
Closed-Loop Optimal Control of Greenhouse Cultivation Based on Two-Time-Scale Decomposition: A Simulation Study in Lhasa




Abstract
:1. Introduction
2. Materials and Methods
2.1. Greenhouse Climate—Lettuce Growth Mechanistic Model
2.2. Control Objective
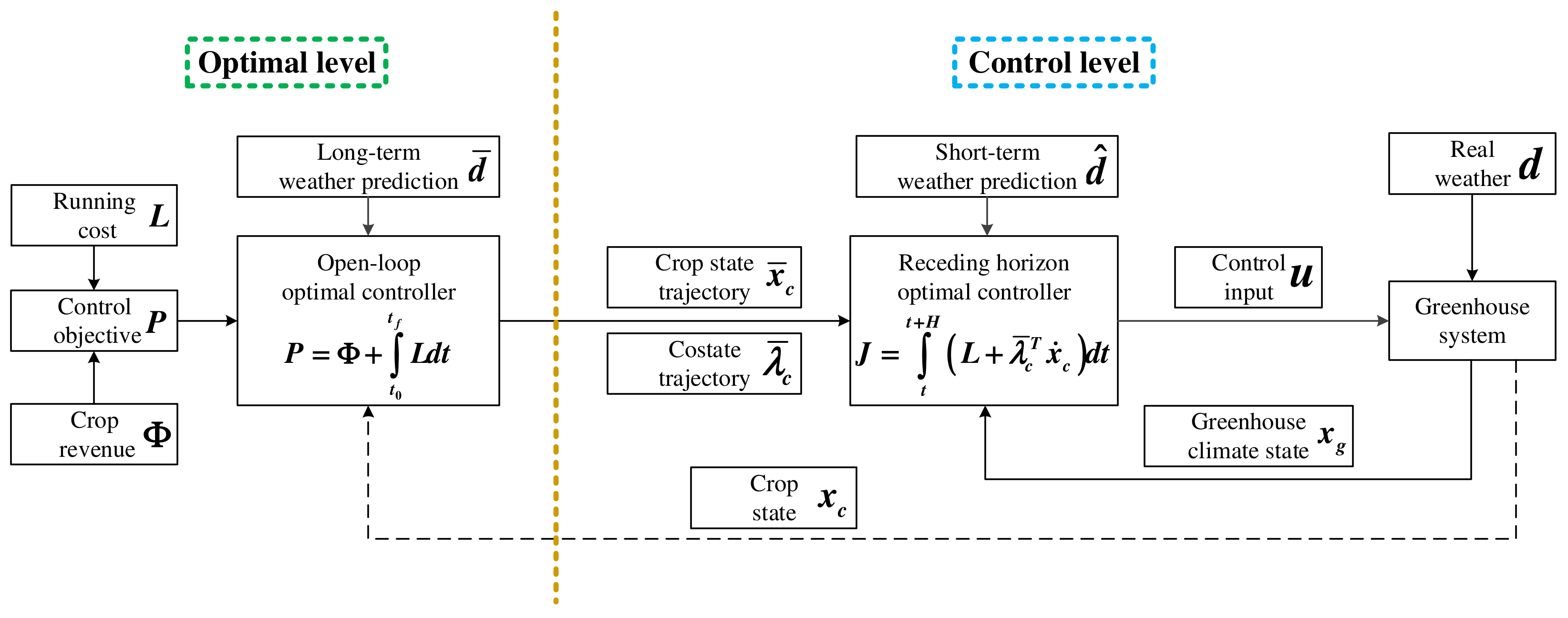
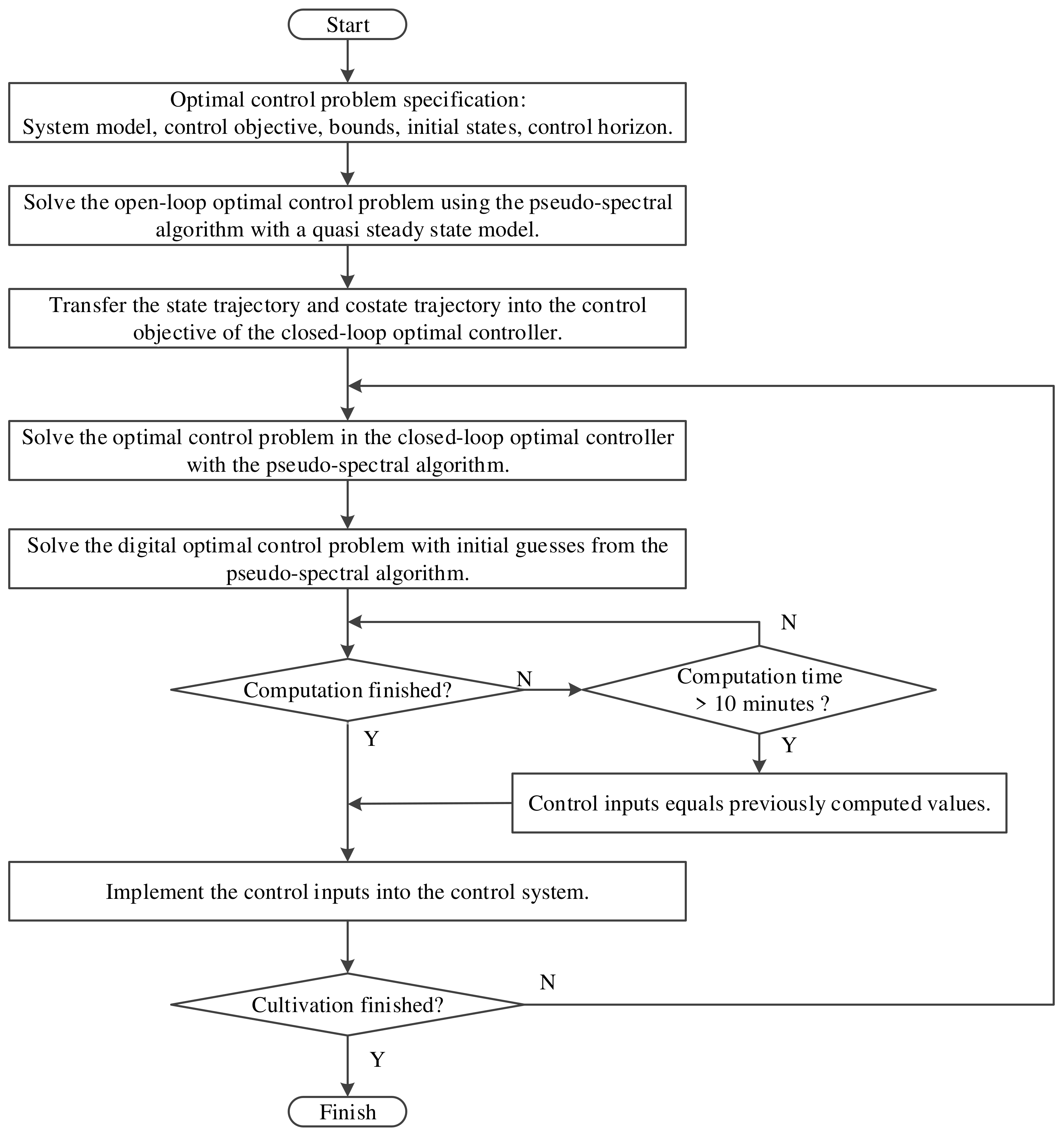
2.3. Control Algorithm
3. Results and Discussion
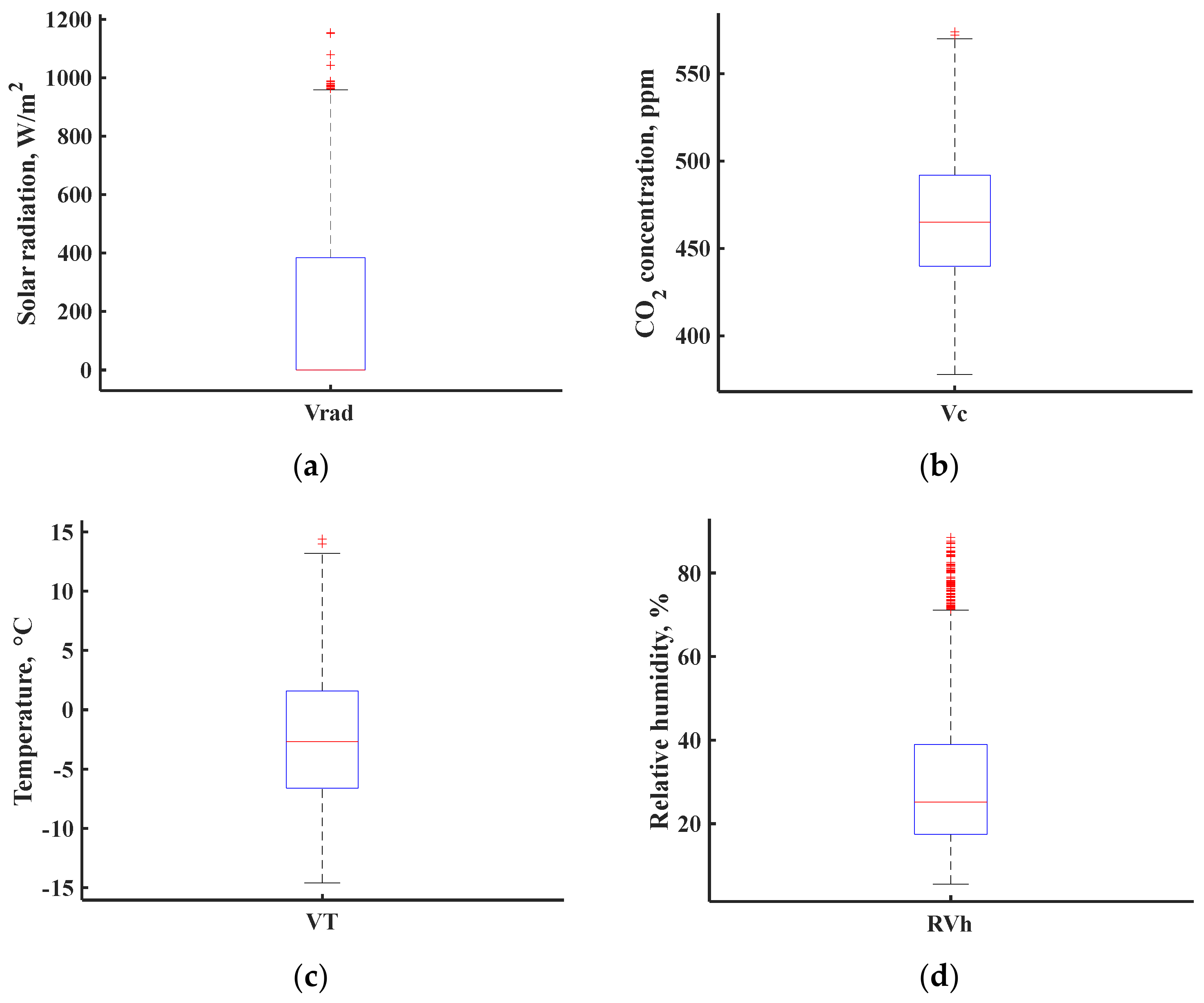
