
Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model

 ,
,  ,
,  , ,
, , 

Abstract
:1. Introduction
2. Materials and Methods
2.1. Ocean Model
2.1.1. Model Characteristics and Forcing
2.1.2. Eddy Tracking
2.2. Acoustic Model
2.2.1. Bellhop Model
2.2.2. Sound Speed Feature
2.2.3. Methodology Used to Calculate the Acoustic Impact of Meddies
3. Results
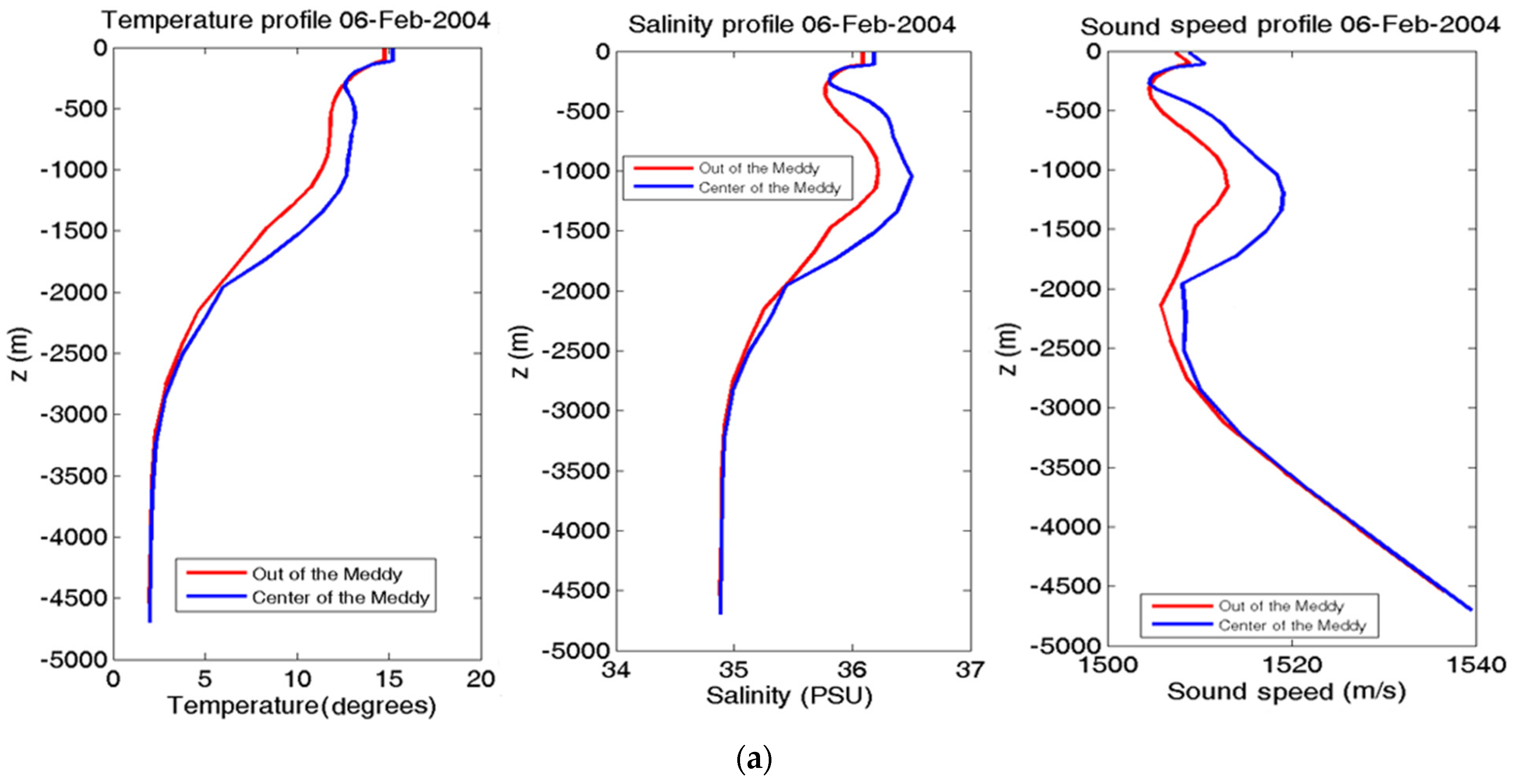
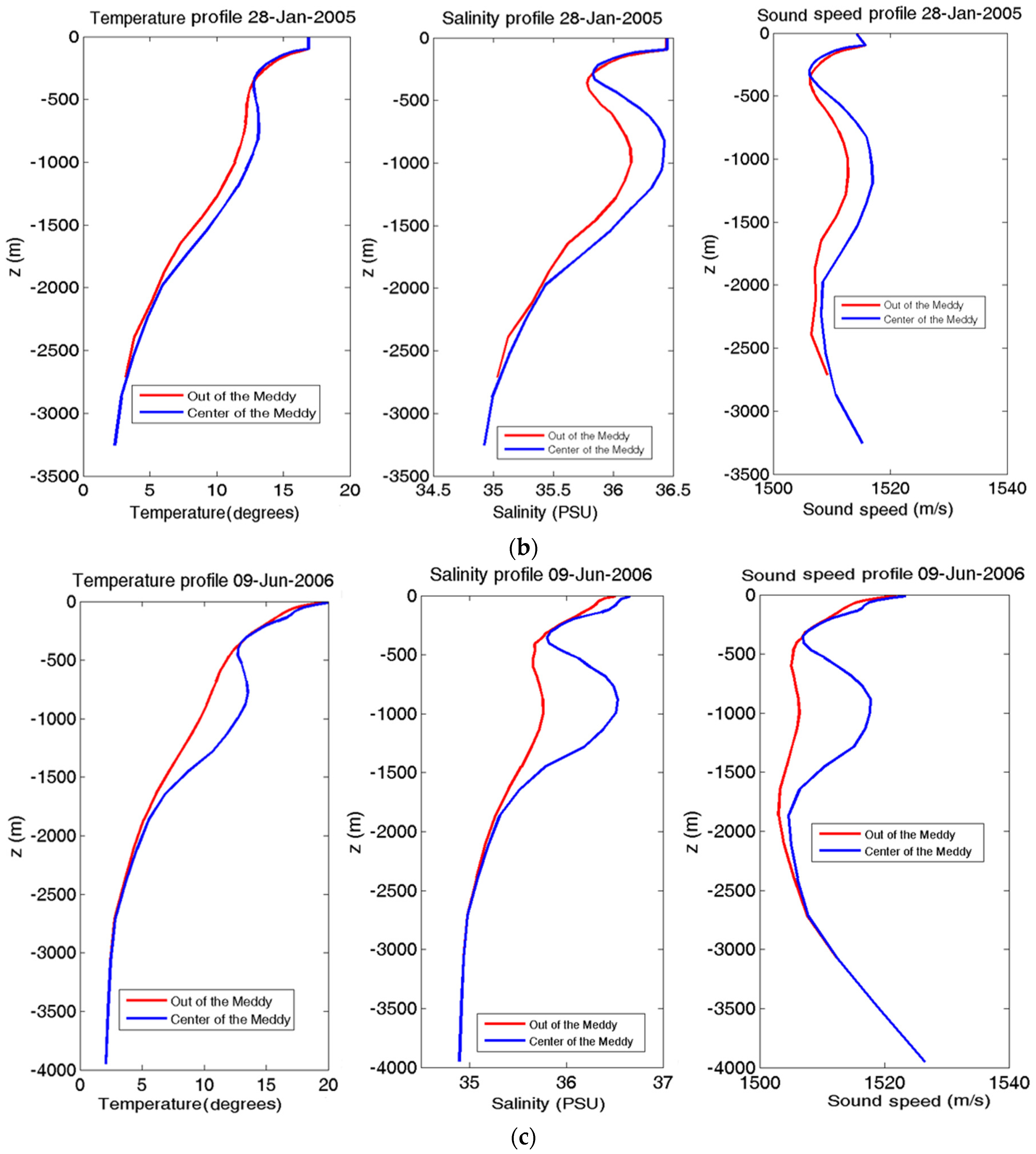
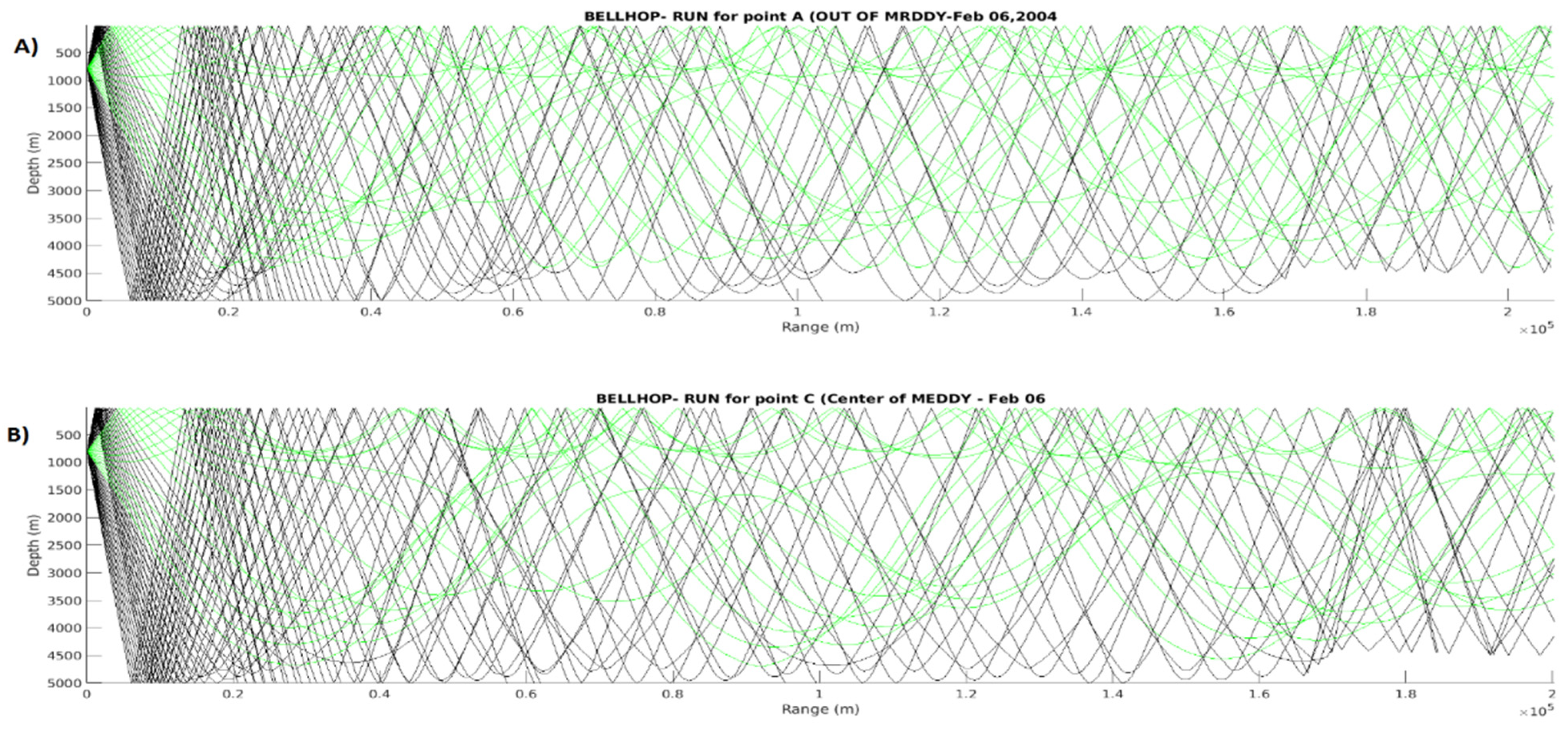
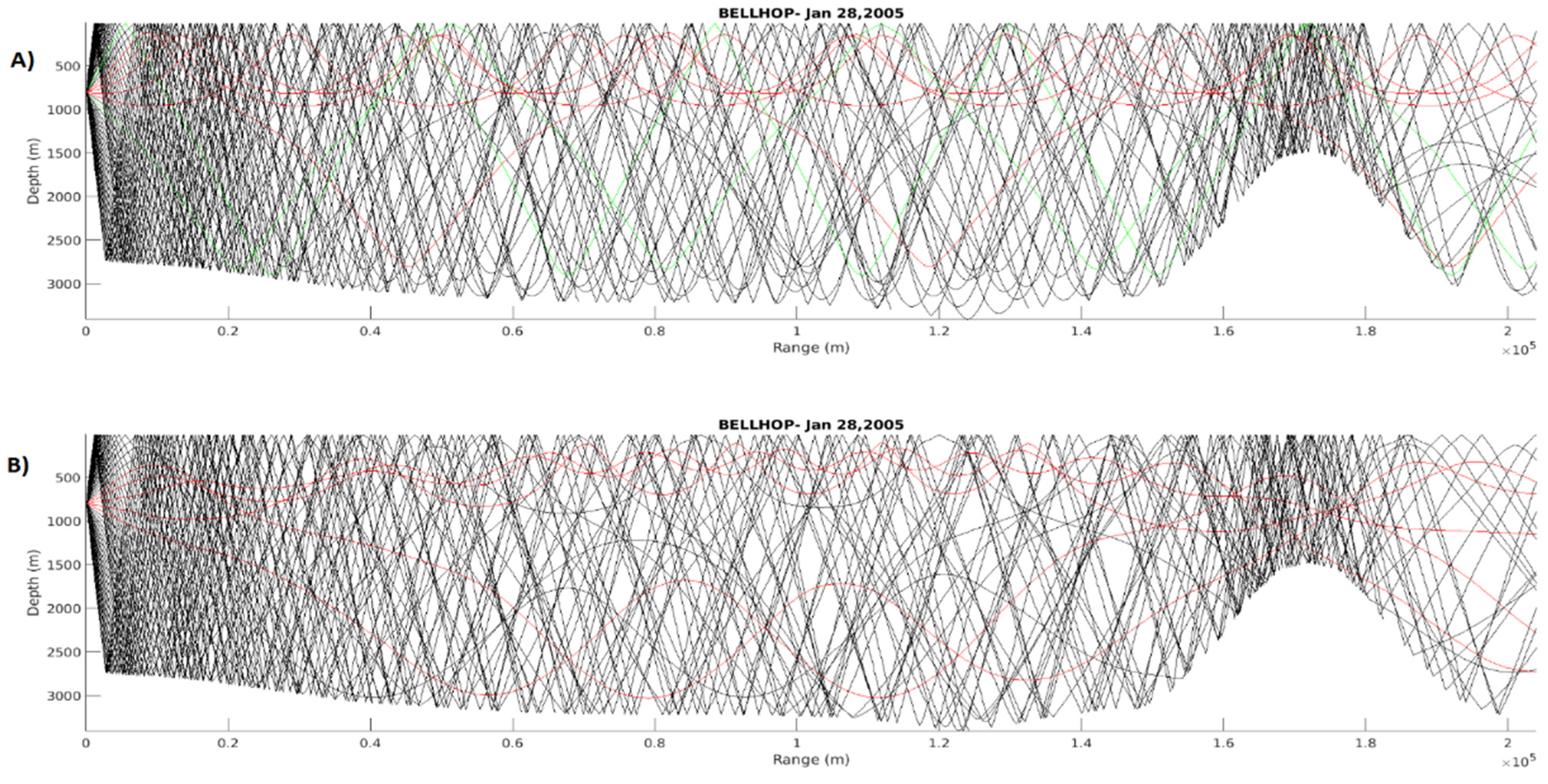
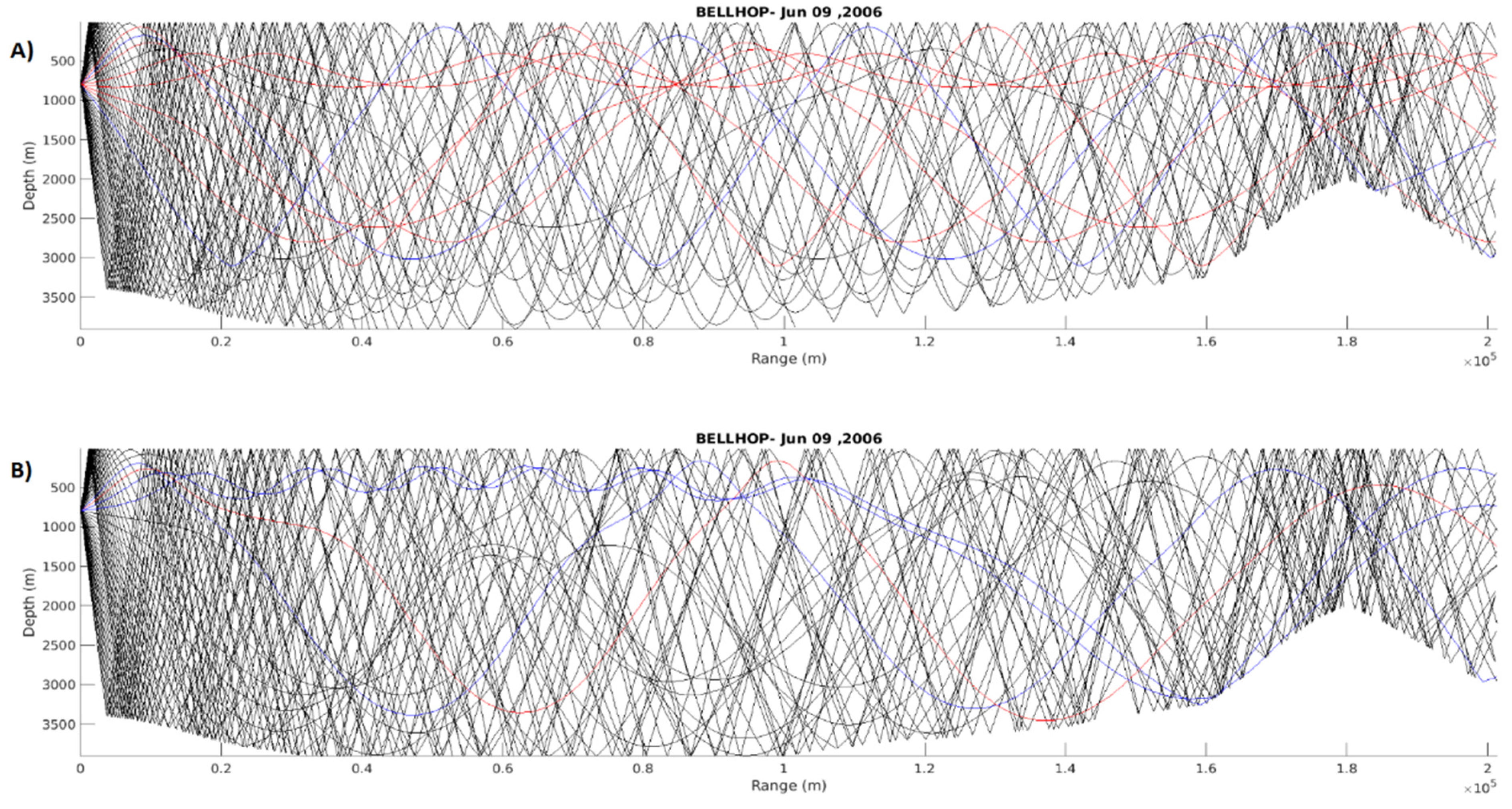
3.1. The Reference Case (Meddy 33)
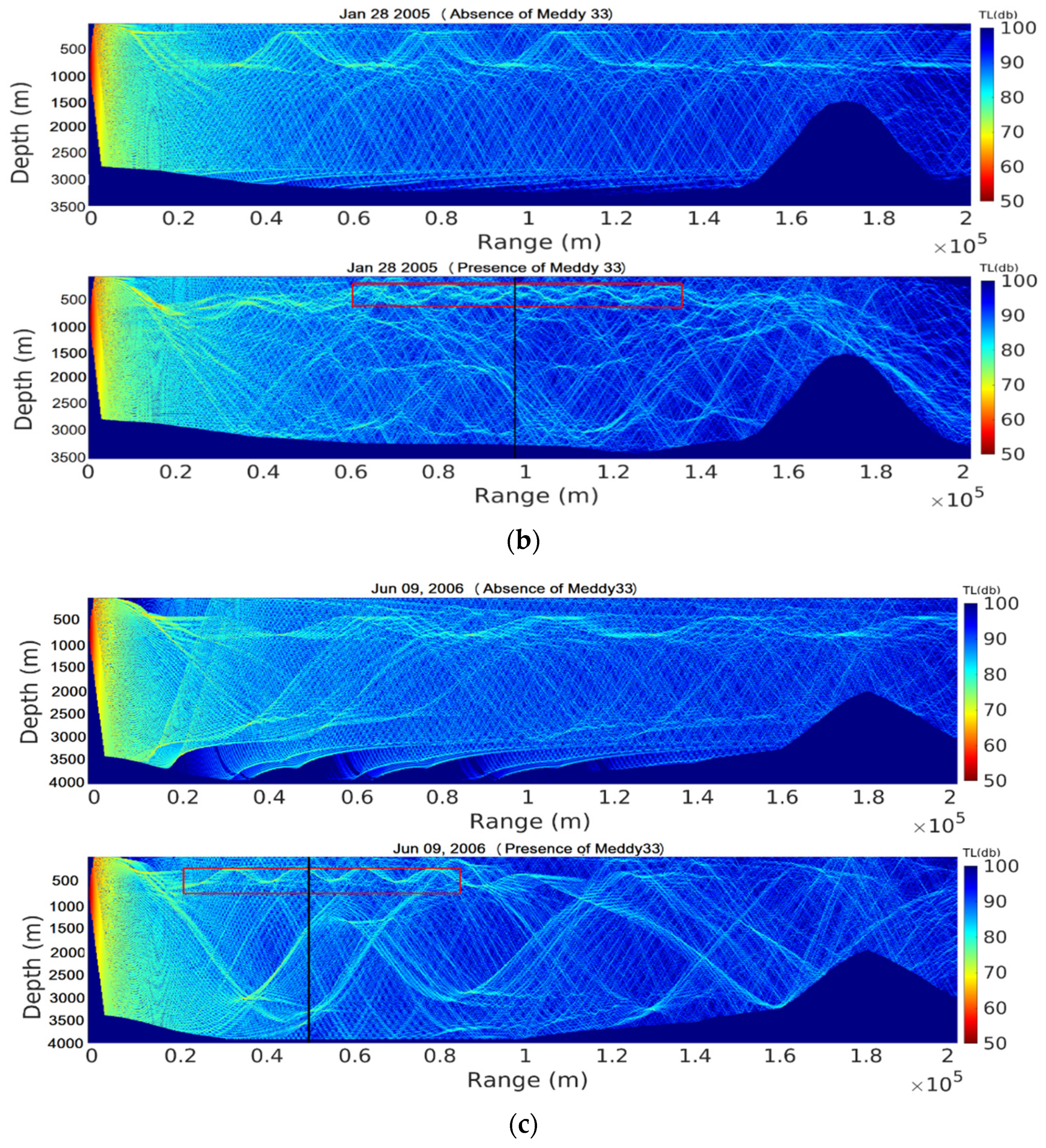
3.1.1. Sound Propagation and Transmission Loss (Vertical Sections)
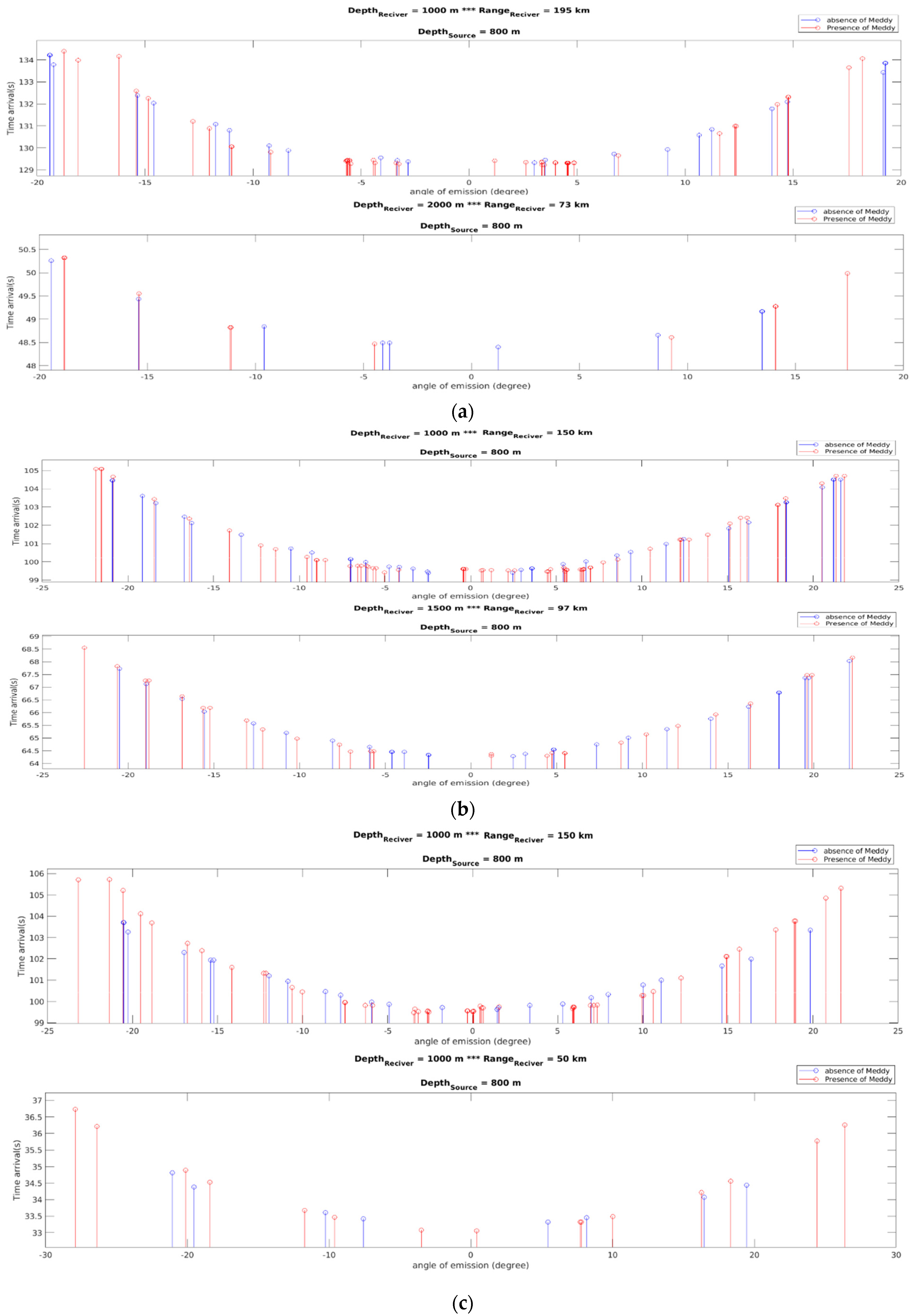
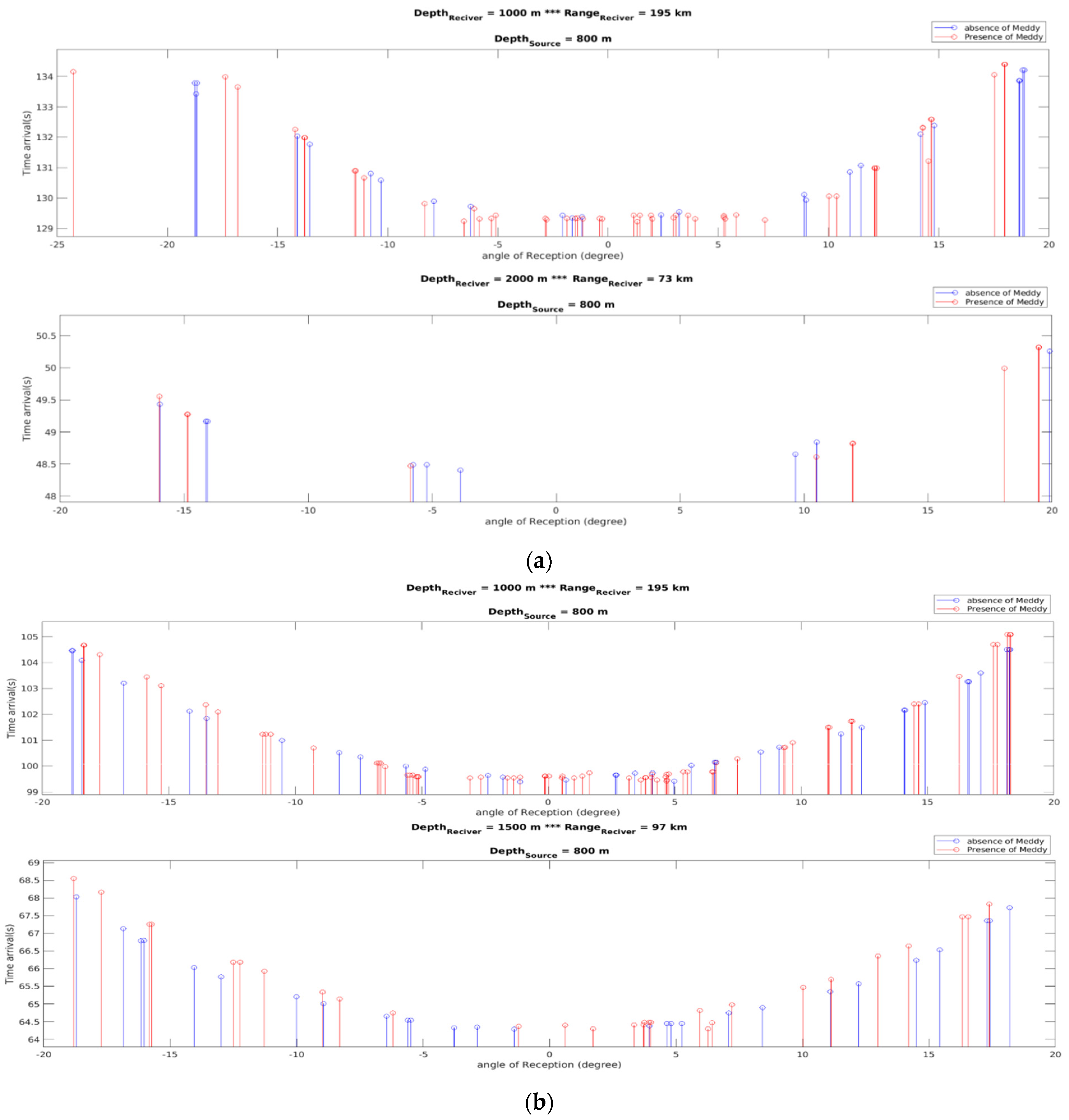
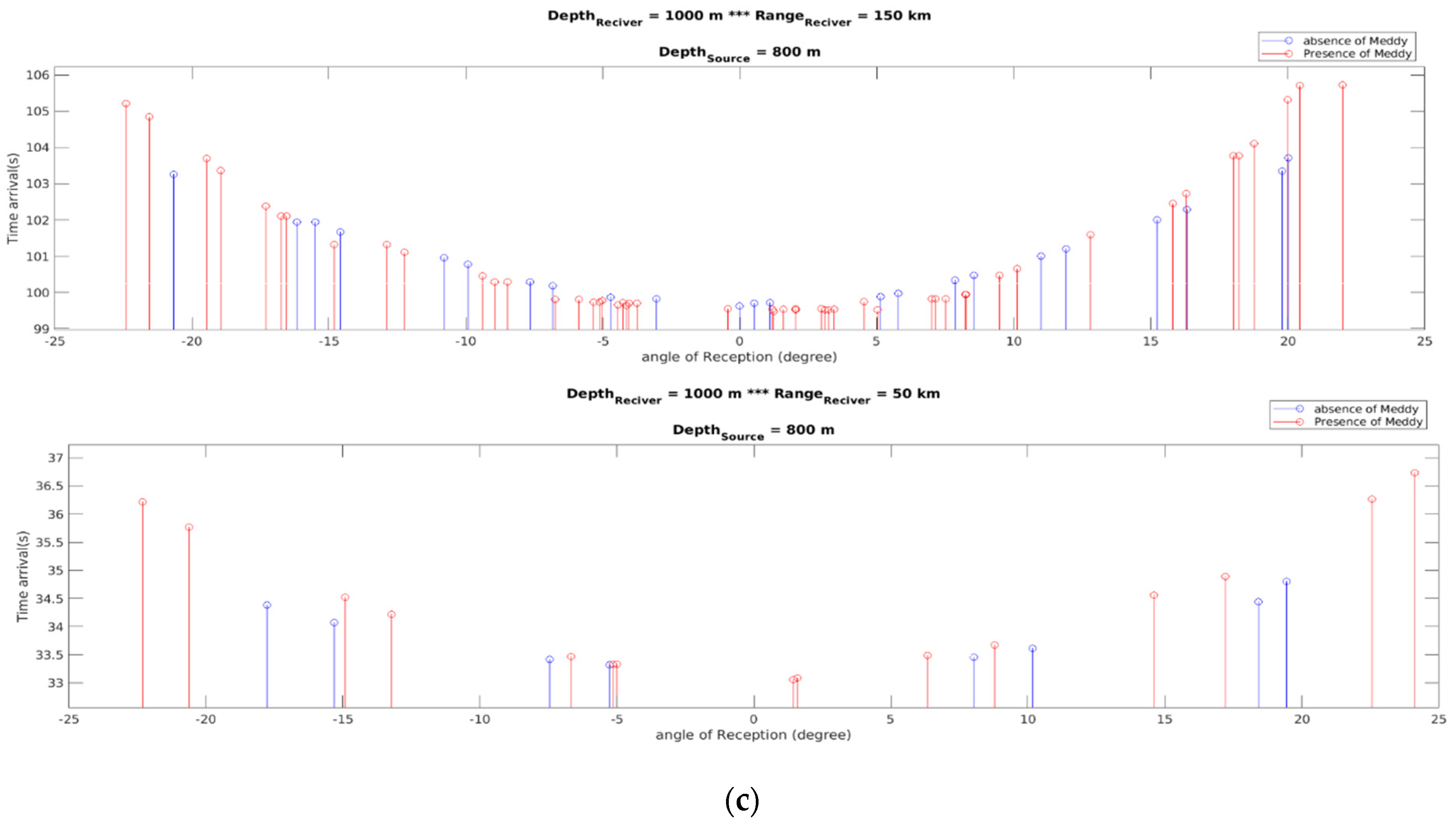
3.1.2. Number and Time of Arrival of Sound Signals at Different Receivers
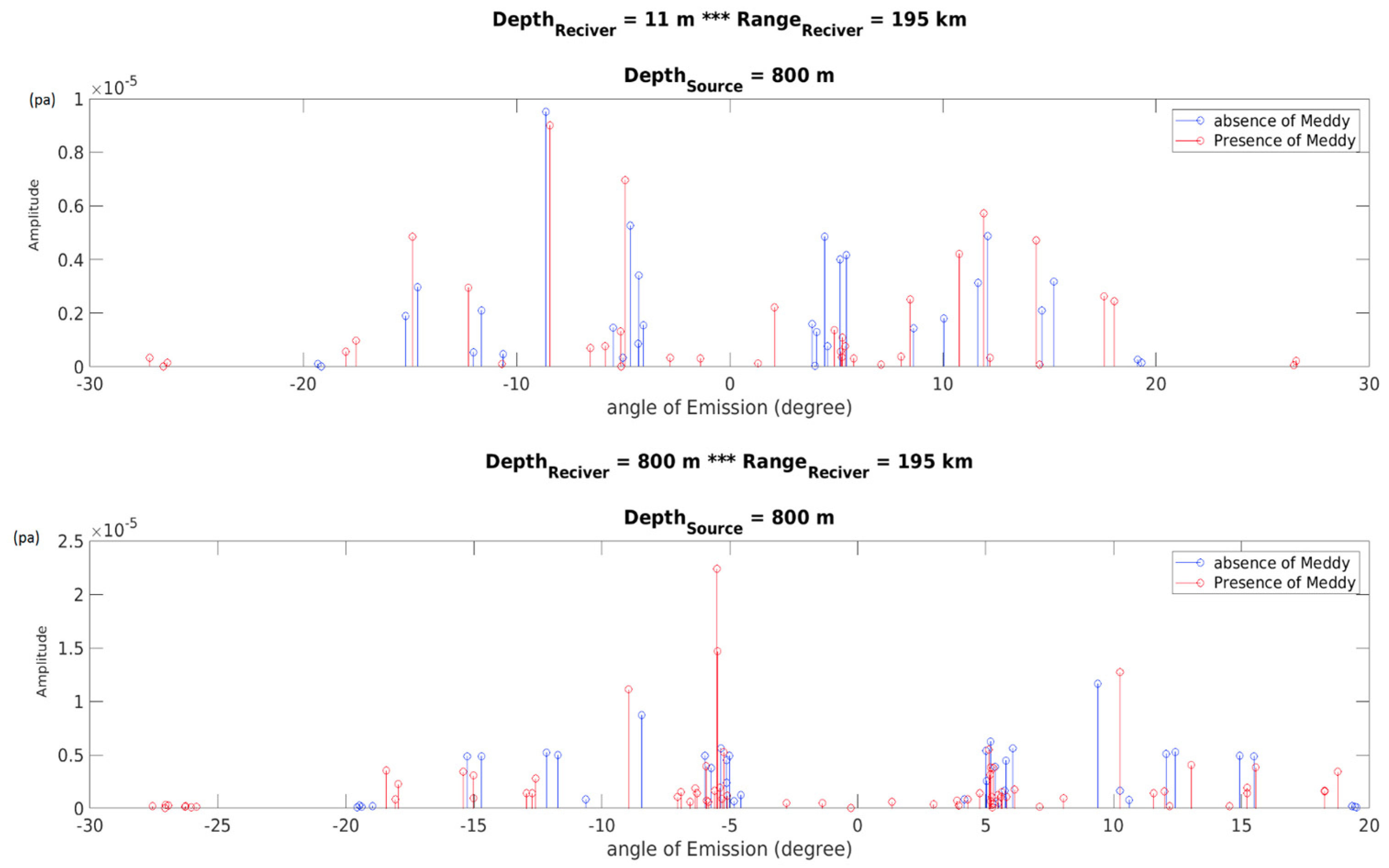
3.1.3. The Pressure Amplitude of Sound Signals at Various Receivers
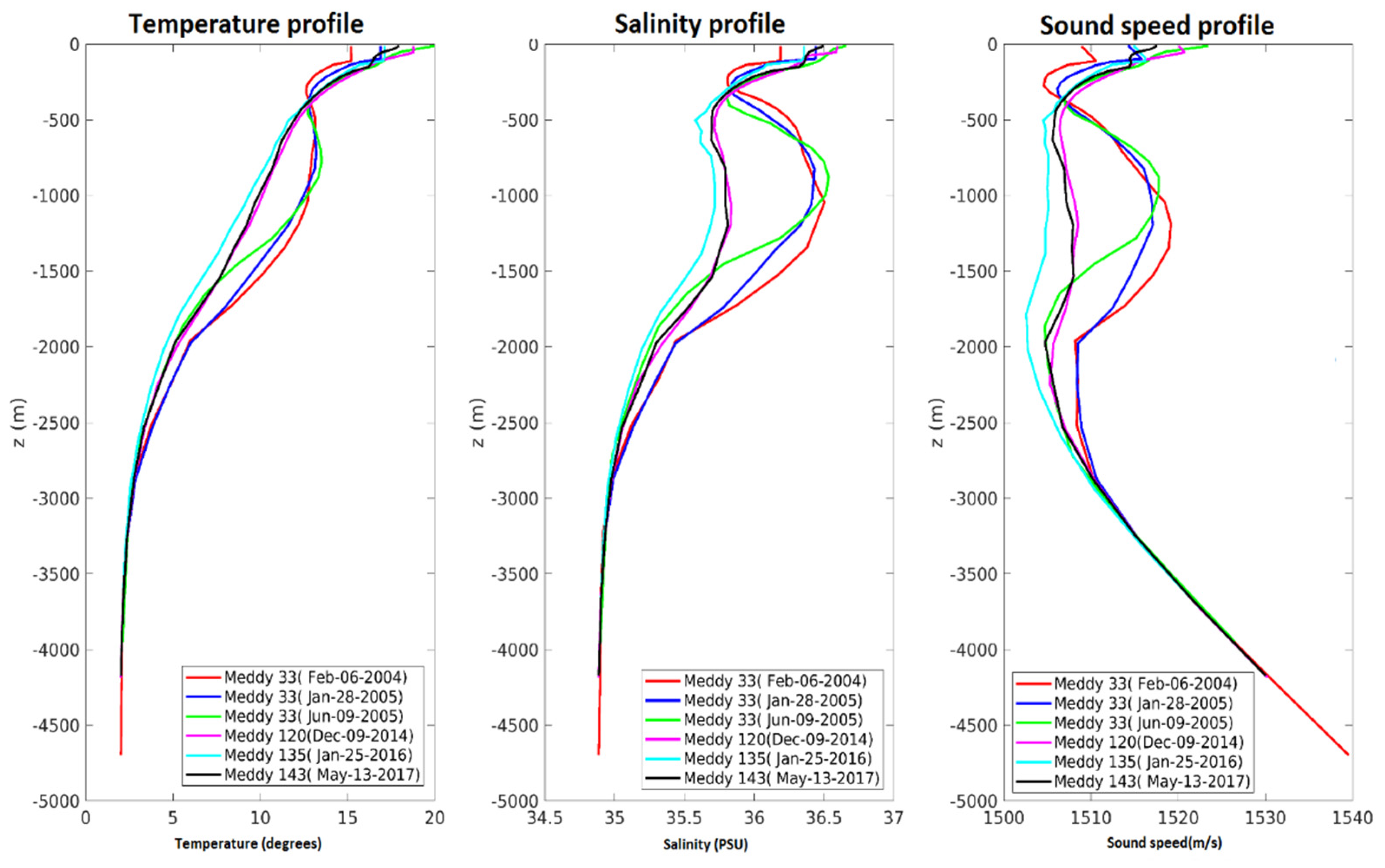
3.2. Acoustic Impact of the Other Meddies
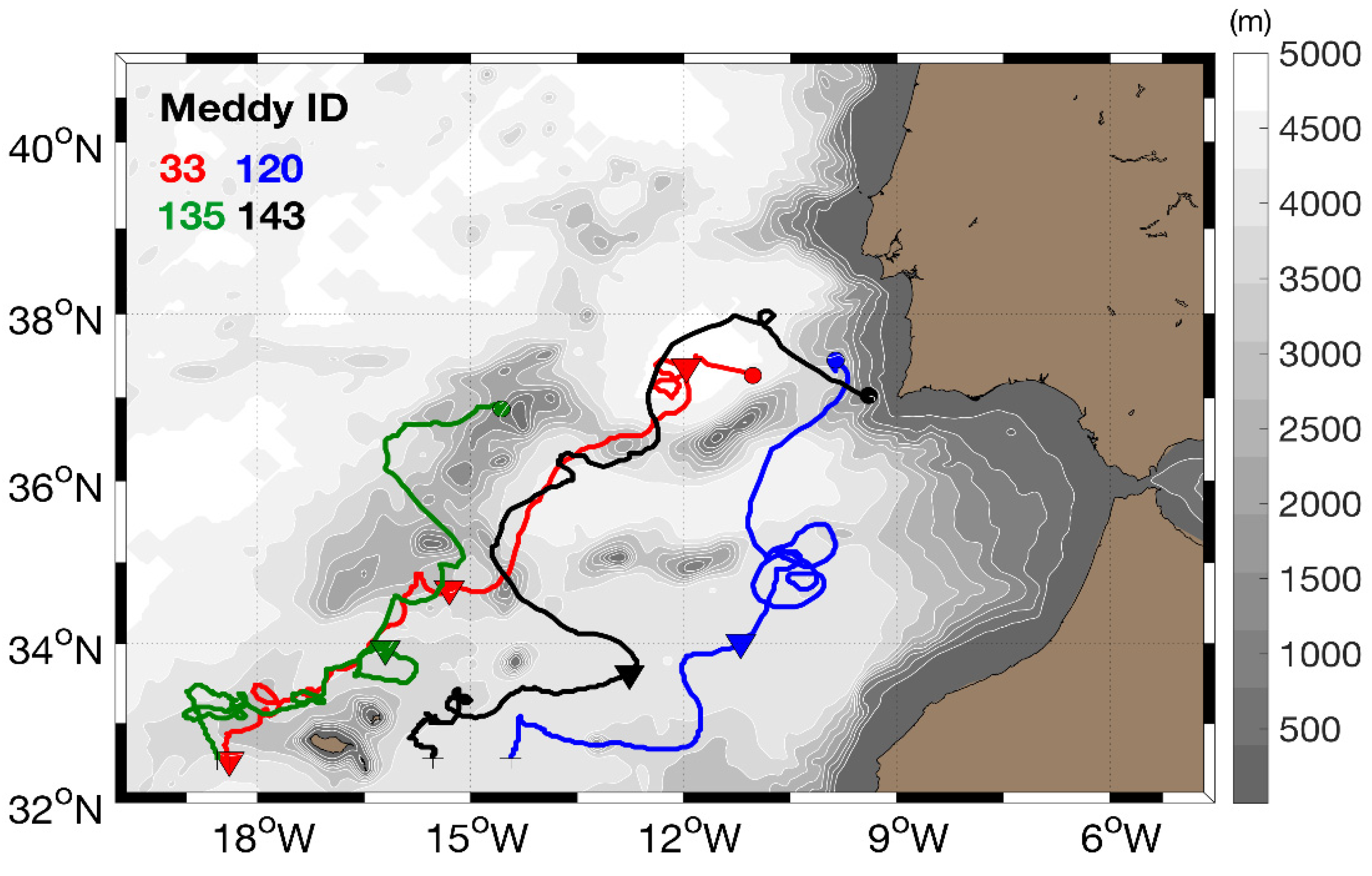
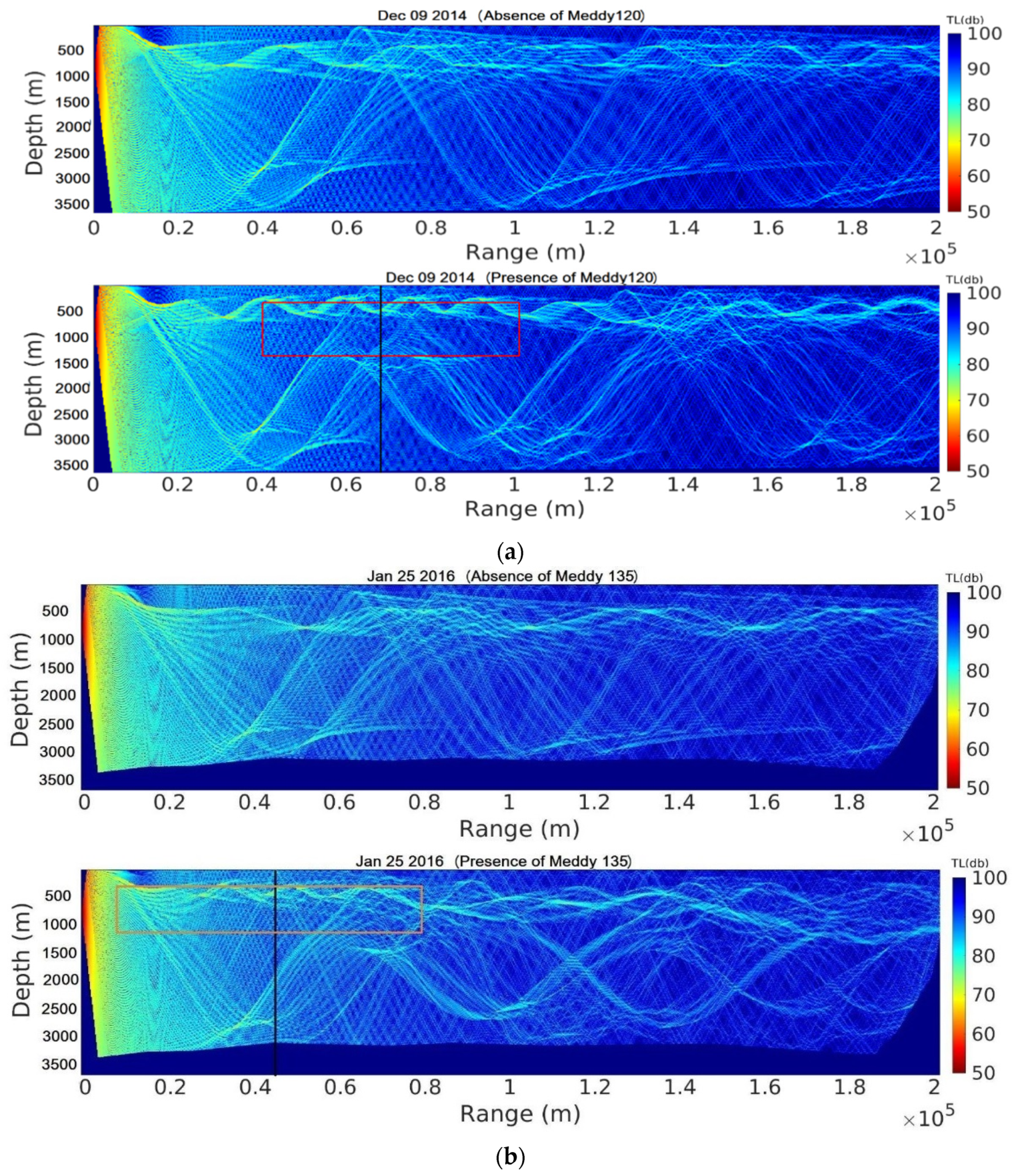
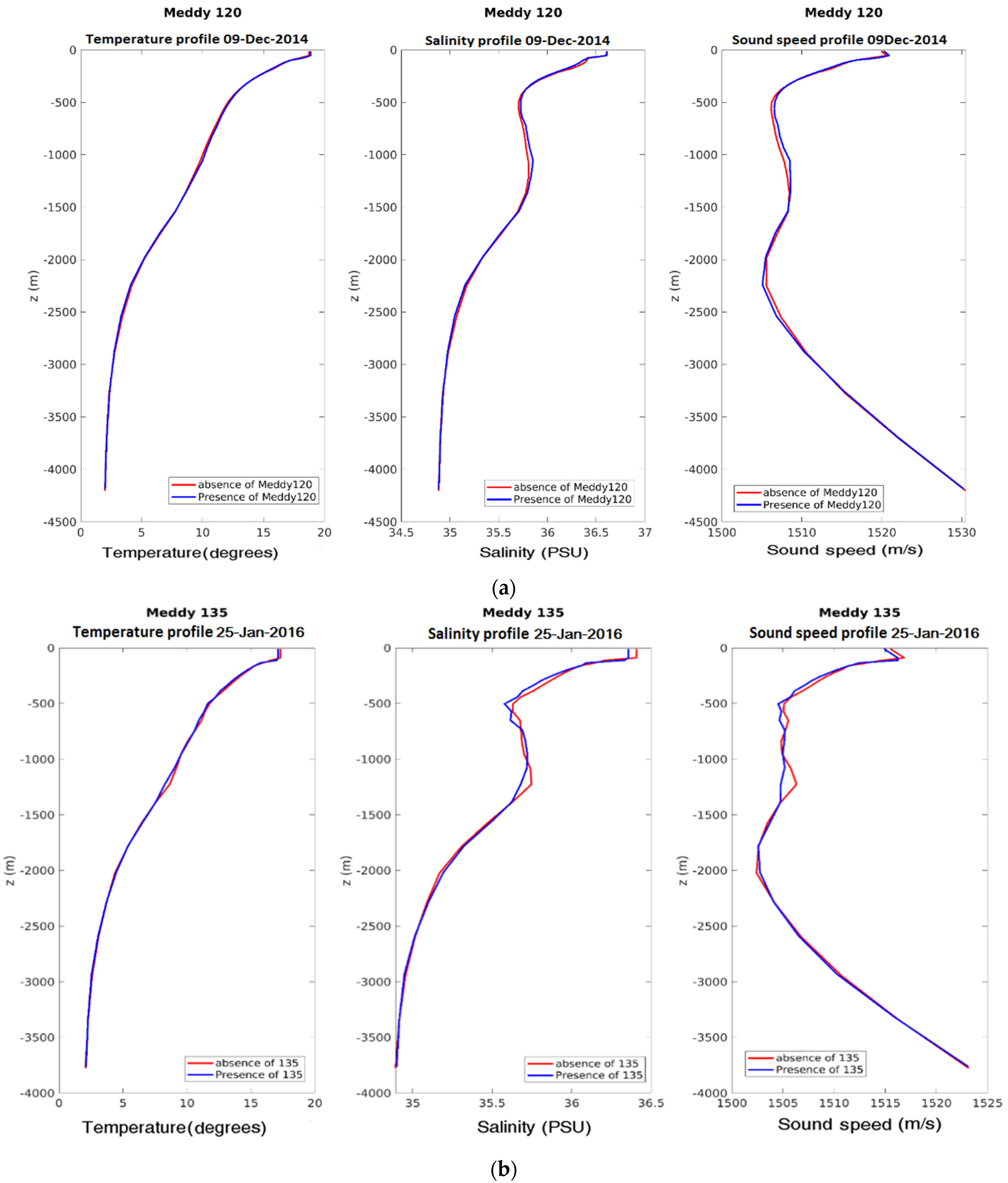
- The case of Meddy 120: this Meddy was tracked for 27 months and was first detected on 27 July 2013. Its radius and swirl velocity ranged from 10 to 35 km and 16 to 29 cm/s;
- The case of Meddy 135: this Meddy was tracked for 34 months and was first detected on 16 March 2013. Its radius and swirl velocity ranged from 18 to 43 km and 14 to 33 cm/s;
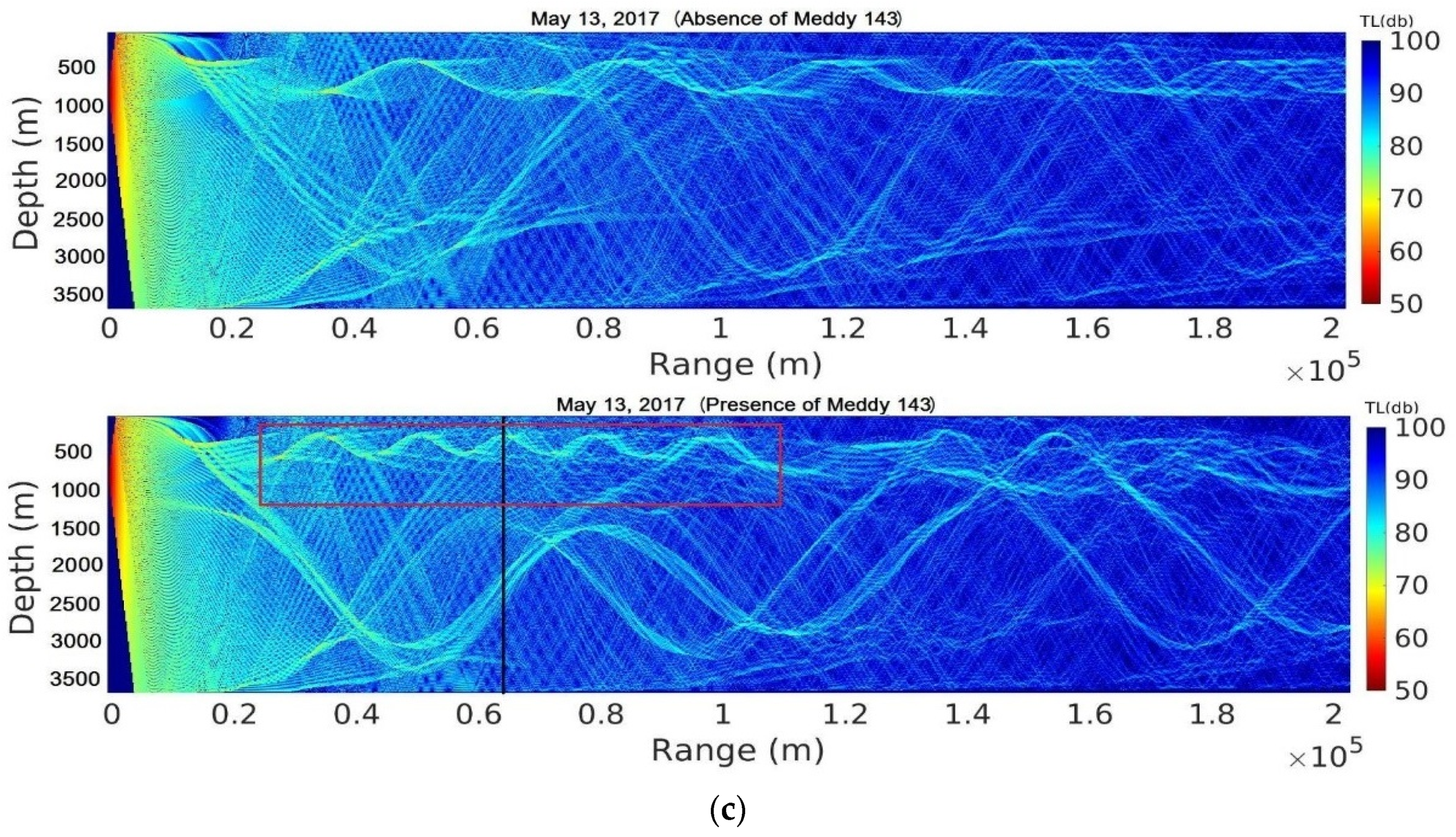
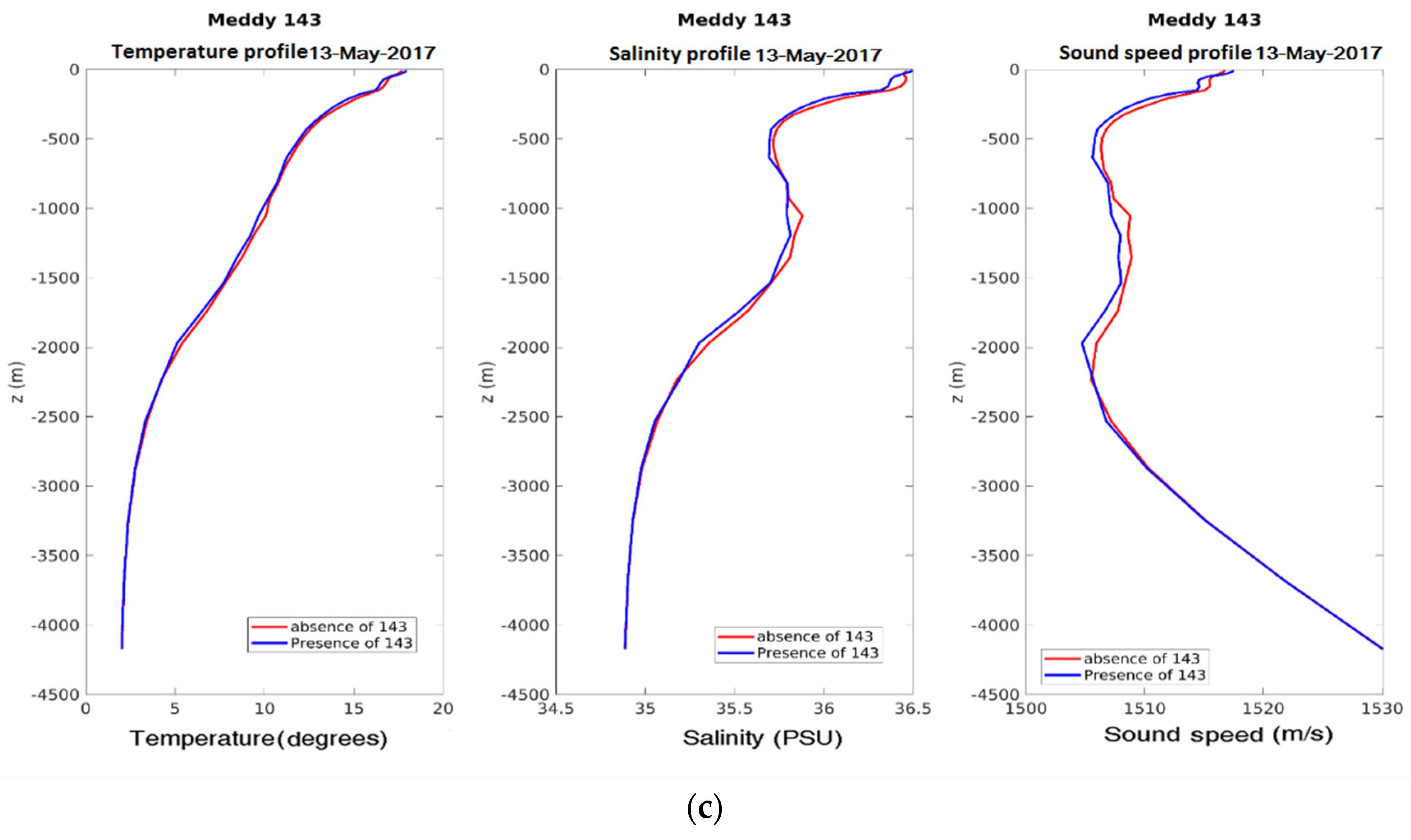
- The case of Meddy 143: this Meddy was tracked for 29 months and was first detected on 24 December 2013. Its radius and swirl velocity ranged from 17 to 44 km and 12 to 31 cm/s;
3.2.1. The Sound Propagation and the Transmission Loss of Sound Signals
3.2.2. The Number and Time of Arrival of Sound Signals at Different Receivers
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A














Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meddy (Date) | Number of Sound Signals Reaching the Receivers | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Label of Receiver (Depth (m), Range (km)) | Emission Angles (−10° to 10°) | Emission Angles (−10° to −25° and 10° to 25°) | Reception Angles (−10° to 10°) | Reception Angles (−10° to −25° and 10° to 25°) | |||||
| Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | ||
| Meddy 33 (6 February 2004) | 1 (2000 m, 10 km) | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 2 (2000 m, 73 km) | 5 | 2 | 4 | 8 | 4 | 1 | 5 | 9 | |
| 3 (2000 m, 100 km) | 3 | 6 | 9 | 10 | 2 | 6 | 10 | 10 | |
| 4 (11 m, 195 km) | 17 | 19 | 12 | 17 | 15 | 19 | 14 | 17 | |
| 5 (800 m, 195 km) | 22 | 41 | 15 | 28 | 19 | 40 | 18 | 29 | |
| 6 (1000 m, 195 km) | 9 | 28 | 15 | 22 | 10 | 30 | 14 | 20 | |
| 7 (2000 m, 195 km) | 8 | 22 | 16 | 30 | 6 | 22 | 18 | 30 | |
| 8 (3200 m, 195 km) | 6 | 30 | 18 | 31 | 8 | 30 | 16 | 31 | |
| Meddy 33 (28 January 2005) | 1 (1000 m, 10 km) | 1 | 1 | 5 | 4 | 1 | 1 | 5 | 4 |
| 2 (1000 m, 70 km) | 9 | 9 | 12 | 12 | 9 | 11 | 12 | 10 | |
| 3 (1000 m, 97 km) | 13 | 12 | 14 | 17 | 13 | 15 | 14 | 14 | |
| 4 (11 m, 150 km) | 13 | 25 | 13 | 17 | 13 | 29 | 13 | 13 | |
| 5 (500 m, 150 km) | 21 | 75 | 17 | 28 | 21 | 79 | 17 | 24 | |
| 6 (1000 m, 150 km) | 17 | 42 | 19 | 27 | 18 | 46 | 18 | 23 | |
| 7 (1500 m, 150 km) | 18 | 46 | 20 | 16 | 19 | 49 | 19 | 13 | |
| Meddy (Date) | Number of Sound Signals Reaching the Receivers | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Name of Receiver (Depth of Receiver (m), Range of Receiver (km)) | Emission Angles (−10° to 10°) | Emission Angles (−10° to −25° and 10° to 25°) | Reception Angles (−10° to 10°) | Reception Angles (−10° to −25° and 10° to 25°) | |||||
| Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | ||
| Meddy 33 (9 June 2006) | 1 (1000 m, 10 km) | 2 | 2 | 3 | 3 | 2 | 2 | 3 | 3 |
| 2 (1000 m, 50 km) | 3 | 5 | 5 | 10 | 3 | 7 | 5 | 8 | |
| 3 (1000 m, 80 km) | 7 | 10 | 8 | 12 | 7 | 11 | 8 | 11 | |
| 4 (11 m, 150 km) | 4 | 6 | 17 | 33 | 8 | 12 | 13 | 27 | |
| 5 (11 m, 195 km) | 18 | 18 | 11 | 34 | 18 | 23 | 11 | 29 | |
| 6 (600 m, 150 km) | 11 | 28 | 13 | 23 | 12 | 31 | 12 | 20 | |
| 7 (2000 m, 150 km) | 12 | 25 | 12 | 15 | 11 | 22 | 13 | 18 | |
| Meddy (Date) | Mean Time of Arrival [s] | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Name of Receiver (Depth of Receiver (m), Range of Receiver (km)) | Emission Angles (−10° to 10°) | Emission Angles (−10° to −25° and 10° to 25°) | Reception Angles (−10° to 10°) | Reception Angles (−10° to −25° and 10° to 25°) | |||||
| Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | ||
| Meddy 33 (6 February 2004) | 1 (2000 m, 10 km) | 6.67 | 6.67 | 6.88 | 6.88 | 6.67 | 6.67 | 6.88 | 6.88 |
| 2 (2000 m, 73 km) | 48.58 | 48.54 | 49.50 | 49.55 | 48.51 | 48.47 | 49.37 | 49.44 | |
| 3 (2000 m, 100 km) | 66.56 | 66.29 | 68.08 | 68.11 | 66.49 | 66.29 | 67.94 | 68.11 | |
| 4 (11 m, 195 km) | 129.57 | 129.40 | 132.24 | 132.74 | 129.52 | 129.40 | 131.92 | 132.74 | |
| 5 (800 m, 195 km) | 129.57 | 129.39 | 132.54 | 132.69 | 129.49 | 129.38 | 132.12 | 132.59 | |
| 6 (1000 m, 195 km) | 129.65 | 129.38 | 132.58 | 132.16 | 129.65 | 129.38 | 132.58 | 132.16 | |
| 7 (2000 m, 195 km) | 129.70 | 129.38 | 132.03 | 132.11 | 129.56 | 129.38 | 132.44 | 132.11 | |
| 8 (3200 m, 195 km) | 129.84 | 129.41 | 132.60 | 132.67 | 129.99 | 129.41 | 132.87 | 132.17 | |
| Meddy 33 (28 January 2005) | 1 (1000 m, 10 km) | 6.63 | 6.66 | 7.34 | 7.24 | 6.63 | 6.66 | 7.34 | 7.24 |
| 2 (1000 m, 70 km) | 46.54 | 46.58 | 48.28 | 48.30 | 46.54 | 46.67 | 48.28 | 48.31 | |
| 3 (1000 m, 97 km) | 64.54 | 64.47 | 66.56 | 66.58 | 64.54 | 64.61 | 66.56 | 66.89 | |
| 4 (11 m, 150 km) | 99.96 | 99.65 | 102.49 | 102.65 | 99.96 | 99.80 | 102.49 | 103.26 | |
| 5 (500 m, 150 km) | 99.73 | 99.63 | 102.66 | 102.26 | 99.73 | 99.69 | 102.66 | 102.51 | |
| 6 (1000 m, 150 km) | 99.87 | 99.67 | 102.89 | 102.93 | 99.92 | 99.77 | 103.01 | 103.08 | |
| 7 (1500 m, 150 km) | 99.80 | 99.69 | 103.00 | 102.83 | 99.85 | 99.76 | 103.12 | 103.30 | |
| Meddy (Date) | Mean Time of Arrival (s) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Name of Receiver (Depth of Receiver (m), Range of Receiver (km)) | Emission Angles (−10° to 10°) | Emission Angles (−10° to −25° and 10° to 25°) | Reception Angles (−10° to 10°) | Reception Angles (−10° to −25° and 10° to 25°) | |||||
| Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | ||
| Meddy 33 (9 June 2006) | 1 (1000 m, 10 km) | 6.64 | 6.63 | 7.37 | 7.37 | 6.64 | 6.63 | 7.37 | 7.37 |
| 2 (1000 m, 50 km) | 33.40 | 33.25 | 34.26 | 35.03 | 33.40 | 33.35 | 34.26 | 35.40 | |
| 3 (1000 m, 80 km) | 53.38 | 53.14 | 54.77 | 55.41 | 53.38 | 53.19 | 54.77 | 55.57 | |
