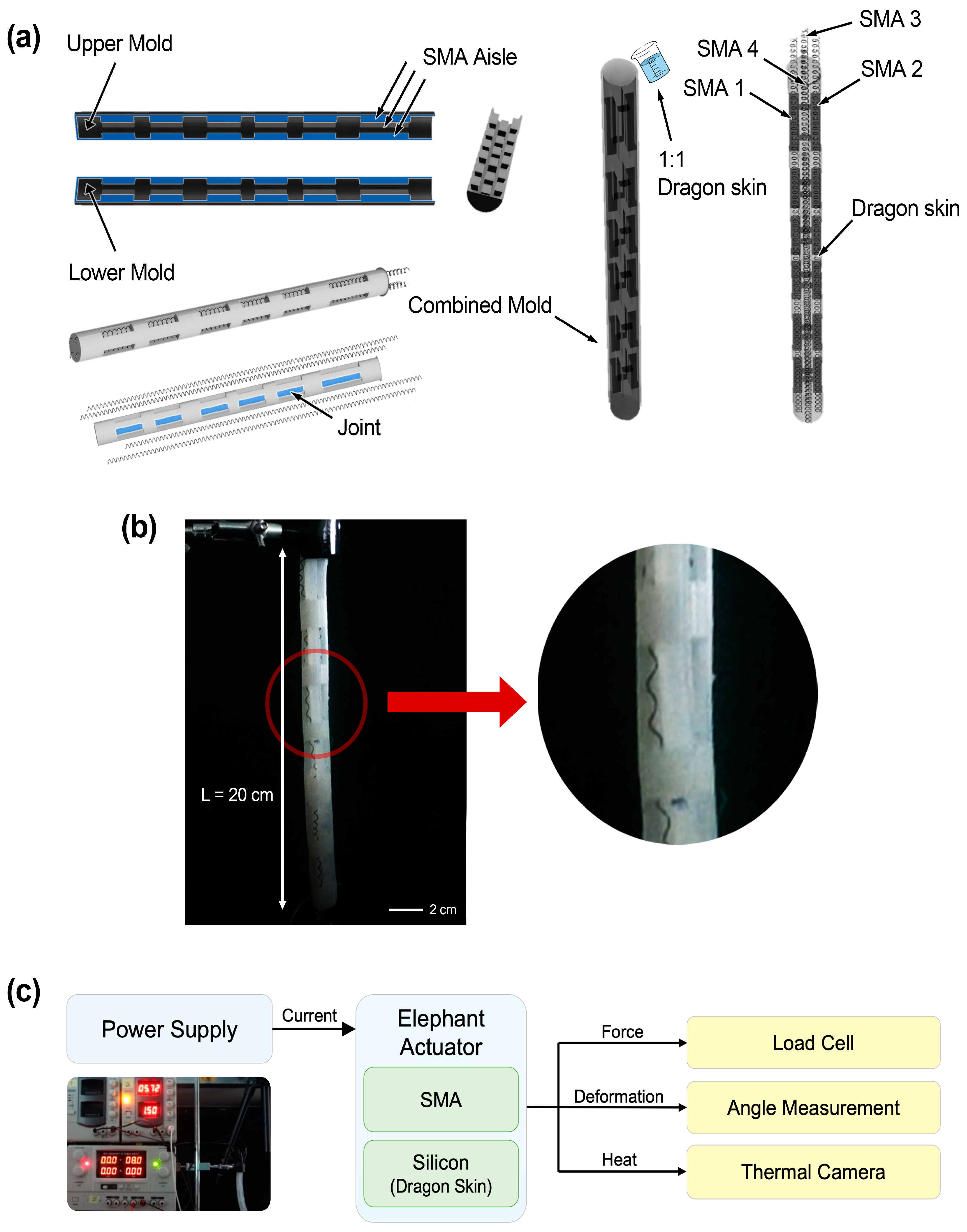
2.2. Materials, Fabrications, and Evaluation Methods
3. Results
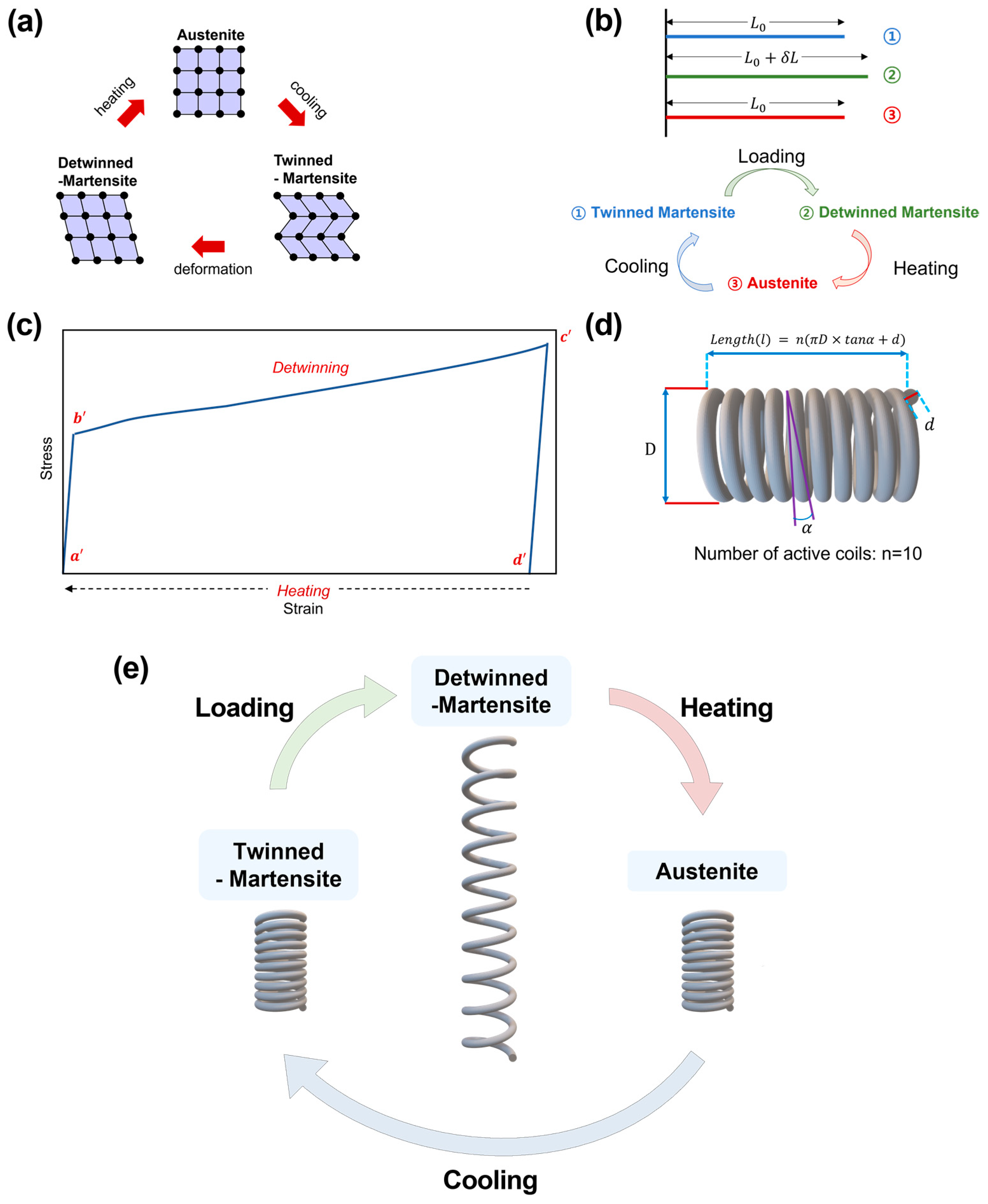
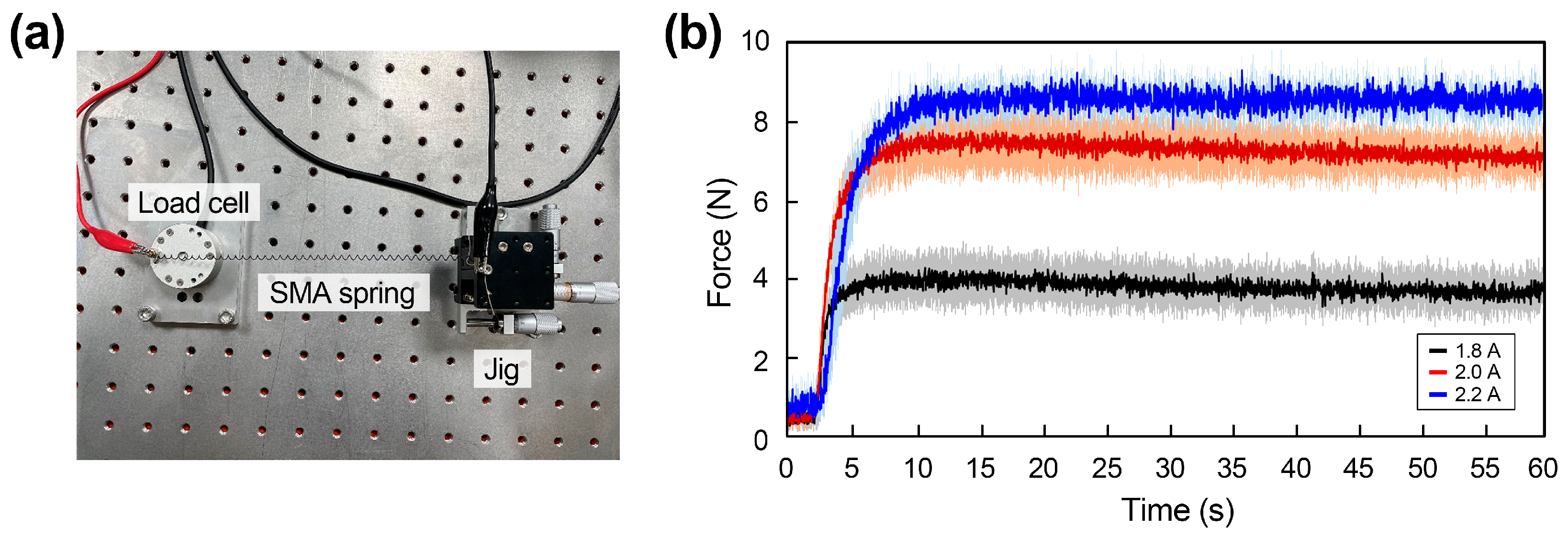
3.1. Experiments on SMA Springs
3.2. Performance Evaluations of Bending Behaviors of Elephant Trunk Actuators
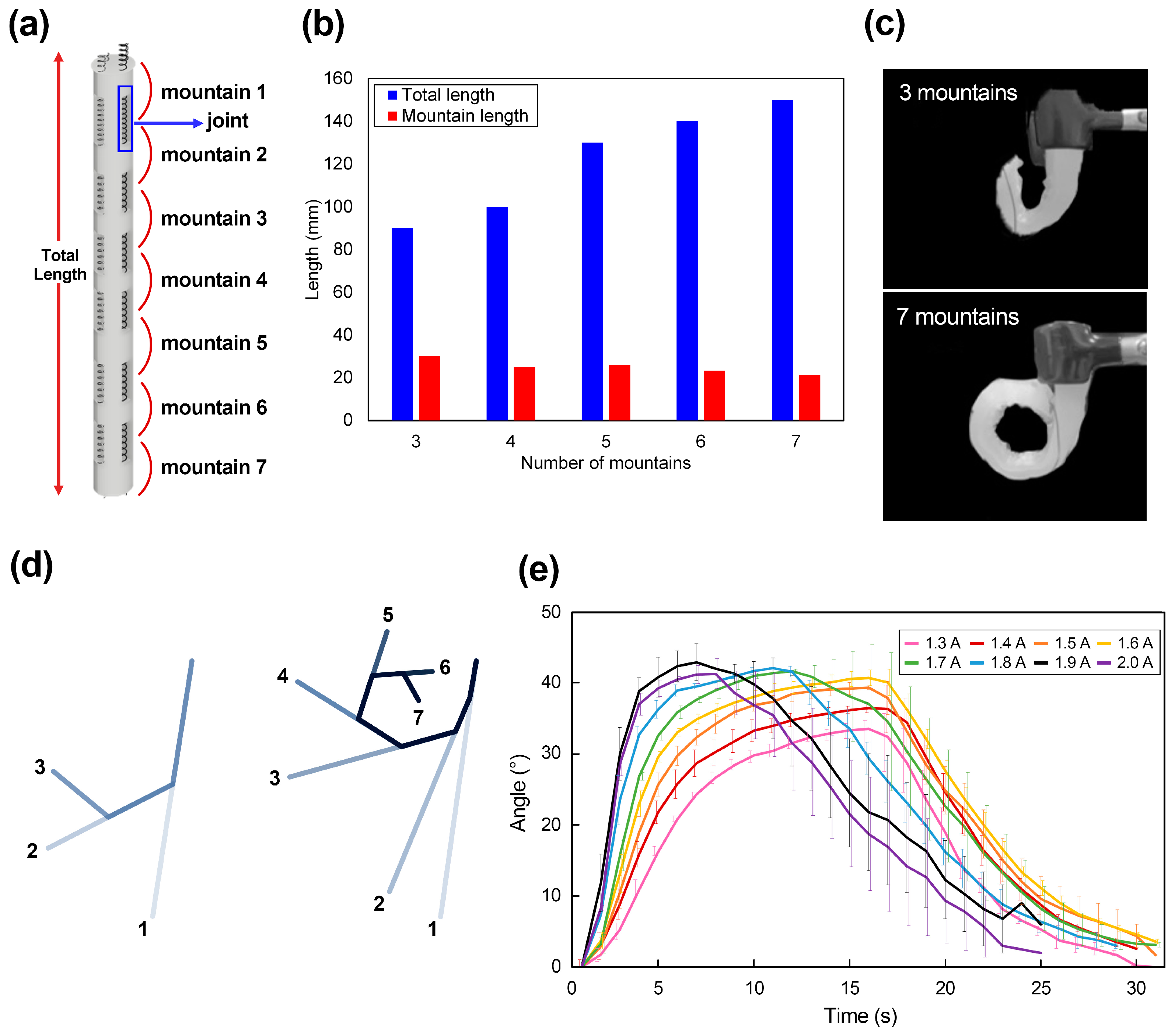
3.2.1. Effects of the Number of Soft Joints in the Actuators
3.2.2. Relationships between Electric Current and Deformation
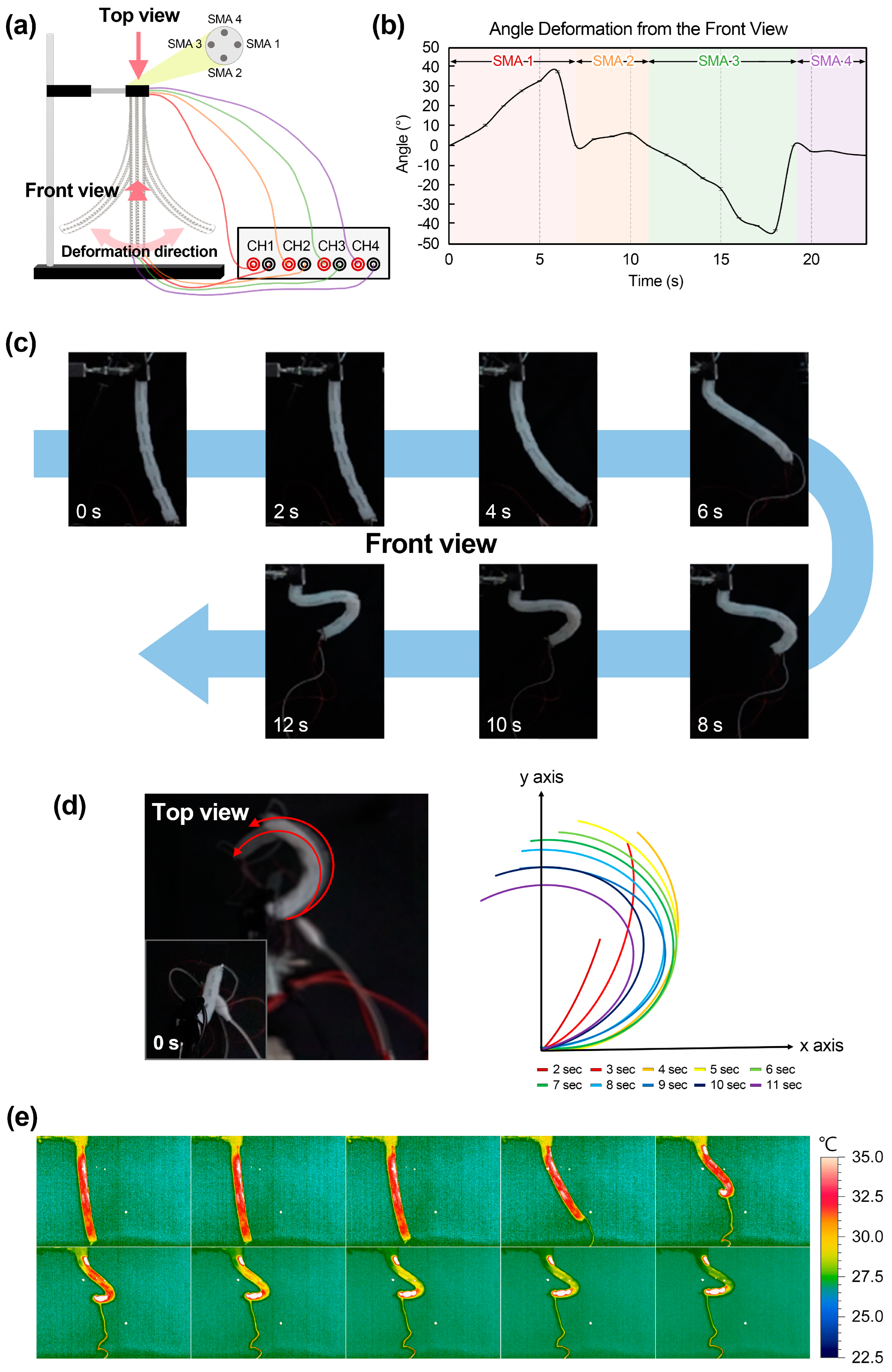
3.3. Evaluations for Multi-Axis Actuation
3.3.1. Motion Evaluations for Three-Dimensional Deformation
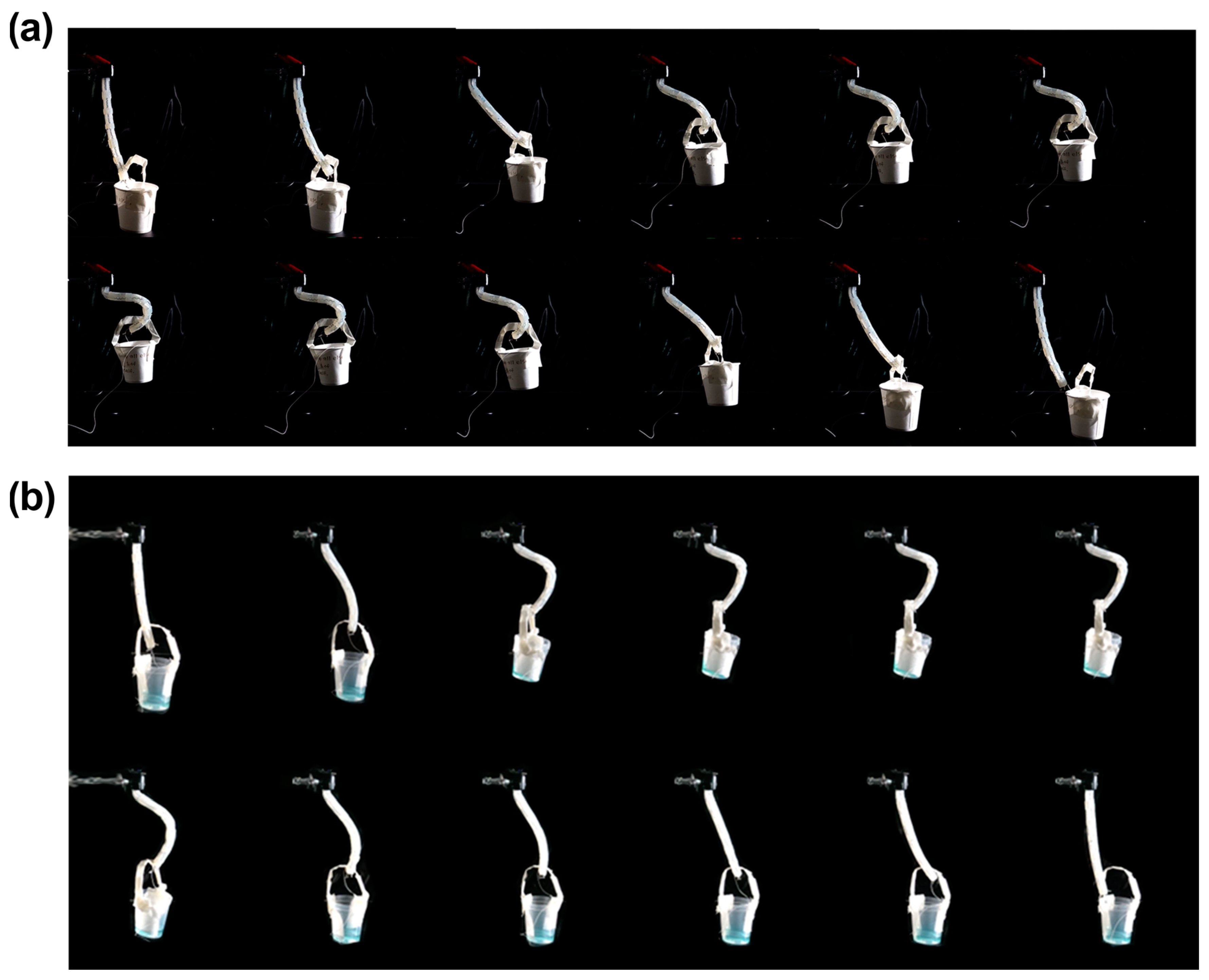
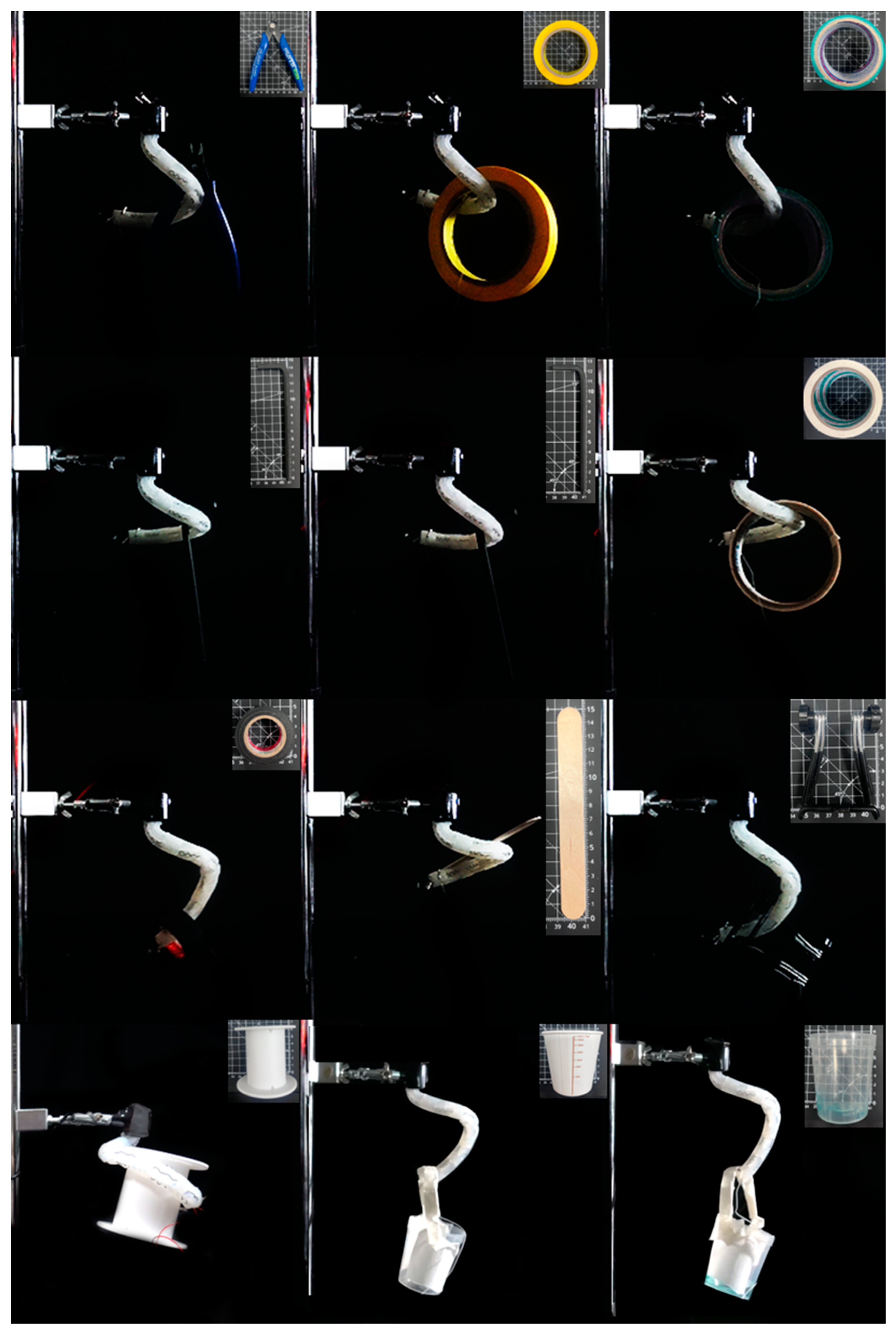
3.3.2. Lifting Experiments
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Furukawa, S.; Wakimoto, S.; Kanda, T.; Hagihara, H. A soft master-slave robot mimicking octopus arm structure using thin artificial muscles and wire encoders. Actuators 2019, 8, 40. [Google Scholar] [CrossRef] [Green Version]
