
Seismic Imaging of Mineral Exploration Targets: Evaluation of Ray- vs. Wave-Equation-Based Pre-Stack Depth Migrations for Crooked 2D Profiles



Abstract
:1. Introduction
2. Materials and Methods
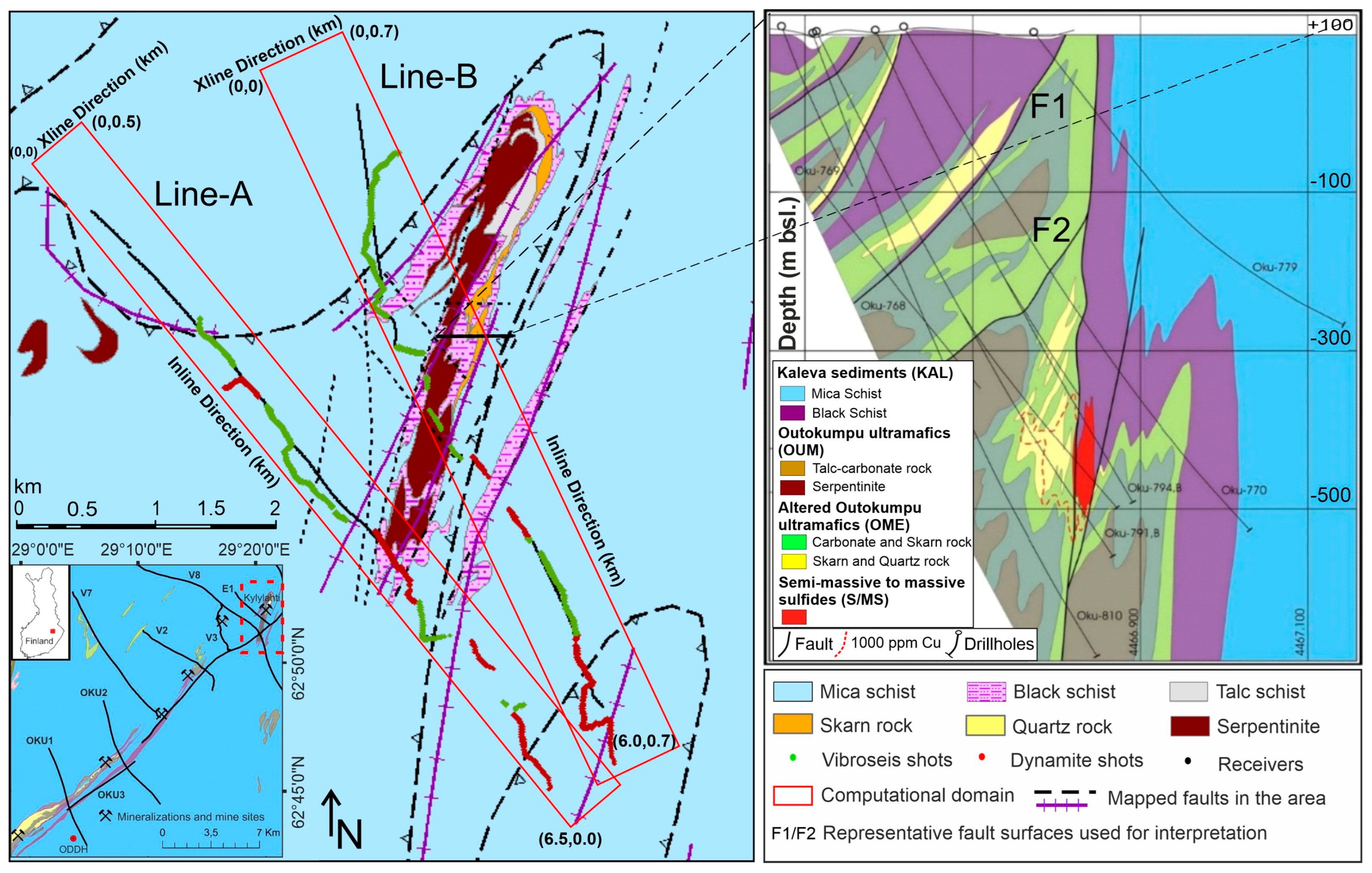
2.1. Geological Background
2.2. COGITO-MIN 2D Seismic Survey
2.3. Data Pre-Processing
2.4. Velocity Model Building in Hardrock Environment
2.5. Basic Theory of Ray-Based and Wave-Equation-Based Depth Imaging Methods
3. Results
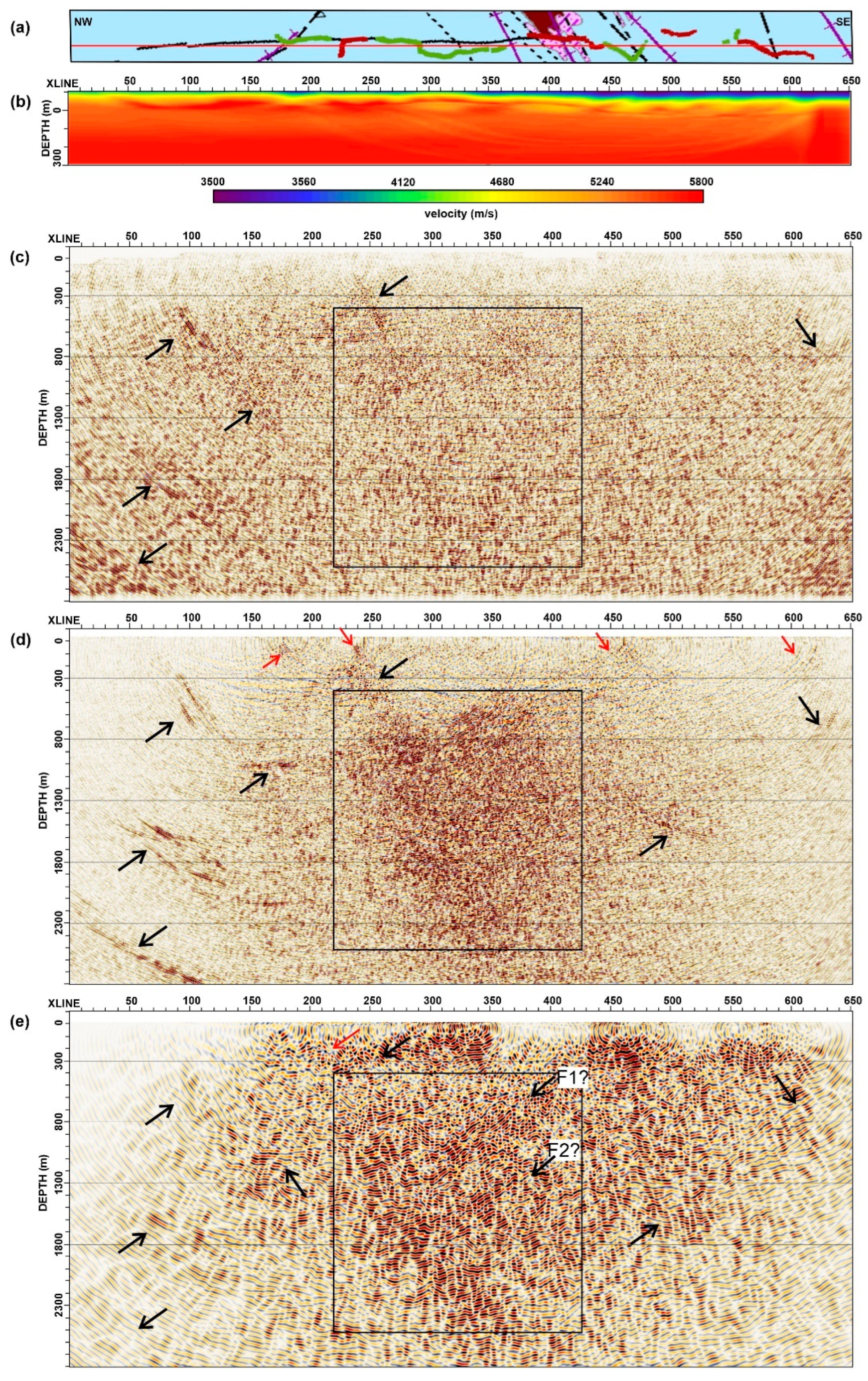
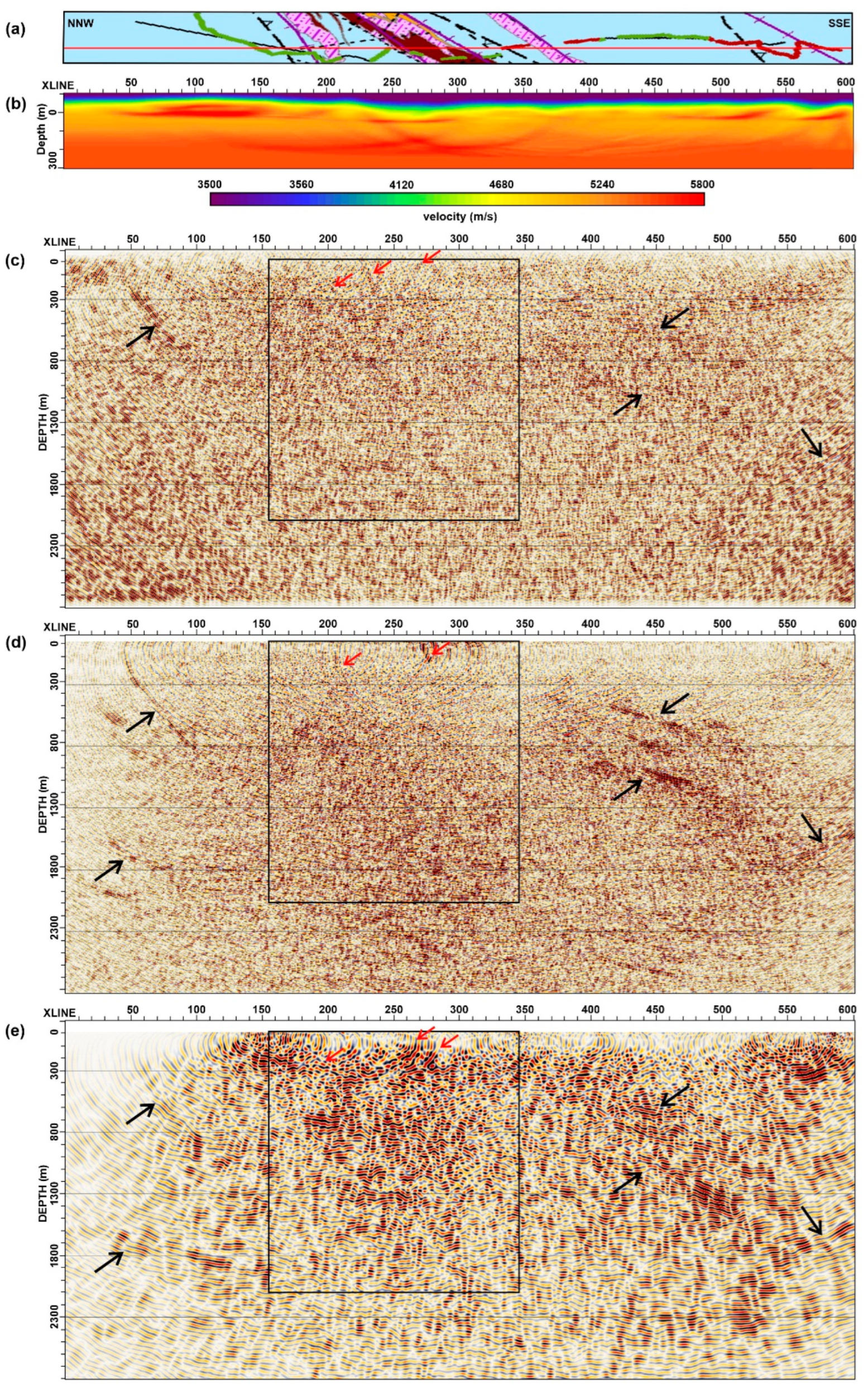
3.1. Velocity Model Building
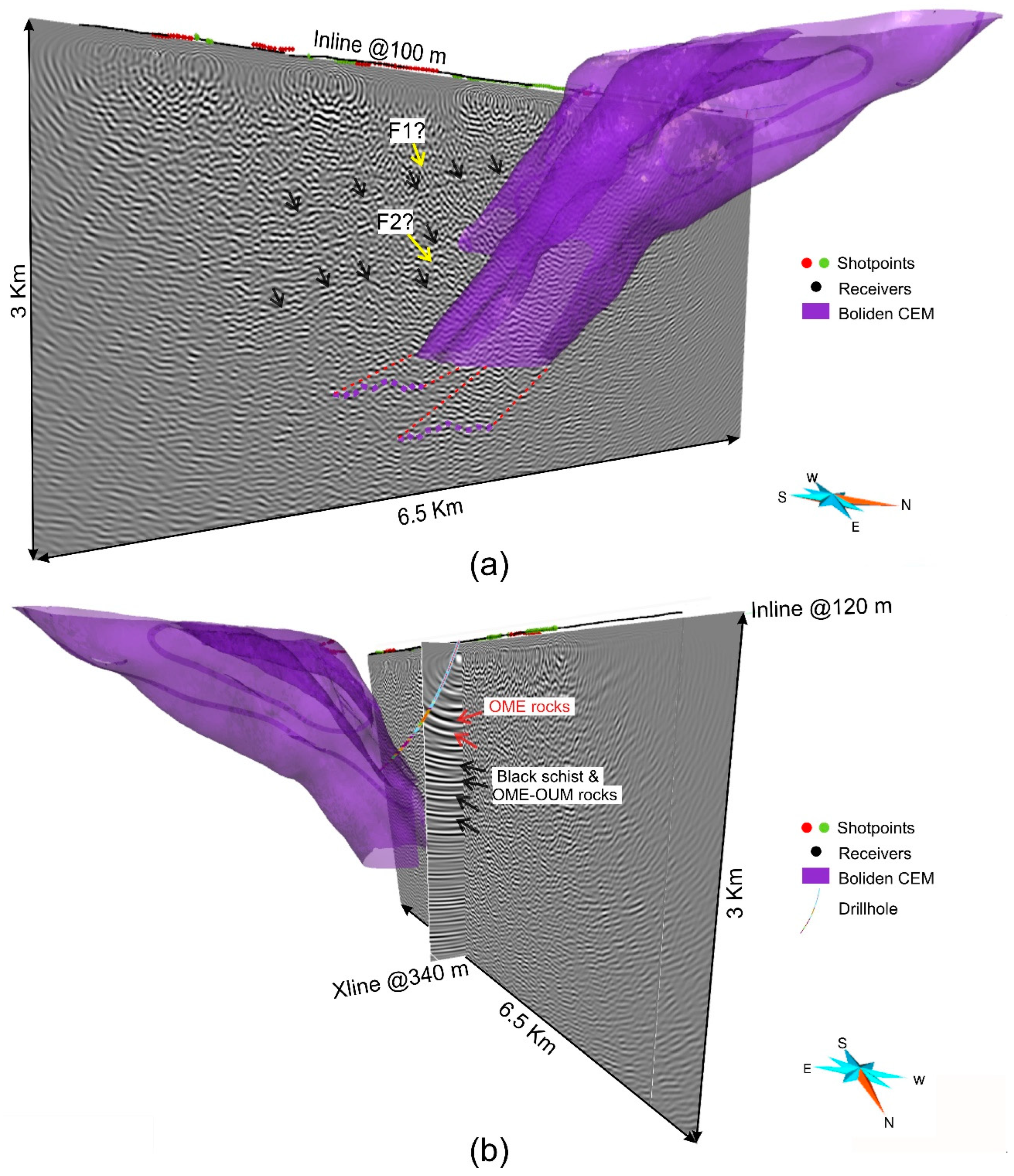
3.2. Comparison of Migration Results
4. Interpretation and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Malehmir, A.; Durrheim, R.; Bellefleur, G.; Urosevic, M.; Juhlin, C.; White, D.J.; Milkereit, B.; Campbell, G. Seismic methods in mineral exploration and mine planning: A general overview of past and present case histories and a look into the future. Geophysics 2012, 77, WC173–WC190. [Google Scholar] [CrossRef]
- Reed, L.E. Seismic Reflection Surveying for Mining Exploration Applications. In A Review of Practice Past and Current with an Outlook for the Future; Mineral Industry Technology Council of Canada (MI-TEC) Report: Toronto, ON, Canada, 1993; 219p. [Google Scholar]
- Bellefleur, G.; Cheraghi, S.; Malehmir, A. Reprocessing legacy three-dimensional seismic data from the Halfmile Lake and Brunswick No. 6 volcanogenic massive sulphide deposits, New Brunswick, Canada. Can. J. Earth Sci. 2018, 56, 569–583. [Google Scholar] [CrossRef]