| 4 (11 m, 150 km) | 100.38 | 99.65 | 102.30 | 103.52 | 100.77 | 100.34 | 102.80 | 104.08 | |
| 5 (11 m, 195 km) | 99.87 | 99.69 | 101.97 | 103.03 | 99.87 | 99.87 | 101.97 | 103.46 | |
| 6 (600 m, 150 km) | 99.99 | 99.69 | 102.14 | 102.81 | 100.05 | 99.76 | 102.25 | 103.17 | |
| 7 (2000 m, 150 km) | 100.12 | 99.80 | 102.52 | 102.54 | 100.07 | 99.73 | 102.37 | 102.13 | |
| Meddy (Date) | Number of Sound Signals Reaching the Receivers | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Name of Receiver (Depth of Receiver (m), Range of Receiver (km)) | Emission Angles (−10° to 10°) | Emission Angles (−10° to −25° and 10° to 25°) | Reception Angles (−10° to 10°) | Reception Angles (−10° to −25° and 10° to 25°) | |||||
| Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | ||
| Meddy 120 (9 December 2014) | 1 (11 m,195 km) | 8 | 16 | 20 | 20 | 12 | 20 | 16 | 16 |
| 2 (500 m, 195 km) | 27 | 45 | 20 | 20 | 26 | 45 | 21 | 20 | |
| 3 (1500 m, 195 km) | 16 | 35 | 20 | 20 | 16 | 35 | 20 | 20 | |
| 4 (1500 m, 10 km) | 2 | 2 | 3 | 4 | 1 | 2 | 4 | 4 | |
| 5 (1500 m, 68 km) | 7 | 6 | 10 | 10 | 7 | 6 | 10 | 10 | |
| 6 (1500 m, 100 km) | 6 | 16 | 13 | 13 | 6 | 17 | 13 | 12 | |
| Meddy 135 (25 January 2016) | 1 (11 m, 185 km) | 4 | 32 | 20 | 20 | 10 | 36 | 14 | 16 |
| 2 (800 m, 185 km) | 25 | 95 | 18 | 19 | 26 | 96 | 17 | 18 | |
| 3 (1200 m, 185 km) | 20 | 98 | 17 | 16 | 21 | 99 | 16 | 15 | |
| 4 (1200 m, 10 km) | 1 | 1 | 3 | 3 | 1 | 1 | 3 | 3 | |
| 5 (1200 m, 43 km) | 4 | 3 | 9 | 9 | 4 | 3 | 9 | 9 | |
| 6 (1200 m, 100 km) | 13 | 17 | 11 | 20 | 13 | 17 | 11 | 10 | |
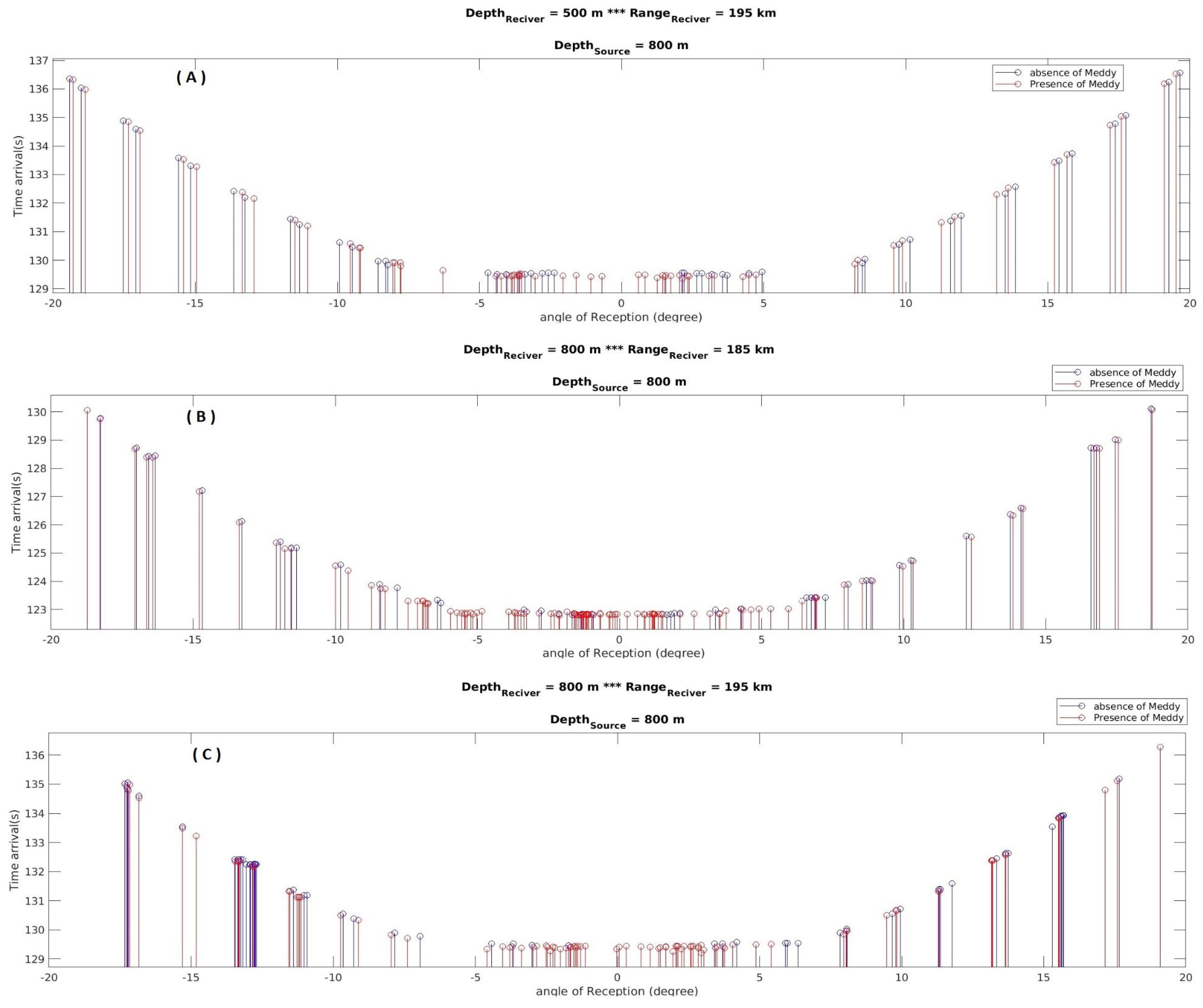
| Meddy 143 (13 May 2017) | 1 (11 m, 195 km) | 8 | 21 | 29 | 40 | 11 | 28 | 26 | 33 |
| 2 (800 m, 195 km) | 18 | 60 | 35 | 39 | 18 | 62 | 35 | 37 | |
| 3 (1500 m, 195 km) | 17 | 57 | 46 | 53 | 17 | 58 | 46 | 52 | |
| 4 (1500 m, 10 km) | 1 | 1 | 3 | 3 | 1 | 1 | 3 | 3 | |
| 5 (1500 m, 62 km) | 4 | 4 | 12 | 11 | 4 | 4 | 12 | 11 | |
| 6 (1500 m, 100 km) | 7 | 15 | 17 | 20 | 7 | 16 | 17 | 19 | |
| Meddy (Date) | Mean Time of Arrival (s) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Name of Receiver (Depth of Receiver (m), Range of Receiver (km)) | Emission Angles (−10° to 10°) | Emission Angles (−10° to −25° and 10° to 25°) | Reception Angles (−10° to 10°) | Reception Angles (−10° to −25° and 10° to 25°) | |||||
| Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | Absence of Meddy | Presence of Meddy | ||
| Meddy 120 (9 December 2014) | 1 (11 m, 195 km) | 130.26 | 129.86 | 133.69 | 133.65 | 130.64 | 130.16 | 134.26 | 134.22 |
| 2 (500 m, 195 km) | 129.76 | 129.65 | 133.69 | 133.65 | 129.73 | 129.65 | 133.55 | 133.65 | |
| 3 (1500 m, 195 km) | 129.90 | 129.74 | 133.69 | 133.67 | 129.90 | 129.74 | 133.69 | 133.67 | |
| 4 (1500 m, 10 km) | 6.65 | 6.65 | 7.25 | 7.25 | 6.65 | 6.65 | 7.25 | 7.25 | |
| 5 (1500 m, 68 km) | 45.31 | 45.25 | 47.13 | 47.10 | 45.31 | 45.25 | 47.13 | 47.10 | |
| 6 (1500 m, 100 km) | 66.66 | 66.46 | 69.00 | 68.94 | 66.66 | 66.50 | 69.00 | 69.09 | |
| Meddy 135 (25 January 2016) | 1 (11 m, 185 km) | 123.89 | 123.21 | 126.84 | 126.81 | 124.65 | 123.40 | 127.56 | 127.27 |
| 2 (800 m, 185 km) | 123.27 | 123.01 | 127.16 | 127.28 | 123.32 | 123.02 | 127.31 | 127.44 | |
| 3 (1200 m, 185 km) | 123.33 | 122.95 | 127.22 | 127.17 | 123.39 | 122.97 | 127.38 | 127.35 | |
| 4 (1200 m, 10 km) | 6.64 | 6.64 | 7.35 | 7.34 | 6.64 | 6.64 | 7.35 | 7.34 | |
| 5 (1200 m, 43 km) | 28.66 | 28.65 | 30.49 | 30.47 | 28.64 | 28.65 | 30.49 | 30.47 | |
| 6 (1200 m, 100 km) | 66.63 | 66.57 | 68.95 | 68.69 | 66.63 | 66.57 | 68.95 | 68.69 | |
| Meddy 143 (13 May 2017) | 1 (11 m, 195 km) | 130.14 | 129.68 | 133.22 | 133.10 | 130.47 | 130.07 | 133.44 | 133.50 |
| 2 (800 m, 195 km) | 129.84 | 129.50 | 132.81 | 132.73 | 129.84 | 129.53 | 132.81 | 132.84 | |
| 3 (1500 m, 195 km) | 129.82 | 129.50 | 132.56 | 132.27 | 129.82 | 129.52 | 132.56 | 132.30 | |
| 4 (1500 m, 10 km) | 6.65 | 6.65 | 7.40 | 7.40 | 6.65 | 6.65 | 7.40 | 7.40 | |
| 5 (1500 m, 62 km) | 41.35 | 41.32 | 42.64 | 42.53 | 41.35 | 41.32 | 42.64 | 42.53 | |
| 6 (1500 m, 100 km) | 66.63 | 66.39 | 68.13 | 68.12 | 66.63 | 66.44 | 68.13 | 68.18 | |
References
- Maia, L.P.; Carriere, O.; Parente, C.E.; Hermand, J.P. Acoustic inversion with a frequency-domain version of the model-based matched filter processing. In Proceedings of the European Conference on Underwater Acoustics, Istanbul, Turkey, 5–9 July 2010. [Google Scholar]
