Symmetric Face Normalization


Abstract
:1. Introduction
Related Work
2. Symmetric Face Normalization Algorithm
2.1. Symmetric Face Normalization
| Algorithm 1 Symmetric Face Normalization Algorithm |
|
2.2. Symmetric Face Alignment
3. Experimental Evaluation
- The FERET database contains 15 sessions of face pictures. It was collected during 1993 and 1996. The dataset includes 14,126 images of 1199 individuals, which are separated into 1564 sets. Moreover, there are duplicate sets which contain images of same person that are already in the database but collected on a different day. This time difference is as long as two years to allow enough distinction. In the following experiments, only “fb” with a smile expression is chosen. Example images are shown in Figure 1.
- The Cohn–Kanade Database is collected for research in automatic facial image analysis and collected with 97 subjects. It contains 486 video sequences, each of which begins with a neutral expression and ends with a peak expression. In this paper, both neutral and peak expressions are involved for our test. Example images are shown in Figure 2.
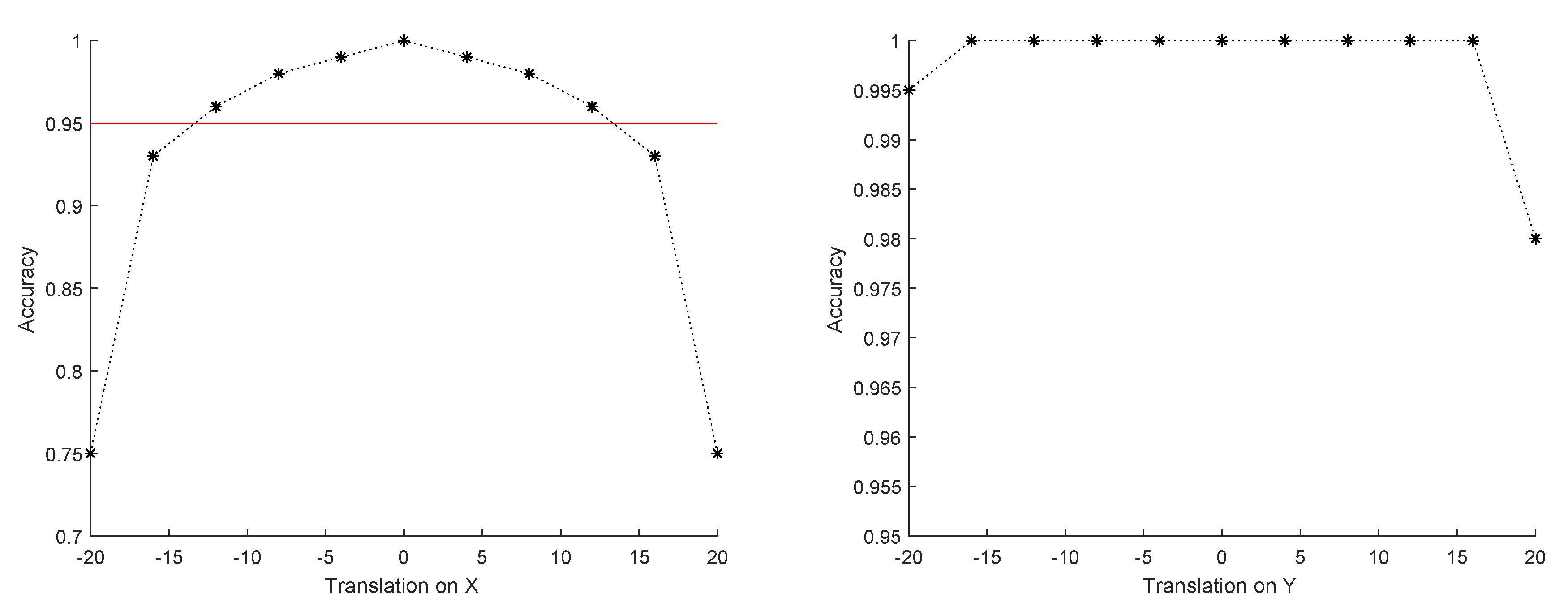
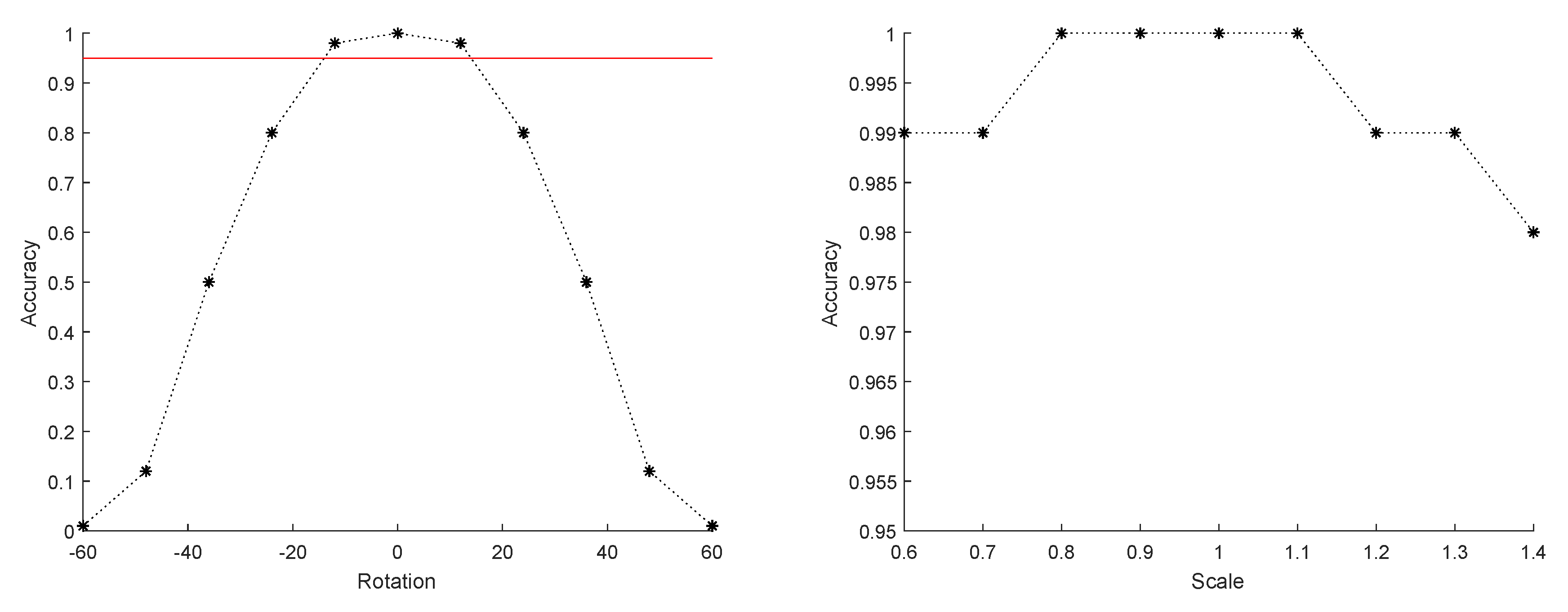
3.1. Symmetric Face Normalization
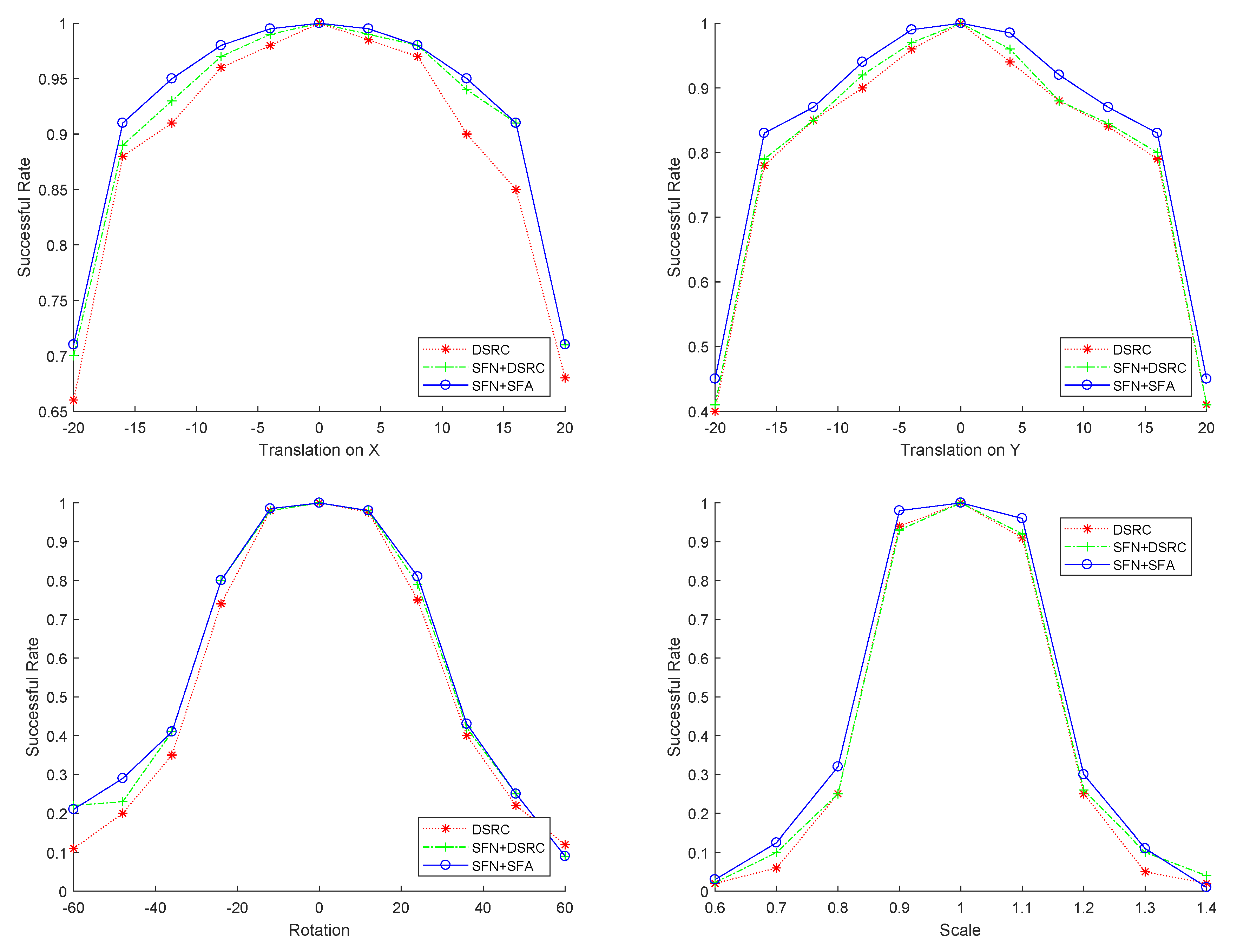
3.2. Symmetric Face Alignment (SFA)
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cootes, T.F.; Edwards, G.J.; Taylor, C.J. Active Appearance Models. In Proceedings of the European Conference on Computer Vision, Freiburg, Germany, 2–6 June 1998; Volume 2, pp. 484–498. [Google Scholar]
- Gao, X.; Su, Y.; Li, X.; Tao, D. A Review of Active Appearance Models. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2010, 40, 145–158. [Google Scholar]
- Wan, J.; Ren, X.; Hu, G. Automatic red-eyes detection based on AAM. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004; Volume 7, pp. 6337–6341. [Google Scholar]
- Xiao, B.; Gao, X.; Tao, D.; Li, X. A new approach for face recognition by sketches in photos. Signal Process. 2009, 89, 1576–1588. [Google Scholar] [CrossRef]
- Stegmann, M.B. Object tracking using active appearance models. In Proceedings of the Danish Conference on Pattern Recognition and Image Analysis, Copenhagen, Denmark, July 2001; Volume 1, pp. 54–60. Available online: http://www2.imm.dtu.dk/pubdb/views/publication_details.php?id=115 (accessed on 16 January 2019).