3.1. External Weather
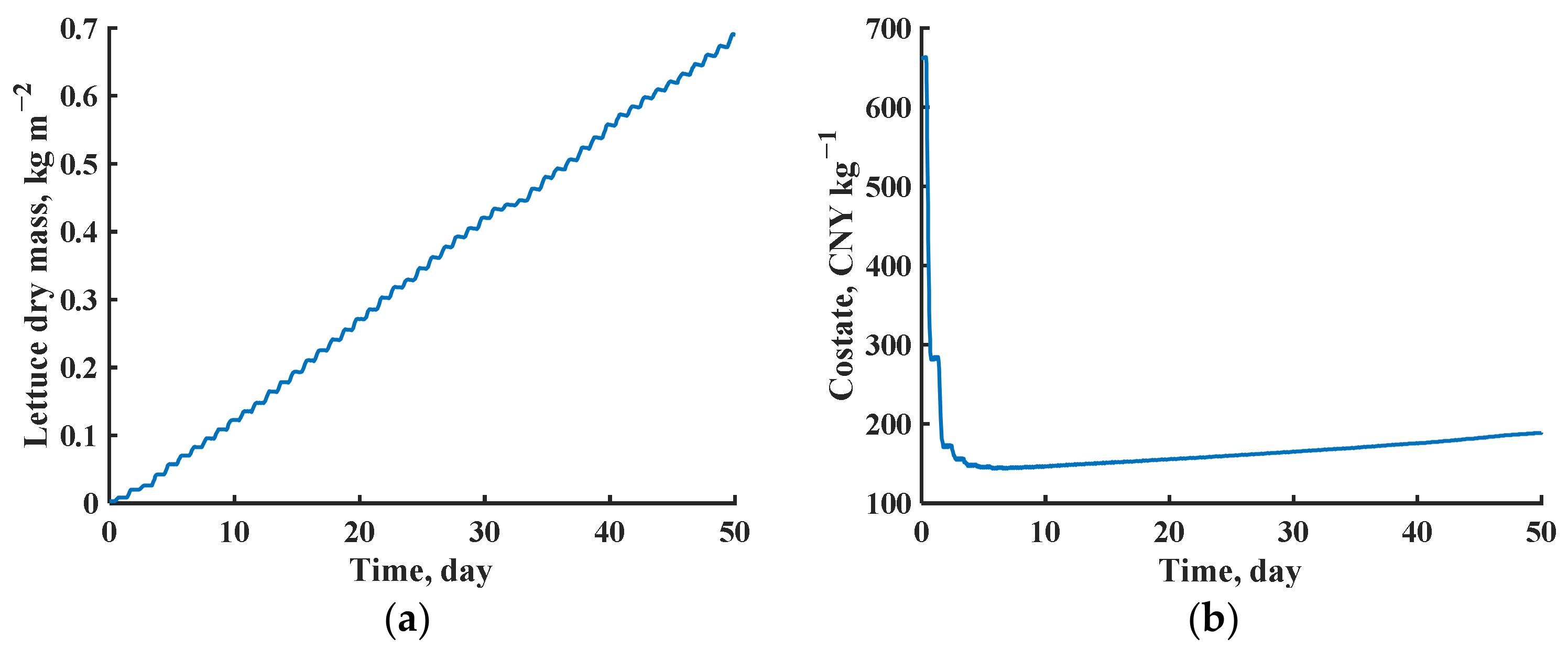
3.2. Open-Loop Simulations
3.3. Closed-Loop Simulations
3.4. Summary of Time
4. Conclusions
- Open-loop simulations of the optimal control of greenhouse lettuce cultivation in Lhasa generate yield and profit indicators of 14.49 kg m−2 and 13.72 CNY m−2, respectively. In closed-loop simulations, these indicators are corrected to 2.38 kg m−2 and 11.01 CNY m−2 lower, respectively, because of short-term weather prediction errors and a shorter sampling interval than that in the open-loop. When the computation time of the nonlinear dynamic programming is considered, further corrections in yield and profit indicators from closed-loop simulations can be up to 0.1 kg m−2 and 0.87 CNY m−2, respectively. These indicators are closer to real implementations and can help investors make wiser decisions before cultivation.