- Lermusiaux, P.F.J.; Haley, P.J.; Mirabito, C.; Ali, W.H.; Bhabra, M.; Abbot, P.; Chiu, C.S.; Emerson, C. Multi-resolution Probabilistic Ocean Physics-Acoustics Modeling: Validation in the New Jersey Continental Shelf. In Proceedings of the Global Oceans Conference, Singapore, 5–31 October 2020. [Google Scholar] [CrossRef]
- Chen, X.; Hong, M.; Zhu, W.; Mao, K.; Ge, J.J.; Bao, S. The analysis of acoustic propagation characteristics affected by mesoscale cold-core vortex, based on the UMPE model. Acoust. Aust. 2019, 47, 33–49. [Google Scholar] [CrossRef]
- Li, J.; Zhang, R.; Liu, C.; Fan, H. Modeling of ocean mesoscale eddy and its application in the underwater acoustic propagation. Mar. Sci. Bull. 2012, 14, 1–15. [Google Scholar]
- Chelton, D.B.; Schlax, M.G.; Samelson, R.M. Global observations of nonlinear mesoscale eddies. Prog. Oceanogr. 2011, 91, 167–216. [Google Scholar] [CrossRef]
- De Marez, C.; Carton, X.; L’Hégaret, P. Oceanic vortex mergers are not isolated but influenced by the β-effect and surrounding eddies. Sci. Rep. 2020, 10, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Marez, C.; Carton, X.; Corréard, S.; L’Hégaret, P.; Morvan, M. Observations of a deep submesoscale cyclonic vortex in the Arabian Sea. Geophys. Res. Lett. 2020, 47, e2020GL087881. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, W.; Qiu, B. Oceanic mass transport by mesoscale eddies. Science 2014, 345, 322–324. [Google Scholar] [CrossRef]
- Dong, C.; McWilliams, J.C.; Lu, Y.; Chen, D. Global heat and salt transports by eddy movements. Nat. Commun. 2014, 5, 1–6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- L’Hegaret, P.; Duarte, R.; Carton, X.; Vic, C.; Ciani, D.; Baraille, R.; Correard, S. Mesoscale variability in the Arabian Sea from HYCOM model results and observations: Impact on the Persian Gulf Water path. Ocean Sci. 2015, 11, 667–693. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Li, C.; Liu, Q. Observation of an anti-cyclonic mesoscale eddy in the subtropical northwestern Pacific Ocean from altimetry and Argo profiling floats. Acta Oceanol. Sin. 2020, 39, 79–90. [Google Scholar] [CrossRef]
- Henrick, R.; Jacobson, M.; Siegmann, W. General effects of currents and sound-speed variations on short-range acoustic transmission in cyclonic eddies. J. Acoust. Soc. Am. 1980, 67, 121–134. [Google Scholar] [CrossRef]