- Xu, M.; Rong, C.; He, L. Design and Modeling of a Bio-Inspired Flexible Joint Actuator. Actuators 2021, 10, 95. [Google Scholar] [CrossRef]
- Yoon, Y.; Park, H.; Lee, J.; Choi, J.; Jung, Y.; Han, S.; Ha, I.; Ko, S.H. Bioinspired untethered soft robot with pumpless phase change soft actuators by bidirectional thermoelectrics. Chem. Eng. J. 2023, 451, 138794. [Google Scholar] [CrossRef]
- Chaurasiya, K.L.; Harsha, A.; Sinha, Y.; Bhattacharya, B. Design and development of non-magnetic hierarchical actuator powered by shape memory alloy based bipennate muscle. Sci. Rep. 2022, 12, 10758. [Google Scholar] [CrossRef]
- Xu, L.; Wagner, R.J.; Liu, S.; He, Q.; Li, T.; Pan, W.; Feng, Y.; Feng, H.; Meng, Q.; Zou, X. Locomotion of an untethered, worm-inspired soft robot driven by a shape-memory alloy skeleton. Sci. Rep. 2022, 12, 12392. [Google Scholar] [CrossRef]
- Ren, T.; Li, Y.; Xu, M.; Li, Y.; Xiong, C.; Chen, Y. A novel tendon-driven soft actuator with self-pumping property. Soft Robot. 2020, 7, 130–139. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Kim, D.-R.; Ahn, S.-H. Curved shape memory alloy-based soft actuators and application to soft gripper. Compos. Struct. 2017, 176, 398–406. [Google Scholar] [CrossRef]