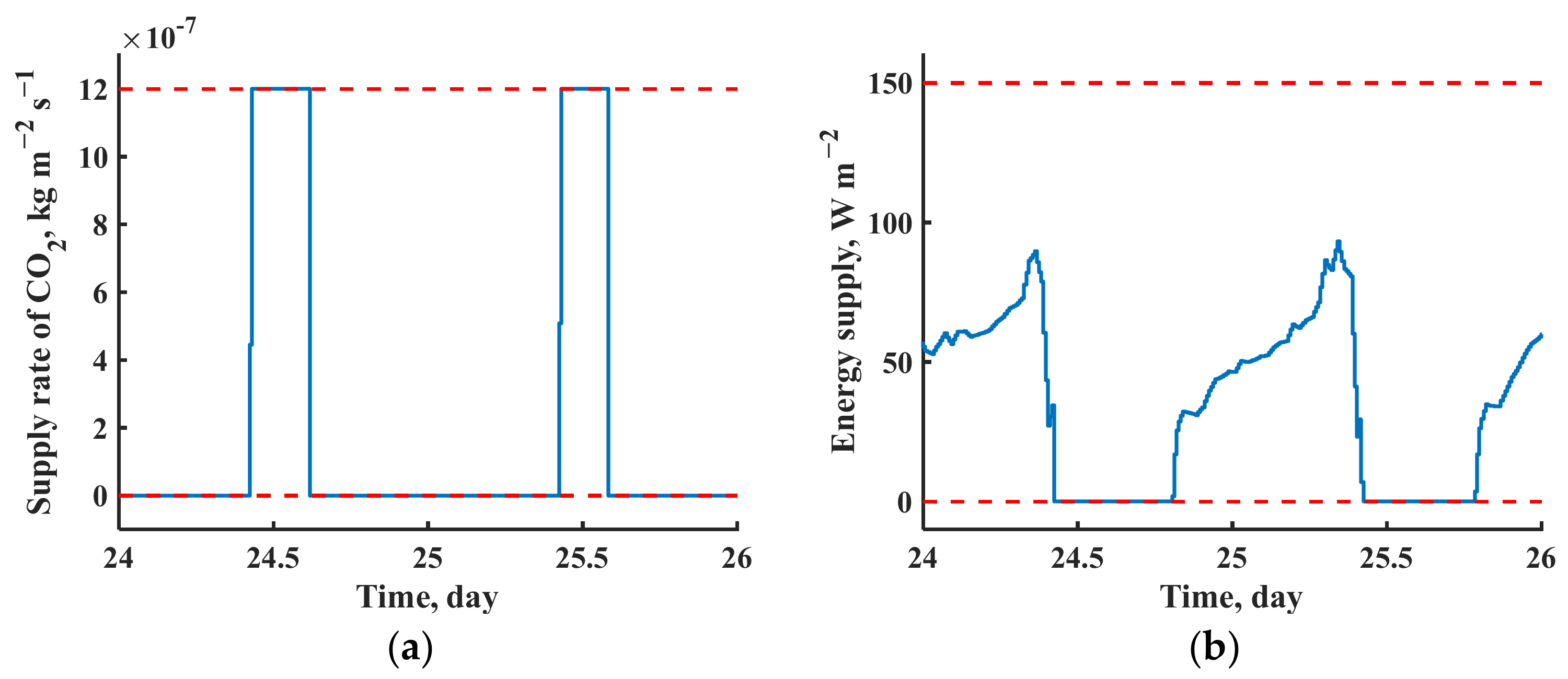
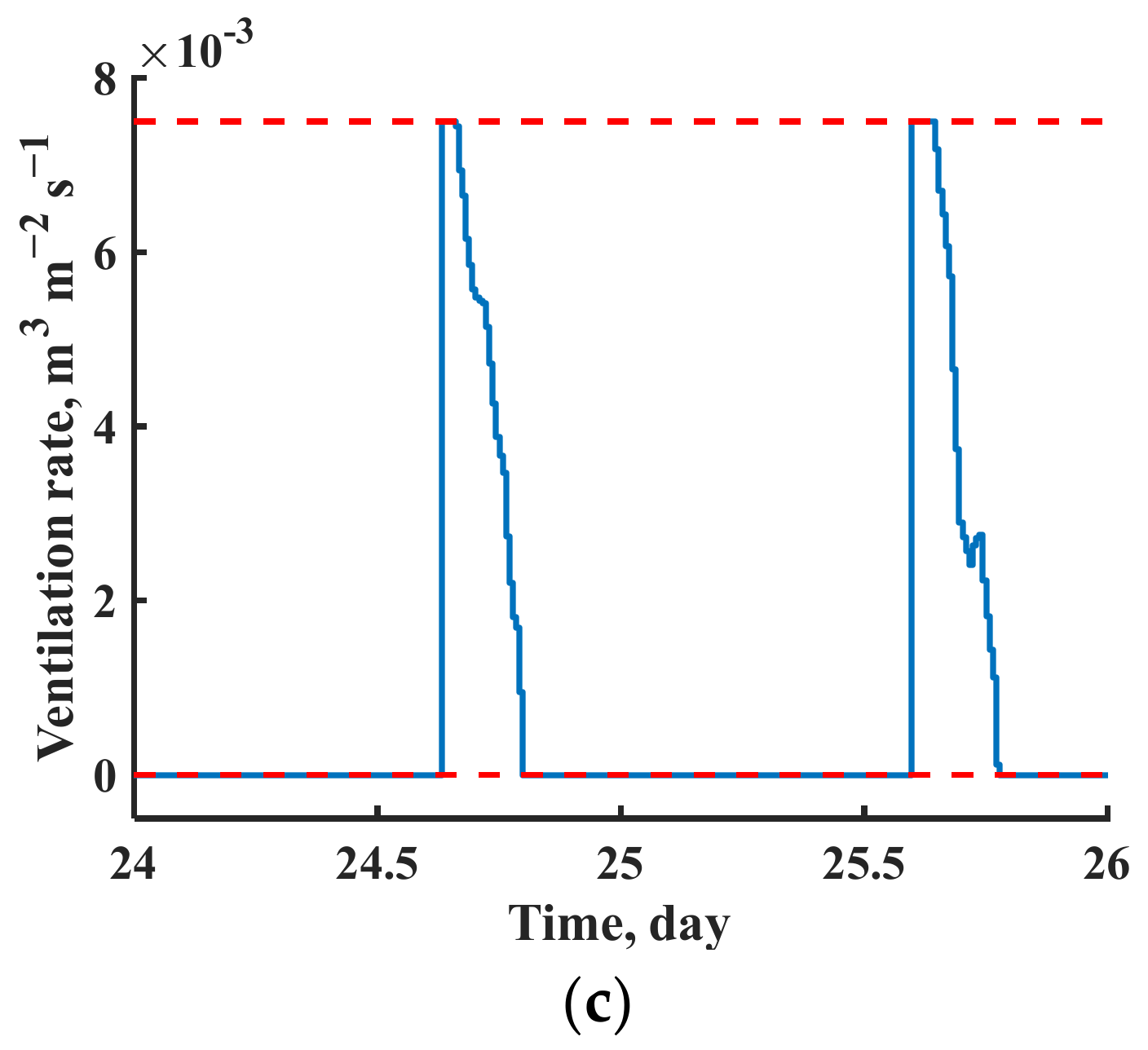
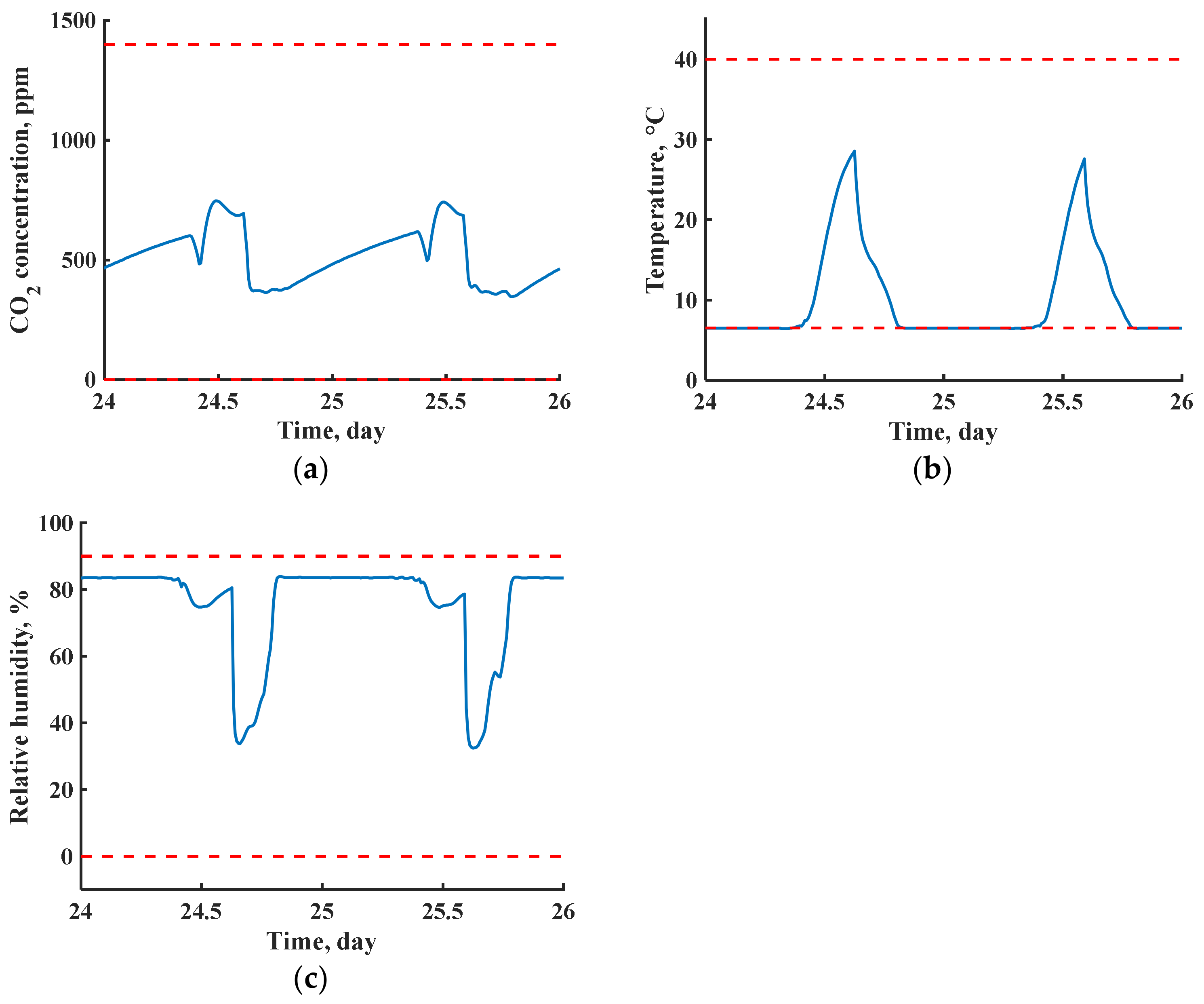
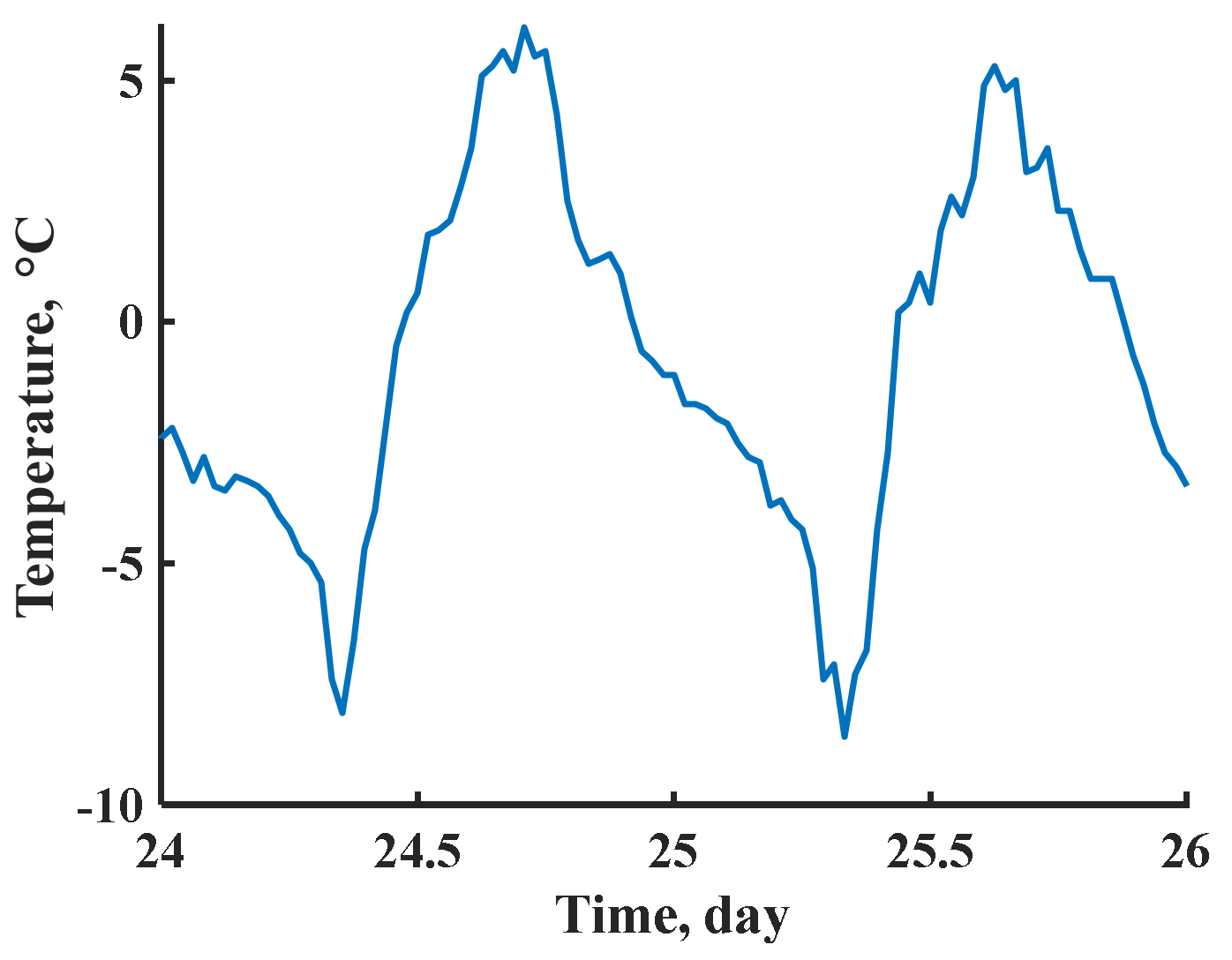
- Due to the low temperature and high solar radiation in Lhasa, a mix of simultaneous ventilation and CO2 supply occurs as a trade-off between costs associated with prices. As a result, the CO2 concentration is far from its upper bound although the CO2 supply is maximum at noon. Although the external temperature is low, ventilation is needed at noon for reducing the internal temperature because of the high solar radiation.