- Li, X.; Maybank, S.J.; Shuicheng, Y.; Tao, D.; Dong, X. Gait Components and Their Application to Gender Recognition. IEEE Transa. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 145–155. [Google Scholar] [Green Version]
- Mitchell, S.C.; Lelieveldt, B.P.F.; van der Geest, R.J.; Bosch, H.G.; Reiver, J.H.C.; Sonka, M. Multistage hybrid active appearance model matching: Segmentation of left and right ventricles in cardiac MR images. IEEE Trans. Med. Imaging 2001, 20, 415–423. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Wei, Y.; Wen, F.; Sun, J. Face alignment by explicit shape regression. Int. J. Comput. Vis. 2014, 107, 177–190. [Google Scholar] [CrossRef]
- Kazemi, V.; Sullivan, J. One millisecond face alignment with an ensemble of regression trees. In Proceedings of the Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1867–1874. [Google Scholar]
- Xiao, S.; Feng, J.; Xing, J.; Lai, H.; Yan, S.; Kassim, A. Robust facial landmark detection via recurrent attentive-refinement networks. In European Conference on Computer Vision; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2016; Volume 9905, pp. 57–72. [Google Scholar]
- Fan, H.; Zhou, E. Approaching human level facial landmark localization by deep learning. Image Vis. Comput. 2016, 47, 427–435. [Google Scholar] [CrossRef]
- Bulat, A.; Tzimiropoulos, G. Two-stage convolutional part heatmap regression for the 1st 3D face alignment in the wild (3DFAW) challenge. In European Conference on Computer Vision; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2016; Volume 9914, pp. 616–624. [Google Scholar]
- Trigeorgis, G.; Snape, P.; Nicolaou, M.A.; Antonakos, E.; Zafeiriou, S. Mnemonic Descent Method: A Recurrent Process Applied for End-to-End Face Alignment. In Proceedings of the Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4177–4187. [Google Scholar]
- Kowalski, M.; Naruniec, J.; Trzcinski, T. Deep Alignment Network: A Convolutional Neural Network for Robust Face Alignment. In Proceedings of the Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 2034–2043. [Google Scholar]
- Wagner, A.; Wright, J.; Ganesh, A.; Zhou, Z.; Mobahi, H.; Ma, Y. Toward a Practical Face Recognition System: Robust Alignment and Illumination by Sparse Representation. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 372–386. [Google Scholar] [CrossRef] [PubMed]
- Zhuang, L.; Yang, A.Y.; Zhou, Z.; Sastry, S.S.; Ma, Y. Single-Sample Face Recognition with Image Corruption and Misalignment via Sparse Illumination Transfer. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Zhuang, L.; Chan, T.H.; Yang, A.Y.; Sastry, S.S.; Ma, Y. Sparse Illumination Learning and Transfer for Single-Sample Face Recognition with Image Corruption and Misalignment. Int. J. Comput. Vis. 2015, 114, 272–287. [Google Scholar] [CrossRef]
- Masuda, T.; Yamamoto, K.; Yamada, H. Extraction of symmetry properties using correlation with rotated and reflected images. Electron. Commun. Japan (Part III Fundam. Electron. Sci.) 1993, 76, 8–19. [Google Scholar] [CrossRef]
- Liu, Y.; Hays, J.; Xu, Y.Q.; Shum, H.Y. Digital papercutting. In Proceedings of the ACM SIGGRAPH, Los Angeles, CA, USA, 31 July–4 August 2005. [Google Scholar]
- Loy, G.; Eklundh, J.O. Detecting symmetry and symmetric constellations of features. In European Conference on Computer Vision; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3952, pp. 508–521. [Google Scholar]
- Lee, S.; Liu, Y. Curved glide-reflection symmetry detection. IEEE Trans. Pattern Anal. Mach. Intel. 2012, 34, 266–278. [Google Scholar]