- Zeng, X.; Su, H.-J. A High Performance Pneumatically Actuated Soft Gripper Based on Layer Jamming. J. Mech. Robot. 2023, 15, 014501. [Google Scholar] [CrossRef]
- Schulz, A.K.; Boyle, M.; Boyle, C.; Sordilla, S.; Rincon, C.; Hooper, S.; Aubuchon, C.; Reidenberg, J.S.; Higgins, C.; Hu, D.L. Skin wrinkles and folds enable asymmetric stretch in the elephant trunk. Proc. Natl. Acad. Sci. USA 2022, 119, e2122563119. [Google Scholar] [CrossRef]
- Center of Elephant And Wildlife Health. Elephant Anatomy and Biology. Available online: https://www.asianelephantresearch.com/ (accessed on 24 April 2022).
- Hannan, M.; Walker, I. The’elephant trunk’manipulator, design and implementation. In Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Proceedings (Cat. No. 01TH8556), Como, Italy, 8–12 July 2001; pp. 14–19. [Google Scholar]
- Mianpet, K.; Thusneyapan, S. A Dynamic Model for Simulating Elephant-Lifting by Using a Tilting Frame. Eng. J. 2020, 24, 195–206. [Google Scholar] [CrossRef]
- Choi, K.; Park, S.J.; Won, M.; Park, C.H. Soft fabric muscle based on thin diameter SMA springs. Smart Mater. Struct. 2022, 31, 055020. [Google Scholar] [CrossRef]
- Hwang, J.; Wang, W.D. Shape Memory Alloy-Based Soft Amphibious Robot Capable of Seal-Inspired Locomotion. Adv. Mater. Technol. 2022, 7, 2101153. [Google Scholar] [CrossRef]
- Ye, T.; Wang, Y.; Xu, S.; Wang, Y.; Li, J. Modeling and motion control of an octopus-like flexible manipulator actuated by shape memory alloy wires. J. Intel. Mat. Syst. Str. 2022, 33, 3–16. [Google Scholar] [CrossRef]
- Luong, T.; Park, C.; Doh, M.; Ha, Y.; Moon, H. Impedance control of antagonistically driven SMA springs. In Proceedings of the 2022 19th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 4–6 July 2022; pp. 307–312. [Google Scholar]
- Ruth, D.J.S.; Sohn, J.-W.; Dhanalakshmi, K.; Choi, S.-B. Control Aspects of Shape Memory Alloys in Robotics Applications: A Review over the Last Decade. Sensors 2022, 22, 4860. [Google Scholar] [CrossRef] [PubMed]