- The profit in optimal control of Venlo greenhouse lettuce cultivation can be as low as 1.84 CNY m−2 on the coldest days in Lhasa. However, if the abundant solar energy in Lhasa can be further exploited, such as with an active solar water wall, the profit can be increased to more than 49.30 CNY m−2. For future applications, low-cost solar-heating devices should be modelled and incorporated into the optimal control algorithm to increase profit and sustainability.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Van Straten, G.; Van Willigenburg, L.G.; Van Henten, E.J.; Van Ooteghem, R.J.C. Optimal Control of Greenhouse Cultivation; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Singhal, R.; Kumar, R.; Neeli, S. Receding horizon control based on prioritised multi-operational ranges for greenhouse environment regulation. Comput. Electron. Agric. 2021, 180, 105840. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Bontsema, J. Time-scale decomposition of an optimal control problem in greenhouse climate management. Control. Eng. Pract. 2009, 17, 88–96. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Q.; Wang, Y. Hierarchical optimization control based on crop growth model for greenhouse light environment. Comput. Electron. Agric. 2021, 180, 105854. [Google Scholar] [CrossRef]
- Kuijpers, W.J.; Antunes, D.J.; Van Mourik, S.; Van Henten, E.J.; Van De Molengraft, M.J. Weather forecast error modelling and performance analysis of automatic greenhouse climate control. Biosyst. Eng. 2022, 214, 207–229. [Google Scholar] [CrossRef]
- Katzin, D.; Van Henten, E.J.; Van Mourik, S. Process-based greenhouse climate models: Genealogy, current status, and future directions. Agric. Syst. 2022, 198, 103388. [Google Scholar] [CrossRef]
- Van Beveren, P.J.M.; Bontsema, J.; Van’t Ooster, A.; Van Straten, G.; Van Henten, E.J. Optimal utilization of energy equipment in a semi-closed greenhouse. Comput. Electron. Agric. 2020, 179, 105800. [Google Scholar] [CrossRef]
- Lin, D.; Zhang, L.; Xia, X. Model predictive control of a Venlo-type greenhouse system considering electrical energy, water and carbon dioxide consumption. Appl. Energy 2021, 298, 117163. [Google Scholar] [CrossRef]
- Seginer, I.; Van Straten, G.; Van Beveren, P.J.M. Day-to-night heat storage in greenhouses: 4. Changing the environmental bounds. Biosyst. Eng. 2020, 192, 90–107. [Google Scholar] [CrossRef]
- González, R.; Rodriguez, F.; Guzmán, J.L.; Berenguel, M. Robust constrained economic receding horizon control applied to the two time—Scale dynamics problem of a greenhouse. Optim. Control. Appl. Methods 2014, 35, 435–453. [Google Scholar] [CrossRef]
- Achour, Y.; Ouammi, A.; Zejli, D.; Sayadi, S. Supervisory model predictive control for optimal operation of a greenhouse indoor environment coping with food-energy-water Nexus. IEEE Access 2020, 8, 211562–211575. [Google Scholar] [CrossRef]
- Lin, D.; Zhang, L.; Xia, X. Hierarchical model predictive control of Venlo-type greenhouse climate for improving energy efficiency and reducing operating cost. J. Clean. Prod. 2020, 264, 121513. [Google Scholar] [CrossRef]
- Bersani, C.; Fossa, M.; Priarone, A.; Sacile, R.; Zero, E. Model Predictive Control versus Traditional Relay Control in a High Energy Efficiency Greenhouse. Energies 2021, 14, 3353. [Google Scholar] [CrossRef]
- Hu, G.; You, F. Model predictive control for greenhouse condition adjustment and crop production prediction. Comput. Aided Chem. Eng. 2022, 51, 1051–1056. [Google Scholar]
- Ren, Z.; Dong, Y.; Lin, D.; Zhang, L.; Fan, Y.; Xia, X. Managing energy-water-carbon-food nexus for cleaner agricultural greenhouse production: A control system approach. Sci. Total Environ. 2022, 848, 157756. [Google Scholar] [CrossRef]
- Chen, W.H.; Mattson, N.S.; You, F. Intelligent control and energy optimization in controlled environment agriculture via nonlinear model predictive control of semi-closed greenhouse. Appl. Energy 2022, 320, 119334. [Google Scholar] [CrossRef]
- Su, Y.; Xu, L.; Goodman, E.D. Multi-layer hierarchical optimisation of greenhouse climate setpoints for energy conservation and improvement of crop yield. Biosyst. Eng. 2021, 205, 212–233. [Google Scholar] [CrossRef]
- Tap, R.F. Economics-Based Optimal Control of Greenhouse Tomato Crop Production. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2000. [Google Scholar]
- Xu, D.; Du, S.; Van Willigenburg, L.G. Optimal control of Chinese solar greenhouse cultivation. Biosyst. Eng. 2018, 171, 205–219. [Google Scholar] [CrossRef]
- Xu, D.; Du, S.; Van Willigenburg, L.G. Double closed-loop optimal control of greenhouse cultivation. Control. Eng. Pract. 2019, 85, 90–99. [Google Scholar] [CrossRef]
- Li, E.; Zhu, J. Parametric analysis of the mechanism of creating indoor thermal environment in traditional houses in Lhasa. Build. Environ. 2022, 207, 108510. [Google Scholar] [CrossRef]
- Ioslovich, I.; Gutman, P.O.; Linker, R. Hamilton–Jacobi–Bellman formalism for optimal climate control of greenhouse crop. Automatica 2009, 45, 1227–1231. [Google Scholar] [CrossRef]
