
A Topology Optimization Method Based on Non-Uniform Rational Basis Spline Hyper-Surfaces for Heat Conduction Problems



Abstract
:1. Introduction
2. Fundamentals of NURBS Hyper-Surfaces
3. The NURBS-Based SIMP Method
4. Numerical Results
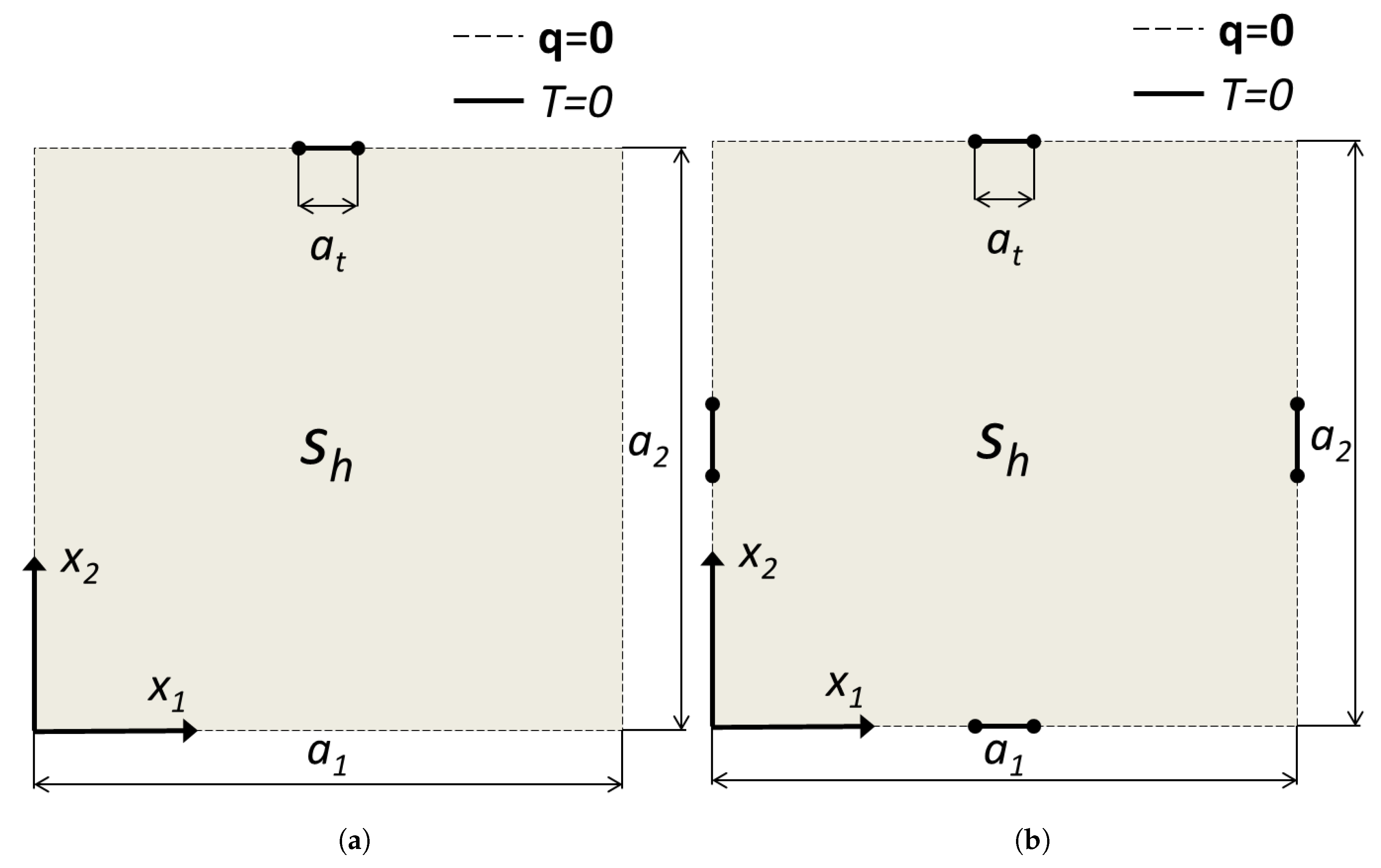
4.1. 2D Benchmark Problems
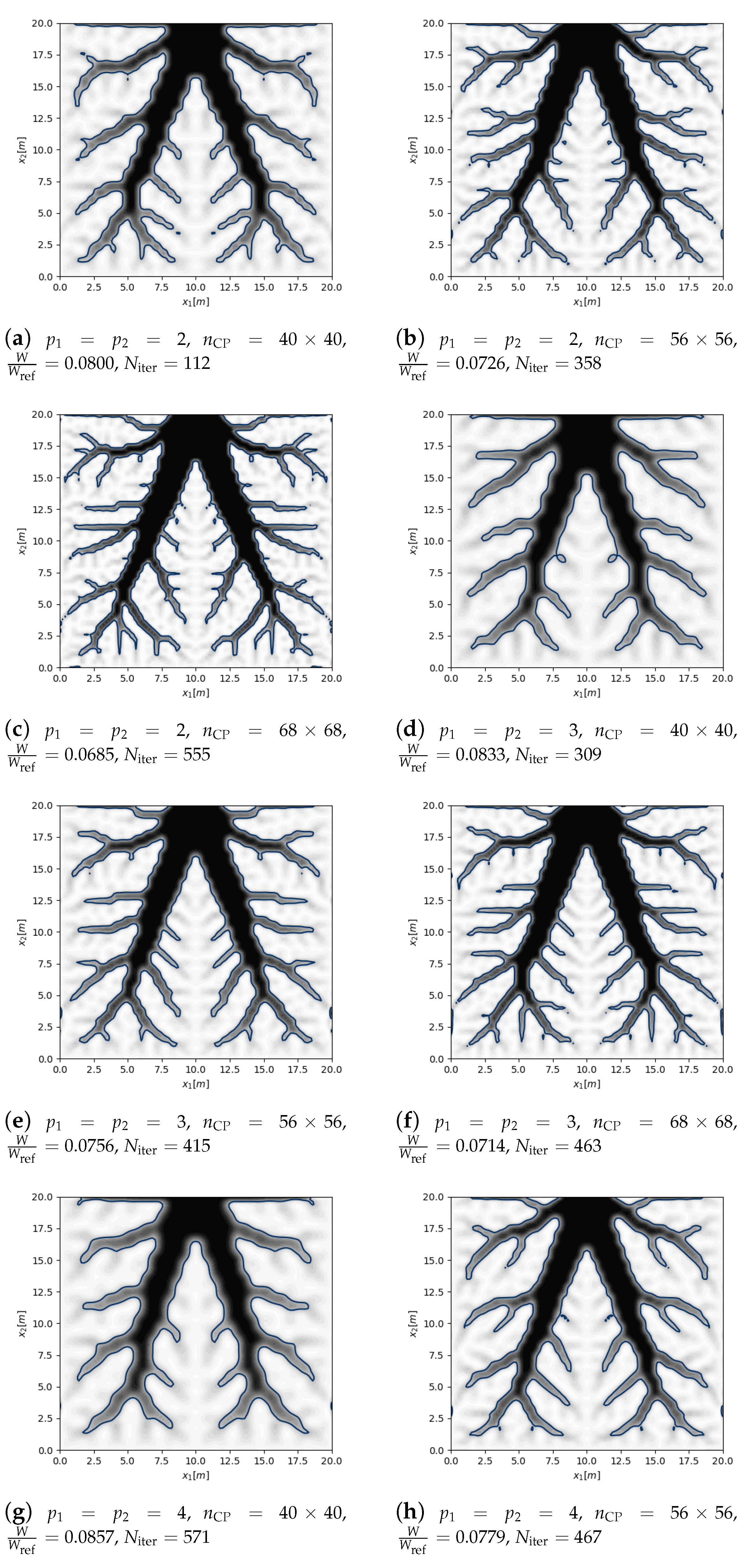
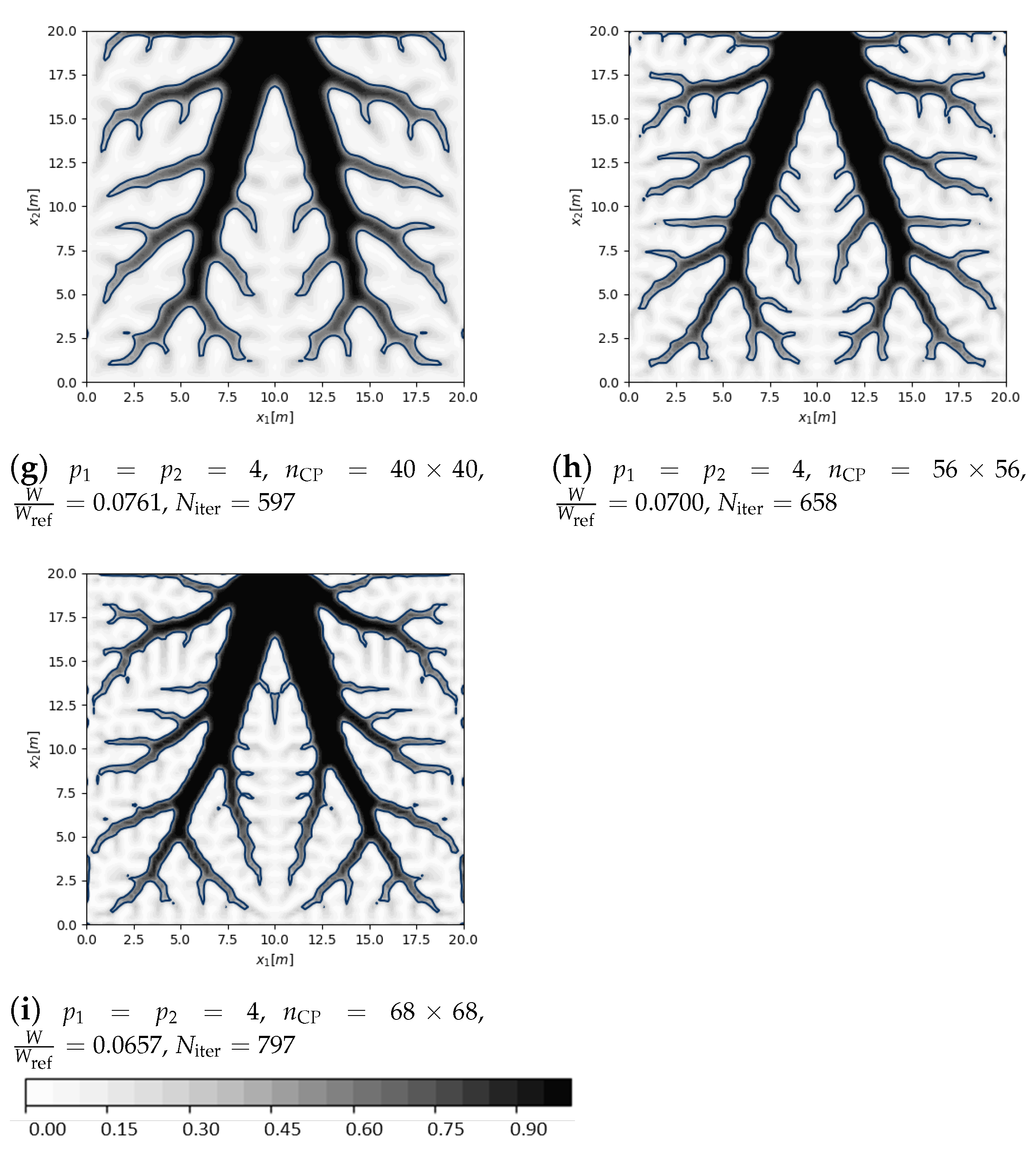
4.1.1. BK1-2D: Sensitivity of the Optimized Topology to the B-Spline and NURBS Entities Integer Parameters
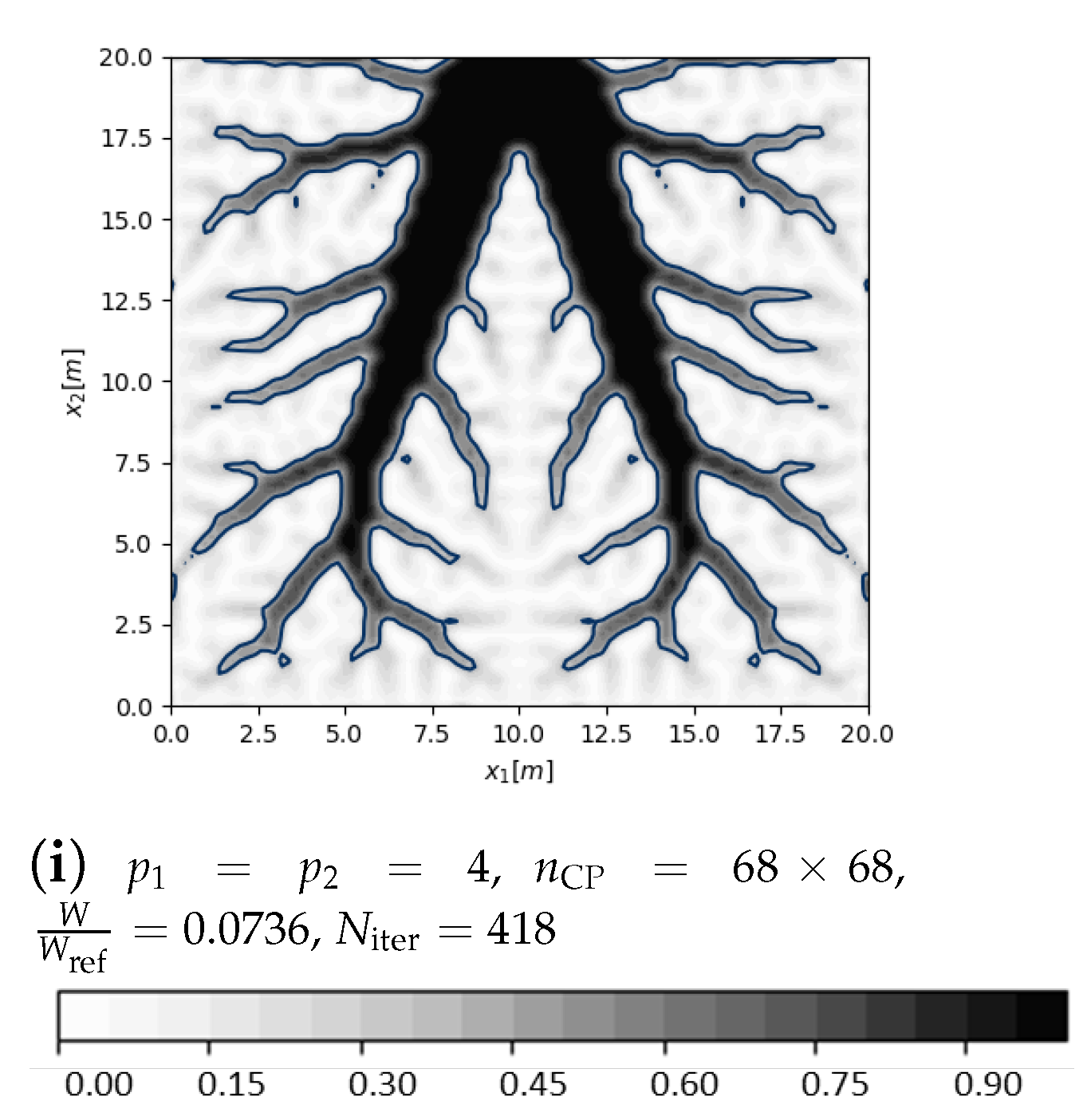
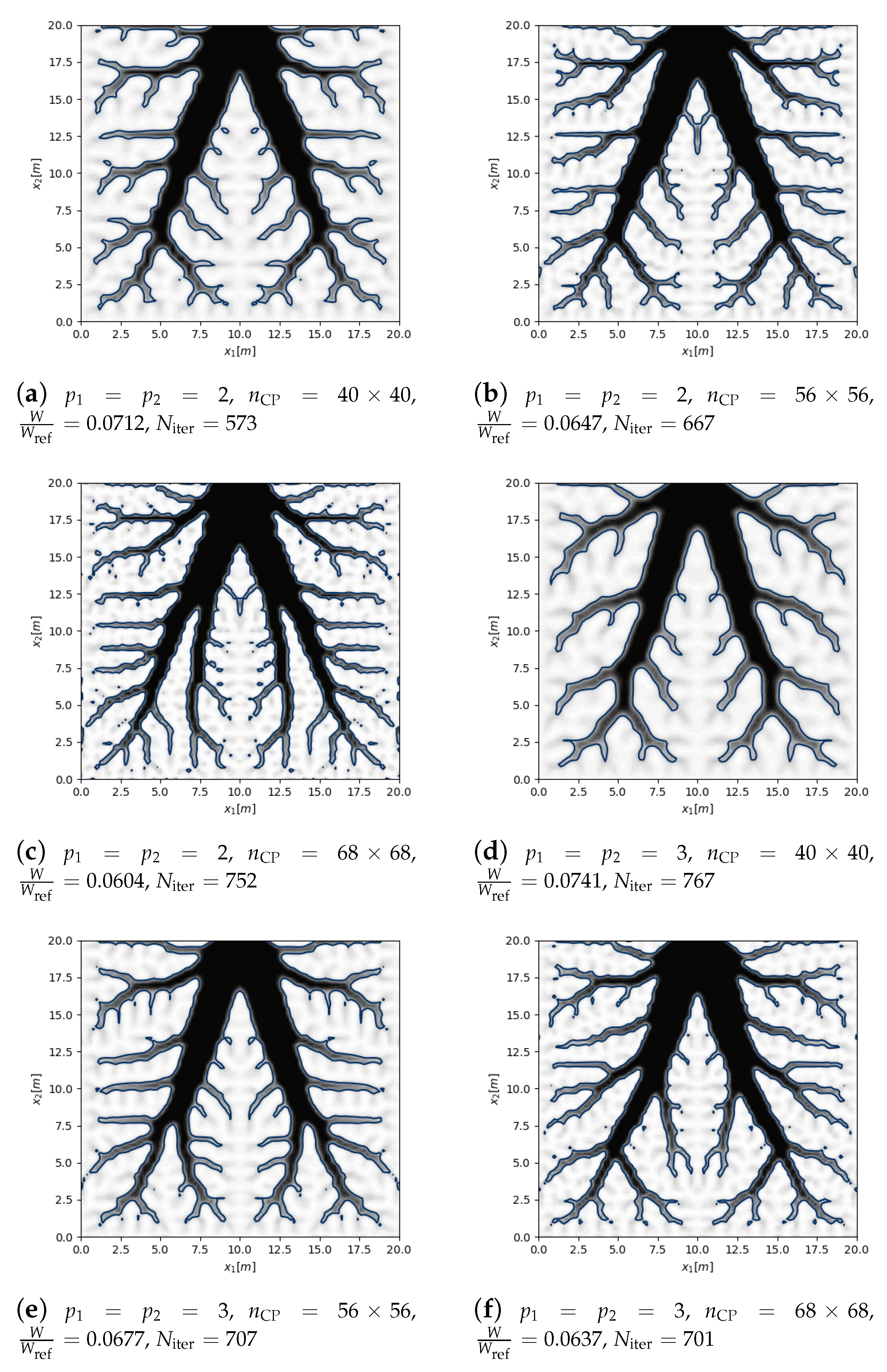
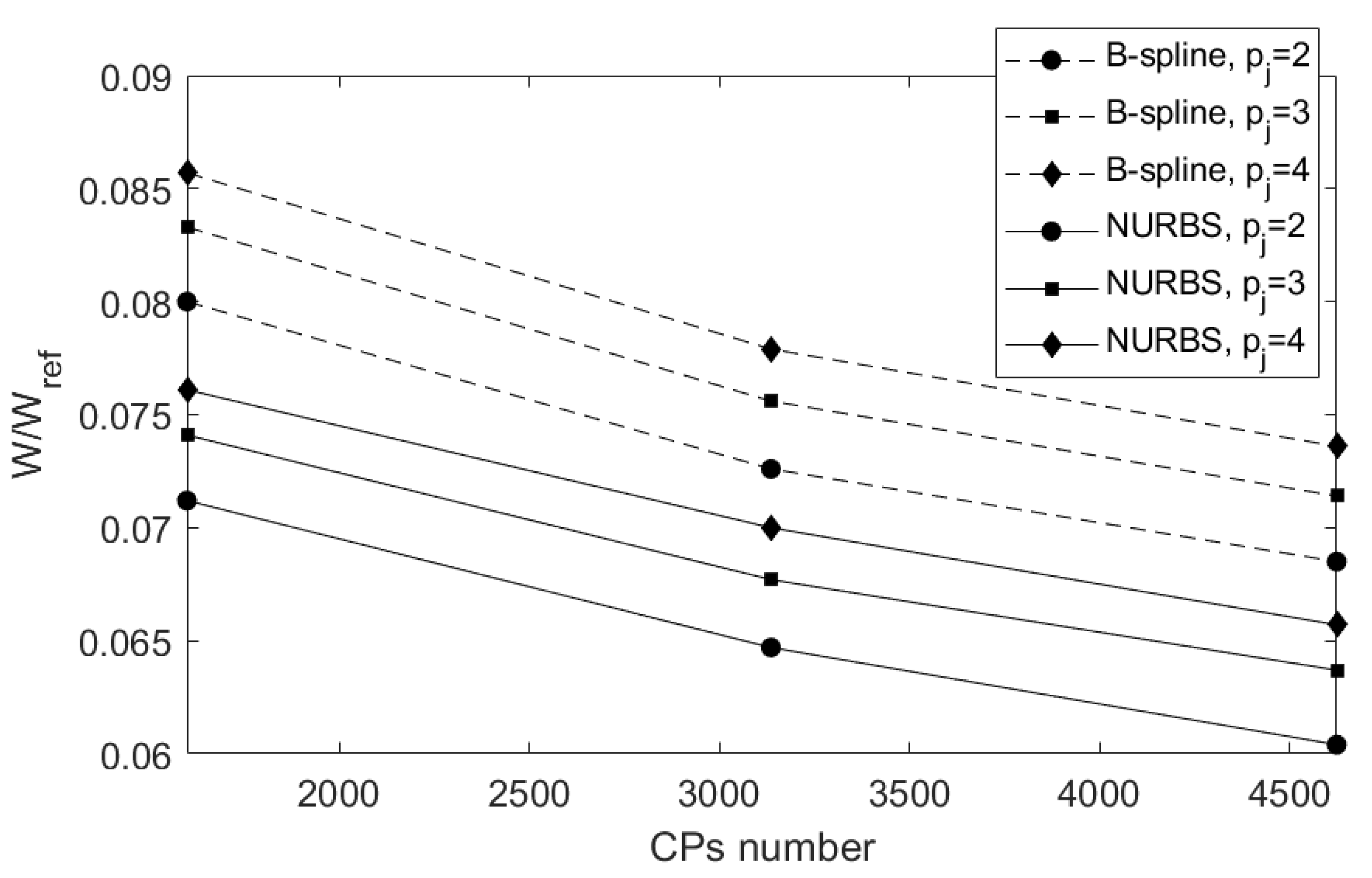