- Bellefleur, G.; Schetselaar, E.; White, D.; Miah, K.; Dueck, P. 3D seismic imaging of the Lalor volcanogenic massive sulphide deposit, Manitoba, Canada. Geophys. Prospect. 2015, 63, 813–832. [Google Scholar] [CrossRef]
- Cheraghi, S.; Malehmir, A.; Bellefleur, G. 3D imaging challenges in steeply dipping mining structures: New lights on acquisition geometry and processing from the Brunswick no. 6 seismic data, Canada. Geophysics 2012, 77, WC109–WC122. [Google Scholar] [CrossRef]
- Koivisto, E.; Malehmir, A.; Hellqvist, N.; Voipio, T.; Wijns, C. Building a 3D model of lithological contacts and near-mine structures in the Kevitsa mining and exploration site, Northern Finland: Constraints from 2D and 3D reflection seismic data. Geophys. Prospect. 2015, 63, 754–773. [Google Scholar] [CrossRef]
- Malehmir, A.; Bellefleur, G. 3D seismic reflection imaging of volcanic-hosted massive sulfide deposits: Insights from reprocessing Halfmile Lake data, New Brunswick, Canada. Geophysics 2009, 74, B209–B219. [Google Scholar] [CrossRef]
- Malehmir, A.; Markovic, M.; Marsden, P.; Gil, A.; Buske, S.; Sito, L.; Bäckström, E.; Sadeghi, M.; Luth, S. Sparse 3D reflection seismic survey for deep-targeting iron oxide deposits and their host rocks, Ludvika Mines, Sweden. Solid Earth 2021, 12, 483–502. [Google Scholar] [CrossRef]
- Malehmir, A.; Tryggvason, A.; Wijns, C.; Koivisto, E.; Lindqvist, T.; Skyttä, P.; Montonen, M. Why 3D seismic data are an asset for exploration and mine planning? Velocity tomography of weakness zones in the Kevitsa Ni-Cu-PGE mine, northern Finland. Geophysics 2018, 83, B33–B46. [Google Scholar] [CrossRef]