- Chang, A.H.; Freeman, C.; Mahendran, A.N.; Vikas, V.; Vela, P.A. Shape-centric modeling for soft robot inchworm locomotion. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 645–652. [Google Scholar]
- Liu, R.; Zhao, H.; Wang, L.; Jin, J.; Wu, Y. Design and development of a novel piezoelectric caudal fin-like underwater thruster with a single vibration mode. Rev. Sci. Instrum. 2022, 93, 113545. [Google Scholar] [CrossRef] [PubMed]
- Sui, T.; Zou, T. A Review of Bat-Inspired Shape Morphing Robotic Design. J. Mech. Robot. 2022, 14, 050801. [Google Scholar] [CrossRef]
- Luo, Y.; Zhao, N.; Shen, Y.; Li, P. A rigid morphing mechanism enabled earthworm-like crawling robot. J. Mech. Robot. 2023, 15, 011008. [Google Scholar] [CrossRef]
- Li, J.; Huang, Y. Design and Control of Turtle Locomotion-Inspired Robots Actuated By Antagonistic Shape Memory Alloy Springs. IEEE/ASME Trans. Mechatron. 2022, 27, 4851–4862. [Google Scholar] [CrossRef]
- Ahmed, F.; Waqas, M.; Shaikh, B.; Khan, U.; Soomro, A.M.; Kumar, S.; Ashraf, H.; Memon, F.H.; Choi, K.H. Multi-material Bio-inspired Soft Octopus Robot for Underwater Synchronous Swimming. J. Bionic Eng. 2022, 19, 1229–1241. [Google Scholar] [CrossRef]
- Stano, G.; Ovy, S.A.I.; Edwards, J.R.; Cianchetti, M.; Percoco, G.; Tadesse, Y. One-shot additive manufacturing of robotic finger with embedded sensing and actuation. Int. J. Adv. Manuf. Technol. 2022, 124, 467–485. [Google Scholar] [CrossRef]
- Stano, G.; Ovy, S.A.I.; Percoco, G.; Zhang, R.; Lu, H.; Tadesse, Y. Additive Manufacturing for Bioinspired Structures: Experimental Study to Improve the Multimaterial Adhesion Between Soft and Stiff Materials. 3D Print. Addit. Manuf. 2023. [Google Scholar] [CrossRef]
- Bodkhe, S.; Vigo, L.; Zhu, S.; Testoni, O.; Aegerter, N.; Ermanni, P. 3D printing to integrate actuators into composites. Addit. Manuf. 2020, 35, 101290. [Google Scholar] [CrossRef]
- Preechayasomboon, P.; Rombokas, E. Negshell casting: 3D-printed structured and sacrificial cores for soft robot fabrication. PLoS ONE 2020, 15, e0234354. [Google Scholar] [CrossRef] [PubMed]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M. Soft robotics for chemists. Angew. Chem. 2011, 123, 1930–1935. [Google Scholar] [CrossRef]
- Modi, V.; Fulton, L.; Jacobson, A.; Sueda, S.; Levin, D.I. Emu: Efficient muscle simulation in deformation space. Comput. Graph. Forum 2021, 40, 234–248. [Google Scholar] [CrossRef]
- Hernandez, J.; Sunny, M.S.H.; Sanjuan, J.; Rulik, I.; Zarif, M.I.I.; Ahamed, S.I.; Ahmed, H.U.; Rahman, M.H. Current Designs of Robotic Arm Grippers: A Comprehensive Systematic Review. Robotics 2023, 12, 5. [Google Scholar] [CrossRef]
- Smooth-On, I. Dragon Skin Physical Property Table. Available online: https://www.smooth-on.com/ (accessed on 22 February 2023).
- Abuzaid, W.; Wu, Y.; Sidharth, R.; Brenne, F.; Alkan, S.; Vollmer, M.; Krooß, P.; Niendorf, T.; Sehitoglu, H. FeMnNiAl iron-based shape memory alloy: Promises and challenges. Shape Mem. Superelast. 2019, 5, 263–277. [Google Scholar] [CrossRef]
- Flexinol Technical Design and Data. Available online: https://dynalloy.com/ (accessed on 22 February 2023).