- For B-spline and NURBS solutions, the higher the number of CPs (or the lower the degree) the smaller the objective function value. As explained in [32,33], this is due to the local support size: the higher the CPs number for a given degree (or the lower the degree for a given number of CPs) the smaller the local support size, consequently smaller topological branches appear in optimized topologies. Moreover, the higher the degree (for a given CPs number) the smoother the boundary of the final topology.
- The NURBS local support can be associated to the concept of the filter zone in standard density-based TO algorithms, as stated in Section 3. According to the definition of the local support of Equation (9), the higher the degree (or the smaller the CPs number) the wider the local support; thus, a single control point affects a wider region of the computation domain. Indeed, as discussed in [35], the local support of Equation (9) enforces a minimum length scale in the optimized topology. Consequently, it can be stated that a high number of CPs and small degrees should be considered if minimum member size does not constitute a restriction for the problem at hand. High degrees and/or small CPs number should be considered otherwise.
- The effect of including the weights among the design variables is twofold: on the one hand, weights contribute to improve the final performances (the objective function of a NURBS solution is always lower than the one of a B-spline solution), whilst, on the other hand, they allow for obtaining optimized topologies characterized by a boundary smoother than the B-spline counterpart.
- The constraint on the volume fraction gets a very small negative value (between and 0) for the optimized topologies resulting from problem (19); thus, the local minimizer is located on the boundary between feasible and infeasible regions.
- All the analyses were performed on a work-station with an Intel Xeon E5-2697v2 processor (2.70–3.50 GHz, Santa Clara, CA, USA) and four cores dedicated to the optimization calculations. The highest computational time occurs for the NURBS solution illustrated in Figure 3 (i), which required about 1.5 h to find the local feasible minimizer.
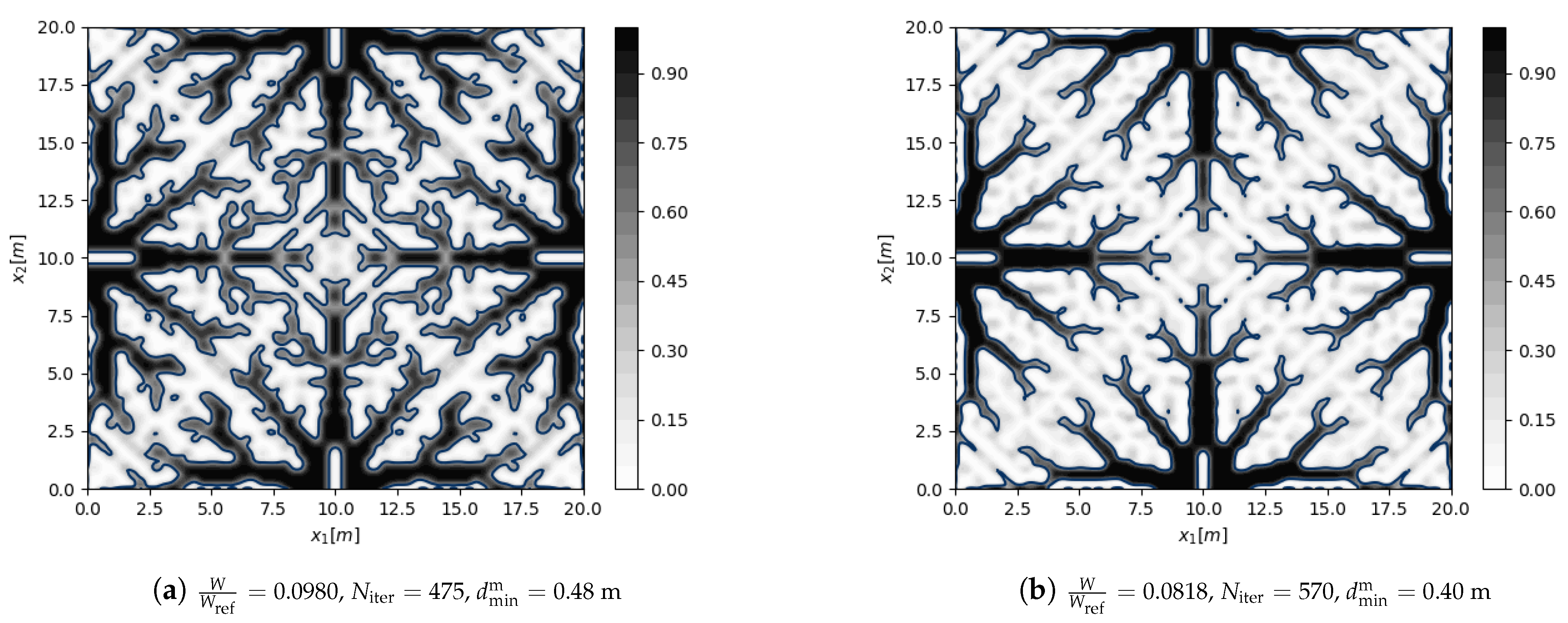