- Milkereit, B.; Berrer, E.K.; King, A.R.; Watts, A.H.; Roberts, B.; Adam, E.; Eaton, D.W.; Wu, J.; Salisbury, M.H. Development of 3-D seismic exploration technology for deep nickel-copper deposits—A case history from the Sudbury basin, Canada. Geophysics 2000, 65, 1890–1899. [Google Scholar] [CrossRef]
- White, D.J.; Malinowski, M.; Devine, C.; Gilmore, K.; Schetselaar, E.; Pehrsson, S. Drill Targeting with 3-D Seismics for Volcanogenic Massive Sulfide Exploration in the Flin Flon Mining Camp. Econ. Geol. 2016, 111, 903–912. [Google Scholar] [CrossRef]
- White, D.J.; Secord, D.; Malinowski, M. 3D seismic imaging of volcanogenic massive sulfide deposits in the Flin Flon mining camp, Canada: Part 1—Seismic results. Geophysics 2012, 77, WC47–WC58. [Google Scholar] [CrossRef]
- Cheraghi, S.; Naghizadeh, M.; Snyder, D.; Haugaard, R.; Gemmell, T. High-Resolution seismic imaging of crooked two-dimensional profiles in greenstone belts of the Canadian shield: Results from the Swayze area, Ontario, Canada. Geophys. Prospect. 2020, 68, 62–81. [Google Scholar] [CrossRef]
- Nedimović, M.R.; West, G.F. Crooked-Line 2D seismic reflection imaging in crystalline terrains: Part 2, migration. Geophysics 2003, 68, 286–296. [Google Scholar] [CrossRef]
- White, D.; Malinowski, M. Interpretation of 2D seismic profiles in complex geological terrains: Examples from the Flin Flon mining camp, Canada. Geophysics 2012, 77, WC37–WC46. [Google Scholar] [CrossRef]
- Malehmir, A.; Maries, G.; Bäckström, E.; Schon, M.; Marsden, P. Developing cost-effective seismic mineral exploration methods using a landstreamer and a drophammer. Sci. Rep. 2017, 7, 10325. [Google Scholar] [CrossRef]