- Kondra, S.; Petrosino, A.; Iodice, S. Multi-scale kernel operators for reflection and rotation symmetry: Further achievements. In Proceedings of the Computer Vision and Pattern Recognition Workshops, Portland, OR, USA, 23–28 June 2013; pp. 217–222. [Google Scholar]
- Patraucean, V.; Von Gioi, R.G.; Ovsjanikov, M. Detection of mirror-symmetric image patches. In Proceedings of the Computer Vision and Pattern Recognition Workshops, Portland, OR, USA, 23–28 June 2013; pp. 211–216. [Google Scholar]
- Michaelsen, E.; Muench, D.; Arens, M. Recognition of symmetry structure by use of gestalt algebra. In Proceedings of the Computer Vision and Pattern Recognition Workshops, Portland, OR, USA, 23–28 June 2013; pp. 206–210. [Google Scholar]
- Cicconet, M.; Geiger, D.; Gunsalus, K.C.; Werman, M. Mirror symmetry histograms for capturing geometric properties in images. In Proceedings of the Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2981–2986. [Google Scholar]
- Cai, D.; Li, P.; Su, F.; Zhao, Z. An adaptive symmetry detection algorithm based on local features. In Proceedings of the Visual Communications and Image Processing Conference, Valletta, Malta, 7–10 December 2015; pp. 478–481. [Google Scholar]
- Wang, Z.; Tang, Z.; Zhang, X. Reflection symmetry detection using locally affine invariant edge correspondence. IEEE Trans. Image Process. 2015, 24, 1297–1301. [Google Scholar] [CrossRef] [PubMed]
- Cicconet, M.; Birodkar, V.; Lund, M.; Werman, M.; Geiger, D. A convolutional approach to reflection symmetry. Pattern Recogn. Lett. 2017, 95, 44–50. [Google Scholar] [CrossRef] [Green Version]
- Funk, C.; Liu, Y. Symmetry reCAPTCHA. In Proceedings of the Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5165–5174. [Google Scholar]
- Barnea, D.; Silverman, H.F. A Class of Algorithms for Fast Digital Image Registration. IEEE Trans. Comput. 1972, C-21, 179–186. [Google Scholar] [CrossRef]
- Lucas, B.D.; Kanade, T. An Iterative Image Registration Technique with an Application to Stereo Vision. Robotics 1981, 81, 674–679. [Google Scholar]
- Baker, S.; Matthews, I. Lucas–Kanade 20 years on: A unifying framework. Int. J. Comput. Vis. 2004, 56, 221–255. [Google Scholar] [CrossRef]
- Wright, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Yi, M. Robust Face Recognition via Sparse Representation. IEEE Trans. Pattern Anal. Mach. Intel. 2009, 31, 210–227. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phillips, P.J.; Wechsler, H.; Huang, J.; Rauss, P.J. The FERET database and evaluation procedure for face-recognition algorithms. Image Vis. Comput. 1998, 16, 295–306. [Google Scholar] [CrossRef]
- Kanade, T.; Cohn, J.F.; Yingli, T. Comprehensive database for facial expression analysis. In Proceedings of the IEEE International Conference on Automatic Face and Gesture Recognition, Santa Barbara, CA, USA, 21–23 March 2000. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DSRC | SFN + DSRC | SFN + SFA | |
|---|---|---|---|
| ART (s) | 1.21 ± 0.11 | 1.19 ± 0.95 | 0.32 ± 0.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, Y.; Liu, Z.; Ban, X. Symmetric Face Normalization. Symmetry 2019, 11, 96. https://doi.org/10.3390/sym11010096
Su Y, Liu Z, Ban X. Symmetric Face Normalization. Symmetry. 2019; 11(1):96. https://doi.org/10.3390/sym11010096
Chicago/Turabian StyleSu, Ya, Zhe Liu, and Xiaojuan Ban. 2019. "Symmetric Face Normalization" Symmetry 11, no. 1: 96. https://doi.org/10.3390/sym11010096
APA StyleSu, Y., Liu, Z., & Ban, X. (2019). Symmetric Face Normalization. Symmetry, 11(1), 96. https://doi.org/10.3390/sym11010096