4.1.2. BK2-2D: Minimum Member Size Effect on the Optimized Topology
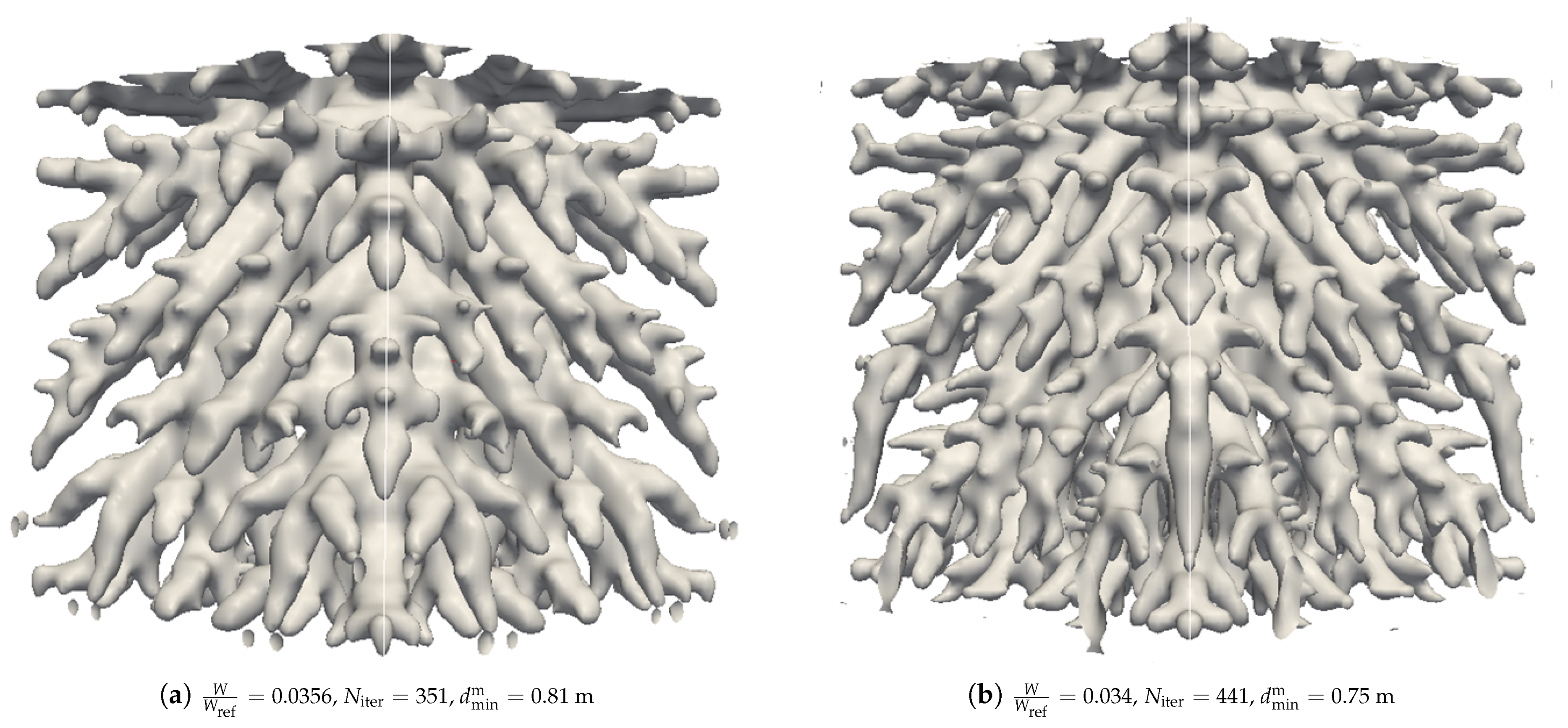
4.2. A 3D Benchmark Problem
5. Conclusions
- NURBS hyper-surfaces bring three advantages: (a) unlike the classical SIMP approach, a filter zone does not need to be introduced because the NURBS local support establishes an implicit relationship among the pseudo-density of contiguous mesh elements; (b) when compared to the classical SIMP approach, the number of design variables is reduced; (c) the CAD reconstruction of the boundary of the optimized topology is an easy task.
- A sensitivity analysis of the optimized topology to the NURBS integer parameters has been performed. Some general rules about the choice of the integer parameters can be drawn: the higher the number of CPs (for a given degree) or the lower the degree (for a given number of CPs) the smaller the objective function value, for both B-spline and NURBS solutions.
- The role of NURBS weights has been evaluated. In particular, by keeping the same number of CPs and the same degrees, the objective function of the NURBS solution is lower than that of the B-spline counterpart.
- The minimum-length scale requirement is correctly taken into account, without introducing an explicit optimization constraint, by properly setting the integer parameters of the NURBS entity. This is one of the most important advantages of the NURBS-based SIMP approach.