- Markovic, M.; Maries, G.; Malehmir, A.; Ketelhodt, J.V.; Bäckström, E.; Schon, M.; Marsden, P. Deep reflection seismic imaging of iron-oxide deposits in the Ludvika mining area of central Sweden. Geophys. Prospect. 2020, 68, 7–23. [Google Scholar] [CrossRef]
- Bräunig, L.; Buske, S.; Malehmir, A.; Bäckström, E.; Schön, M.; Marsden, P. Seismic depth imaging of iron-oxide deposits and their host rocks in the Ludvika mining area of central Sweden. Geophys. Prospect. 2020, 68, 24–43. [Google Scholar] [CrossRef]
- Heinonen, S.; Malinowski, M.; Hloušek, F.; Gislason, G.; Buske, S.; Koivisto, E.; Wojdyla, M. Cost-Effective Seismic Exploration: 2D Reflection Imaging at the Kylylahti Massive Sulfide Deposit, Finland. Minerals 2019, 9, 263. [Google Scholar] [CrossRef]
- Hloušek, F.; Hellwig, O.; Buske, S. Three-Dimensional focused seismic imaging for geothermal exploration in crystalline rock near Schneeberg, Germany. Geophys. Prospect. 2015, 63, 999–1014. [Google Scholar] [CrossRef]
- Hloušek, F.; Malinowski, M.; Bräunig, L.; Buske, S.; Malehmir, A.; Markovic, M.; Sito, Ł.; Marsden, P.; Bäckström, E. Three-dimensional reflection seismic imaging of the iron oxide deposits in the Ludvika mining area, Sweden, using Fresnel volume Migration. Solid Earth 2022, 13, 917–934. [Google Scholar] [CrossRef]
- Singh, B.; Malinowski, M.; Hloušek, F.; Koivisto, E.; Heinonen, S.; Hellwig, O.; Buske, S.; Chamarczuk, M.; Juurela, S. Sparse 3D Seismic Imaging in the Kylylahti Mine Area, Eastern Finland: Comparison of Time Versus Depth Approach. Minerals 2019, 9, 305. [Google Scholar] [CrossRef]