- Levintant-Zayonts, N.; Starzynski, G.; Kopec, M.; Kucharski, S. Characterization of NiTi SMA in its unusual behaviour in wear tests. Tribol. Int. 2019, 137, 313–323. [Google Scholar] [CrossRef]
- Han, M.W.; Ahn, S.H. Blooming Knit Flowers: Loop-linked Soft Morphing Structures for Soft Robotics. Adv. Mater. 2017, 29, 1606580. [Google Scholar] [CrossRef]
- Shin, J.; Han, Y.J.; Lee, J.H.; Han, M.W. Shape Memory Alloys in Textile Platform: Smart Textile-Composite Actuator and Its Application to Soft Grippers. Sensors 2023, 23, 1518. [Google Scholar] [CrossRef]
- Han, M.W.; Rodrigue, H.; Kim, H.I.; Song, S.H.; Ahn, S.H. Shape Memory Alloy/Glass Fiber Woven Composite for Soft Morphing Winglets of Unmanned Aerial Vehicles. Compos. Struct. 2016, 140, 202–212. [Google Scholar] [CrossRef]
- Han, M.W.; Rodrigue, H.; Cho, S.; Song, S.H.; Wang, W.; Chu, W.S.; Ahn, S.H. Woven type Smart Soft Composite for Soft Morphing Car Spoiler. Compos. Part B Eng. 2016, 86, 285–298. [Google Scholar] [CrossRef]
- Han, M.W.; Kim, M.S.; Ahn, S.H. Shape Memory Textile Composites with Multi-mode Actuations for Soft Morphing Skins. Compos. Part B Eng. 2020, 198, 108170. [Google Scholar] [CrossRef]
- Park, C.Y.; Lee, Y.A.; Jang, J.W.; Han, M.W. Origami and Kirigami Structure for Impact Energy Absorption: Its Application to Drone Guards. Sensors 2023, 23, 2150. [Google Scholar] [CrossRef]
- Bhatt, N.; Soni, S.; Singla, A. Analyzing the Effect of Parametric Variations on the Performance of Antagonistic SMA Spring Actuator. Mater. Today Commun. 2022, 31, 103728. [Google Scholar] [CrossRef]
- Shimoga, G.; Kim, T.-H.; Kim, S.-Y. An Intermetallic NiTi-Based Shape Memory Coil Spring for Actuator Technologies. Metals 2021, 11, 1212. [Google Scholar] [CrossRef]
- An, X.; Cui, Y.; Sun, H.; Shao, Q.; Zhao, H. Active-Cooling-in-the-Loop Controller Design and Implementation for an SMA-Driven Soft Robotic Tentacle. IEEE Trans. Robot. 2023, 1–17. [Google Scholar] [CrossRef]
- Cheng, S.S.; Kim, Y.; Desai, J.P. New actuation mechanism for actively cooled SMA springs in a neurosurgical robot. IEEE Trans. Robot. 2017, 33, 986–993. [Google Scholar] [CrossRef]
- Alcaide, J.O.; Pearson, L.; Rentschler, M.E. Design, modeling and control of a SMA-actuated biomimetic robot with novel functional skin. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4338–4345. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Dragon Skin |
|---|---|
| Specific gravity | 1.08 g/cc |
| Tensile strength | 500 psi |
| 100% modulus | 86 psi |
| Specific gravity | <0.01 in./in. |
| Shore hardness | 30 A |
| Color | Translucent |
| Pot life | 45 min |
| Cure time | 960 min |
| Manufacturer | Smooth-On |
| Parameter | Value | Unit |
|---|---|---|
| Martensite start temperature () | 42 | °C |
| Martensite finish temperature () | 52 | °C |
| Austenite start temperature () | 68 | °C |
| Austenite finish temperature () | 78 | °C |
| Martensite, Young’s modulus () | 28 | GPa |
| Martensite, Shear modulus () | 11 | GPa |
| Austenite, Young’s modulus () | 75 | GPa |
| Austenite, Shear modulus ) | 28 | GPa |
| Diameter of wire | 1.37 | mm |
| Duration for Current Supply | 1.8 A | 2.0 A | 2.2 A |
|---|---|---|---|
| 10 s | 4.0 N | 7.4 N | 8.3 N |
| 20 s | 4.0 N | 7.4 N | 8.6 N |
| Fmax | 4.3 N | 7.8 N | 9.3 N |
| Target Objects | Diameter × Height (mm × mm) | Weight (g) | Shape Regularity |
|---|---|---|---|
| Yellow paper tape | 108 × 15 | 57.3 | Regular |
| Duct tape | 92 × 15 | 101.8 | Regular |
| White paper tape | 88 × 20 | 22.8 | Regular |
| Friction tape | 53 × 18 | 35.3 | Regular |
| Wooden stick | 150 × 16 × 1 | 2.3 | Slightly irregular |
| Big hexagonal wrench | 145 × 35 × 7 | 40.6 | Highly irregular |
| Small hexagonal Wrench | 125 × 30 × 5 | 24.6 | Highly irregular |
| Phone holder | 60 × 85 × 30 | 48.8 | Highly irregular |
| Nipper | 130 × 90 × 13 | 58.9 | Highly irregular |
| Wire container | 70 × 70 × 65 | 32.6 | Slightly irregular |
| Paper cup | 60 × 70 | 3.1 | Regular |
| Beaker | 60 × 70 | 10.2 | Regular |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, M.; Han, Y.-J.; Han, M.-W. A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk. Polymers 2023, 15, 1126. https://doi.org/10.3390/polym15051126
Kang M, Han Y-J, Han M-W. A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk. Polymers. 2023; 15(5):1126. https://doi.org/10.3390/polym15051126
Chicago/Turabian StyleKang, Minchae, Ye-Ji Han, and Min-Woo Han. 2023. "A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk" Polymers 15, no. 5: 1126. https://doi.org/10.3390/polym15051126
APA StyleKang, M., Han, Y.-J., & Han, M.-W. (2023). A Shape Memory Alloy-Based Soft Actuator Mimicking an Elephant’s Trunk. Polymers, 15(5), 1126. https://doi.org/10.3390/polym15051126