- Bong-Chae, K.; Kyoung Choi, C.; Byoung-Nam, K. Influence of a Warm Eddy on Low-frequency Sound Propagation in the East Sea. Ocean Polar Res. 2012, 34, 325–335. [Google Scholar]
- Lawrence, M. Modeling of acoustic propagation across warm-core eddies. J. Acoust. Soc. Am. 1983, 73, 474–485. [Google Scholar] [CrossRef]
- Qingyu, L. Sound Propagation under the Mesoscale Ocean Phenomena. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2006. [Google Scholar]
- Baer, R.N. Calculations of sound propagation through an eddy. J. Acoust. Soc. Am. 1980, 67, 1180–1185. [Google Scholar] [CrossRef]
- Swallow, J. A deep eddy off Cape st. Vincent. Deep-Sea Res. 1969, 16, 285–295. [Google Scholar]
- Armi, L.; Hebert, D.; Oakey, N.; Price, J.F.; Richardson, P.L.; Rossby, H.T.; Ruddick, B. Two years in the life of a Mediterranean salt lens. J. Phys. Oceanogr. 1989, 19, 354–370. [Google Scholar] [CrossRef]
- Barbosa Aguiar, A.C.; Peliz, A.; Carton, X. A census of Meddies in a long-term high-resolution simulation. Prog. Oceanogr. 2013, 116, 80–94. [Google Scholar] [CrossRef] [Green Version]
- Bashmachnikov, I.; Neves, F.; Calheiros, T.; Carton, X. Properties and pathways of Mediterranean water eddies in the Atlantic. Prog. Oceanogr. 2015, 137, 149–172. [Google Scholar] [CrossRef]
- Shchepetkin, A.F.; Mcwilliams, J.C. The regional oceanic modeling system (ROMS): A split-explicit, free-surface, topography-following-coordinate oceanic model. Ocean Model 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Da Silva, A.; Young, A.C.; Levitus, S. Atlas of Surface Marine Data: Algorithms and Procedures; Number 6, COADS, NCAR/UCAR Data Archive; U.S. Department of Commerce: Washington, DC, USA, 1994; Volume 1.
- Nencioli, F.; Changing, D.; Dickey, T.; Washburn, L.; McWilliams, J. A vector geometry-based Eddy Detection Algorithm and Its Application to a High-Resolution Numerical Model Product and High-Frequency Radar Surface Velocities in the Southern California Bight. J. Atmos. Ocean Technol. 2010, 27, 564–579. [Google Scholar] [CrossRef]
- Richardson, P.L.; Bower, A.S.; Zenk, W. A census of Meddies tracked by floats. Prog. Oceanogr. 2000, 45, 209–250. [Google Scholar] [CrossRef]