- Hloušek, F.; Hellwig, O.; Buske, S. Improved structural characterization of the Earth’s crust at the German Continental Deep Drilling Site using advanced seismic imaging techniques. J. Geophys. Res. Solid Earth 2015, 120, 6943–6959. [Google Scholar] [CrossRef]
- Liu, G.; Meng, X.; Ni, J.; Chen, Z.; Zhang, D. Evaluation of the 2D reflection seismic method toward the exploration of thrust-controlled mineral deposits in southwestern Fujian Province, China. Geophysics 2018, 83, B209–B220. [Google Scholar] [CrossRef]
- Ding, Y.; Malehmir, A. Reverse time migration (RTM) imaging of iron oxide deposits in the Ludvika mining area, Sweden. Solid Earth 2021, 12, 1707–1718. [Google Scholar] [CrossRef]
- Singh, B.; Malinowski, M.; Górszczyk, A.; Malehmir, A.; Buske, S.; Sito, Ł.; Marsden, P. 3D high-resolution seismic imaging of the iron oxide deposits in Ludvika (Sweden) using full-waveform inversion and reverse time migration. Solid Earth 2022, 13, 1065–1085. [Google Scholar] [CrossRef]
- Peltonen, P.; Kontinen, A.; Huhma, H.; Kuronen, U. Outokumpu revisited: New mineral deposit model for the mantle peridotite-associated Cu-Co-Zn-Ni-Ag-Au sulphide deposits. Ore Geol. Rev. 2008, 33, 559–617. [Google Scholar] [CrossRef]
- Luhta, T. Petrophysical Properties of the Kylylahti Cu-Au-Zn Sulphide Mineralization and Its Host Rocks. Master’s Thesis, University of Helsinki, Helsinki, Finland, 2019. Available online: https://helda.helsinki.fi/handle/10138/302130 (accessed on 23 September 2022).