- The topological descriptor is not related to the mesh of the FE model. The FE model is only used to assess the physical responses of the problem at hand. The optimized topology can be easily extracted at the end of the optimization process because it is described by means of a pure geometrical entity, i.e., a CAD-compatible entity.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Garimella, V.; Fleischer, A.; Murthy, J.; Keshavarzi, A.; Prasher, R.; Patel, C.; Bhavnani, S.; Venkatasubramanian, R.; Mahajan, R.; Joshi, Y.; et al. Thermal Challenges in Next-Generation Electronic Systems. IEEE Trans. Compon. Packag. Technol. 2008, 31, 2577–2592. [Google Scholar] [CrossRef]
- Vassighi, A.; Sachdev, M. Thermal and Power Management of Integrated Circuits; Springer Science & Business Media: New York, NY, USA, 2006. [Google Scholar]
- Dong, X.; Liu, X. Multi-objective optimal design of microchannel cooling heat sink using topology optimization method. Numer. Heat Transf. Part A Appl. 2020, 77, 90–104. [Google Scholar] [CrossRef]
- Zhao, M.; Tian, Y.; Hu, M.; Zhang, F.; Yang, M. Topology optimization of fins for energy storage tank with phase change material. Numer. Heat Transf. Part A Appl. 2020, 77, 284–301. [Google Scholar] [CrossRef]
- Wang, S.; Li, S.; Luo, L.; Zhao, Z.; Du, W.; Sundén, B. A high temperature turbine blade heat transfer multilevel design platform. Numer. Heat Transf. Part A Appl. 2021, 79, 122–145. [Google Scholar] [CrossRef]
- Sun, S.; Liebersbach, P.; Qian, X. 3D topology optimization of heat sinks for liquid cooling. Appl. Therm. Eng. 2020, 178, 115540. [Google Scholar] [CrossRef]
- Zhang, B.; Zhu, J.; Gao, L. Topology optimization design of nanofluid-cooled microchannel heat sink with temperature-dependent fluid properties. Appl. Therm. Eng. 2020, 176, 115354. [Google Scholar] [CrossRef]
- Malekipour, E.; Tovar, A.; El-Mounayri, H. Heat Conduction and Geometry Topology Optimization of Support Structure in Laser-Based Additive Manufacturing. Mech. Addit. Adv. Manuf. 2018, 9, 17–27. [Google Scholar]
- Bendsoe, M.; Kikuchi, N. Generating optimal topologies in structural design using a homogenization method. Comput. Methods Appl. Mech. Eng. 1988, 71, 197–224. [Google Scholar] [CrossRef]
- Bendsoe, M.; Sigmund, O. Topology Optimization-Theory, Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Eschenauer, H.; Olhoff, N. Topology Optimization of Continuum Structures: A Review. Appl. Mech. Rev. 2001, 54, 331–389. [Google Scholar] [CrossRef]
- Suzuki, K.; Kikuchi, N. A homogenization method for shape and topology optimization. Comput. Methods Appl. Mech. Eng. 2001, 93, 291–318. [Google Scholar] [CrossRef] [Green Version]
- Bendsoe, M. Optimal shape design as a material distribution problem. Struct. Optim. 1989, 1, 193–202. [Google Scholar] [CrossRef]
- Sethian, J.; Wiegmann, A. Structural Boundary Design via Level Set and Immersed Interface Methods. J. Comput. Phys. 2000, 163, 489–528. [Google Scholar] [CrossRef]
- Wang, M.; Wang, X.; Guo, D. A level set method for structural topology optimization. Comput. Methods Appl. Mech. Eng. 2013, 192, 227–246. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, W.; Zhang, J.; Yuan, J. Explicit structural topology optimization based on moving morphable components (MMC) with curved skeletons. Comput. Methods Appl. Mech. Eng. 2016, 310, 711–748. [Google Scholar] [CrossRef]
- Xie, Y.M.; Steven, G.P. A simple evolutionary procedure for structural optimization. Comput. Struct. 1993, 49, 885–896. [Google Scholar] [CrossRef]
- Huang, X.; Xie, Y.M. Bi-directional evolutionary topology optimization of continuum structures with one or multiple materials. Comput. Mech. 2009, 43, 393. [Google Scholar] [CrossRef]
- Huang, X.; Xie, Y.M. Evolutionary Topology Optimization of Continuum Structures: Methods and Applications; John Wiley & Sons, Ltd: Hoboken, NJ, USA, 2010. [Google Scholar]
- Li, Q.; Steven, G.P.; Querin, O.M.; Xie, Y.M. Shape and topology design for heat conduction by evolutionary structural optimization. Int. J. Heat Mass Transf. 1999, 42, 3361–3371. [Google Scholar] [CrossRef]
- Li, Q.; Steven, G.P.; Xie, Y.M.; Querin, O.M. Evolutionary topology optimization for temperature reduction of heat conducting fields. Int. J. Heat Mass Transf. 2004, 47, 5071–5083. [Google Scholar] [CrossRef]
- Zhuang, C.G.; Xiong, Z.H.; Han, D. A level set method for topology optimization of heat conduction problem under multiple load cases. Comput. Method Appl. Mech. Eng. 2007, 196, 1074–1084. [Google Scholar] [CrossRef]
- Yoon, G. Topological design of heat dissipating structure with forced convective heat transfer. J. Mech. Sci. Technol. 2010, 24, 1225–1233. [Google Scholar] [CrossRef]
- Ikonen, T.; Marck, G.; Sóbester, A.; Keane, A. Topology optimization of conductive heat transfer problems using parametric L-systems. Struct. Multidiscip. Optim. 2018, 58, 1899–1916. [Google Scholar] [CrossRef] [Green Version]