- Ciani, D.; Carton, X.; Barbosa Aguiar, A.C. Surface signature of Mediterranean water eddies in a long-term high-resolution simulation. Deep-Sea Res. Part I Oceanogr. Res. Pap. 2017, 130, 12–29. [Google Scholar] [CrossRef] [Green Version]
- De Sousa Costa, E.; Medeiros, E. Numerical modeling and simulation of acoustic propagation in shallow water. Mecânica Comput. Acional. 2010, 29, 2215–2228. [Google Scholar]
- Maggi, A.L.; Duncan, A.J. AcTUO v2.2 1—Acoustic Toolbox User-interface and Post-Processor, Installation and User Guide; Curtin University of Technology, Centre for Marine Science and Technology: Bentley, WA, Australia, 2006. [Google Scholar]
- Mackenzie, K.V. Nine equation for Sound Speed in the Oceans. J. Acoust. Soc. Am. 1981, 33, 1498–1504. [Google Scholar] [CrossRef]
- Khan, S.; Song, Y.; Huang, J.; Piao, S. Analysis of Underwater Acoustic Propagation under the Influence of Mesoscale Ocean Vortices. J. Mar. Sci. Eng. 2021, 8, 799. [Google Scholar] [CrossRef]
- Hassantabar Bozroudi, S.H.; Mohammad Mehdizadeh, M.; Akbarinasab, M. Investigation of the loss of sound signals in the presence of Eddy in a hypothetical area. J. Mar. Eng. 2021, 17, 123–133. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassantabar Bozroudi, S.H.; Ciani, D.; Mohammad Mahdizadeh, M.; Akbarinasab, M.; Aguiar, A.C.B.; Peliz, A.; Chapron, B.; Fablet, R.; Carton, X. Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model. Water 2021, 13, 3617. https://doi.org/10.3390/w13243617
Hassantabar Bozroudi SH, Ciani D, Mohammad Mahdizadeh M, Akbarinasab M, Aguiar ACB, Peliz A, Chapron B, Fablet R, Carton X. Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model. Water. 2021; 13(24):3617. https://doi.org/10.3390/w13243617
Chicago/Turabian StyleHassantabar Bozroudi, Seyed Hossein, Daniele Ciani, Mahdi Mohammad Mahdizadeh, Mohammad Akbarinasab, Ana Claudia Barbosa Aguiar, Alvaro Peliz, Bertrand Chapron, Ronan Fablet, and Xavier Carton. 2021. "Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model" Water 13, no. 24: 3617. https://doi.org/10.3390/w13243617
APA StyleHassantabar Bozroudi, S. H., Ciani, D., Mohammad Mahdizadeh, M., Akbarinasab, M., Aguiar, A. C. B., Peliz, A., Chapron, B., Fablet, R., & Carton, X. (2021). Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model. Water, 13(24), 3617. https://doi.org/10.3390/w13243617