- Koivisto, E.; Malinowski, M.; Heinonen, S.; Cosma, C.; Wojdyla, M.; Vaittinen, K.; Chamarczuk, M.; Riedel, M.; Kukkonen, I. The COGITO-MIN Working Group. From regional seismics to high-resolution resource delineation: Example from the Outokumpu Ore District, Eastern Finland. In 2nd Conference on Geophysics for Mineral Exploration and Mining; European Association of Geoscientists & Engineers: Porto, Portugal, 2018; pp. 1–5. [Google Scholar]
- Stork, C. Reflection tomography in the postmigrated domain. Geophysics 1992, 57, 670–751. [Google Scholar] [CrossRef]
- Liu, G.; Meng, X.; Sea, J.G. Case study: Improving the quality of the seismic reflection image for a Fujian mineral exploration data set with offset-domain common-image gathers. Geophysics 2021, 86, B277–B289. [Google Scholar] [CrossRef]
- Singh, B.; Malinowski, M.; Górszczyk, A.; Malehmir Hloušek, F.A.; Buske, S.; Sito, Ł.; Marsden, P. 3D Velocity Model Building in Hardrock Environment Using FWI: A Case Study from Blötberget Mine, Sweden. In NSG2020 3rd Conference on Geophysics for Mineral Exploration and Mining; European Association of Geoscientists & Engineers: Bordeaux, France, 2020; pp. 1–5. [Google Scholar]
- Etgen, J.; Gray, S.H.; Zhang, Y. An overview of depth imaging in exploration geophysics. Geophysics 2009, 74, WCA5–WCA17. [Google Scholar] [CrossRef]
- Mulder, W.A.; Plessix, R.E. A comparison between one-way and two-way wave-equation migration. Geophysics 2004, 69, 1491–1504. [Google Scholar] [CrossRef]
- Schneider, W.A. Integral formulation for migration in two and three dimensions. Geophysics 1998, 43, 49–76. [Google Scholar] [CrossRef]
- Zhou, H.-W.; Hu, H.; Zou, Z.; Wo, Y.; Youn, O. Reverse time migration: A prospect of seismic imaging methodology. Earth-Sci. Rev. 2018, 179, 207–227. [Google Scholar] [CrossRef]