- Hu, D.; Zhang, Z.; Li, Q. Numerical study on flow and heat transfer characteristics of microchannel designed using topological optimizations method. Sci. China Tech. Sci. 2020, 63, 105–115. [Google Scholar] [CrossRef]
- Yoon, M.; Koo, B. Topology design optimization of conductive thermal problems subject to design-dependent load using density gradients. Adv. Mech. Eng. 2019, 11, 1–11. [Google Scholar] [CrossRef]
- Iga, A.; Nishiwaki, S.; Izui, K.; Yoshimura, M. Topology optimization for thermal conductors considering design-dependent effects, including heat conduction and convection. Int. J. Heat Mass Transf. 2009, 52, 2721–2732. [Google Scholar] [CrossRef]
- Dbouk, T. A review about the engineering design of optimal heat transfer systems using topology optimization. Appl. Therm. Eng. 2017, 112, 841–854. [Google Scholar] [CrossRef]
- Allaire, G. Shape Optimization by the Homogenization Method; Springer: New York, NY, USA, 2002. [Google Scholar]
- Guest, J.K.; Prévost, J.H.; Belytschko, T. Achieving minimum length scale in topology optimization using nodal design variables and projection functions. Int. J. Numer. Methods Eng. 2003, 61, 238–254. [Google Scholar] [CrossRef]
- Lazarov, B.S.; Wang, F.; Sigmund, O. Length scale and manufacturability in density-based topology optimization. Arch. Appl. Mech. 2016, 86, 189–218. [Google Scholar] [CrossRef] [Green Version]
- Costa, G.; Montemurro, M.; Pailhès, J. A 2D topology optimisation algorithm in NURBS framework with geometric constraints. Int. J. Mech. Mater. Des. 2018, 14, 669–696. [Google Scholar] [CrossRef] [Green Version]
- Costa, G.; Montemurro, M.; Pailhès, J. NURBS Hyper-surfaces for 3D Topology Optimisation Problems. Mech. Adv. Mater. Struct. 2021, 28, 665–684. [Google Scholar] [CrossRef]
- Costa, G.; Montemurro, M.; Pailhès, J.; Perry, N. Maximum length scale requirement in a topology optimisation method based on NURBS hyper-surfaces. CIRP Ann. 2019, 68, 153–156. [Google Scholar] [CrossRef] [Green Version]
- Costa, G.; Montemurro, M.; Pailhès, J. Minimum Length Scale Control in a NURBS-based SIMP Method. Comput. Methods Appl. Mech. Eng. 2019, 354, 963–989. [Google Scholar] [CrossRef]
- Rodriguez, T.; Montemurro, M.; Le Texier, P.; Pailhès, J. Structural Displacement Requirement in a Topology Optimization Algorithm Based on Isogeometric Entities. J. Optim. Theory Appl. 2020, 184, 250–276. [Google Scholar] [CrossRef]
- Bertolino, G.; Montemurro, M.; Perry, N.; Pourroy, F. An Efficient Hybrid Optimization Strategy for Surface Reconstruction. Computer Graphics Forum 2021. [Google Scholar] [CrossRef]
- Costa, G.; Montemurro, M. Eigen-frequencies and harmonic responses in topology optimisation: A CAD-compatible algorithm. Eng. Struct. 2020, 214, 110602. [Google Scholar] [CrossRef]
- Montemurro, M.; Bertolino, G.; Roiné, T. A General Multi-Scale Topology Optimisation Method for Lightweight Lattice Structures Obtained through Additive Manufacturing Technology. Compos. Struct. 2021, 258, 113360. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book; Springer: Berlin/Heidelberg, Germany; New York, NY, USA,, 1997. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L.; Zhu, J.Z. The Finite Element Method: Its Basis and Fundamentals; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Svanberg, K. A class of globally convergent optimization methods based on conservative convex separable approximations. SIAM J. Optim. 2002, 12, 555–573. [Google Scholar] [CrossRef] [Green Version]
- Alexandersen, J. Topology Optimization for Convection Problems. Master’s Thesis, DTU Mekanik, Kongens Lyngby, Denmark, 2011. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| move | 0.1 |
| albefa | 0.1 |
| Stop Criterion | Value |
| Maximum n. of function evaluations | |
| Maximum n. of iterations | 1000 |
| Tolerance on objective function | |
| Tolerance on constraints | |
| Tolerance on input variables change | |
| Tolerance on Karush–Kuhn–Tucker norm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montemurro, M.; Refai, K. A Topology Optimization Method Based on Non-Uniform Rational Basis Spline Hyper-Surfaces for Heat Conduction Problems. Symmetry 2021, 13, 888. https://doi.org/10.3390/sym13050888
Montemurro M, Refai K. A Topology Optimization Method Based on Non-Uniform Rational Basis Spline Hyper-Surfaces for Heat Conduction Problems. Symmetry. 2021; 13(5):888. https://doi.org/10.3390/sym13050888
Chicago/Turabian StyleMontemurro, Marco, and Khalil Refai. 2021. "A Topology Optimization Method Based on Non-Uniform Rational Basis Spline Hyper-Surfaces for Heat Conduction Problems" Symmetry 13, no. 5: 888. https://doi.org/10.3390/sym13050888
APA StyleMontemurro, M., & Refai, K. (2021). A Topology Optimization Method Based on Non-Uniform Rational Basis Spline Hyper-Surfaces for Heat Conduction Problems. Symmetry, 13(5), 888. https://doi.org/10.3390/sym13050888