- Righini, I.; Vanthoor, B.; Verheul, M.J.; Naseer, M.; Maessen, H.; Persson, T.; Stanghellini, C. A greenhouse climate-yield model focussing on additional light, heat harvesting and its validation. Biosyst. Eng. 2020, 194, 1–15. [Google Scholar] [CrossRef]
- Van Henten, E.J. Greenhouse Climate Management: An Optimal Control Approach. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 1994. [Google Scholar]
- Van Ooteghem, R.J.C. Optimal Control Design for a Solar Greenhouse. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2007. [Google Scholar]
- Vanthoor, B.H.E. A Model-Based Greenhouse Design Method. Ph.D. Thesis, Wageningen University, Wageningen, The Netherlands, 2011. [Google Scholar]
- Van Henten, E.J. Sensitivity analysis of an optimal control problem in greenhouse climate management. Biosyst. Eng. 2003, 85, 355–364. [Google Scholar] [CrossRef]
- Xu, D.; Du, S.; Van Willigenburg, L.G. Adaptive two time-scale receding horizon optimal control for greenhouse lettuce cultivation. Comput. Electron. Agric. 2018, 146, 93–103. [Google Scholar] [CrossRef]
- Rutquist, P.E.; Edvall, M.M. Propt-Matlab Optimal Control Software; Tomlab Optimization Inc.: Washington, DC, USA, 2010. [Google Scholar]
- Van Willigenburg, L.G.; Van Henten, E.J.; Van Meurs, W.T.M. Three time-scale digital optimal receding horizon control of the climate in a greenhouse with a heat storage tank. IFAC Proc. Vol. 2000, 33, 149–154. [Google Scholar] [CrossRef]
- Xu, D.; Ahmed, H.A.; Tong, Y.; Yang, Q.; Van Willigenburg, L.G. Optimal control as a tool to investigate the profitability of a Chinese plant factory—Lettuce production system. Biosyst. Eng. 2021, 208, 319–332. [Google Scholar] [CrossRef]
- Van Beveren, P.J.M.; Bontsema, J.; Van Straten, G.; Van Henten, E.J. Optimal control of greenhouse climate using minimal energy and grower defined bounds. Appl. Energy 2015, 159, 509–519. [Google Scholar] [CrossRef]
- Xu, W.; Song, W.; Ma, C. Performance of a water-circulating solar heat collection and release system for greenhouse heating using an indoor collector constructed of hollow polycarbonate sheets. J. Clean. Prod. 2020, 253, 119918. [Google Scholar] [CrossRef]
- Xu, W.; Guo, H.; Ma, C. An active solar water wall for passive solar greenhouse heating. Appl. Energy 2022, 308, 118270. [Google Scholar] [CrossRef]
- Wang, J.; Qu, M.; Zhao, S.; Ma, C.; Song, W. New insights into the scientific configuration of a sheet heating system applied in Chinese solar greenhouse. Appl. Therm. Eng. 2023, 219, 119448. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Physical Meaning | Unit |
|---|---|---|
| Lettuce dry mass | Kg [DM] m−2 | |
| Internal CO2 concentration | kg m−3 | |
| Internal temperature | °C | |
| Internal humidity | kg m−3 | |
| CO2 supply rate | kg m−2 s−1 | |
| Heating rate | W m−2 | |
| Ventilation rate | m3 m−2 s−1 | |
| External solar radiation | W m−2 | |
| External CO2 concentration | kg m−3 | |
| External temperature | °C | |
| External humidity | kg m−3 |
| Bound | |||
|---|---|---|---|
| Upper bound | 1.2 × 10−6 | 150 | 7.5 × 10−3 |
| Lower bound | 0 | 0 | 0 |
| Bound | |||
|---|---|---|---|
| Upper bound | 1400 | 40 | 90 |
| Lower bound | 0 | 6.5 | 0 |
| Control Pattern | Yield (kg [FW] m−2) | Crop Revenue (CNY m−2) | CO2 (kg m−2) | CO2 Cost (CNY m−2) | Energy (kWh m−2) | Energy Cost (CNY m−2) | Profit (CNY m−2) |
|---|---|---|---|---|---|---|---|
| RHOC | 12.11 | 109.03 | 0.74 | 12.54 | 53.60 | 93.78 | 2.71 |
| RHOCt | 12.01 | 108.13 | 0.74 | 12.50 | 53.61 | 93.79 | 1.84 |
| Time Type | Duration |
|---|---|
| Growing period | 50 days |
| Sampling interval of weather data in open-loop simulations | 2 h |
| Prediction horizon of lazy-man weather prediction | 1 h |
| Control horizon in closed-loop simulations | 1 h |
| Sampling interval of controls in closed-loop simulations | 20 min |
| Update interval of the control inputs | 10 min |
| Sampling interval of weather data in closed-loop simulations | 10 min |
| Longest computation time in closed-loop simulations | 32 s |
| Average computation time in closed-loop simulations | 11 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Li, Y.; Dai, A.; Zhao, S.; Song, W. Closed-Loop Optimal Control of Greenhouse Cultivation Based on Two-Time-Scale Decomposition: A Simulation Study in Lhasa. Agronomy 2023, 13, 102. https://doi.org/10.3390/agronomy13010102
Xu D, Li Y, Dai A, Zhao S, Song W. Closed-Loop Optimal Control of Greenhouse Cultivation Based on Two-Time-Scale Decomposition: A Simulation Study in Lhasa. Agronomy. 2023; 13(1):102. https://doi.org/10.3390/agronomy13010102
Chicago/Turabian StyleXu, Dan, Yanfeng Li, Anguo Dai, Shumei Zhao, and Weitang Song. 2023. "Closed-Loop Optimal Control of Greenhouse Cultivation Based on Two-Time-Scale Decomposition: A Simulation Study in Lhasa" Agronomy 13, no. 1: 102. https://doi.org/10.3390/agronomy13010102
APA StyleXu, D., Li, Y., Dai, A., Zhao, S., & Song, W. (2023). Closed-Loop Optimal Control of Greenhouse Cultivation Based on Two-Time-Scale Decomposition: A Simulation Study in Lhasa. Agronomy, 13(1), 102. https://doi.org/10.3390/agronomy13010102