- Claerbout, J.F. Toward a unified theory of reflector mapping. Geophysics 1971, 36, 467–481. [Google Scholar] [CrossRef]
- Youn, O.K.; Zhou, H. Depth imaging with multiples. Geophysics 2001, 66, 246–255. [Google Scholar] [CrossRef]
- Zhang, J.; Toksöz, M.N. Nonlinear refraction traveltime tomography. Geophysics 1998, 63, 1726–1737. [Google Scholar] [CrossRef]
- Araya-polo, M.; Cabezas, J.; Hanzich, M.; Pericas, M.; Rubio, F.; Gelado, I.; Shafiq, M.; Morancho, E.; Navarro, N.; Ayguade, E.; et al. Assessing Accelerator-Based HPC Reverse Time Migration. IEEE Trans. Parallel Distrib. Syst. 2010, 22, 147–162. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Acquisition | Line-A | Line-B |
|---|---|---|
| Receiver Spacing (m) | 10 | |
| Source Spacing (m) | 20 | |
| Vibroseis Sweep (Hz) | 4–220 | |
| Number of Sweeps/Shot Point | 3 | |
| Dynamite Charge Size (g) | 120–240 g | |
| Shot Hole Depth (m) | 1.5–2.5 | |
| Channels | 577 | 574 |
| Vibroseis Source Points | 121 | 152 |
| Dynamite Source Points | 98 | 85 |
| Process | Parameter |
|---|---|
| Data Read | 3.0 s SEG-Y Data |
| Match Filter | Match Dynamite to Vibroseis |
| Geometry Setup * | Crooked Line; 5 m CDP Spacing |
| Refraction Statics ** Elevation statics | 2-Layer Model Floating datum |
| Spherical Divergence Correction | v2t Function |
| Bandpass Filter | 42-48-200-220 Hz |
| Automatic Gain Control (AGC) | 250 ms |
| Deconvolution | Spiking 150 ms/Predictive 150/12 ms |
| Airwave Mute | 330 m/s |
| Coherency Filter | F-X Decon., 15 Traces—100 ms Window |
| Linear Noise Removal | Velocity-steered Median Filter V = 2000, 3000 and 5000 m/s |
| Bandpass Filter | 42-48-200-220 Hz |
| AGC | 250 ms |
| Residual Statics | 2 passes |
| Top Mute | Offset-based, 50 ms below the first-breaks |
| Output Data | SEG-Y |
| Line | KPreSDM | CM | RTM |
|---|---|---|---|
| Line-A | ~1.3 h | ~19.6 h | ~112.8 h |
| Line-B | ~1.5 h | ~29.2 h | ~137.3 h |
| Feature | KPreSDM | CM | RTM |
| Steep events close to surface |  |  |  |
| Large-scale structures/reflections |  |  |  |
| Detailed reflectivity inside the Kylylahti structure | Χ | Χ |  |
| Reflection from the ore lens | Χ | Χ |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, B.; Malinowski, M. Seismic Imaging of Mineral Exploration Targets: Evaluation of Ray- vs. Wave-Equation-Based Pre-Stack Depth Migrations for Crooked 2D Profiles. Minerals 2023, 13, 264. https://doi.org/10.3390/min13020264
Singh B, Malinowski M. Seismic Imaging of Mineral Exploration Targets: Evaluation of Ray- vs. Wave-Equation-Based Pre-Stack Depth Migrations for Crooked 2D Profiles. Minerals. 2023; 13(2):264. https://doi.org/10.3390/min13020264
Chicago/Turabian StyleSingh, Brij, and Michał Malinowski. 2023. "Seismic Imaging of Mineral Exploration Targets: Evaluation of Ray- vs. Wave-Equation-Based Pre-Stack Depth Migrations for Crooked 2D Profiles" Minerals 13, no. 2: 264. https://doi.org/10.3390/min13020264
APA StyleSingh, B., & Malinowski, M. (2023). Seismic Imaging of Mineral Exploration Targets: Evaluation of Ray- vs. Wave-Equation-Based Pre-Stack Depth Migrations for Crooked 2D Profiles. Minerals, 13(2), 264. https://doi.org/10.3390/min13020264